Изобретение относится к спортивным тренажерам, в частности к устройствам для тренировки и обучения спортсмено-армрестлеров. Известно тренировочное устройство [1], содержащее прямоугольное основание, фиксируемое на плоской поверхности стола посредством регулировочных зажимов. На основании жестко закреплена опорная конструкция, внутри которой проходит цилиндрический шток, шарнирно соединенный с подвижным рычагом. С противоположного конца шток переходит в Г-образную стойку, связанную посредством пружин с подвижным элементом натяжения.
Работа на устройстве сводится к перемещению рычага в поперечном направлении за счет сгибания руки в локтевом суставе.
Основное достоинство - простота конструкции.
Но в этом и его недостатки:
- во-первых, только один режим работы - растягивание пружины;
- во-вторых, нет возможности регистрации двигательного действия с целью его анализа;
- в-третьих, нет возможности снятия и регистрации биомеханических характеристик.
Наиболее близким техническим решением, выбранным в качестве прототипа, является устройство [2], которое содержит телескопическую стойку, зафиксированную на столе для армрестлинга, к которой прикреплены два рычага: нижний, расположенный перпендикулярно стойке и посаженный на втулку с фиксатором таким образом, что он может перемещаться вверх или вниз по стойке и фиксироваться, а верхний рычаг посажен на ось и может подниматься, переходя из горизонтального положения в вертикальное, и на верхнем конце телескопической стойки закреплен блок, который можно поднять или опустить, фиксируя телескопическую стойку на разной длине, при этом как нижний, так и верхний рычаги снабжены отверстиями для зацепления пружин и троса.
К тросу, перекинутому через блок, прикреплена рукоятка, за которую спортсмен тянет при выполнении движения, и натяжение троса фиксируется тензодатчиком, вставленным в разрыв троса, и, кроме того, устройство имеет в своем составе компьютер для регистрации значений и датчик перемещения троса.
Достоинства данного технического решения:
- во-первых, появилась возможность создания безынерционного узла переменного сопротивления на основе применения пружин;
- во-вторых, в нем с помощью пружин (для которых справедлив закон Гука) реализуются четыре режима: постоянная величина натяжения троса, режим возрастающего сопротивления, убывающий режим сопротивления и убывающе-возрастающий режим сопротивления.
К недостаткам этого технического решения можно отнести следующее:
- во-первых, нет фиксации положения локтя руки спортсмена;
- во-вторых, рукоятка не обеспечивает оптимального положения кисти руки спортсмена;
- в-третьих, движения руки и троса не совсем согласованы;
- в-четвертых, компьютер используется только для регистрации двигательного действия.
Задачей данного изобретения является повышение качества обучения начинающих спортсменов-армрестлеров путем освоения ими правильного движения руки и туловища с самого начала и при минимальной затрате энергоресурсов при разных режимах переменного сопротивления.
Поставленная задача решается тем, что начинающему спортсмену-армрестлеру предстоит обучаться двигательным действиям на устройстве, содержащем телескопическую стойку, механически связанную со столом для армрестлинга, к которой прикреплены два рычага: нижний, расположенный перпендикулярно стойке и посаженный на втулку с фиксатором таким образом, что его можно перемещать вверх или вниз по телескопической стойке и фиксировать его положение, а верхний рычаг, снабженный фиксирующей втулкой, посажен на ось и его можно перемещать, поднимать, переводя из горизонтального положения, задаваемого передвижным фиксатором, в вертикальное, а на верхнем торце телескопической стойки закреплен блок, который можно поднимать или опускать, фиксируя телескопическую стойку на разной длине, при этом как нижний, так и верхний рычаги снабжены отверстиями для закрепления пружин, трособлочную систему: трос, который перекинут через упомянутый блок, рукоятку, за которую спортсмен тянет трос на тренировке, силовой датчик, встроенный в разрыв троса, с помощью которого измеряется и фиксируется натяжение троса, и в него введены: полный комплект персонального компьютера (ПК) - системный блок, дисплей, клавиатура, «мышь» и программное обеспечение к персональному компьютеру, а в тренажер - платформа, три дополнительных блочка, две миниатюрных механических стойки с плавной регулировкой перемещения подвижной их части, одна механическая миниатюрная стойка с дискретным перемещением верхнего элемента - рукоятки и с возможностью поворота вокруг горизонтальной и вертикальной осей, резисторный датчик перемещения троса, узел настройки троса, узел регулировки под руку спортсмена, узел точной выборки слабины троса, два аналого-цифровых преобразователя (АЦП) и стабилизированный источник электропитания, причем в устройстве один конец троса прикреплен через силовой датчик к упомянутому верхнему рычагу, а сам трос огибает упомянутый блок, первый и второй дополнительные блочки, проходит через направляющую узла настройки троса, огибает дополнительный третий блочек, закрепленный с возможностью вращения в узле регулировки под руку спортсмена, и вторым концом трос закреплен на узле настройки троса, при этом резисторный датчик перемещения троса, расположенный на механической миниатюрной стойке дискретного перемещения верхнего элемента, жестко сочленен с торцом вращающейся горизонтальной оси этой стойки и подсоединен электрически через первый АЦП к внутренней шине системного блока ПК, а силовой датчик через второй АЦП подключен электрически к той же внутренней шине системного блока ПК и оба запитаны от стабилизированного источника электропитания, а программное обеспечение задает работу этих периферийных датчиков, работу устройства в целом и содержит комплекс программ, обеспечивающих выполнение всех математических работ в устройстве.
Отличительными признаками предлагаемого решения является следующее:
- во-первых, в устройство введены полный комплект персонального компьютера и программное обеспечение к нему;
- во-вторых, в тренажер, образованный механически сочлененными столом для армрестлинга и телескопической стойкой, введены три дополнительных блочка, две миниатюрных механических стойки с плавной регулировкой перемещения их части, одна механическая миниатюрная стойка с дискретным перемещением ее верхнего элемента и возможностью ее вращения вокруг горизонтальной оси, узел настройки троса, узел регулировки под руку спортсмена, элемент точной выборки слабины троса, резисторный датчик перемещения троса, два аналого-цифровых преобразователя и стабилизированный источник электропитания;
- в-третьих, так как введены новые элементы и узлы, появляются новые связи: один конец троса тросо-блочной системы прикреплен через силовой датчик к верхнему рычагу стойки, а сам трос огибает упомянутый блок и первый и второй дополнительные блочки, проходит через узел настройки троса, огибает дополнительный третий блочек, закрепленный в узле регулировки под руку спортсмена, и вторым концом трос закреплен на узле настройки троса, при этом резисторный датчик перемещения троса, расположенный на миниатюрной стойке дискретного перемещения верхнего элемента, жестко сочленен с торцом горизонтальной вращающейся оси этой стойки и подсоединен электрически через первый АЦП к внутренней шине системного блока ПК, и они запитаны от стабилизированного источника электропитания;
в-четвертых, разработанное программное обеспечение задает работу всех АЦП, силового датчика, резисторного датчика перемещения троса и устройства в целом, а также выполняет все расчетные работы в устройстве.
В заявленном устройстве отличительные признаки проявляют свойства, известные в других областях науки и техники, а в совокупности с признаками прототипа проявляют свойства, которые позволяют повысить качество подготовки начинающих спортсменов-армрестлеров благодаря освоению правильной траектории движения руки и при минимальной для этого затрате энергоресурсов, а также выступать вместо спарринг-партнера опытного спортсмена-армрестлера, что указывает на соответствие заявляемого технического решения критерию «существенные отличия».
Заявляемое устройство поясняют схематические чертежи.
На фиг.1, 2 приведено устройство в целом: на фиг.1 - вид спереди, а на фиг.2 - вид сверху.
На фиг.3, 4 показана одна из возможных конструкций миниатюрной стойки с плавной регулировкой.
На фиг.5, 6 представлена одна из возможных конструкций узла точной выборки слабины троса.
На фиг.7, 8 представлена одна из возможных конструкций узла настройки троса.
