Изобретение относится к области обучения, а именно обучения элементам двигательной пластики и двигательных навыков и умений.
Известно программированное обучение технике тяжелоатлетических упражнений - это обучение по оптимальной программе с оптимальным управлением процессом становления двигательных навыков и умений. Сначала шаг за шагом осваивается изучаемое движение. Далее переходят к целостному методу обучения с учетом контроля ведущих элементов в технике и с соблюдением строгой логической последовательности их выполнения [1].
Достоинство этого способа состоит в том, что использование программированного обучения приносит ощутимую пользу там, где удается разработать требуемые методы срочной информации о внутренней структуре осваиваемого движения.
Однако недостатком этого способа является то, что не всегда удается разработать эти методы, особенно в тех случаях, когда осваиваемое движение имеет сложную структуру и используется мелкая моторика мышц.
Наиболее близким решением, выбранным в качестве прототипа, является способ оперативной коррекции технического мастерства тяжелоатлетов с помощью ЭВМ [2], при использовании которого для коррекции техники выполнения тяжелоатлетических упражнений вычислительная машина получает информацию с периферийных датчиков, быстро обрабатывает и анализирует данные, выдает результаты анализа и запоминает их, причем до повторного выполнения упражнения (в режиме так называемого “реального времени”, т.е. когда всю необходимую информацию можно получить почти одновременно с завершением упражнения). Результаты анализа представляются как в цифровой, так и в графической форме на экране дисплея или в отпечатанном виде. Программа коррекции составляется с учетом результатов предварительных углубленных обследований каждого спортсмена.
Очевидным достоинством данного способа является получение необходимой информации почти одновременно с завершением упражнения, а также представление информации о многих параметрах: временные и ритмические характеристики движения, экстремумы динамических характеристик, результаты расчета производных показателей (градиентов силы, различных коэффициентов) и т.д.
Недостатком этого способа является следующее.
Во-первых, этот способ рассчитан в основном на исследование движений тяжелоатлета на тензоплатформе ПД-3, т.е. исследуется моторика тела спортсмена в целом с точки зрения силовых характеристик при подъеме штанги. Во-вторых, программа коррекции техники спортсмена составляется с учетом заданных уровней трех экстремумов усилий - опять же силовых характеристик. В-третьих, по этому способу занимающийся практически пассивно участвует в освоении движения - по указаниям тренера и специалиста-исследователя, а известно, что наилучших результатов достигают при личном заинтересованном участии и спортсмена. В-четвертых, здесь нет возможности исследования закономерностей мелкой моторики мышц, особенностей управления движением суставных сочленений, лучезапястного сустава кисти и верхних конечностей в целом, что необходимо как предпосылка для формирования двигательной пластики, а в некоторых случаях и для ее коррекции.
Целью предлагаемого изобретения является:
- расширение функциональных возможностей;
- исследование биомеханических закономерностей мелкой моторики мышц;
- выявление особенностей движения суставных сочленений, лучезапястного сустава кисти и верхних конечностей в целом;
- создание предпосылок для формирования двигательной пластики;
- коррекция двигательной пластики при наличии отклонений от правильного выполнения двигательных действий.
Поставленная цель достигается путем получения информации во время выполнения движения с помощью периферийных датчиков, быстрой обработки и анализа данных от этих датчиков средствами вычислительной техники в так называемом режиме “реального времени”, запоминания и выдачи результата анализа в цифровой или графической форме на экране дисплея или в отпечатанном виде, при этом согласно изобретению формируют требуемое двигательное действие как образцовое (эталонное), создают его математическую или электрическую модель, формализуют ее в виде математического программного обеспечения для микроЭВМ, и осваивающий (обучаемый) это двигательное действие осознает требуемую двигательную структуру, ассоциируя и соразмеряя ее с эталонным (образцовым) двигательным действием и, следовательно, с образцовым пространственным положением суставных сочленений, текущую информацию о котором получают с соответствующих периферийных датчиков, включает мышечные группы соответствующих суставных сочленений в активную работу, итерационно приближаясь к правильному выполнению двигательных действий, и закрепляет последние в процессе их повторений, оперативно контролируя правильность их выполнения.
