Изобретение относится к радиотехнике, точнее к радиолокации, и может быть использовано при разработке систем радиозондирования атмосферы (CP), построенных на основе применения радиолокационного метода и использования сигналов спутниковых навигационных радиоэлектронных систем (СНРС) ГЛОНАСС/GPS для определения пространственных координат аэрологических радиозондов (АРЗ), передачи координатной и телеметрической информации на наземную базовую станцию (БС).
Общей проблемой производства и эксплуатации CP атмосферы является создание высокоточных систем определения координат АРЗ запускаемых в свободную атмосферу с помощью наполненных легким газом шаров-пилотов и надежную передачу телеметрической информации на наземную станцию в оперативном радиусе действия СР.
Известна система GPS-слежения (патент США №5379224). Система слежения, использующая спутники глобальной системы позиционирования (GPS), пригодна для применения в прикладных задачах, в которых задействованы радиозонды, радиогидроакустические буйки и другие подвижные объекты. Система слежения включает в себя датчик, установленный на каждом объекте, который в оцифровывает сигналы GPS-спутников, и записывает их в буфер данных. Затем эти цифровые выборки передаются, с меньшей скоростью, чем эти сигналы GPS-спутников были оцифрованы, по телеметрическому каналу связи, чередуясь с другими телеметрическими данными объекта. Эти данные GPS обрабатываются вычислительной рабочей станцией, которая вычисляет координаты и скорость датчика на момент выборки (оцифровки) сигнала. Буфер данных датчика периодически обновляется, а на рабочей станции периодически пересчитываются координаты и скорость датчика. Кроме этого рабочая станция вычисляет дифференциальные поправки, чтобы помочь обнаружить сигналы и повысить точности определения координат.
Недостатки известного решения: большая загруженность радиоканала телеметрии, поэтому более широкий спектр передаваемого сигнала (потери в дальности или увеличение мощности передатчика); прерывистость обработки сигналов GPS, что усложняет функционирование следящих контуров и фильтров.
Известен GPS-зонд не обрабатывающий кодовый сигнал, а ретранслирующий его на наземный приемник (патент США №4754283).
Это прибор для измерения скорости ветра, приемник которого обрабатывает сигналы спутниковой навигационной системы GPS без использования широкополосных кодов. Этот прибор интегрирует двухфазных код и выделяет только несущие частоты сигналов всех «видимых» приемной антенной спутников. Используются два таких приемника. Один приемник располагается на земле, в месте, с известными координатами (широта и долгота). Другой приемник размещается на баллонном аэрологическом радиозонде и запускается в атмосферу. Передатчик телеметрии на борту зонда, связанный с GPS-системой, передает сигнал, содержащий информацию о несущих частотах спутников GPS, на приемник сигналов телеметрии расположенный на земле.
Сигналы с выхода приемника телеметрии и локального, не обрабатывающего кодовой сигнал GPS-приемника поступают на группу следящих фильтров. Отфильтрованные сигналы оцениваются для измерения разницы между несущими частотами локального GPS-приемников и частотами GPS-приемника зонда, вызванной скоростью перемещения зонда относительно базового приемника, то есть здесь наблюдается доплеровский эффект. Скорость ветра вычисляется исходя из измеренных доплеровских смещений GPS-приемника зонда и известных координат спутников GPS. Скорость зонда вычисляется в виде трехкоординатного пространственного вектора. Этот вектор может быть интегрирован, для получения координат X, У и высоты Z от точки запуска зонда.
Недостатки известного решения: сложный и менее точный способ вычисления координат радиозонда, а также отсутствие приема и обработки метеовеличин.
Известен метод и аппаратура для слежения за местоположением и скоростью приборов, находящихся в воздухе (патент США №5347285).
Определяется метод и система слежения, по крайней мере, за одним движущимся объектом, таким, как находящийся в воздухе метеорологический прибор, с расположенной на земле станции слежения путем перехвата широкополосных сигналов, передаваемых созвездием спутников, в которых кодовая последовательность неизвестна. Метод и система включают в себя схему приемника на движущимся объекте, которая сжимает широкополосные сигналы в узкополосный сигнал, удаляет все частотные сдвиги с помощью эталонным генератора со смещенной частотой, формирует узкополосный аналоговый модулирующий сигнал и передает его на базовую станцию, в которой выполняется перевод сигнала в спектральную область и полученные спектральные составляющие сравниваются с синтезированными спектральными величинами, чтобы идентифицировать каждый спутник, оценивается смещение частоты эталонного генератора, а также определяются координаты и скорость движущегося объекта. Недостатки известного решения: сложный и менее точный способ вычисления координат радиозонда.
Известен отдаленный GPS-датчик и обрабатывающая система для удаленного GPS-зондирования и централизованная обработка на наземной станции для удаленного мобильного определения местоположения и скорости (патент США №S420592).
Пример осуществления данного изобретения - система радиозондирования, включающая в себя цифровой буфер снимка сигналов GPS и последовательный коммуникационный контроллер для передачи кадров сообщения, формируемых метеорологических данных, полученных устройством измерения влажности, температуры и давления. Кадры сообщения передаются со сравнительно низкой скоростью по метеорологическую радиоканалу на наземную станцию. Вся традиционная цифровая обработка GPS - сигналов главным образом выполняется на наземной станции, включая восстановление несущей частоты, захват псведослучайного шумового кода, выделение псевдодальностей, выделение эфемеридной информации, сбор альманаха, выбор спутников, вычисление навигационного решения и дифференциальных поправок. Кроме того, наземная обработка включает в себя фильтрацию Калмана вычисления скорости ветра. Недостатки известного решения:
- большая загруженность радиоканала телеметрии, поэтому более широкий спектр передаваемого сигнала (потери в дальности или увеличение мощности передатчика радиозонда.
- прерывистость обработки сигналов GPS, что усложняет функционирование следящих контуров и фильтров.
Известен «Цифровой радиозонд с использованием сигналов GPS/ГОНАСС, см. патент на ПМ РФ №125727, который содержит три канала измерения метеовеличин: температуры, влажности и давления, выходы которых соединены с микроконтроллером, который преобразует их в цифровую форму и с помощью СВЧ передатчика передает эти данные по телеметрии на приемник базовой наземной станции, который принимает телеинформацию с АРЗ.
При всех своих достоинствах этот радиозонд (метод измерения его параметров) обладает следующими недостатками: это довольно сложная система с большими габаритно-массовыми характеристиками (ГМХ), также он не позволяет измерять турбулентность атмосферы.