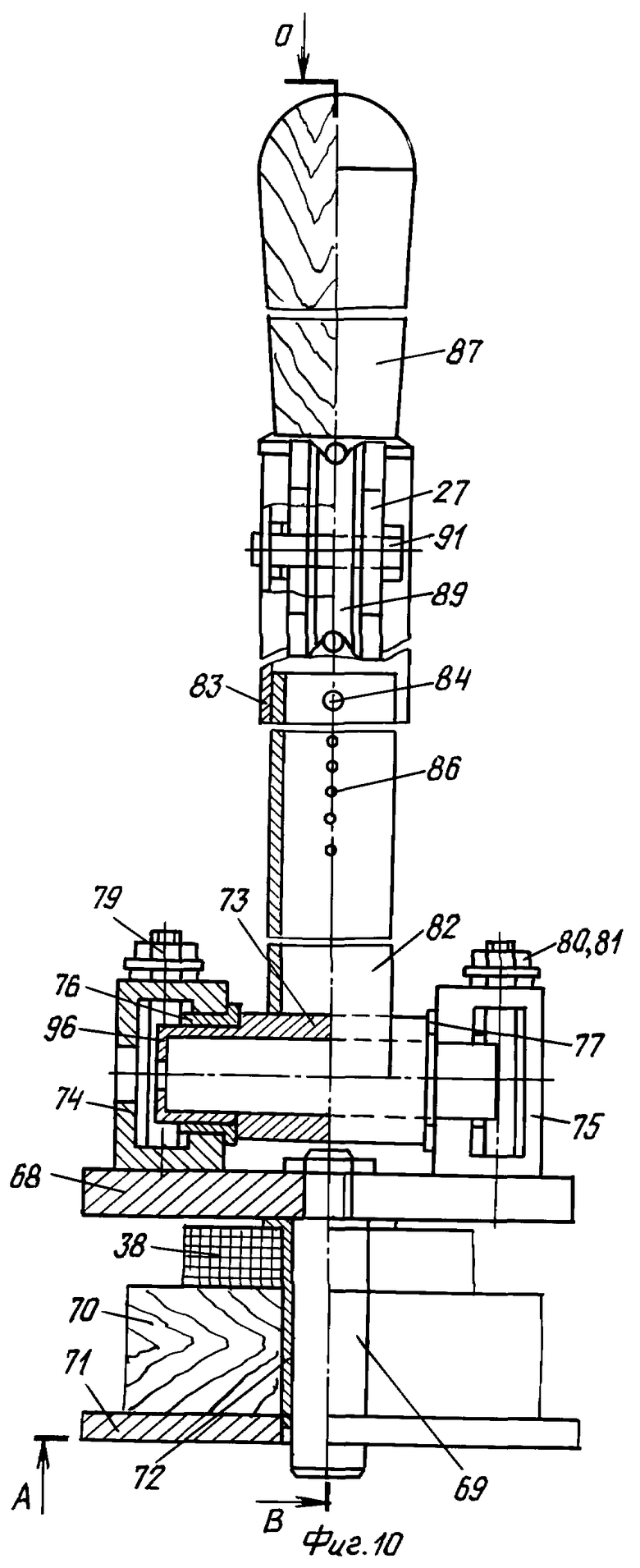
На фиг.9, 10 представлена одна из возможных конструкций узла регулировки под руку спортсмена: на фиг.9 - вид спереди, а на фиг.10 - вид сбоку справа.
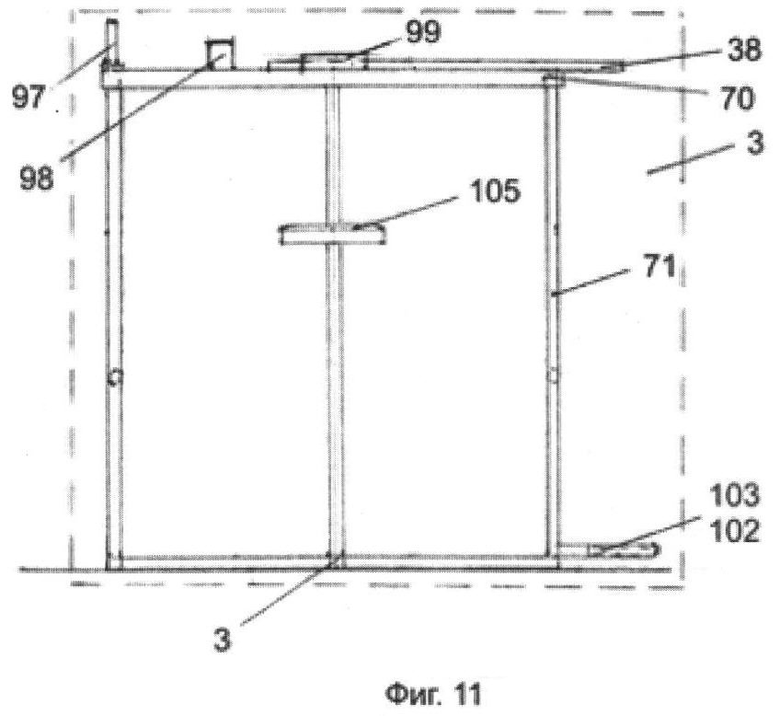
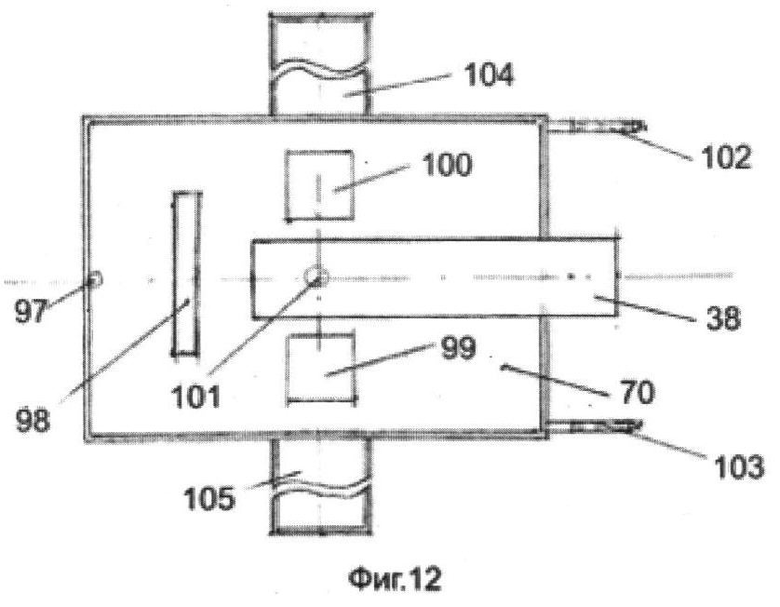
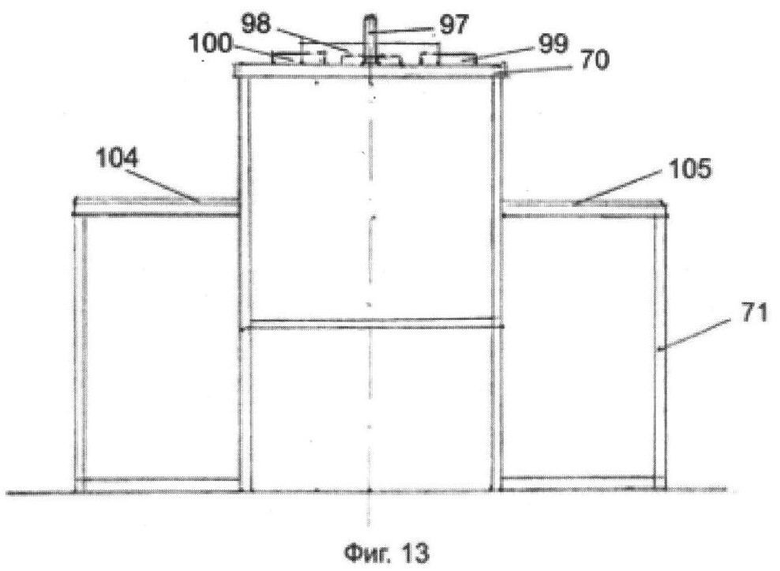
На фиг.11, 12, 13 приведена одна из возможных конструкций стола для армрестлинга для выполнения упражнения в положении сидя: на фиг.11 - вид спереди, на фиг.12 - вид сверху и на фиг.13 - вид сбоку слева.