Отличительными признаками заявляемого решения является следующее:
- во-первых, последовательность действий: формирование требуемого двигательного действия как образцового, создание его математической или электрической модели, формализация ее в виде программного обеспечения для микроЭВМ, осознание двигательной структуры, включение в активную работу мышечных групп и закрепление правильных двигательных действий повторением;
- во-вторых, осваивающий требуемое двигательное действие осознает требуемую двигательную структуру, т.е. выполняющий требуемое двигательное действие становится непосредственным заинтересованным участником формирования двигательной структуры;
- в-третьих, это осознание ассоциируется и соразмеряется занимающимся с эталонным (образцовым) двигательным действием и, следовательно, с образцовым пространственным положением суставных сочленений, текущую информацию о котором получают с соответствующих периферийных датчиков, обучаемому это необходимо прочувствовать непосредственно;
- в-четвертых, после осознания двигательной структуры обучаемый включает в активную работу мышечные группы суставных сочленений, участвующих в формировании двигательного действия, итерационно приближаясь к правильному выполнению этих двигательных действий;
- в-пятых, освоенный алгоритм двигательного действия он (обучаемый) закрепляет в процессе его многократного повторения, при котором оперативно контролируется правильность выполнения этого двигательного действия.
В заявленном способе отличительные признаки проявляют известные в других областях науки и техники свойства, а взятые в совокупности с признаками прототипа проявляют свойства, которые позволяют исследовать биомеханические закономерности мелкой моторики мышц, выявить особенности движения различных суставных сочленений, лучезапястного сустава кисти и верхних конечностей человека в целом, а также создать предпосылки для формирования двигательной пластики, что указывает на соответствие заявляемого решения критерию “существенные отличия”.
Предлагаемый способ поясняют чертежи.
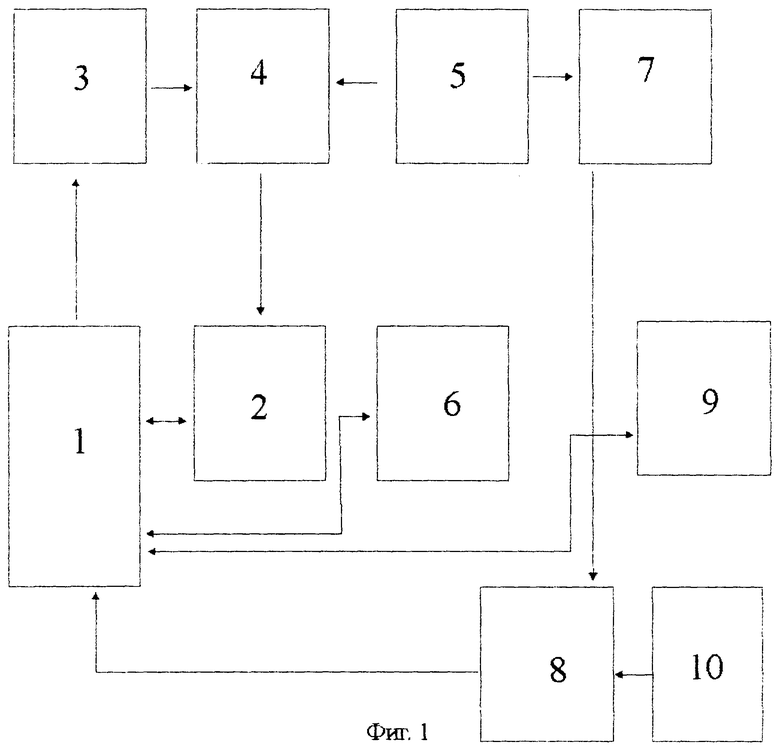
На фиг.1 изображена мнемосхема, поясняющая реализацию заявляемого способа и действия человека при формировании и коррекции двигательной пластики.
