Изобретение относится к радиотехнике, в частности к радиолокации, и может быть использовано для обзора передней полусферы (нижней и верхней) в легких маневренных самолетах и вертолетах, имеющих минимум приборного оборудования. Также может быть использовано для предупреждения столкновений с другими летательными аппаратами, высоковольтными линиями электропередач, вышками, трубами и т.д.
Легкомоторная авиация - это вид авиации малого тоннажа (1-3 т) и пассажировместимости (4-12) человек, включая пилота. Этот вид авиации очень широко распространен в США, Канаде, Австралии и других странах, так, например, в США общее число легкомоторных самолетов достигает нескольких сот тысяч. В настоящее время легкомоторная авиация получает широкое распространение и в России, если ранее широко выпускался только один вид легкомоторного самолета (широкоизвестный Ан-2), то в настоящее время, почти все самолетостроительные фирмы выпускают легкомоторные самолеты, например Бе-103, Че-25 и др. Особенностью таких самолетов (включая зарубежные) является минимум приборного пилотажного оборудования: в основном это указатель скорости, приемник воздушного давления с датчиком угла атаки и скольжения, и высотомер, даже авиагоризонт ставится далеко не на всех типах, а радиолокатор не ставится нигде, по вполне понятным причинам, хотя необходимость и желательность его применения очевидна. С развитием микросхемотехники и микроволновой техники эта задача становится реальностью.
Известен самолетный радиолокатор обзора передней полусферы и земной поверхности, который устанавливаются почти на всех средне и дальне-магистральных самолетах гражданской авиации СССР, России и СНГ, см. "Развитие авиационной науки и техники в СССР", Наука, М., 1980 г., стр.386, 391. Этот радиолокатор, а точнее радиолокационный визир (РЛВ) "Гроза" служит для определения местоположения самолета относительно контрастных в радиолокационном отношении ориентиров и выявления безопасных проходов в грозовых фронтах.
При удачной конструкции и приемлемых тактико-технических характеристиках этот РЛВ обладает также большими ГМХ и потребляемой мощностью, т.е. о применении его на самолетах легкомоторной авиации говорить не приходится.
Известны спутниковые системы навигации, т.е. определение местонахождения самолета в данный конкретный момент, показывающие географическую широту и долготу, также воздушную обстановку в радиусе 10-15 км от данного самолета, см. "Портативные приемники" в Интернете Garmin.ru, авиационные приемники, GPS 12 Pilot+.
При крайне малых ГМХ эта система обладает следующими недостатками:
- довольно дорогая, порядка нескольких тысяч долларов;
- не показывает (не сигнализирует) об опасном сближении с другим самолетом.
В настоящее время в тяжелой и средней (по тоннажу) авиации широко используется международная "Система предупреждения столкновений TCAS", которой пользуется почти вся мировая авиация, для предупреждения столкновений в воздухе и с земной поверхностью - ПРОТОТИП. Эта система довольно дорога, имеет довольно большие габаритно-массовые характеристики (ГМХ), требует наличия двух выступающих антенн, не показывает радиолокационный рельеф земной поверхности, например земля/вода, не показывает наличие грозовых фронтов, требует оборудования всех самолетов активными ответчиками.
Технической задачей изобретения является повышение безопасности полета легкомоторного самолета за счет:
- выдачи визуальной информации (отображение ее на экране индикатора) пилоту о воздушной и наземной радиолокационной обстановке в передней полусфере;
- выдача тревожной звуковой (речевой) и световой информации об опасном сближении с другим самолетом или высоким наземным препятствием (типа вышки, трубы, линии ЛЭП и др.).
Для решения поставленной задачи предлагается радиолокатор для легкомоторного самолета, содержащий синхронизатор, задающий генератор, передатчик, приемник, циркулятор, антенну, индикатор, микроконтроллер, фазовые коммутаторы, сумматор и блок тревожной сигнализации, при этом радиолокатор схемно и конструктивно выполнен в виде трех частей: первой и второй фазированных антенных подрешеток и управляющего вычислительного блока, в каждую из подрешеток входит: 1-N излучателей, фазовый коммутатор, фазовый циркулятор, первый автогенератор и малошумящий усилитель, а в управляюще-вычислительный блок входит: сумматор, приемник, микроконтроллер, второй автогенератор, жидкокристаллический дисплей и блок тревожной сигнализации со следующими соединениями: микроконтроллер первой шиной управления соединен с фазовыми коммутаторами обеих подрешеток, второй шиной управления - с приемником и ЖКИ, четвертой шиной управления с вторым автогенератором, а сигнальной шиной - с блоком тревожной сигнализации; второй автогенератор шиной синхронизации соединен с первыми автогенераторами обеих антенных подрешеток, выходы которых соединены с входами ферритовых циркуляторов также обеих антенных подрешеток, вторые шины входа/выхода ферритовых циркуляторов соединены с фазовыми коммутаторами, которые в свою очередь первой шиной входа/выхода соединены с излучателями антенных подрешеток; выход ферритовых циркуляторов соединены с МШУ, выходы МШУ обеих антенных подрешеток соединены через сумматор с приемником, который информационной шиной соединен с микроконтроллером, а сигнальным выходом - с ЖКИ; первая фазированная антенная подрешетка образует диаграмму направленности антенны в горизонтальной плоскости, а вторая - в вертикальной; общая диаграмма направленности антенны игольчатая, приблизительно 5° по вертикали и горизонтали, а сложение мощностей излучателей - пространственное; антенные излучатели обеих подрешеток выполнены в виде отрезков печатных проводников, а антенные подрешетки образуют растровый обзор пространства.