Известен «Многорежимный аэрологический комплекс», патент РФ №2710965 от 15.04.2019 г. Комплекс может работать в стандартном радиолокационном режиме измерения координат АРЗ снабженным сверхрегенеративным приемопередатчиком в диапазоне 1670±10МГц, в радиопеленгационном режиме измерения координат АРЗ снабженным датчиком давления и в радионавигационном режиме измерения координат АРЗ снабженным приемником сигналов ГЛОНАСС/GPS и передатчиком, работающим в диапазонах 401- 406МГц или 1670±10МГц. В канале связи CP для передачи телеметрической информации используется частотная модуляция поднесущей или несущей частоты передатчика АРЗ. Эта CP выбрана в качестве ПРОТОТИПА.
Недостатком этого решения следует считать повышенную ширину полосы частоты пропускания канала связи из-за применения частотной модуляции телеметрическим сигналом, возможные срывы автосопровождения радиозонда по угловым координатам из-за узкой диаграммы направленности РЛС при запуске радиозонда и в ближней зоне.
Недостатком известных CP и ПРОТОТИПА является снижение потенциала CP из-за повышенной ширины полосы частоты пропускания канала связи, возможные срывы автосопровождения радиозонда по угловым координатам из-за узкой диаграммы направленности РЛС при запуске АРЗ и в ближней зоне.
Технической задачей изобретения является повышения потенциала и расширение функциональных возможностей СР.
Технический результат достигается за счет развития структуры построения CP, а именно, применения универсальной базовой РЛС, за счет применения частотной и фазовой модуляции в функциональной схеме АРЗ, введения блоков частотного и фазового демодуляторов в приемном устройстве РЛС для обеспечения работы CP в радиолокационном, радиопеленгационном и радионавигационном режимах на одной несущей частоте 1680±МГц.
Для решения технической задачи предложена радиолокационно-навигационная система радиозондирования атмосферы, состоящая из двух основных частей: пространственной - А и наземной - Б, причем пространственная часть содержит сигналы созвездий СНРС ГЛОНАСС/GPS, метеорологические параметры атмосферы - МПА, навигационный и радиолокационный АРЗ, а наземная часть состоит из двухрежимной РЛС, в следующем составе: фазированная антенная решетка - ФАР с электромеханическим приводом - ЭМП, когерентный импульсный передатчик, циркулятор, блок управления приводом - БУП, аналоговый приемник СВЧ, блок обработки угловой информации - БОУИ, блок цифровой обработки сигналов - БЦОС промежуточной частоты - ПЧ, блок обработки ответного сигнала дальности - БООСД, блок обработки телеметрической информации радиолокационного - БОТИР АРЗ, блок цифрового управления - БЦУ РЛС, блок контроля функционирования - БКФ РЛС, блок обработки телеметрической информации навигационного - БОТИН АРЗ, автоматизированное рабочее место - АРМ оператора РЛС и блок ввода-вывода информации - БВВИ, причем обе части имеют следующие соединения: сигналы созвездий СНРС ГЛОНАСС/GPS связаны первым радиоканалом с навигационными АРЗ, которые вторым радиоканалом связаны с ФАР, радиолокационные АРЗ третьим радиоканалом связаны с ФАР; ФАР второй дуплексной шиной данных (ДШД) связана с входом/выходом ферритового циркулятора, а первой ДШД - с ЭМП ФАР; выход когерентного передатчика Рвых связан с входом циркулятора, выход которого Fпр соединен с входом аналогового приемника, который в свою очередь восьмой ДШД соединен непосредственно с блоком цифрового управления БЦУ РЛС, а девятой ДШД через блок цифровой обработки сигналов ПЧ и десятой ДШД также соединен с этим блоком, также с ним двенадцатой и тринадцатой ДШД соединены блоки БОТИР и БОТИН непосредственно, БОТИН семнадцатой ДШД соединен с АРМ, который четырнадцатой ДШД соединен с БЦУ РЛС, однонаправленная шина с его выхода соединена с ФАР; БЦУ РЛС седьмой ДШД соединен с блоком обработки угловой информации БОУИ, одинадцатой ДШД - с блоком обработки сигнала дальности БООСД, пятнадцатой ДШД - с БКФ, шестнадцатой ДШД - с блоком ввода-вывода информации БВВИ, также с которым восемнадцатой ДШД соединен АРМ; ЭМП ФАР четвертой ДШД соединен с блоком управления приводом БУП РЛС, который шестой ДШД соединен с блоком обработки угловой информации БОУИ; блок ввода-вывода информации БВВИ девятнадцатой ДШД связан с потребителем этой информации и является выходом комплекса;
радионавигационный АРЗ содержит следующие узлы и блоки: датчики метеорологических параметров атмосферы, антенну приема сигналов СНРС, приемник сигналов СНРС, генератор опорной частоты, микропроцессор - МП, синтезатор несущей частоты передатчика, блок ввода полетного задания, передатчик, частотный модулятор несущей частоты, модулятор фазы несущей частоты, полосовой фильтр несущей частоты, передающую антенну, со следующими соединениями: сигналы СНРС радиоканалом через приемную антенну АРЗ, затем через приемник соединены с третьим информационным входом МП, с первым информационным входом которого соединены выходы датчиков метеорологических параметров, а со вторым информационным входом соединен блок ввода полетного задания, выход генератора опорной частоты соединен с тактовым входом МП, также через синтезатор несущей частоты соединен с модулирующими входами частотного модулятора несущей частоты и модулятора фазы несущей частоты, первый управляющий выход МП соединен с частотным модулятором несущей частоты, второй управляющий выход МП соединен с модулятором фазы несущей частоты, а выходы обоих модуляторов соединены с передатчиком АРЗ, который двунаправленной шиной соединен с входом-выходом МП, а однонаправленной шиной через полосовой фильтр соединен с передающей антенной АРЗ.