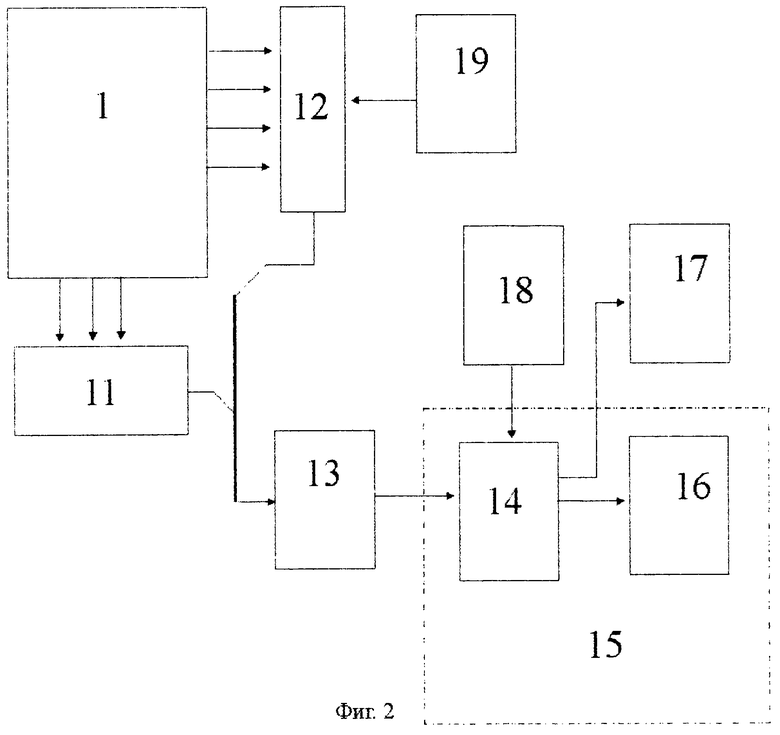
На фиг.2 представлена обобщенная блок-схема устройства, позволяющего реализовать заявляемый способ.
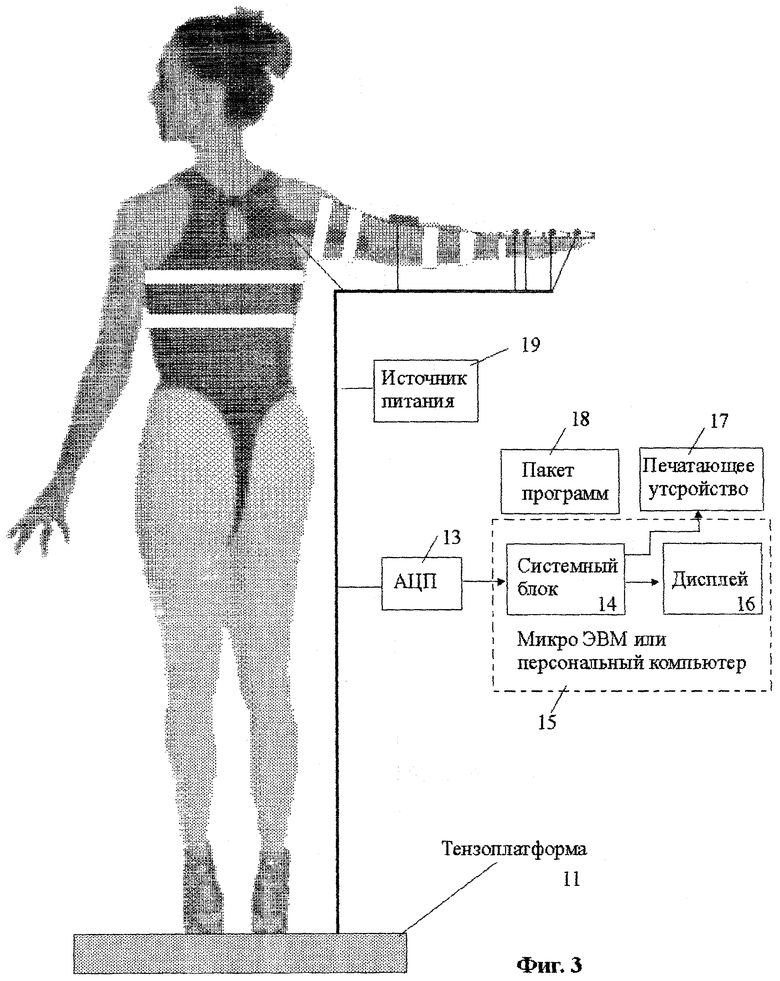
На фиг.3 изображено схематично установление периферийных датчиков на верхней конечности обучаемого и их подключение к средствам вычислительной техники, представленных в виде блок-схемы.