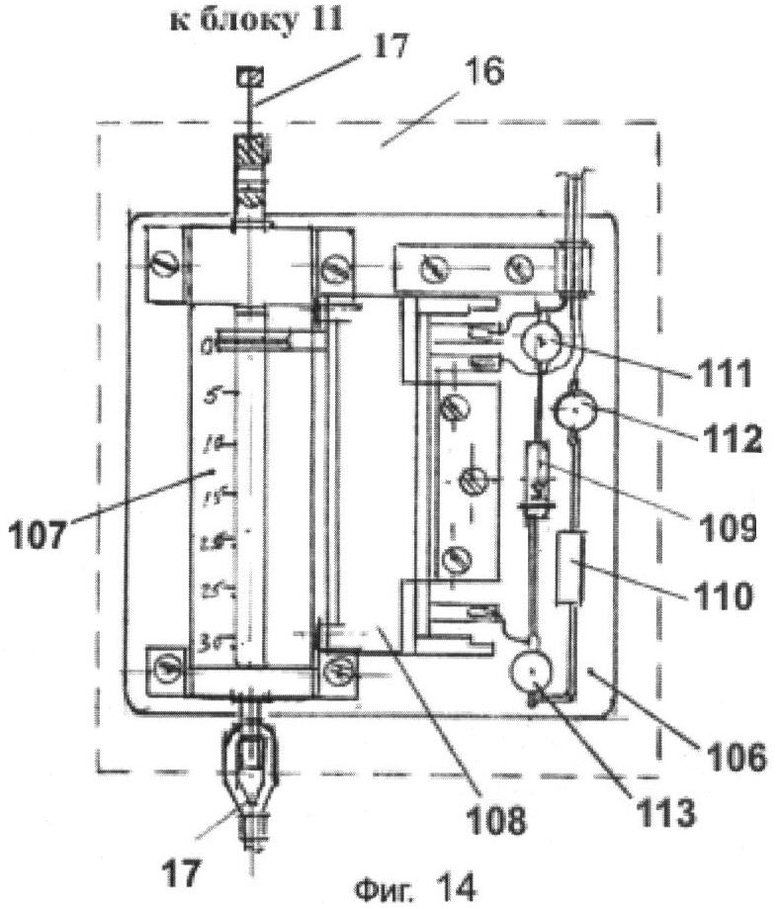
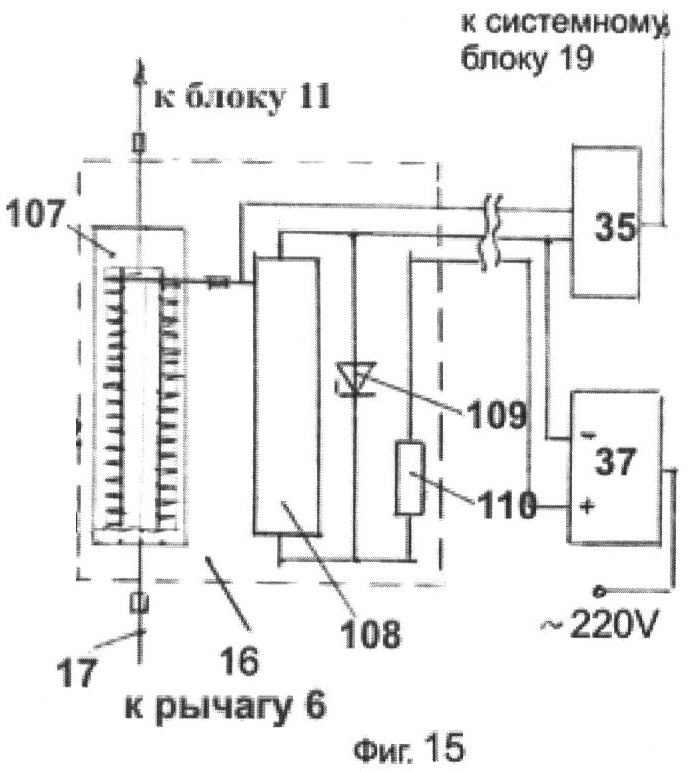
На фиг.14 показана одна из возможных конструкций силового датчика, а фиг.15 - принципиальная электрическая схема силового датчика.
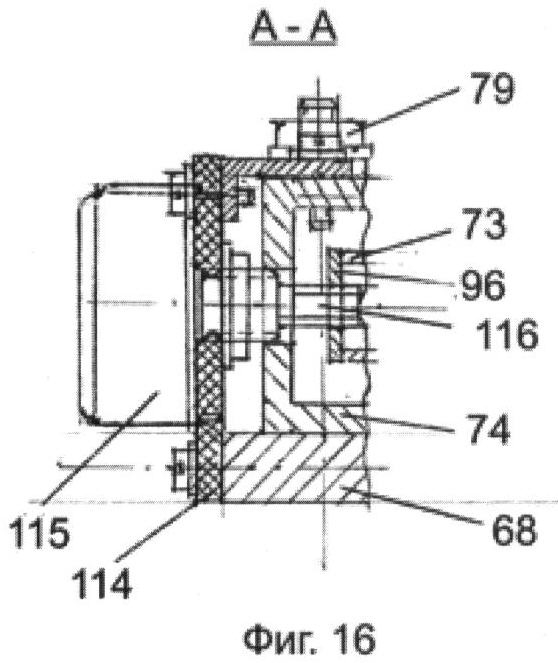
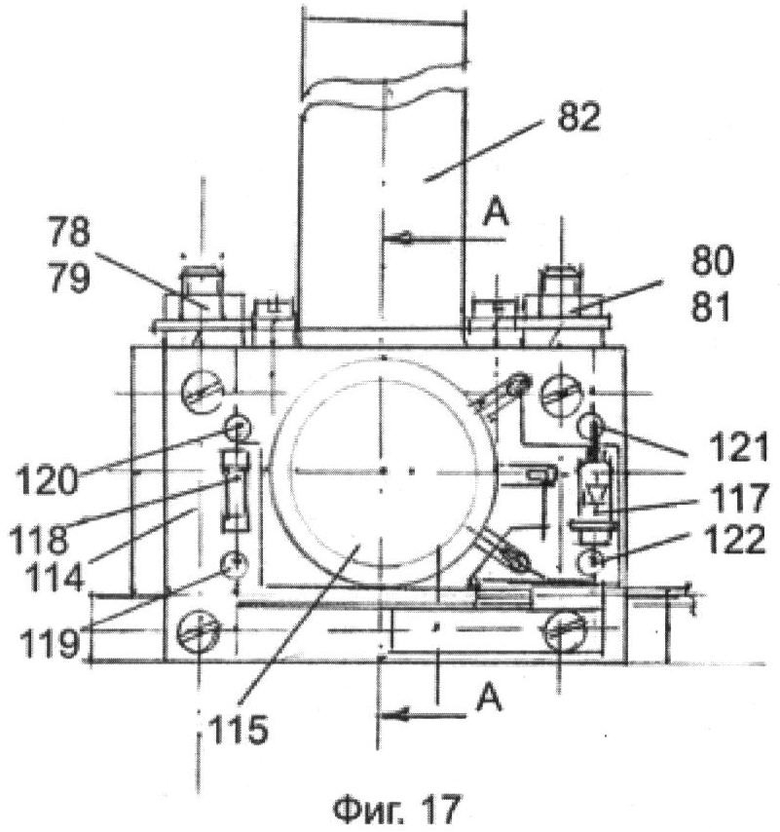
На фиг.16 приведена конструкция датчика перемещения троса, а на фиг.17 - электрическая схема резисторного датчика перемещения троса.
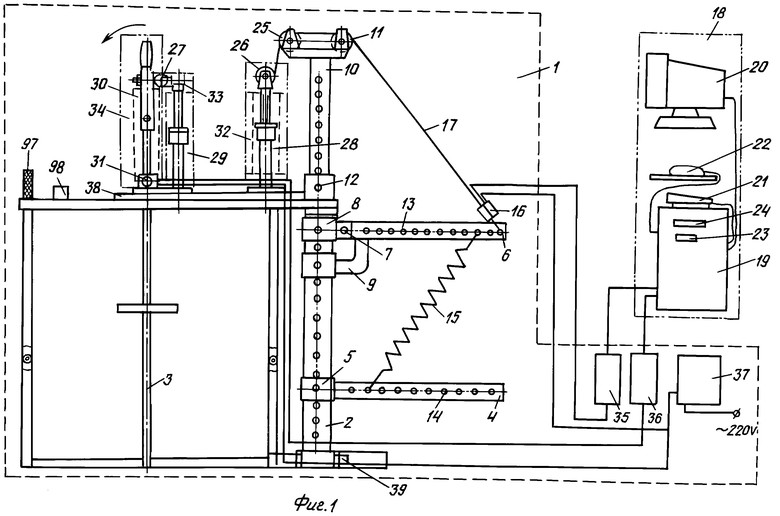
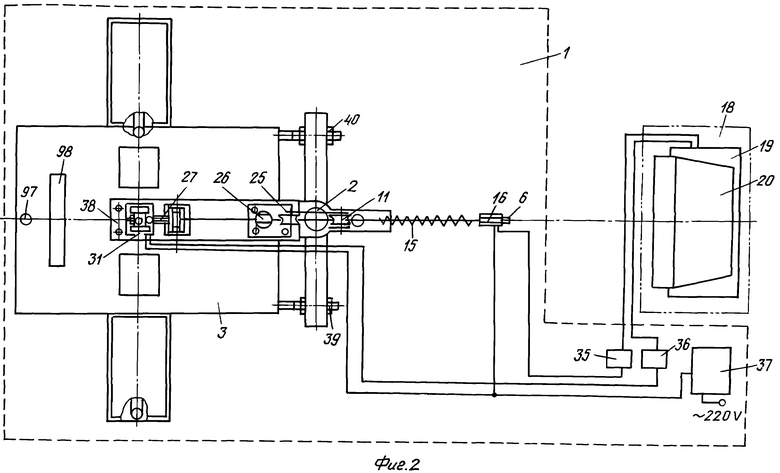
Устройство включает в себя тренажер, персональный компьютер (фиг.1, 2) и программное обеспечение. Тренажер 1 (оконтурен пунктирными линиями) содержит телескопическую стойку 2, механически связанную со столом для армрестлинга 3, к которой прикреплены два рычага: нижний 4, расположенный перпендикулярно телескопической стойке 2 и посаженный на втулку 5 с фиксатором, работающим таким образом, что втулка 5 и рычаг 4 могут перемещаться вверх и вниз по телескопической стойке 2 и фиксироваться, а верхний рычаг 6 посажен на ось 7, размещенную на втулке 8, имеющую возможность перемещаться по телескопической стойке 2 и фиксироваться, и может подниматься, переходя из горизонтального положения в вертикальное, задаваемое также передвижным фиксатором 9. На верхнем торце 10 телескопической стойки 2 закреплен блок 11, который можно поднимать или опускать, фиксируя его положение фиксатором 12, верхний торец 10 телескопической стойки 2 на разной длине.