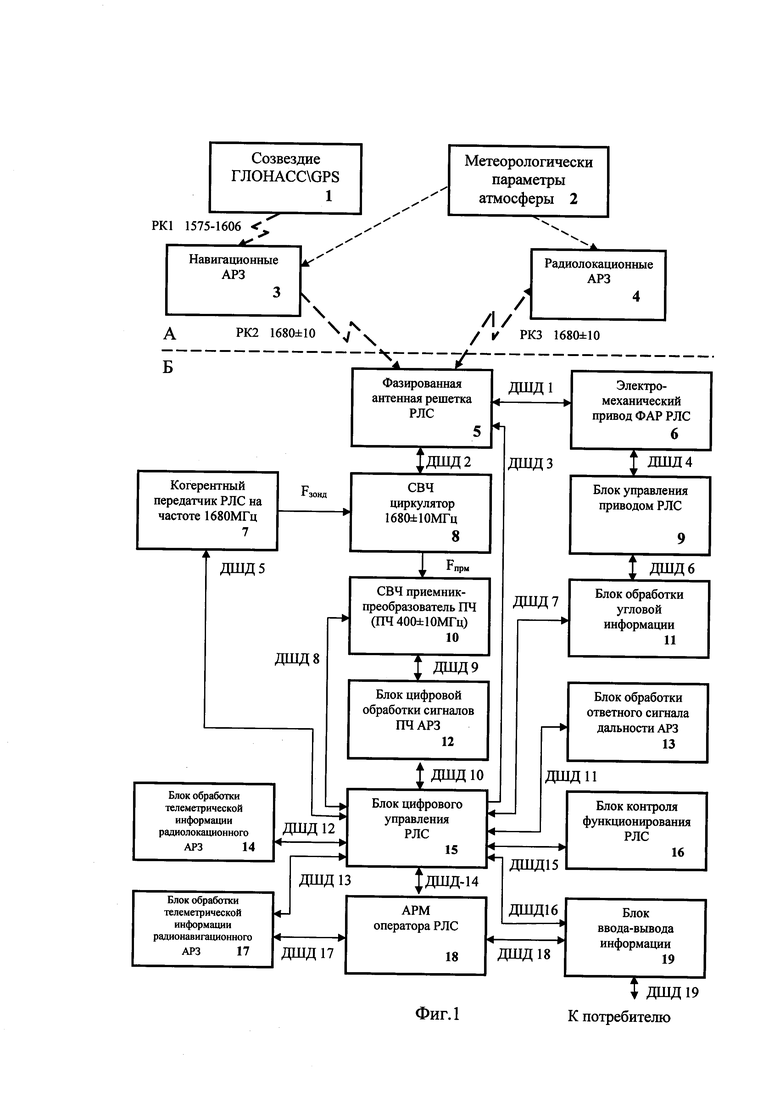
На фиг. 1 показана структурная схема РНСР атмосферы, на которой изображено: А пространственная часть системы, Б1 - наземная часть системы, 1 - созвездие спутниковых навигационных радиоэлектронных систем - СНРС ГЛОНАСС/GPS, 2 - метеорологические параметры атмосферы, 3 - навигационный АРЗ, 4 - радиолокационный АРЗ, 5 - фазированная антенная решетка (ФАР) РЛС, 6 - электромеханический привод (ЭМП) ФАР, 7 - импульсный передатчик РЛС, 8 - циркулятор, 9 - блок управления приводом антенны (БУП) РЛС, (10) - аналоговый приемник СВЧ, 11 - блок обработки угловой информации (БОУИ), 12 - блок цифровой обработки сигнала промежуточной частоты (БЦОС ПЧ), 13 - блок обработки ответного сигнала дальности (БООСД), 14 - блок обработки телеметрической информации радиолокационного (БОТИР) АРЗ, 15 - блок цифрового управления (БЦУ) РЛС, 16 - блок контроля функционирования (БКФ) РЛС, 17 - блок обработки телеметрической информации радионавигационного (БОТИН) АРЗ, 18 - автоматизированное рабочее место оператора (АРМ) РЛС, 19 - блок ввода-вывода информации (БВВИ), РК 1 - первый радиоканал (рабочий диапазон частот 1575-1606МГц), РК 2, РК 3, - второй, третий радиоканалы (рабочий диапазон частот 1680±10 МГц).
ДШД - дуплексные двунаправленные шины данных, ДШД 1-18.
Схема на фиг. 1 имеет следующие соединения: созвездия СНРС ГЛОНАСС/GPS 1 первым радиоканалом РК 1 связаны с навигационным АРЗ 3, который вторым радиоканалом РК 2 связан с ФАР 5, радиолокационный АРЗ 4 третьим радиоканалом РК 3 связаны с ФАР 5, метеорологические параметры атмосферы 2 через навигационный АРЗ 3 и радиолокационный АРЗ 4 также связаны с ФАР 5, которая второй ДШД связана с входом/выходом циркулятора 8, а первым ДШД - с ЭМП ФАР 6; выход Fзонд когерентного передатчика 7 связан с входом циркулятора 8, выход которого Fпр соединен с входом аналогового приемника 10, который в свою очередь восьмой ДШД соединен непосредственно с блоком цифрового управления (БЦУ) РЛС 15, а девятой ДШД через блок цифровой обработки сигналов ПЧ (БЦОС) 12 и десятой ДШД также соединен с этим блоком, также с ним двенадцатой и тринадцатой ДШД соединены блок обработки телеметрической информации радиолокационного (БОТИР) 14 и блок обработки телеметрической информации радионавигационного (БОТИН) 17 непосредственно, БОТИН 17 семнадцатой ДШД соединен с АРМ 18, который четырнадцатой ДШД соединен с БЦУ РЛС 15, однонаправленная шина с его выхода соединена с ФАР 5; БЦУ РЛС 15 седьмой ДШД соединен с блоком обработки угловой информации (БОУИ) 11, одинадцатой ДШД - с БООСД 13, пятнадцатой ДШД - с БКФ 16, шестнадцатой ДШД - с блоком ввода-вывода информации (БВВИ) 19, также с которым восемнадцатой ДШД соединен АРМ 18; ЭМП ФАР 6 четвертой ДШД соединен с блоком цифрового управления приводом (БУП) РЛС 9, который шестой ДШД соединен с блоком обработки угловой информации (БОУИ) 11; блок ввода-вывода информации (БВВИ) 19 девятнадцатой ДШД связан с потребителем этой информации и является выходом системы.