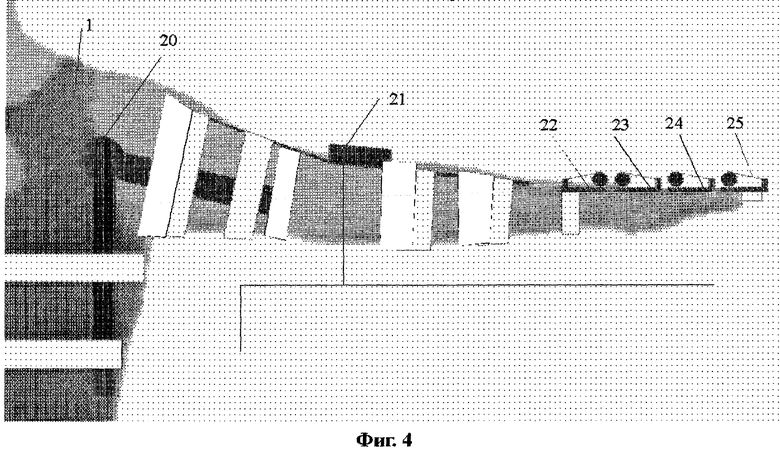
На фиг.4 изображена (укрупненно) установка электрогониометров на руке занимающегося.
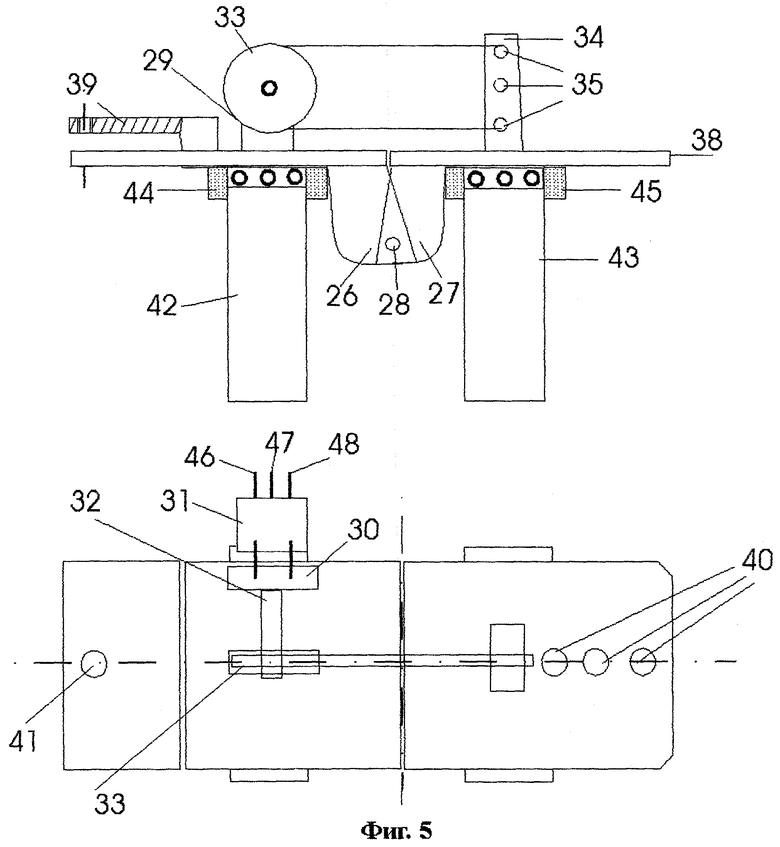
На фиг.5 приведен схематический чертеж конструкции одного из возможных миниатюрных электрогониометров.
На мнемосхеме, поясняющей сущность заявляемого способа и действия обучаемого (человека) (фиг.1), содержится: субъект обучения или коррекции двигательной пластики - человек 1, который сначала осознает двигательную структуру 2, что осуществляется посредством сбора и обработки информации 3 о положении суставных сочленений с периферийных датчиков, анализа статических положений 4, при котором устанавливаемое положение суставных сочленений и мышечных групп этих сочленений сравнивается с эталонным (образцовым) двигательным действием 5 и, соответственно, с требуемым пространственным положением этих суставных сочленений, затем он (человек) включает в активную работу 6 мышечные группы соответствующих суставных сочленений, анализирует текущее положение суставных сочленений, итерационно приближаясь к правильному выполнению двигательного действия, для чего осуществляется анализ динамических положений 7 суставных сочленений, при котором текущее пространственное положение соответствующих суставных сочленений сравнивается с эталонным или образцовым двигательным действием 5 и на основе результата анализа осуществляется формирование корректирующего воздействия 8, учитываемого человеком 1, и при достижении правильного выполнения двигательного действия человек 1 закрепляет это двигательное действие в процессе повторений 9, при этом правильность выполнения контролируется - блок 10, и при необходимости формируется корректирующее воздействие 8, процесс повторения двигательного действия продолжается до полного закрепления его правильного выполнения.