Нижний 4 и верхний 6 рычаги снабжены отверстиями (в верхнем они показаны цифрой 13, а в нижнем - цифрой 14) для закрепления пружин 15 и пружин силового датчика 16 верхнего рычага, ко второму концу силового датчика 16 крепится трос 17, перекинутый через упомянутый блок 11. В устройство введен полный комплект персонального компьютера 18 (оконтурен штрихпунктирными линиями), включающий системный блок 19, дисплей 20, клавиатуру 21 и оптическую «мышь» 22. Программное обеспечение, записанное на дискете или диске, вставляется в системный блок 19, соответственно в дисководы 23 и 24, и при подготовке устройства к работе инициируется клавиатурой 21.
В тренажер 1 введены дополнительно: три блочка 25, 26, 27, две механические миниатюрные стойки с плавной регулировкой перемещения их головной части 28, 29, одна механическая миниатюрная стойка с дискретным перемещением верхнего элемента - рукоятки с ее поворотом вокруг горизонтальной и вертикальной осями 30 (все они оконтурены пунктирными линиями), резисторный датчик перемещения троса 31, узел точной выборки слабины троса 32, узел настройки троса 33, узел регулировки под руку спортсмена 34 (все они оконтурены штрихпунктирными линиями), два аналого-цифровых преобразователя (АЦП) 35 и 36 и один стабилизированный источник электропитания 37.
Узел точной выборки слабины троса 32, узел настройки троса 33 и узел регулировки под руку спортсмена 34 размещены на платформе 38, закрепленной на столе для армрестлинга 3 и одновременно жестко связанной с телескопической стойкой 2. Крепления 39 и 40 дополнительно фиксируют телескопическую стойку 2 относительно стола для армрестлинга 3. Узел регулировки под руку спортсмена 34 закреплен на платформе 38 и на столешнице стола для армрестлинга 3 посредством вертикальной оси, проходящей через них, и обеспечивает вращение в горизонтальной плоскости (на фиг.1 он не показан).
Один конец троса 17 закреплен через силовой датчик 16 на верхнем рычаге 6. Сам трос 17 огибает блок 11, первый 25 и второй 26 дополнительных блочка, проходит через направляющую узла настройки 33, огибает дополнительный третий блочек 27, закрепленный в узле регулировки под руку спортсмена 34 и вторым концом трос 17 закреплен на узле настройки троса 33. При этом резисторный датчик перемещения троса 31, расположенный на механической миниатюрной стойке дискретного перемещения верхнего элемента - рукоятки 34, жестко сочленен с торцом вращающейся горизонтальной оси этой стойки и подсоединен электрически через АЦП 36 к внутренней шине системного блока 19 ПК 18, а силовой датчик 16 через АЦП 36 подключен электрически к той же внутренней шине системного блока 19 ПК 18, и они запитаны от стабилизированного источника электропитания 37.
Перед рассмотрением принципа работы устройства необходимо разобраться с переменным сопротивлением, реализуемым с помощью пружин, в режиме, когда справедлив закон Гука [3].
Переменное сопротивление рассмотрим с упрощающими допущениями: все элементы конструкции будем считать невесомыми, все (кроме пружин) нерастяжимыми, пренебрежем радиусами блока и блочков, силой трения и изменением коэффициента жесткости реальных пружин при их растяжении. При таких условиях систему можно считать квазистатической и применять к ней законы статики.
С этими допущениями на математической модели узла переменного сопротивления можно найти [3]: момент, создаваемый пружиной Мп, косинусы углов, перемещение рукоятки, силу натяжения троса Fт, которые позволяют перейти к реальному устройству с параметрами, присущими реальному узлу переменного сопротивления: расстояние от блока 11 до верхнего рычага 6 C1=0,5 (м), расстояние от верхнего рычага 6 до нижнего 4 С2=0,71 (м), расстояние от телескопической стойки 2 до оси вращения 7 С3=0,045 (м).
С помощью такого узла можно реализовать режим возрастающего сопротивления. Для этого достаточно положить расстояние от оси вращения верхнего рычага 6 до точки прикрепления троса X1=0,315 (м), от оси вращения 7 до точки прикрепления пружины Х2=0,315 (м), от проекции оси вращения на нижний рычаг 4 до точки прикрепления нижнего конца пружины Х=0,515 (м).
Убывающий режим сопротивления реализуются при X1=0,315 (м), Х2=0,315 (м), Х3=0,115 (м).
Постоянный (квазипостоянный) режим сопротивления (на пятипроцентном уровне точности) реализуется с помощью двух групп пружин, расположенных в рассмотренных выше двух положениях. Первая группа пружин, создающая возрастающий режим сопротивления обладает коэффициентом жесткости в два раза большим, чем вторая. Для расчета нескольких пружин достаточно сложить значения силы для каждой из групп. Величину натяжения троса можно менять с помощью изменения расстояния С2, количества пружин и, если не нужно точно придерживаться режима сопротивления, то и изменением положения точек прикрепления пружин и троса (силового датчика).
Для создания убывающе-возрастающего режима сопротивления необходимо добавить еще один упругий элемент, который конструктивно представляет собой пружину, один конец которой соединен с верхним рычагом 6, а другой - с дополнительным тросом, длина которого может регулироваться в зависимости от потребности во включении упругого элемента в нагрузку в нужной фазе движения.
Работают с устройством следующим образом.
Инженер-исследователь или тренер вставляет дискету или диск с программным обеспечением в соответствующее гнездо 23 или 24 системного блока 19 персонального компьютера 18 (фиг.1) и с помощью клавиатуры 21 и оптической «мыши» 22 инициирует ввод программного обеспечения в оперативную память компьютера 18. Это позволяет проверить следующие блоки и узлы: работоспособность силового датчика 16, с помощью которого измеряется, запоминается и регистрируется через АЦП 35 и системный блок 19 натяжение троса 17, и резисторного датчика перемещения троса 31 через АЦП 36 и подобно же через системный блок 19, а также подвижность блока 11 и дополнительных блочков 25, 26, 27, работу узла настройки троса 33, вращение в горизонтальной и вертикальной плоскостях узла регулировки под руку спортсмена 34, узла точной выборки слабины троса 32, двух АЦП 35 и 36, стабилизированного источника электропитания 37, организацию одного полиспаста при блочке 27 и одновременно проверить правильность работы программного обеспечения. Затем тарируются силовой датчик 16 и резисторный датчик перемещения троса 31 соответствующими измерительными средствами.
С помощью узла регулировки под руку спортсмена 34 и узла настройки троса 33 производится настройка устройства 1 под конкретного спортсмена, а с помощью узла точной выборки слабины троса 32 выбирается слабина троса 17, после чего тренер выбирает один из упомянутых четырех режимов переменного сопротивления путем подбора системы пружин 15 и их закрепления на рычагах 4 и 6 в отверстиях 13 верхнего рычага 6 и отверстиях 14 в нижнем рычаге 4 (смотри настройку узла переменного сопротивления). После этого спортсмен приступает к двигательным действиям, выполняя их по 6-8 повторений в 8-10 подходах [2, с.46] с акцентом на максимальную начальную скорость. Результаты этих двигательных действий записываются и регистрируются в памяти системного блока 19 персонального компьютера 18 и по требованию вызываются на экран дисплея 20, а при необходимости - на принтер (на фиг.1 он не показан).