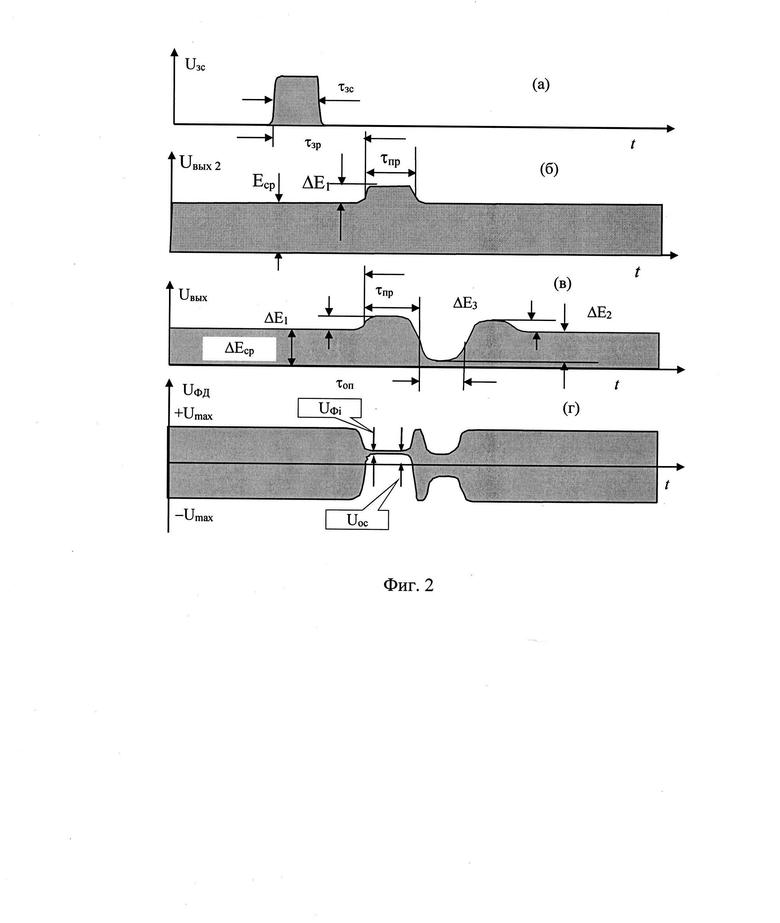
На фиг. 2 приведены осциллограммы ответного сигнала сверхрегенеративного приемопередатчика АРЗ по каналу дальности на выходе амплитудного и фазового детекторов приемного устройства РЛС в различных режимах работы, на которых приведены обозначения и названия следующих сигналов:
- (а) - огибающая запросных радиоимпульсов РЛС, Uзс;
- (б) - ответный сигнал СПП на выходе амплитудного детектора РЛС в режиме «ответной паузы», Uвых АД;
- (в) - ответный сигнал СПП на выходе фазового детектора когерентной РЛС, UФД;
- (г) - ответный сигнал СПП на выходе амплитудного детектора в режиме «первичной реакции», Uвых 2.
-Еср - средняя энергия радиоимпульсов СПП на выходе приемного устройства РЛС;
- ΔE1 - энергия первичной реакции радиоимпульсов СПП;
- ΔЕ2 - энергия вторичной реакции радиоимпульсов СП;,
- ΔЕ3 - энергия третичной реакции радиоимпульсов СПП;
- ΔЕос - энергия ответного сигнала СПП;
- Umax - максимальна амплитуда сигнала на выходе ФД;
- UФi - амплитуда шумов ФД в течение ответного сигнала;
- Uoc - мгновенное значение доплеровского сигнала на выходе ФД;
- τзс - длительность радиоимпульса запросного сигнала РЛС;
- τзр - длительность задержки ответных радиоимпульсов СПП относительно запросных радиоимпульсов РЛС;
- τпр - длительность приемного интервала СПП;
- τоп - длительность ответного сигнала в виде «паузы».
Для описания работы РНСР приводятся основные технические характеристики когерентной аэрологической РЛС:
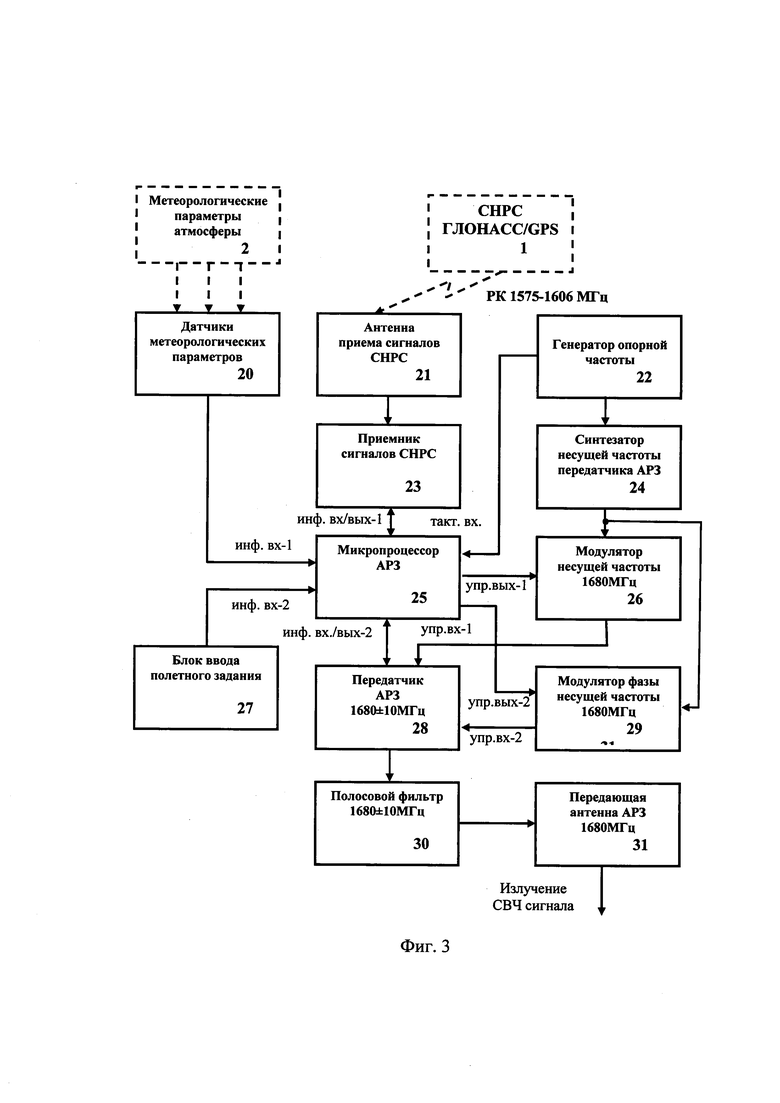
На Фиг. 3 приведена структурная схема навигационного АРЗ на которой изображено: 20 - датчики метеорологических параметров атмосферы, 21 - антенна приема сигналов СНРС, 22 - генератор опорной частоты, 23 - приемник сигналов СНРС, 24 - синтезатор несущей частоты передатчика, 25 - микропроцессор - МП, 26 - модулятор несущей частоты, 27 - блок ввода полетного задания, 28 - передатчик АРЗ, 29 - модулятор фазы несущей частоты, 30 - полосовой фильтр несущей частоты, 31 - передающая антенна АРЗ.