Большое значения для формирования двигательной пластики имеет начальный этап осознания двигательной структуры. На этом этапе определяют и жестко устанавливают углы в суставных сочленениях в характерных точках двигательной структуры, регистрируют и запоминают по данным периферийных датчиков их текущее значение при медленном (квазистатическом) выполнении двигательного действия и после полного выполнения двигательного действия или выполнения необходимой части его выводят результаты анализа на экран дисплея средства вычислительной техники или в отпечатанном виде для экспресс-анализа.
Устройство для осуществления заявляемого способа формирования и коррекции двигательной пластики в обобщенном виде (фиг.2) содержит: периферийные датчики силовых 11 и пространственных 12 характеристик человека 1 при выполнении им двигательного действия, информационные выходы этих датчиков подключены через аналого-цифровые преобразователи 13 к системному блоку 14 микроЭВМ (персонального компьютера) 15, в состав которого входит также дисплей 16, подключенный к системному блоку 14, к которому подключено также печатающее устройство 17, и управляется микроЭВМ с помощью пакета прикладных программ 18, где содержится информация и об эталонном (образцовом) двигательном действии, а периферийные датчики пространственных 12 характеристик запитаны от стабилизированного источника питания 19.
Работает устройство следующим образом.
С помощью периферийных датчиков силовых 11 и пространственных 12 характеристик и аналого-цифровых преобразователей 13 получают и обрабатывают первичную информацию о пространственном положении суставных сочленений и силовых воздействий человека 1, что соответствует блоку сбора и обработки информации 3 на мнемосхеме (фиг.1). Далее эта информация подвергается различному в зависимости от этапа анализу. На этапе осознания двигательной структуры 2 (фиг.1) в системном блоке 14 в микроЭВМ 15 (фиг.2) под воздействием соответствующего программного обеспечения пакета прикладных программ 18 анализируется статическое положение суставных сочленений в характерных точках двигательного действия по отношению к эталонному (образцовому) двигательному действию, представленному на мнемосхеме (фиг.1) блоком 5, а сам сравнительный анализ статических положений - блоком 4. Результаты анализа высвечиваются на экране дисплея 16 микроЭВМ 15 (фиг.2) или печатаются в цифровой или графической форме печатающим устройством 17. По результатам анализа человек 1 корректирует положение суставных сочленений, добиваясь приближения к эталонному значению. И это делается последовательно во всех характерных точках двигательного действия и, таким образом, человек 1 осознает, вживаясь в требуемую двигательную структуру.
На следующем этапе действий человек 1 включает в активную работу 6 группы мышц суставных сочленений (фиг.1), в системном блоке 14 (фиг.2) микроЭВМ 15 под воздействием соответствующего программного обеспечения пакета прикладных программ 18 анализируется динамическое состояние суставных сочленений, то есть текущего значения двигательного действия по отношению к образцовому двигательному действию, представленному на мнемосхеме (фиг.1) блоком 5, а сам сравнительный анализ динамических положений суставных сочленений - блоком 7 (фиг.1). Результаты анализа высвечиваются на экране дисплея 16 (фиг.2) микроЭВМ 15, а также печатаются, при необходимости, на бумажном носителе печатающим устройством 17. По результатам этого анализа обучаемый, по указаниям микроЭВМ 15, формирует корректирующие воздействия, которые позволяют итерационно приблизиться к правильному выполнению двигательного действия.
После того как двигательное действие выполняется устойчиво правильно, наступает заключительный этап формирования и коррекции двигательной пластики - этап закрепления в процессе повторения - 9 (на фиг 1).
На этом этапе обучаемый многократно повторяет двигательное действие, периодически осуществляется контроль правильности выполнения двигательного действия - блок 10 на мнемосхеме фиг.1, в результате которого, при необходимости, формируется корректирующее воздействие - блок 8 (фиг.1), аппаратурно реализуемое подобно осуществлению этапа 6 - включение в активную работу групп мышц суставных сочленений.