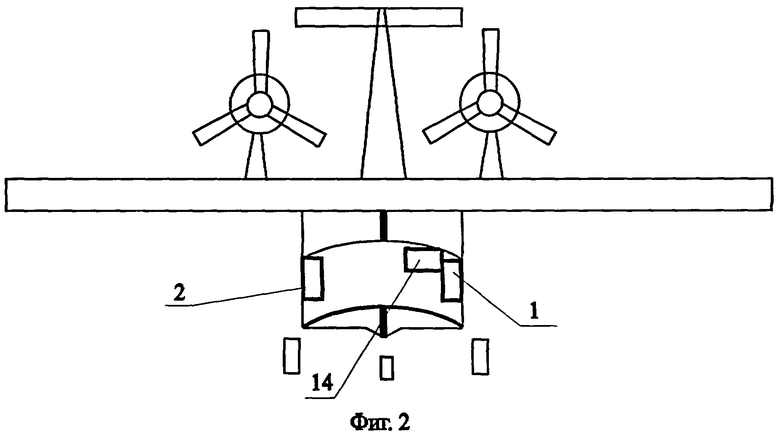
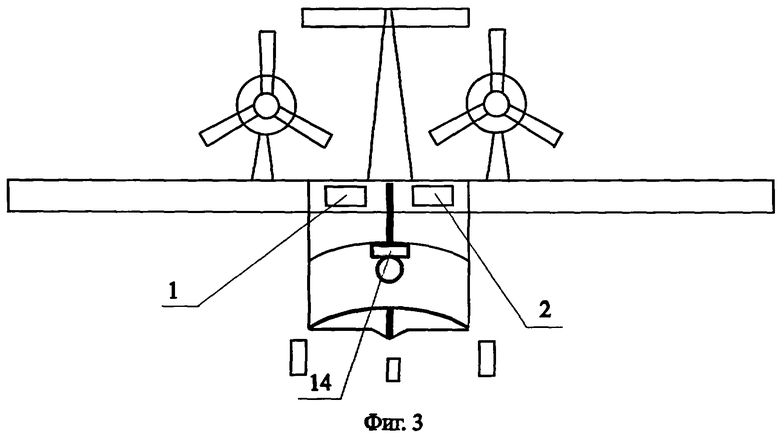
На фиг.1 показана структурная схема радиолокатора для легкомоторных самолетов, на фиг.2 - пример размещения антенных подрешеток в носовой части фюзеляжа, на фиг.3 - в крыле, на фиг.4 - примерный вид ЖКИ с отметками цели, на которых изображено: 1 и 2 - первая и вторая антенные подрешетки соответственно, 3-N - излучатели; 4 - фазовый коммутатор, 5,12 - автогенераторы (АГ), 6 - фазовый циркулятор (ФЦ), 7 - малошумящий усилитель (МШУ), 8 - сумматор, 9 - блок тревожной сигнализации, 10 - приемник, 11 - жидкокристаллический дисплей (ЖКИ), 13 - микроконтроллер (МК), 14 - управляюще-вычислительный блок, шины входа/выхода, шины управления, шина синхронизации.
Излучатели 3-N первой подрешетки ФАР1 соединены первой шиной входа\выхода с фазовым коммутатором 4, который второй шиной входа\выхода соединен с ферритовым циркулятором 6, выход которого через МШУ7 соединен с первым входом сумматора 8, выход последнего соединен с входом приемника 10, который сигнальным соединен с сигнальным входом ЖКИ 11 и микроконтроллером 13; микроконтроллер 13 третьей управляющей шиной соединен с ЖКИ 11, второй управляющей шиной - с ФЦ 6, первой управляющей шиной - с ФК 4, шиной запуска - с АГ 2, выход которого соединен с шиной запуска АГ 1, который своим выходом соединен с входом ФЦ 6, выход микроконтроллера 13 соединен с схемой тревожной сигнализации 9, второй вход сумматора 8 соединен с выходом МШУ второй подрешетки, а вторая и первая шины управления дополнительно соединены с ФЦ и ФК второй подрешетки, которая также имеет вход шины синхронизации.