Схема на фиг. 3 имеет следующие соединения: сигналы СНРС 1 радиоканалом через приемную антенну АРЗ 21, затем через приемник сигналов СНРС 23 двунаправленной шиной соединены с первым информационным входом/выходом МП 25, с первым информационным входом МП 25 которого соединены выходы датчиков метеорологических параметров 20, а со вторым информационным входом МП 25 соединен выход блок ввода полетного задания 27, выход генератора опорной частоты 22 соединен с тактовым входом МП 25, также через синтезатор несущей частоты 24 соединен с модулирующими входами модулятора несущей частоты 26 и модулятора фазы несущей частоты 29, первый управляющий выход МП 25 соединен с входом модулятора несущей частоты 26, второй управляющий выход МП 25 соединен с входом модулятора фазы несущей частоты 29, а выходы обоих модуляторов соединены с первым и вторым управляющими входами передатчика АРЗ 28, который двунаправленной шиной соединен со вторым информационным входом-выходом МП 25, а однонаправленной шиной через полосовой фильтр 30 соединен с передающей антенной АРЗ 31.
РНСР может работать в следующих режимах.
В первом режиме работы РЛС осуществляет зондирование атмосферы при работе с штатными радиолокационными радиозондами АРЗ 4 типа МР3-3, МР3-ЗМК снабженными сверхрегенеративными приемопередатчиками-ответчиками (СПП) работающими в диапазоне частот 1670-1690 МГц. Координаты АРЗ определяется путем измерения его угловых координат методом равносигнальной зоны и определения наклонной дальности путем излучения передатчиком РЛС 7 запросного сигнала Uзс (см. фиг. 2, а). СПП АРЗ 4 формирует ответный сигнал по дальности в виде «первичной реакции» (см. фиг. 2, б) или «ответной паузы» (см. фиг. 2, г). В когерентном режиме работы РЛС ответный сигнал СПП на выходе ФД позволяет дополнительно определить мгновенную скорость движение АРЗ за счет эффекта Доплера (см. фиг. 2, г). Автосопровождение ответного сигнала по дальности и измерение угловых координат АРЗ обеспечивает непрерывное определение его пространственных координат. СПП АРЗ 4 передает пакетную телеметрическую информацию по радиоканалу РКЗ 1680±10МГц, которая через блоки 5, 8, 10, 12 и 15 поступает в блоки 11, 13, 17, в которых происходит обработка координатно-телеметрической информации, осуществляется расшифровка принятых информационных пакетов АРЗ 4. Это обеспечивает непрерывное автосопровождение АРЗ по пространственным координатам, построение профиля метеорологических параметров и ее вывод потребителю [1-3].
Во втором, радиопеленгационном режиме передатчик РЛС не используется. РЛС осуществляет зондирование атмосферы при работе с штатными радиозондами АРЗ 4 типа МР3-3, снабженными дополнительно датчиками давления для измерения высоты подъема радиозонда по барометрической формуле. РЛС состоит из блоков 7, 8, 9, 10, 11, 13, 14, 16. Передатчик АРЗ 4 передает пакетную телеметрическую информацию по радиоканалу РКЗ 1680±10 МГц, которая через блоки 5, 8, 10, 12 и 15 поступает в блоки 11, 13, 17, в которых происходит обработка координатно-телеметрической информации, осуществляется расшифровка принятых информационных пакетов АРЗ 4. Блок цифрового управления 15 взаимодействует блоками 9, 11, 13, осуществляет расшифровку принятых информационных пакетов АРЗ 4, обеспечивает непрерывное автосопровождение АРЗ по пространственным координатам, построение профиля метеорологических параметров и ее вывод потребителю [1-3].
Третий режим CP предусматривает работу РЛС с навигационными радиозондами АРЗ 3. Передатчик РЛС не используется. В этом режиме в работе РЛС участвуют блоки 7, 8, 9, 10, 11, 13, 16, 17. РЛС работает во взаимодействии с навигационными радиозондами АРЗ 3 снабженными приемниками навигационных сигналов СНРС ГЛОНАСС/GPS 1 поступающих по радиоканалу РК 1 1575-1610 МГц в антенну 21 и приемное устройство 23 АРЗ 3 (см. фиг. 3). Навигационный аэрологический радиозонд АРЗ 3 снабжен передатчиком, работающим на частоте радиоканала РК 2 1680±10 МГц. АРЗ 3 передает в виде пакета на РЛС измеренные координаты своего положения в пространстве и метеорологические параметры атмосферы. РЛС работает только в режиме приема сигналов навигационного АРЗ 3. Блок цифрового управления 15 РЛС взаимодействует блоками 9, 11, 13, 14 осуществляет расшифровку принятых информационных пакетов АРЗ 3, вычисляет координаты АРЗ 3, наводит антенну 5 на АРЗ 3, чем обеспечивает непрерывное автосопровождение АРЗ по пространственным координатам, осуществляет построение профиля метеорологических параметров по данным блока 17 и ее вывод потребителю [1-3].
Назначения блоков и узлов РЛС:
- ФАР 5 обеспечивает излучение запросных радиоимпульсов когерентного передатчика 7 для измерения импульсным методом наклонной дальности до АРЗ, снабженных сверхрегенеративным приемопередатчиком и прием сигналов АРЗ всех типов. Автосопровождение АРЗ по углам осуществляется методом «равносигнальной зон»;
- Когерентный передатчик 7 обеспечивает излучение запросных и зондирующих радиоимпульсов, совместно с блоками БЦОС 12 и БАФОСД 13 обеспечивает когерентный режим обработки принимаемых сигналов;
- ЭМП 6 обеспечивает поворот ФАР в угломестной и азимутальной плоскостях по командам БЦУ 15;
Циркулятор 8 осуществляет распределение мощности радиоимпульсов когерентного передатчика 7 на вход ФАР 5 и принимаемых сигналов ФАР 5 на вход аналогового приемника 10;
- Аналоговый СВЧ приемник 10 осуществляет прием сигналов АРЗ, их усиление, фильтрацию, перенос спектра сигнала на промежуточную частоту в полосе 400±10 МГц;
- БЦОС 12 содержит эталонный высокостабильный задающий генератор, осуществляет преобразование аналогового сигнала АРЗ на промежуточной частоте 400±10 МГц в цифровой код и цифровую фильтрацию принятых координатно-телеметрических сигналов в виде цифрового пакета с тактовой частотой 2,5 кГц. Ширина полосы пропускания цифрового фильтра при приеме радиолокационного АРЗ составляет 2,0-4,0 МГц. В радиолокационном режиме цифровой демодулятор пакетного телеметрического сигнала работает в режиме частотной демодуляции поднесущей (суперирующей) частоты СПП (800±15 кГц) с частотой девиации ΔFпрм=±15 кГц.