Устройство, представленное на фиг.2, пригодно для формирования и коррекции пластики любой части тела занимающегося и его тела в целом. Например, при формировании пластики в хореографии важным является формирование двигательной пластики верхних и нижних конечностей. Для плечевого пояса одним из двигательных действий является волновое движение рук. Устройство, позволяющее формировать данное двигательное действие, представленное на фиг.3, содержит в основном те же блоки, что устройство, представленное на обобщенной блок-схеме фиг.2: аналого-цифровые преобразователи 13, системный блок 14 и дисплей 16 микроЭВМ 15, печатающее устройство 17, пакет прикладных программ 18 и стабилизированный источник питания 19. Особенность этого устройства состоит в том, что в качестве периферийных датчиков силовых 11 характеристик используется тензометрическая платформа, а в качестве периферийных датчиков пространственных 12 характеристик положения суставных сочленений применены электрогониометры 20, 21, 22, 23, 24, 25. Из них электрогониометры 20, 21, 22 устанавливаются на крупных суставах, соответственно на плечевом, локтевом и лучезапястном суставах, а электрогониометры 23, 24 и 25 устанавливаются на суставах фаланг пальцев руки, и для осуществления этой установки они выполнены в миниатюрном исполнении. На фиг.4 укрупненно для наглядности показано размещение и закрепление электрогониометров 20, 21, 22, 23, 24, 25 на руке человека 1. Электрогониометры 20, 21, 22 установлены и закреплены индивидуально на плечевом, локтевом и лучезапястном крупных суставах соответственно, а электрогониометры 23, 24 и 25 размещены на суставах фаланг пальца руки, например, на среднем пальце, т.е. на мелких суставах кисти.
Электрогониометры, контролирующие положение мелких суставных сочленений, выполнены в миниатюрном исполнении, конструктивно обеспечивающем возможность их установления на мелких суставах, последовательного сочленения друг с другом, подстройки и фиксирования межсуставных расстояний.
Важным элементом заявляемого способа является эталонное (образцовое) двигательное действие - блок 5 на мнемосхеме (фиг.1), так как оно является тем двигательным действием, к которому должно итерационно приближаться двигательное действие обучаемого - человека 1. Его можно получить многими способами. Рассмотрим два возможных способа.
Один из них - скурпулезный биомеханический и теоретическо-механический анализ двигательного действия, например волнового движения руки человека. В его основу может быть положен анализ пространственных положений сочленений плечевого, локтевого, лучезапястного суставов и суставов фаланг пальцев кисти. Это потребует выполнения большого объема сложной работы, при которой придется учитывать законы биомеханики и теоретической механики, привлечь теорию математического анализа различных кривых и математическое моделирование, воспользоваться элементами компьютерной графики и разработать сложное программное обеспечение для микроЭВМ. Работа трудоемкая и достаточно сложная, но она может позволить получить относительно точную математическую и биомеханическую модель указанного двигательного действия и соответствующее программное обеспечение для микроЭВМ.
Второй способ менее трудоемок, относительно менее точен, но приемлем для практического использования. Он состоит в следующем. Специалист высокого класса (назовем его экспертом) выполняет требуемое двигательное действие. Используя устройство, реализующее блок-схему фиг.3, записывают это двигательное действие в память системного блока 14 микроЭВМ 15. Эксперт и специалист-исследователь анализируют полученную запись: выделяют характерные точки записанного двигательного действия, выделяют один полный период двигательного действия для статического анализа и несколько повторяющихся двигательных действий для динамического анализа двигательных действий обучаемого. Эти записанные элементы, поддерживаемые соответствующим программным обеспечением для микроЭВМ, в дальнейшем могут использоваться как образцовые двигательные действия для статического и динамического анализа. Поскольку для записи образцовых двигательных действий эксперта и обучаемого используется одно и тоже устройство, то погрешности при этом могут быть уменьшены до минимума.
Поэтому второй способ формирования образцового (эталонного) двигательного действия может найти достаточно широкое применение в устройствах, реализующих способ формирования и коррекции двигательной пластики. Кроме того, этот способ и технические средства, его реализующие, могут быть использованы и в других областях, например в тяжелой атлетике, в медицине при реабилитации после различных травм и т.д.