Указанные узлы и блоки могут быть выполнены на следующих ЭРЭ и ИМС: излучатели 3-N - на печатных излучателях, см. "Антенны и устройства СВЧ" под ред. Д.И.Воскресенского, М., Р и С, 1994, стр.51-52; ферритовые циркуляторы 6 по схеме, см. "Антенны и устройства СВЧ" под ред. Д.И. Воскресенского, М., Р и С, 1994, стр.329-333; фазовый коммутатор 4 - на p-i-n диодах с использованием микрополосковых линий (МПЛ), см. "Микроэлектронные устройства СВЧ" под ред. Г.Н.Веселова, М., Высшая школа, 1988, стр.76-78; МШУ 7 - см. "Микроэлектронные устройства СВЧ" под ред. Г.Н.Веселова, М., Высшая школа, 1988, стр.173, 201, 225; сумматор 8 - например, по схеме сложения на направленных ответвлениях, см. "Микроэлектронные устройства СВЧ" под ред. Г.Н.Веселова, М., Высшая школа, 1988, стр.73-75; автогенераторы 5 и 12 - на микрополосковых генераторах с диодом Ганна, см. "Микроэлектронные устройства СВЧ" под ред. Г.Н.Веселова, М., Высшая школа, 1988, стр.158-160; приемник 10 - это обычный приемник РЛС, обеспечивающий высокую когерентность сигналов с синхронным детектором, см. "Теоретические основы радиолокации" под ред. В.Е.Дулевича, М., Сов. Радио, 1978, стр.79-81; ЖКИ 11 - фирмы POWERTYPPG-12864A 128×64 точки с подсветкой, см. Aktiv-Matrix-LCD's LDE052T-12 320×40 5,1 N 46029, TECHNISCHER KATALOG 96/97 г., фирмы Setron, стр. 466 38032, Brauschweig, Germany; MK13 - это, например, микропроцессор фирмы Jntel 80С 188 ЕС-16, см Каталог "Сектор электронных компонентов. Россия-99", М., ДОДЕКА, 1999, стр. 487, сумматор 8 - на операционном усилителе, например 140 У Д17.
Радиолокатор работает следующим образом, рассмотрим на примере первой подрешетки, т.к. вторая работает полностью идентично. Микроконтроллер 13 определяет все временные соотношения работы радиолокатора в целом и его частей между собой. Подается сигнал на запуск второго автогенератора 12, вырабатывающего запускающий импульс общей фазы, по которому запускается первый автогенератор 5, вырабатывающий частоту заполнения запускающего радиоимпульса. Одновременно по второй шине управления ферритовый циркулятор 6 переключается в режим "передача" и радиоимпульс по второй шине вход/выход поступает на фазовый коммутатор 4, который назначает фазу передающего зондирующего радиоимпульса радиолокатора в соответствии с кодом, поступающим по первой шине управления, начиная с нулевой фазы и далее через 22,5° по всем 3-N излучателям блока управления диаграммой направленности в горизонтальной плоскости, в которой работает первая подрешетка 1. После каждого передающего радиоимпульса фазовый коммутатор 4 и ферритовый циркулятор 6 переключаются на "прием" и отраженные от цели импульсы (в силу принципа обратимости) поступают на МШУ 7, затем суммируются с отраженными импульсами второй подрешетки 2, полученный суммарный импульс обрабатывается в приемнике 10 и поступает на ЖКИ 11, где высвечивается в виде яркостной отметки (одной или нескольких). Следует заметить, что в ЖКИ 11 применена растровая развертка, т.е. нет режима сопровождения цели (целей), а только обнаружение с указанием дальности до цели (целей) и взаимной скорости сближения (удаления) и при малом расстоянии до цели и высокой скорости сближения МК 13 выдает сигнал тревожной сигнализации на блок 9 (световой и/или звуковой), привлекая тем самым внимание пилота. Цифровые данные цели (целей), которые высвечиваются на ЖКИ 11: угол места, угол азимута, дальность и скорость сближения определяются МК 13 (современные ЖКИ для удобства отображения информации выпускаются со встроенным МК).
Антенная система состоит из двух подрешеток: одна в горизонтальной плоскости, другая - в вертикальной, а излучатели выполнены в виде отрезков печатных проводников, размерами, определяемыми длиной волны, обычно λ=3-10 см.
В данной заявке найден один из оптимальных вариантов антенной системы с учетом имеющихся возможностей ее размещения и условий работы всего радиолокатора. Оптимизация состоит в приближении значений реализуемых характеристик к предельно допустимым, найденным для выбранных критериев оптимальности, такими как максимальный коэффициент усиления антенных подрешеток в секторе сканирования.