Поменяв режим переменного сопротивления устройства, спортсмен повторяет двигательные действия и компьютерные операции в указанных выше повторах и подходах с акцентом на максимальную начальную скорость. И так во всех четырех режимах переменного сопротивления или выбранном тренером режиме.
Устройство позволяет развивать соответствующие группы мышц при борьбе правой и левой руками. Для этого достаточно спортсмену перейти на другую сторону устройства, подстроив перед этим узел переменного сопротивления или оставив его неизменным.
В заявляемом устройстве несколько нестандартных узлов. Рассмотрим основные из них, уделив внимание их конструкции и принципу действия, электрической схеме (если она есть) и участию в работе всего устройства.
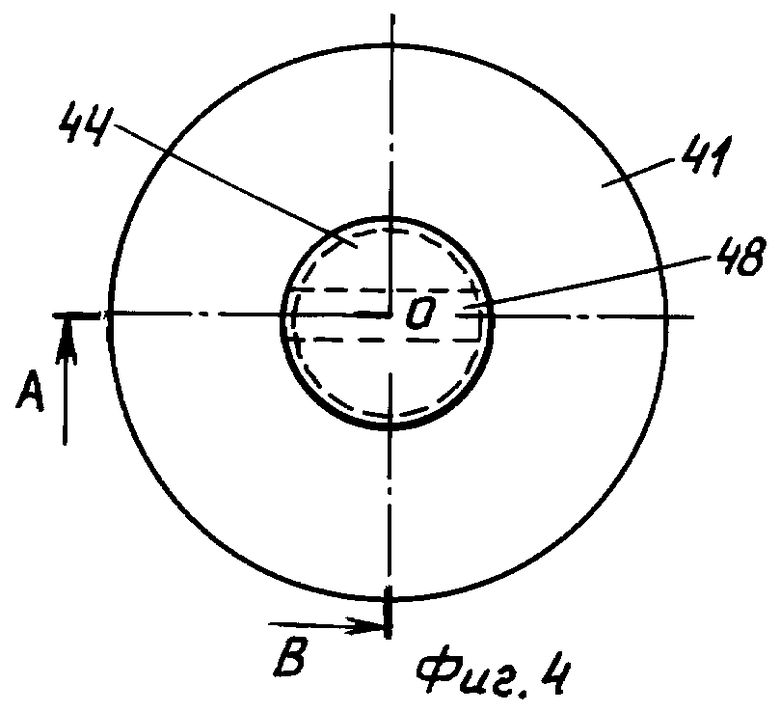
Миниатюрная стойка с плавной регулировкой перемещения ее подвижной части, 28 и 29. Одна из возможных конструкций этой стойки представлена на фиг.3 и 4, где на фиг.3 показан вид спереди, а на фиг.4 - вид сверху. Миниатюрная стойка с плавной регулировкой перемещения ее подвижной части, например, 28 содержит цилиндрическую регулировочную гайку 41, цилиндрический стакан с двумя резьбовыми отверстиями, патрубок 43, цилиндрический резьбовой стержень 44, шпилькой 45 обеспечивается только вращательное движение регулировочной гайки 41, шпилькой 46 и проточкой 47 на резьбовом стержне 44 достигается продольное перемещение этого стержня, а с помощью отверстия 48 в резьбовом стержне 44 обеспечивается закрепление на этой стойке элементов конструкции. Насечка 49 обеспечивает вращение регулировочной гайки 41.
Работают со стойкой следующим образом.
При вращении регулировочной гайки 41 в одном направлении резьбовой стержень 44 перемещают в выбранном направлении. При вращении регулировочной гайки 41 в противоположном направлении перемещение резьбового стержня 44 происходит в противоположном направлении.
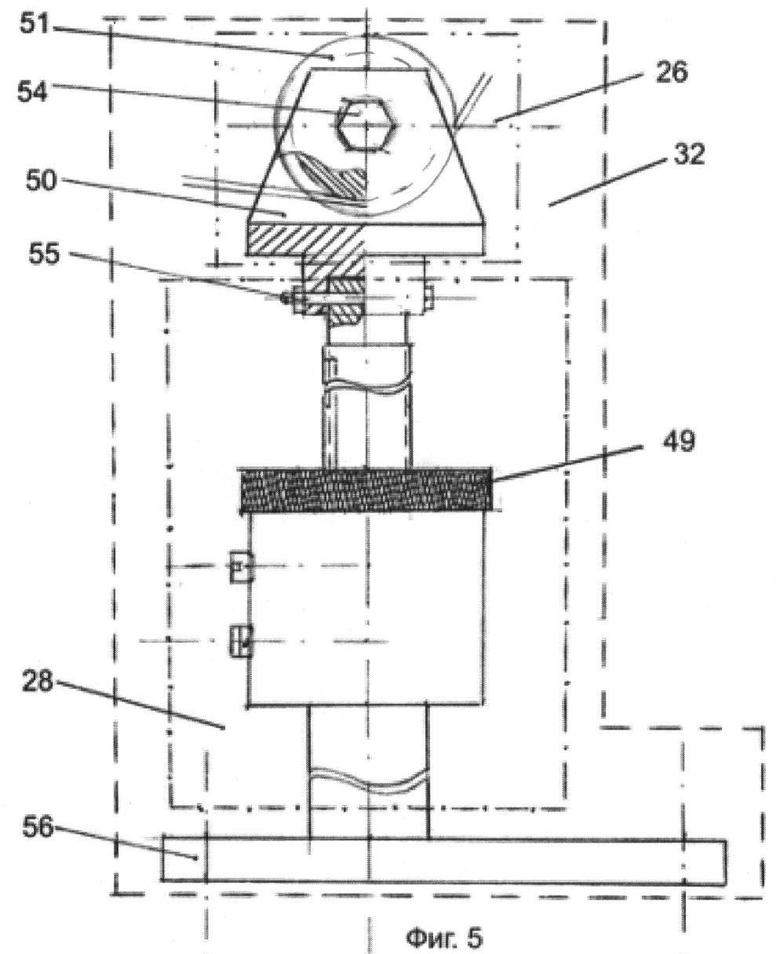
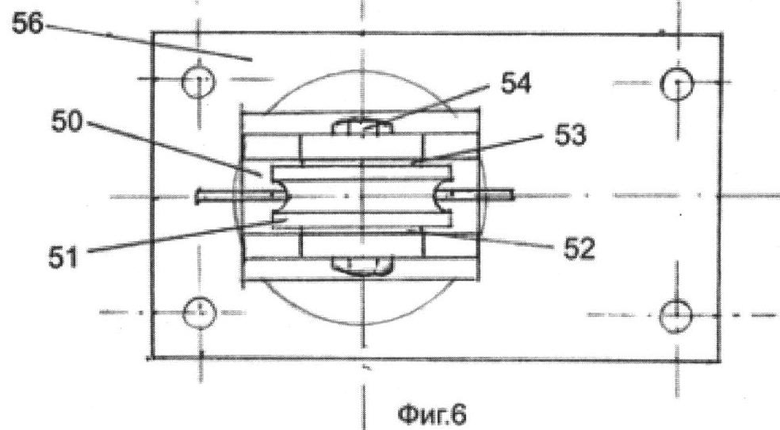
Узел точной выборки слабины троса 32. Одна из возможных конструкций этого узла, оконтуренного пунктирными линиями, показана на фиг.5 и 6, где на фиг.5 представлен вид спереди, а на фиг.6 - вид сверху. Узел точной выборки слабины троса 32 (оконтурен штрихпунктирными линиями) установлен на платформе и содержит миниатюрную стойку с плавной регулировкой перемещения подвижной части 28, дополнительный блочек 26, оконтуренный дважды штриховой и пунктирной линиями и состоящий из щечек 50, колесика 51, двух бронзовых шайб 52, 53 и оси 54, болт с гайкой 55 для фиксации блочка 26 на миниатюрной стойке с плавной регулировкой перемещения подвижной части 28 и фланец 56, на котором установлена указанная стойка и с помощью которой данный узел крепится к платформе 38.
Работают с данным узлом следующим образом.