Размеры мелких суставов, например, кисти руки предъявляют специфические требования к конструкции электрогониометров, которые необходимо разместить на этих суставах для получения информации об их пространственном положении. Принципы, на основе которых они могут быть построены, - самые разные. Это и тензометрические мосты, выходные сигналы которых пропорциональны углу изгиба суставного сочленения, и миниатюрные вращающиеся трансформаторы, и миниатюрные потенциометры, движок которых перемещается по кругу и т.д. Одна из возможных конструкций электрогониометра, построенного на основе миниатюрного потенциометра (фиг.5), содержит шарнир, состоящий из двух частей 26 и 27, скрепленных друг с другом с помощью оси 28, на одной части 26 которого установлен вертикально кронштейн 29 с закрепленным горизонтально на нем с помощью гайки 30 миниатюрным потенциометром 31 с круговым перемещением его движка, на ось 32 которого плотно насажен шкив 33 с канавкой на наружной его поверхности, а на другой части 27 шарнира установлен вертикально кронштейн 34 с вертикальным рядом отверстий 35, к которому крепятся первые концы нерястяжимой 36 и растяжимой упругой 37 нитей, намотанных на шкив 33 в противоположных направлениях и закрепленных на нем вторыми концами, при этом свободный конец одной части шарнира, например, 27 выполнен в виде плоского штыря 38, а свободный конец второй части 26 шарнира выполнен в виде гнезда 39. Штырь 38 и гнездо 39 обеспечивают сочленение друг с другом двух и более миниатюрных электрогониометров. С помощью, например, отверстий 40 в штыре 38 и отверстия 41 в гнезде 39 осуществляют подстройку и фиксирование межосевых расстояний шарниров сочленяемых миниатюрных электрогониометров, и обе части 26 и 27 шарнира электрогониометра прикрепляются к суставу с помощью крепежных ремешков 42 и 43, закрепленных на частях 26 и 27 шарнира соответственно. Для того чтобы ось шарнира 28 находилась на оси вращения исследуемого сустава, применяются сменные прокладки 44 и 45, например из пористой резины, прикрепляемые к частям 26 и 27 шарнира соответственно. К выводам 46, 47, 48 потенциометра 31 подпаиваются провода, с помощью которых этот потенциометр подключается к АЦП 13 и к стабилизированному источнику питания 19 (фиг.3).
Работает миниатюрный электрогониометр следующим образцом.
С помощью крепежных ремешков 42, 43 и сменных прокладок 44, 45 устанавливают электрогониометр на исследуемом суставном сочленении таким образом, чтобы ось 28 вращения шарнира совпадала с осью вращения суставного сочленения. При сгибании сустава поворачивается шкив 33, т.к. при этом части 26 и 27 шарнира поворачиваются друг относительно друга на угол, равный углу сгибания сустава. Нерастяжимая нить 36 заставляет вращаться шкив 33. Ось 32 движка потенциометра 31 также поворачивается, и этот движок перемещается, так как шкив 33 плотно пасажен на ось 32 движка потенциометра 31. На информационном выходе электрогониометра появляется электрический сигнал, пропорциональный углу сгиба суставного сочленения (при соответствующей тарировке). При выпрямлении сустава нерастяжимая нить 36 ослабляется, а растяжимая гибкая нить 37 выбирает эту слабину, поворачивает шкив 33 и ось 32 движка потенциометра 31, перемещает движок потенциометра в исходное положение, и электрический сигнал на информационном выходе электрогониометра возвращается к исходному значению. Таким образом, получают первичную информацию о пространственном положении исследуемого сочленения.
По сравнению с прототипом предлагаемый способ формирования и коррекции двигательной пластики и устройство, его реализующее, обладает расширенными функциональными возможностями, поскольку позволяет формировать двигательные действия не только при освоении и обучении сложным движениям в области хореографии, но и в области тяжелой атлетики, армрестлинга и в других спортивных дисциплинах, а также проводить исследования биомеханических закономерностей мелкой моторики мышц, выявлять особенности движения сочленений верхних и нижних конечностей и создавать предпосылки контролируемого формирования двигательной пластики и ее коррекции.
Возможность регистрировать, запоминать и выдавать по запросу зарегистрированные двигательные действия в реальном масштабе времени практически по завершению выполнения движения и выдавать необходимые рекомендации для устранения ошибок позволяет прослеживать и корректировать тренировочный процесс в статике и в динамике, способствуя повышению эффективности тренировок и мастерства спортсменов и обучаемых двигательным действиям.