В радионавигационном режиме ширина полосы пропускания цифрового фильтра при приеме сигнала радионавигационного АРЗ составляет Δfпрм=0,05 МГц. Цифровой демодулятор координатно-телеметрического сигнала работает в режиме фазовой бинарной демодуляции с фазовой манипуляции Δϕпрм=(0, π) несущей частоты 1680±10 МГц преобразованной на ПЧ.
- БЦУ 15 распределяет информацию в цифровом виде по всем функциональным блокам РЛС в соответствии с командами АРМ оператора РЛС 18.
- БОУИ 11 определяет методом «равносигнальной зоны» направление пеленга на АРЗ, обеспечивает автоматическое сопровождение радиолокационного радиозонда по угловым координатам в азимутальной (β) и угломестной (ε) плоскостям. В режиме работы с радионавигационным АРЗ слежение по углам осуществляется по командам БЦУ после приема и обработки информации пространственного положения АРЗ по сигналам СНРС;
- БЦУП 9 вырабатывает цифровой код управления двигателями ЭМП 6;
- БКФ 16 осуществляет контроль функционирования РЛС по командам БЦУ 15 при включении РЛС.
- БОТИР 14 производит обработку телеметрической информации, получаемой от радиолокационного АРЗ Цифровой демодулятор пакетного телеметрического сигнала работает в режиме частотной демодуляции поднесущей частоты СПП (800±15 кГц) с частотой девиации ΔFпрм=±15 кГц;
- БОТИН 17 производит обработку координатной и метеорологической информации, получаемой от радионавигационного АРЗ. Координатная информация используется для наведения ФАР на АРЗ;
- АРМ оператора РЛС 18 позволяет управлять РЛС во всех режимах работ;
- УВВИ 19 обеспечивает ввод исходных данных необходимых для начала зондирования атмосферы и вывод потребителю полученной метеорологической информации в стандартном виде.
РНСР обеспечивает зондирование атмосферы с помощью радиолокационных и радионавигационных АРЗ запускаемых в атмосферу на шарах-баллонах.
Структура радиолокационного АРЗ со сверхрегенеративным приемопередатчиком-ответчиком и принцип его работы в материалах данной заявки не рассматривается, т.к. в патенте РФ №2626410 дано его подробное описание.
Необходимо пояснить принцип работы радионавигационного АРЗ. Его структурная схема приведена на Фиг. 3 на которой изображены: датчики метеорологических параметров атмосферы (МПА) 20, антенна приема навигационных сигналов 21, генератор опорной частоты 22, приемник навигационных сигналов 23, синтезатор несущей частоты передатчика АРЗ 24, микропроцессор АРЗ 25, частотный модулятор несущей частоты в диапазоне 1680±10 МГц. 26, блок ввода полетного задания 27, передатчик АРЗ 28, фазовый модулятор несущей частоты 1680 МГц 29, полосовой фильтр несущей частоты 1680 МГц 30, передающая антенна АРЗ 31.
На Фиг. 3 также изображены метеорологические параметры атмосферы МПА 2 и спутниковые навигационные радиоэлектронные системы СНРС 1.
Назначения узлов и блоков навигационного АРЗ:
- Датчики МПА 20 обеспечивают преобразование измеряемых параметров атмосферы (температуру, влажность, давление, радиацию и т.п.) в электрический сигнал;
- антенна приема навигационных сигналов 21 обеспечивает преобразование электромагнитного поля (ЭМП), излучаемого спутниками СНРС в электрический СВЧ сигнал;
- генератор опорной частоты 22 вырабатывает сигнал стабильный по частоте для работы микропроцессора (МП) и формирования несущей частоты передатчика АРЗ;
- приемник навигационных сигналов АРЗ 23 осуществляет обработку сигналов СВЧ в цифровой код, содержащий координатную информацию о пространственном положении АРЗ;
- Синтезатор несущей частоты передатчика 24 вырабатывает гармонический сигнал на частоте в диапазоне 1680±10 МГц;
- Микропроцессор 25 осуществляет управление работой всех узлов АРЗ, выполняет обработку информации датчиков МПА 20, координатной информации, преобразует в цифровой пакетный формат.
- В радиолокационном режиме работы частотный модулятор несущей частоты 26 обеспечивает модуляцию частоты цифровым пакетом;
- Блок ввода полетного задания 27 обеспечивает запись в микропроцессор 25 приземных метеорологических параметров и режим работы АРЗ;
- Передатчик АРЗ 28 обеспечивает усиление сигнала синтезатора несущей частоты 24 модулированного цифровым пакетом в режиме частотной или фазовой модуляции;
- Полосовой фильтр несущей частоты 30 осуществляет фильтрацию внеполосного излучения передатчика 28 для исключения влияния на прием сигналов СНРС;
- Передающая антенна 31 обеспечивает излучение СВЧ сигнала в направлении наземной РЛС.
Предложенная РНСР работает в следующих режимах:
- в штатном радиолокационном режиме с серийными АРЗ снабженными радиолокационными сверхрегенеративными приемопередатчиками в диапазоне 1680±10 МГц;
- в штатном радиопеленгационном режиме с серийными АРЗ в диапазоне 1680±10 МГц снабженными датчиками давления;
- в радионавигационном режиме с навигационными АРЗ снабженными приемниками сигналов СНРС ГЛОНАСС/GPS и передатчиками, работающими в диапазоне 1680±10 МГц.
Таким образом, предлагаемое техническое решение позволяет существенно повысить тактико-технические и эксплуатационные характеристики отечественных CP:
- автосопровождение ответного сигнала радиолокационных АРЗ по дальности обеспечивается в режиме «первичной реакции», «ответной паузы», по доплеровскому сигналу СПП.