Вращая регулировочную гайку 49 миниатюрной стойки с плавной регулировкой перемещения ее подвижной части 28, поднимают или опускают дополнительный блочек 26, тем самым выбирая слабину троса перед началом двигательного действия.
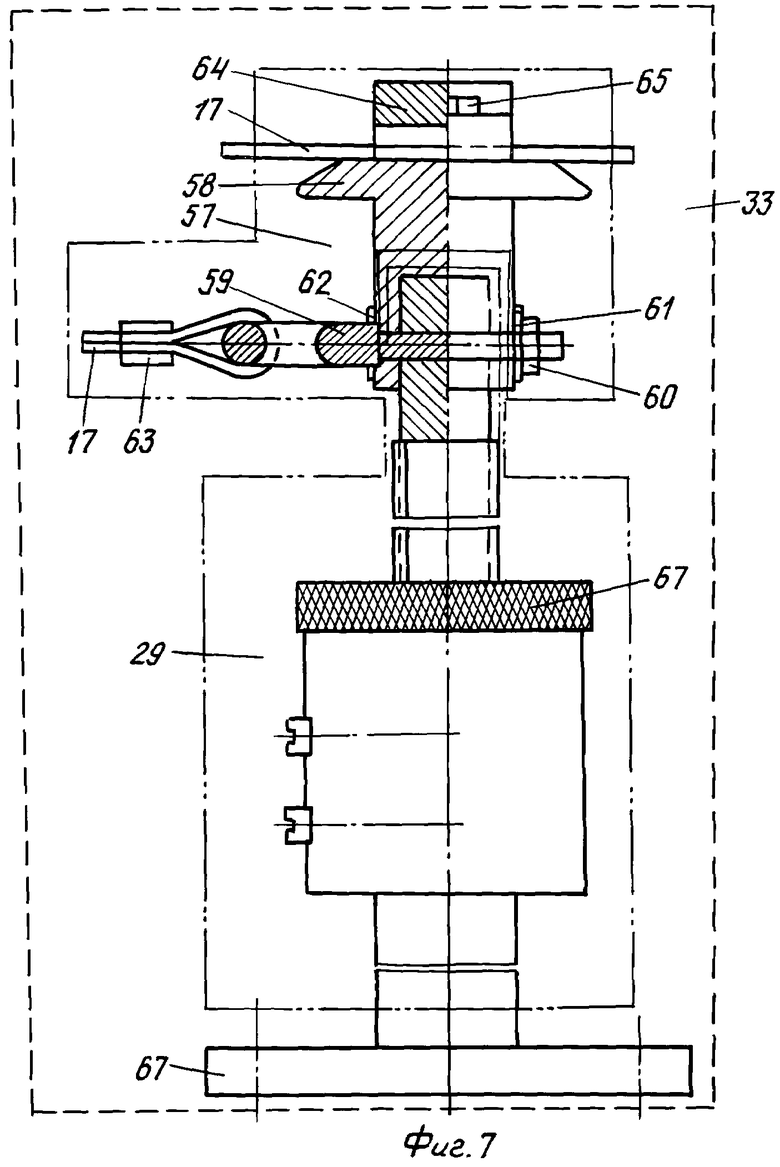
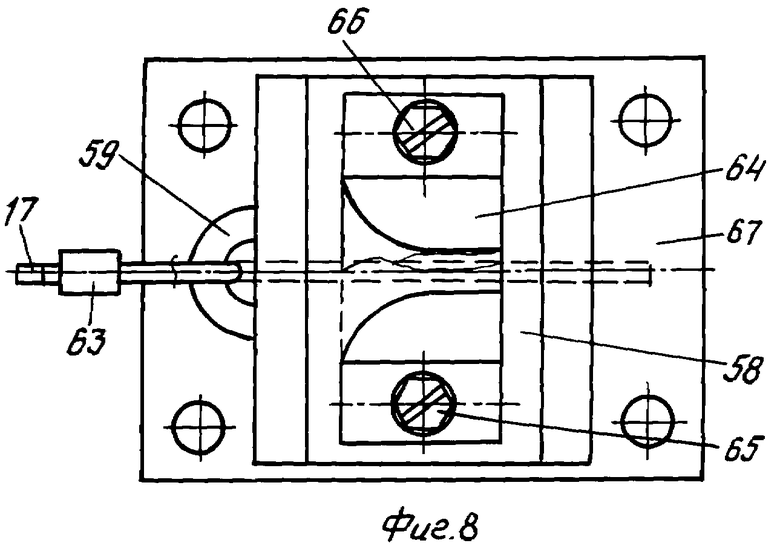
Узел настройки троса 33. Этот узел является опорным, так как относительно него совершается перемещение узла регулировки под руку спортсмена 34 (см. фиг.1). Одна из возможных конструкций этого узла показана на фиг.7, 8 (оконтурена пунктирными линиями), где на фиг.7 представлен ее вид спереди, а на фиг.8 - вид сверху. Узел настройки троса 33 установлен на платформе 38 и содержит оконтуренную штрихпунктирными линиями миниатюрную стойку с плавной регулировкой перемещения подвижной части 29 и зафиксирован на ней фиксирующим болтом 59, имеющим свободное вращение, задаваемое гайкой 60 и шайбами 61 и 62. Фиксирующий болт 59 имеет кольцевой элемент, к которому крепится трос 17 с помощью замка 63. Ограничительный направляющий элемент 64 прикреплен к столику 58 двумя винтами 65, 66. Миниатюрная стойка с плавной регулировкой перемещения подвижной части 29 установлена на фланец 67, который крепится к платформе 38.
Работают с данным узлом следующим образом.
Вращая регулировочную гайку 67 миниатюрной стойки с плавной регулировкой перемещения ее подвижной части 29, поднимают или опускают трос 17, подстраиваясь к руке спортсмена перед двигательным действием.
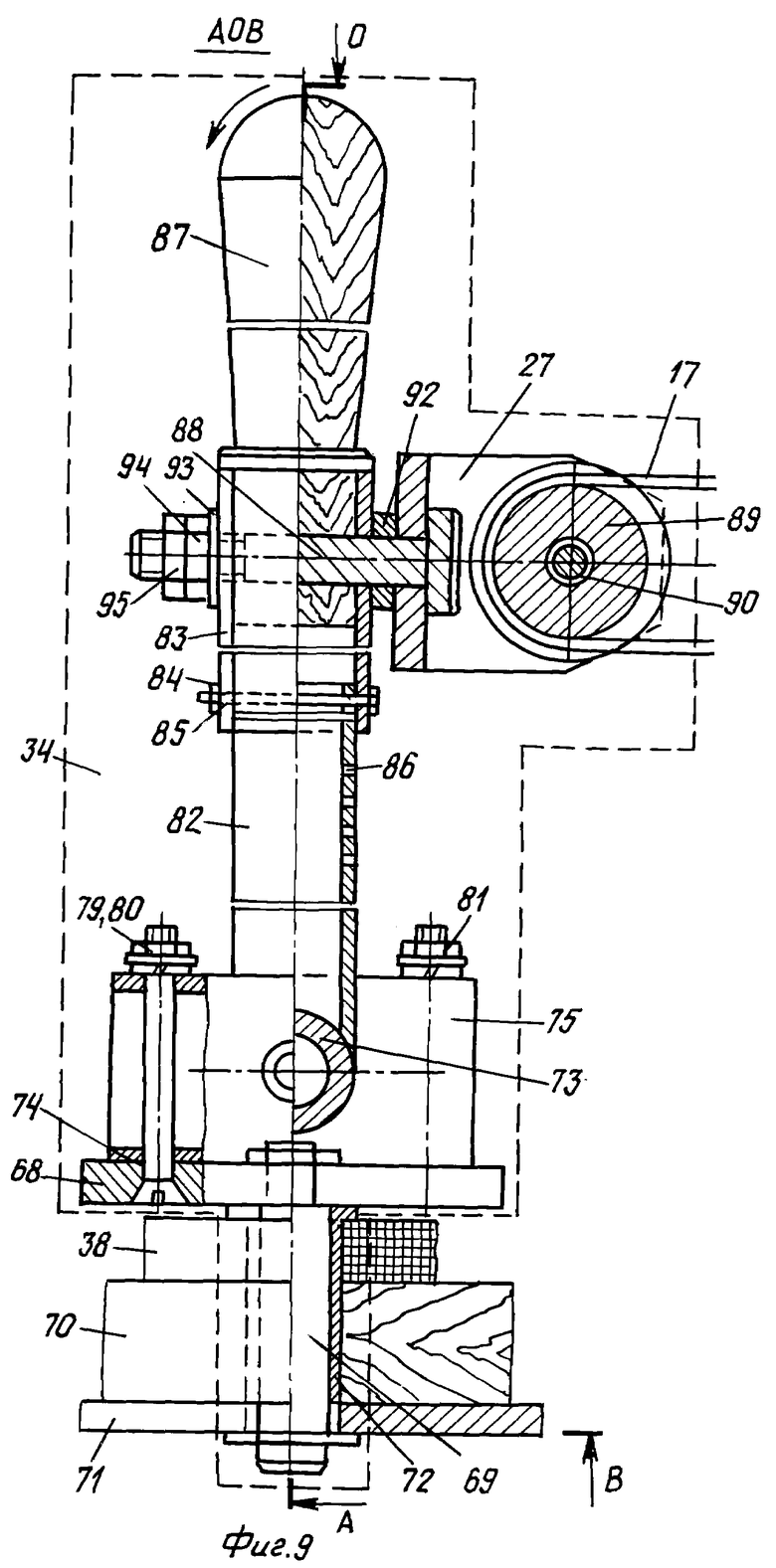
Узел регулирования под руку спортсмена 34. Данный узел является фактически исполнительным узлом в устройстве (см. фиг.1). Одна из возможных конструкций этого узла (оконтурена пунктирными линиями) показана на фиг.9, 10, где на фиг.9 представлен вид спереди, на фиг.10 - вид сбоку справа. Узел 34 содержит основание 68, со встроенной в него осью 69, с помощью которой обеспечивается поворот основания 68 в горизонтальной плоскости и крепление этого основания к столу для армрестлинга 3 посредством подшипника скольжения 72, выполненного из бронзы или латуни, трубчатую цилиндрическую ось 73, закрепленную на основании 68 двумя колодочками 74 и 75, в которых имеются подшипники скольжения латунные или бронзовые 76 и 77 (см. фиг.10). Колодочки 74 и 75 прикреплены к основанию 68 четырьмя винтами с гайками (по два на каждую колодочку) 78 и 79, 80 и 81. Перпендикулярно к трубчатой оси 73 прикреплен, например сваркой, квадратный патрубок 82, образующий с квадратным патрубком 83 большего поперечного сечения телескопическую стойку с изменением и фиксированием длины, обеспечиваемым посредством болта с гайкой 84, одного сквозного отверстия 85 в большом патрубке 83 и нескольких сквозных отверстий 86 в малом патрубке 82. Трубчатая ось 73 с патрубками 82 и 83 обеспечивает перемещение рычага, образованного этими патрубками и рукояткой 87, в вертикальной плоскости. В большем патрубке 83 и рукоятке 87 перпендикулярно плоскости, в которой размещена трубчатая ось 73, сделано сквозное отверстие, в которое вставлен болт 88, которым к большему патрубку 83 прикреплены щечки блочка 27 (см. фиг.1), на которых размещено колесико 89, посаженное через латунный или бронзовый подшипник скольжения 90, и винт с гайкой 91, являющийся осью блочка 27. С помощью шайб 92 и 93 и гайки 94 обеспечивается свободное вращение щечек и блочка 27 в целом. Контргайкой 95 фиксируется это вращение. С помощью блочка 27 и крепления конца троса 17 на кольцевом элементе фиксирующего болта 59 узла настройки троса 33 организуется полиспаст, который расширяет возможности устройства, а с помощью цилиндрической планки 96 с отверстием (см. фиг.16), прикрепленной к трубчатой оси 73, организуется посадочное место для переменного резистора - датчика пути упомянутого рычага, прикрепляемого к одной из колодочек.
Работают с данным узлом следующим образом.
Болт 84 извлекают из патрубков 82 и 83. Передвигая патрубок 83, добиваются удобного положения руки спортсмена и болтом 84 фиксируют это положение узла регулировки под руку спортсмена 34.
Стол для армрестлинга 3. Данный узел, а именно стол для проведения борьбы руками, должен быть оборудован в соответствии с международными правилами [4, С.15, 4]. Одна из возможных конструкций примененного узла (оконтурена пунктирными линиями) показана на фиг.11, 12, 13, где на фиг.11 представлен вид спереди, на фиг.12 - вид сверху и на фиг.13 - вид сбоку слева. Узел 3 содержит раму 71 (металлический каркас, например, сварной трубчато-уголковый), на котором размещена столешница 70, а на ней - платформа 38 из прочного, плотного не коробящегося материала. На раме 71 закреплен штырь 97, а на столешнице 70 - щиток 98 и два подлокотника 99 и 100 и строго в центре столешницы 70 выполнено отверстие 101 для подшипника скольжения 72. Для крепления телескопической стойки 2 к столу для армрестлинга 3 предусмотрены две шпильки 102 и 103 и выступ на платформе 38. В раме 71 предусмотрены два сиденья 104 и 105, слева и справа стола, а могут сиденья отсутствовать (для борьбы стоя).