На фиг.2 показан пример размещения антенных подрешеток в носовой части фюзеляжа, на фиг.3 - в крыле, собственно управляюще-вычислительный блок 14 выполнен в виде отдельного конструктива (блока) за приборной панелью ближе к антенным подрешеткам, ЖКИ 11 непосредственно на приборной панели.
Примерные данные предлагаемого радиолокатора следующие (при λ=3 см): каждая подрешетка имеет площадь ≈800 см2 (длина и ширина варьируются, глубина порядка 15 см, общий вес радиолокатора не более 1,5-2 кг, дальность радиолокатора 12-15 км, мощность в импульсе менее 100 Вт, τ имп=100 мкс (с перестройкой по времени), частота повторения 10 кГц, ширина ДН каждого излучателя ≈45°, общая ДН игольчатая не менее 5° по вертикали и горизонтали, число излучателей в каждой подрешетке (при приведенных данных) равно 9, сложение мощностей излучателей - пространственное.
Построение конструктива по предложенному способу, т.е. совмещение по месту каждой антенной подрешетки со своим блоком управления на микрополосковых линиях позволяет рассосредоточить ФАР, что проводит к значительному снижению ГМХ при вполне удовлетворительных технических характеристиках. Данный конструктив радиолокатора позволяет оснастить ими большинство самолетов малой авиации, что значительно повысит безопасность полетов. Предлагаемый радиолокатор позволяет дополнительно отслеживать радиорельеф местности (суша/вода) и обнаруживать грозовые фронты, что еще более увеличивает комфортность управления.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАТОР ДЛЯ ЛЕГКОМОТОРНОГО САМОЛЕТА | 2009 |
|
RU2390795C1 |
| ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР | 2002 |
|
RU2234714C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РАДИОЛОКАТОР | 2004 |
|
RU2280264C2 |
| КОРОТКОИМПУЛЬСНЫЙ РАДИОЛОКАТОР С ЭЛЕКТРОННЫМ СКАНИРОВАНИЕМ В ДВУХ ПЛОСКОСТЯХ И С ВЫСОКОТОЧНЫМ ИЗМЕРЕНИЕМ КООРДИНАТ И СКОРОСТИ ОБЪЕКТОВ | 2014 |
|
RU2546999C1 |
| Способ построения активной фазированной антенной решетки | 2019 |
|
RU2717258C1 |
| Способ построения активной фазированной антенной решётки | 2019 |
|
RU2697194C1 |
| Способ построения активной фазированной антенной решетки | 2020 |
|
RU2730120C1 |
| Двухдиапазонная приемо-передающая активная фазированная антенная решетка | 2018 |
|
RU2688836C1 |
| САМОЛЕТНАЯ МНОГОДИАПАЗОННАЯ АФАР С УПРАВЛЯЕМЫМ ЛУЧОМ НА ИЗЛУЧЕНИИ И МНОГОЛУЧЕВЫМ ПРИЕМОМ СИГНАЛА | 2013 |
|
RU2568413C2 |
| ПРИЕМО-ПЕРЕДАЮЩАЯ АКТИВНАЯ ФАЗИРОВАННАЯ АНТЕННАЯ РЕШЕТКА | 2014 |
|
RU2583336C1 |

Изобретение относится к радиотехнике, в частности к радиолокации, и может быть использовано для обзора передней полусферы (нижней и верхней) в легких маневренных самолетах и вертолетах, для предупреждения столкновений с другими летательными аппаратами, высоковольтными линиями электропередач, вышками, трубами и т.д. Технический результат заключается в повышении безопасности полета лекгомоторного самолета. Радиолокатор схемно и конструктивно выполнен в виде трех частей: антенны, состоящей из первой и второй фазированных антенных подрешеток и управляющего вычислительного блока, в каждую из указанных подрешеток входит: N излучателей, фазовый коммутатор, ферритовый циркулятор, первый автогенератор и малошумящий усилитель (МШУ), а в управляющий вычислительный блок входит: сумматор, приемник, микроконтроллер, второй автогенератор, индикатор на жидкокристаллическом дисплее (ЖКИ) и блок тревожной сигнализации. 4 з.п. ф-лы, 4 ил.
| Способ приготовления консистентных мазей | 1924 |
|
SU8800A1 |
| СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ | 1996 |
|
RU2134911C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЙ ЛЕТАТЕЛЬНОГО АППАРАТА С ПРЕПЯТСТВИЯМИ | 1999 |
|
RU2150752C1 |
| US 5657024 A, 12.08.1997 | |||
| US 5874917 A, 23.02.1999. | |||