- автосопровождение сигнала АРЗ осуществляется в радионавигационном режиме без излучения запросного сигнала РЛС. При этом обеспечивается высокая точность определения текущих координат АРЗ (±15 м), направления и скорости ветра во всем оперативном радиусе действия CP, не менее 250 км.
- упрощается режим запуска навигационного АРЗ, поскольку в ближней зоне по дальности используется ФАР с широкой ДН (30 градусов) и исключается срыве автосопровождения по угловым координатам. Прием сигнала АРЗ в ближней зоне (до 1-3 км) обеспечивается также за счет боковых лепестков ДН РЛС, а координатная информация, передаваемая навигационным АРЗ, обеспечивает точное наведение антенны РЛС на АРЗ и автосопровождение по углам в течение всего полета АРЗ.
- для повышения ЭМС CP, мощность излучения передатчика радионавигационного АРЗ (3) в диапазоне 1680±10 МГц может быть снижена на 10-15 дБ (вплоть до 10 мВт) за счет использования запаса по усилению антенны РЛС (до 15 дБ). Важную роль для повышения помехоустойчивости играет дополнительная пространственная селекция сигнала навигационного АРЗ узконаправленной антенной РЛС.
- навигационный АРЗ снабжен передатчиком, работающем на несущей частоте существующих радиолокационных CP в диапазоне 1680±10МГц. Несущая частота передатчика АРЗ задается синтезатором с относительной точностью ±10-5 с узкополосной частотной или фазовой модуляцией несущей частоты и малым уровнем внеполосных излучений.
- пакетный режим работы навигационного АРЗ (см. патент РФ на полезную модель №63551. Госреестр ПМ РФ от 27.05.2007; патент РФ на полезную модель №106395. Госреестр ПМ РФ от 10.07.2011.), снижает влияние замираний сигнала АРЗ из-за его раскачивания, поскольку полный цикл приема метеорологической информации в цифровом виде происходит в течение короткого времени (1-2 секунды).
Литература
1. Киселев В.Н., Кузнецов А.Д. Методы зондирования окружающей среды (атмосферы). Учебник. - СПб, изд. РГГМУ, 2004, - 429 с.
2. Ермаков В.И., Кузенков А.Ф., Юрманов В.А. Системы зондирования атмосферы. Л.: Гидрометиздат, 1977. 304 с.
3. Зайцева Н.А. Аэрология - Гидрометеоиздат, 1990. 325 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОРЕЖИМНЫЙ АЭРОЛОГИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2710965C1 |
| НАВИГАЦИОННО-РАДИОЛОКАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2022 |
|
RU2805163C1 |
| Многофункциональная система радиозондирования атмосферы | 2016 |
|
RU2626410C1 |
| УНИФИЦИРОВАННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2576023C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ СИСТЕМА | 2011 |
|
RU2480791C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ С ФАЗОМОДУЛИРОВАННЫМ КАНАЛОМ ТЕЛЕМЕТРИИ | 2021 |
|
RU2787777C1 |
| НАВИГАЦИОННЫЙ АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД | 2022 |
|
RU2820052C2 |
| АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД С ПОВЫШЕННЫМИ ЭКСПЛУАТАЦИОННЫМИ ХАРАКТЕРИСТИКАМИ | 2021 |
|
RU2784448C1 |
| НАВИГАЦИОННЫЙ АЭРОЛОГИЧЕСКИЙ РАДИОЗОНД С ПЕРЕДАТЧИКОМ НА ПАВ-РЕЗОНАТОРЕ | 2022 |
|
RU2785585C1 |
| МАЛОГАБАРИТНАЯ НАВИГАЦИОННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2016 |
|
RU2613342C1 |
Изобретение предназначено для радиолокационного зондирования атмосферы в интересах метеорологии. Сущность: система состоит из пространственной (А) и наземной (Б) частей. Пространственная часть (А) состоит из спутниковых навигационных радиоэлектронных систем (СНРС) ГЛОНАСС/GPS (1), навигационных (3) и радиолокационных (4) аэрологических радиозондов (АРЗ). Наземная часть (Б) состоит из двухрежимной радиолокационной станции (РЛС), включающей фазированную антенную решетку (5) с электромеханическим приводом (6), когерентный импульсный передатчик (7), циркулятор (8), блок (9) управления приводом, аналоговый приемник (10) СВЧ, блок (11) обработки угловой информации, блок (12) цифровой обработки сигналов промежуточной частоты АРЗ, блок (13) обработки ответного сигнала дельности АРЗ, блок (14) обработки телеметрической информации радиолокационного АРЗ, блок (15) цифрового управления РЛС, блок (16) контроля функционирования РЛС, блок (17) обработки телеметрической информации навигационного АРЗ, автоматизированное рабочее место (18) оператора РЛС, блок (19) ввода-вывода информации. Технический результат: повышение потенциала и расширение функциональных возможностей систем радиозондирования атмосферы. 2 з.п. ф-лы, 3 ил.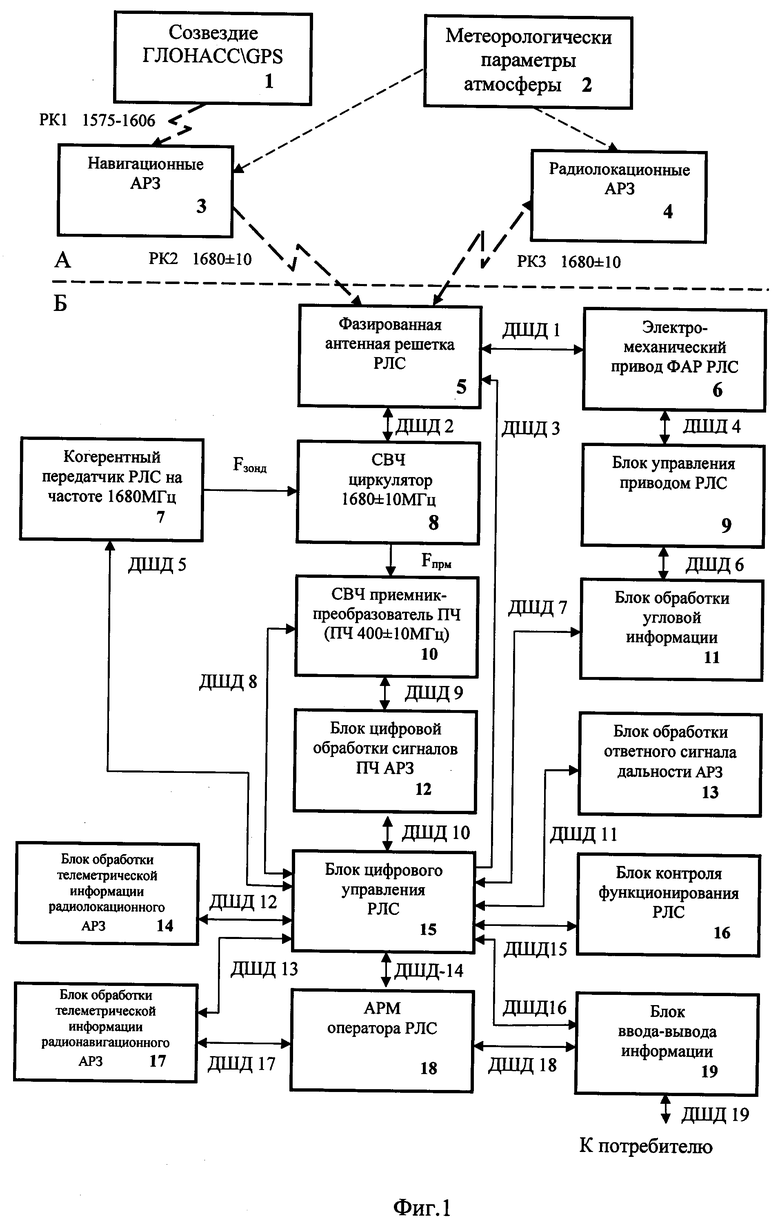