Пользуются данным узлом следующим образом.
Спортсмен, правша или левша, становится с той стороны стола, которая отвечает его физическим свойствам, и свободной рукой осуществляет захват штыря. В случае необходимости спортсмен переходит на другую сторону стола.
Силовой датчик 16. Существует несколько способов измерения силы: на основе тензометрического моста, на основе динамометра и др. Одна из возможных конструкций силового датчика 16, построенного, например, на основе динамометра, показана на фиг.14, а его электрическая принципиальная схема - на фиг.15. Силовой датчик 16 включает в себя основание 106, пружинный динамометр 107, потенциометр 108 с линейным перемещением его движка, сочлененного с показателем (стрелкой пружинного динамометра 107), параметрический стабилизатор напряжения, состоящий из стабилитрона 109 и гасящего резистора 110, размещенных на электроизолированных втулках 111, 112, 113, и работоспособен силовой датчик 16 при наличии АЦП 35, системного блока 19 персонального компьютера 18, соответствующего программного обеспечения и источника стабилизированного электропитания 37.
Работает силовой датчик 16 следующим образом.
Как работает пружинный динамометр 107 известно и очевидно из фиг.14. Только перед началом измерений инженер-исследователь тарирует силовой датчик 16 с помощью образцового динамометра и проверяет работоспособность АЦП 35, системного блока 19, программного обеспечения, управляющего работой данного узла, и источника стабилизированного электропитания 37. Убедившись в правильной работоспособности данного узла, смежных с ним узлов и программного обеспечения, инженер-исследователь переходит к проверке работоспособности других узлов.
Датчик перемещения троса 31. Существует несколько методов измерения перемещения объектов, как прямых, так и косвенных. Прямой метод измерения перемещения троса достаточно трудоемок и неудобен. Несколько проще косвенный метод измерения по перемещению рычага, но он связан с вычислениями. Проще измерить угол вращения узла регулировки под руку спортсмена 34 и сразу ввести результат в системный блок 19. Одна из возможных конструкций датчика перемещения троса 31, построенного на косвенном методе измерения, показана на фиг.16 (вид спереди) и 17 (вид сбоку слева). Датчик перемещения троса 31 включает основание 114 из электроизоляционного материала, потенциометр 115 с круговым линейным перемещением движка 116 этого потенциометра, сочлененного с трубчатой осью 73 с помощью лыски на оси движка 116 и круговой планки 96 с соответствующим отверстием, параметрический стабилизатор напряжения, состоящий из стабилитрона 117 и гасящего резистора 118, размещенных на элетроизолирующих втулках 119, 120, 121 и 122. Датчик перемещения троса 31 работает при наличии АЦП 36, системного блока 19, входящего в персональный компьютер 18, соответствующего программного обеспечения и источника стабилизированного электропитания 37.
Работает датчик перемещения троса 31 следующим образом.
Запитан потенциометр 115 стабилизированным напряжением от стабилитрона 117, и выходной сигнал его пропорционален положению движка 116, связанного с трубчатой осью 73. Перед началом измерений инженер-исследователь тарирует датчик перемещения троса 31 и проверяет наличие сигнал от этого датчика на АЦП 36 и в системный блок 19 персонального компьютера 18.
Программное обеспечение. С его помощью осуществляется выполнение физических упражнений. При этом программное обеспечение состоит из комплекса программ. В комплекс программ, например, автоматической обработки информации с периферийных силового датчика 16 и датчика перемещения троса 31 входят следующие программы: автоматический ввод и регистрация данных, предварительная обработка сигналов (сглаживание), тарировка входных сигналов, вывод графического изображения входных сигналов, математическая обработка характеристик выполняемых физических упражнений.
Программа математической обработки характеристик выполняемого физического упражнения позволяет выполнить расчет следующих биомеханических параметров: длительности всего движения и отдельных его фраз и периодов, величины перемещения, скорости и ускорения движения, выполненной работы во время одного движения и серии (нескольких) движений.