СПИСОК ЛИТЕРАТУРЫ
1. Хатуев Л.М. Программируемое обучение технике тяжелоатлетического двоебория. Ж. “Тяжелая атлетика”. Ежегодник, 1979. М.: Физкультура и спорт, 1979. С.20-30.
2. Мюльберг И.Э., Фураев А.Н. Оперативная коррекция технического мастерства тяжелоатлетов с помощью ЭВМ. Ж. “Физкультура и спорт”, 1986. С.5-7.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ МЕЛКОЙ МОТОРИКИ С ИСПОЛЬЗОВАНИЕМ СЕНСОРНЫХ ПЕРЧАТОК | 2011 |
|
RU2494670C2 |
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ И ТРЕНИРОВКИ СПОРТСМЕНОВ-АРМРЕСТЛЕРОВ | 2009 |
|
RU2413557C1 |
| СПОСОБ ОЗДОРОВЛЕНИЯ И СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ ЧЕЛОВЕКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2238765C2 |
| Устройство для управления двигательными функциями спортсмена в процессе обучения | 1979 |
|
SU786987A1 |
| СПОСОБ НЕЙРОДИНАМИЧЕСКОЙ (НЕЙРОСЕНСОРНОЙ) КОРРЕКЦИИ ДЛЯ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНЫХ, ПОЗНЫХ, СЕНСОРНЫХ И КОГНИТИВНЫХ ФУНКЦИЙ У БОЛЬНЫХ С ПАТОЛОГИЕЙ НЕРВНОЙ СИСТЕМЫ И ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА И КОСТЮМ ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2013 |
|
RU2573535C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПРИНТЕРОВ И ФУТБОЛИСТОВ | 2005 |
|
RU2297866C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ И РЕГИСТРАЦИИ ПЕРЕМЕЩЕНИЯ ОБЪЕКТА | 2008 |
|
RU2389060C2 |
| УСТРОЙСТВО БЕЗЫНЕРЦИОННОГО ЗАДАНИЯ ПЕРЕМЕННОГО СОПРОТИВЛЕНИЯ ИЛИ ОБЛЕГЧЕНИЯ В ТРЕНИРОВОЧНОМ ПРОЦЕССЕ СПОРТСМЕНОВ | 2003 |
|
RU2243016C1 |
| СПОСОБ ОБУЧЕНИЯ МЛАДШИХ ШКОЛЬНИКОВ С РЕЧЕВЫМИ НАРУШЕНИЯМИ | 2004 |
|
RU2287190C2 |
| Способ реабилитационной коррекции мелкой моторики руки | 2015 |
|
RU2616338C1 |
Изобретение относится к области обучения и может быть использовано при обучении элементам двигательной пластики и двигательных навыков и умений. Его использование позволяет получить технический результат в виде обеспечения исследований биомеханических закономерностей мелкой моторики мышц, выявления особенностей движения суставных сочленений верхних и нижних конечностей, создания предпосылок для формирования и коррекции двигательной пластики. Технический результат достигается за счет получения во время выполнения движения информации с помощью периферийных датчиков, быстрой обработки и анализа данных от этих датчиков средствами вычислительной техники в так называемом режиме "реального времени", запоминания и выдачи результата анализа в цифровой или графической форме на экране дисплея или в отпечатанном виде. Отличительной особенностью является то, что формируют требуемое двигательное действие как образцовое (эталонное), создают его математическую или электрическую модель и формируют ее в виде математического программного обеспечения для микроЭВМ (персонального компьютера). 1 з.п. ф-лы, 5 ил.
| СПОСОБ ОПРЕДЕЛЕНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ МЫШЕЧНО-СУХОЖИЛЬНЫХ СТРУКТУР ГОЛЕНОСТОПНОГО СУСТАВА СПОРТСМЕНА | 1997 |
|
RU2124310C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МЕЖЗВЕННЫХ УГЛОВ НИЖНИХ КОНЕЧНОСТЕЙ ПРИ ХОДЬБЕ | 1991 |
|
RU2019132C1 |
| US 6098458 А, 08.08.2000 | |||
| US 4531391 А, 30.07.1985. | |||