1. Радиолокационно-навигационная система радиозондирования атмосферы, состоящая из двух основных частей: пространственной (А) и наземной (Б), причем пространственная часть содержит спутниковые навигационные радиоэлектронные системы (СНРС) ГЛОНАСС/GPS, навигационные и радиолокационные аэрологические радозонды (АРЗ), а наземная часть состоит из двухрежимной РЛС в следующем составе: фазированная антенная решетка (ФАР) с электромеханическим приводом (ЭМП), когерентный импульсный передатчик, циркулятор, блок управления приводом (БУП), аналоговый приемник СВЧ, блок обработки угловой информации (БОУИ), блок цифровой обработки сигналов (БЦОС) промежуточной частоты (ПЧ), блок обработки ответного сигнала дальности (БООСД), блок обработки телеметрической информации радиолокационного АРЗ (БОТИР), блок цифрового управления РЛС (БЦУ), блок контроля функционирования РЛС (БКФ), блок обработки телеметрической информации навигационного АРЗ (БОТИН), АРМ оператора РЛС и блок ввода-вывода информации (БВВИ), причем обе части имеют следующие соединения: сигналы созвездий СНРС ГЛОНАСС/GPS связаны первым радиоканалом с навигационными АРЗ, которые вторым радиоканалом связаны с ФАР, радиолокационные АРЗ третьим радиоканалом связаны с ФАР; ФАР второй дуплексной шиной данных (ДШД) связана с входом/выходом ферритового циркулятора, а первой ДШД - с ЭМП ФАР; выход когерентного передатчика Рвых связан с входом циркулятора, выход которого Fпр соединен с входом аналогового приемника, который, в свою очередь, восьмой ДШД соединен непосредственно с блоком цифрового управления БЦУ РЛС, а девятой ДШД через блок цифровой обработки сигналов ПЧ и десятой ДШД также соединен с этим блоком, также с ним двенадцатой и тринадцатой ДШД соединены блоки БОТИР и БОТИН непосредственно, БОТИН семнадцатой ДШД соединен с АРМ, который четырнадцатой ДШД соединен с БЦУ РЛС, однонаправленная шина с его выхода соединена с ФАР; БЦУ РЛС седьмой ДШД соединен с блоком обработки угловой информации БОУИ, одиннадцатой ДШД - с блоком обработки сигнала дальности БООСД, пятнадцатой ДШД - с БКФ, шестнадцатой ДШД - с блоком ввода-вывода информации БВВИ, также с которым восемнадцатой ДШД соединен АРМ; ЭМП ФАР четвертой ДШД соединен с блоком управления приводом БУП РЛС, который шестой ДШД соединен с блоком обработки угловой информации БОУИ; блок ввода-вывода информации БВВИ девятнадцатой ДШД связан с потребителем этой информации и является выходом системы.
2. Система по п. 1, характеризующаяся тем, что радионавигационный АРЗ содержит следующие узлы и блоки: датчики метеорологических параметров атмосферы, антенну приема сигналов СНРС, приемник сигналов СНРС, генератор опорной частоты, микропроцессор (МП), синтезатор несущей частоты передатчика, блок ввода полетного задания, передатчик, частотный модулятор несущей частоты, модулятор фазы несущей частоты, полосовой фильтр несущей частоты, передающую антенну со следующими соединениями: сигналы СНРС радиоканалом через приемную антенну АРЗ, затем через приемник соединены с третьим информационным входом МП, с первым информационным входом которого соединены выходы датчиков метеорологических параметров, а со вторым информационным входом соединен блок ввода полетного задания, выход генератора опорной частоты соединен с тактовым входом МП, также через синтезатор несущей частоты соединен с модулирующими входами частотного модулятора несущей частоты и модулятора фазы несущей частоты, первый управляющий выход МП соединен с частотным модулятором несущей частоты, второй управляющий выход МП соединен с модулятором фазы несущей частоты, а выходы обоих модуляторов соединены с передатчиком АРЗ, который двунаправленной шиной соединен с входом-выходом МП, а однонаправленной шиной через полосовой фильтр соединен с передающей антенной АРЗ.
3. Система по п. 1, характеризующаяся тем, что схемно в реальном масштабе времени ФАР РЛС соединена только с одним из АРЗ: радиолокационным или радионавигационным.
| МНОГОРЕЖИМНЫЙ АЭРОЛОГИЧЕСКИЙ КОМПЛЕКС | 2019 |
|
RU2710965C1 |
| Многофункциональная система радиозондирования атмосферы | 2016 |
|
RU2626410C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА ЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2571870C1 |
| УНИФИЦИРОВАННАЯ СИСТЕМА РАДИОЗОНДИРОВАНИЯ АТМОСФЕРЫ | 2014 |
|
RU2576023C1 |