По сравнению с прототипом предлагаемое устройство позволяет повысить качество обучение начинающих спортсменов-армрестлеров благодаря освоению ими правильного движения руки и туловища в самом начале тренировочного процесса при минимальных затратах энергетических ресурсов и в условиях различных режимов переменного сопротивления. Устройство также позволяет подготовленным спортсменам-армрестлерам использовать его как спарринг-партнера в тренировочном процессе.
Источники информации
1. Hobby J.M. Pat. US №3947025. Arm wrestling. - Publ. 30.03.76.
2. Подготовка армрестлеров с использованием безынерционного тренажера управляющего воздействия. / М.М.Эбзеев, В.Г.Свечкарев, А.М.Базоркин, Э.Э.Кочкаров. - М., 2006. - С.4, 8.
3. Математическая модель узла переменного сопротивления машины безынерционного управляющего воздействия. / В.Г.Свечкарев, С.В.Поляков, М.М.Эбзеев, Э.Э.Кочкаров // Теория и практика физической культуры. - 2007. - №3. - С.78-79.
4. Ахмедшин И.Г., Живора Г.В. Правила соревнований по борьбе руками. - Мю, 1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ-АРМРЕСТЛЕРОВ | 2008 |
|
RU2385172C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2014 |
|
RU2556540C1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2006 |
|
RU2319217C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОПРЕДЕЛЕНИЯ ТРАЕКТОРИИ ДВИЖЕНИЯ ШТАНГИ И БИОМЕХАНИЧЕСКИХ ХАРАКТЕРИСТИК ДВИГАТЕЛЬНЫХ ДЕЙСТВИЙ ТЯЖЕЛОАТЛЕТА | 2008 |
|
RU2403937C2 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2010 |
|
RU2411978C1 |
| УСТРОЙСТВО С ЭЛЕКТРОПРИВОДОМ ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2007 |
|
RU2344863C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПРИНТЕРОВ И ФУТБОЛИСТОВ | 2005 |
|
RU2297866C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ НОГ | 2009 |
|
RU2408404C1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2008 |
|
RU2378030C1 |
| УСТРОЙСТВО ДЛЯ СОПРЯЖЕННОГО ВЗАИМОЗАВИСИМОГО РАЗВИТИЯ ФИЗИЧЕСКИХ И ИНТЕЛЛЕКТУАЛЬНЫХ СПОСОБНОСТЕЙ РЕБЕНКА | 2010 |
|
RU2479254C2 |

Изобретение относится к спортивным тренажерам, в частности к устройствам для обучения и тренировки начинающих спортсменов-армрестлеров и тренировки подготовленных спортсменов. Устройство содержит телескопическую стойку, механически связанную со столом для армрестлинга, к которой прикреплены два рычага: нижний, расположенный перпендикулярно стойке, и верхний рычаг, снабженный фиксирующей втулкой. На верхнем торце телескопической стойки закреплен блок, при этом как нижний, так и верхний рычаги снабжены отверстиями для закрепления пружин. Также устройство включает в себя трособлочную систему, трос, который перекинут через упомянутый блок, рукоятку, за которую спортсмен тянет трос на тренировке, силовой датчик, с помощью которого измеряется и фиксируется натяжение троса. Регулировка натяжения троса изменяется за счет того, что один конец троса прикреплен через силовой датчик к верхнему рычагу, а сам трос огибает блок, первый и второй дополнительный блочки, проходит через направляющую узла настройки троса, огибает третий дополнительный блочек, закрепленный с возможностью вращения в узле регулировки под руку спортсмена, и вторым концом трос закреплен на узле настройки троса, при этом резисторный датчик перемещения троса, расположенный на механической миниатюрной стойке дискретного перемещения верхнего элемента, жестко сочленен с торцом вращающейся горизонтальной осью этой стойки. Технический результат заключается в повышении качества обучения спортсменов-армрестлеров за счет минимальной затраты энергоресурсов при различных режимах переменного сопротивления. 7 з.п. ф-лы, 17 ил.
1. Устройство для обучения и тренировки спортсменов-армрестлеров, содержащее телескопическую стойку, механически связанную со столом для армрестлинга, к которой прикреплены два рычага: нижний, расположенный перпендикулярно стойке и посаженный на втулку с фиксатором таким образом, что его можно перемещать вверх или вниз по телескопической стойке и фиксировать его положение, а верхний рычаг, снабженный фиксирующей втулкой, посажен на ось и его можно перемещать, поднимать, переводя из горизонтального положения, задаваемого передвижным фиксатором, в вертикальное, а на верхнем торце телескопической стойки закреплен блок, который можно поднимать или опускать, фиксируя телескопическую стойку на разной длине, при этом как нижний, так и верхний рычаги снабжены отверстиями для закрепления пружин, трособлочную систему, трос, который перекинут через упомянутый блок, рукоятку, за которую спортсмен тянет трос на тренировке, силовой датчик, встроенный в разрыв троса, и с помощью которого измеряется и фиксируется натяжение троса, кроме того, в нем имеется компьютер и датчик перемещения троса, отличающееся тем, что в него введены: платформа, три дополнительных блочка, две миниатюрных механических стойки с плавной регулировкой перемещения подвижной их части, одна механическая миниатюрная стойка с дискретным перемещением верхнего элемента - рукоятки и с возможностью поворота вокруг горизонтальной и вертикальной осей, резисторный датчик перемещения троса, узел настройки троса, узел регулировки под руку спортсмена, узел точной выборки слабины троса, два аналого-цифровых преобразователя (АЦП) и стабилизированный источник электропитания, причем в устройстве один конец троса прикреплен через силовой датчик к упомянутому верхнему рычагу, а сам трос огибает упомянутый блок, первый и второй дополнительный блочки, проходит через направляющую узла настройки троса, огибает дополнительный третий блочек, закрепленный с возможностью вращения в узле регулировки под руку спортсмена, и вторым концом трос закреплен на узле настройки троса, при этом резисторный датчик перемещения троса, расположенный на механической миниатюрной стойке дискретного перемещения верхнего элемента, жестко сочленен с торцом вращающейся горизонтальной оси этой стойки и подсоединен электрически через первый АЦП к внутренней шине системного блока ПК, а силовой датчик через второй АЦП подключен электрически к той же внутренней шине системного блока ПК, и запитаны они от стабилизированного источника электропитания, а программное обеспечение задает работу этих периферийных датчиков, работу устройства в целом и содержит комплекс программ, обеспечивающих выполнение всех математических работ в устройстве.
2. Устройство по п.1, отличающееся тем, что в нем миниатюрная стойка с плавной регулировкой перемещения ее подвижной части содержит цилиндрическую регулировочную гайку, цилиндрический стакан с двумя резьбовыми отверстиями, патрубок цилиндрический с одним боковым отверстием, цилиндрический резьбовой стержень с проточкой по всей длине стержня и отверстием в верхней его части для закрепления на нем элементов и две шпильки, одна из которых обеспечивает вращательное движение регулировочной гайки, а вторая - возвратно-поступательное движение резьбового стержня.
3. Устройство по п.1, отличающееся тем, что в нем узел точной выборки слабины троса установлен на платформе и содержит миниатюрную стойку с плавной регулировкой перемещения подвижной ее части, дополнительный блочек, закрепленный на цилиндрическом резьбовом стержне стойки посредством болта с гайкой, и фланец, с помощью которого крепится данная стойка к платформе.
4. Устройство по п.1, отличающееся тем, что в нем узел настройки установлен на платформе и содержит миниатюрную стойку с плавной регулировкой перемещения подвижной части и средство воздействия на трос, состоящее из столика, по которому скользит трос и который надет на подвижную часть указанной миниатюрной стойки и зафиксирован на ней фиксирующим болтом, имеющим свободное вращение, задаваемое гайкой и двумя шайбами, при этом фиксирующий болт имеет кольцевой элемент, к которому крепится трос с помощью замка, а ограничительно-управляющий элемент прикреплен к столику двумя винтами, и данная стойка установлена на фланец, который крепится к платформе.
5. Устройство по п.1, отличающееся тем, что в нем узел регулирования под руку спортсмена содержит основание со встроенной в него осью, с помощью которой обеспечивается поворот основания в горизонтальной плоскости и крепления этого основания к столу для армрестлинга через платформу, столешницу и металлический каркас стола для армрестлинга посредством подшипника скольжения, трубчатую цилиндрическую ось, закрепленную на упомянутом основании двумя колодочками, в которых имеются подшипники скольжения, при этом колодочки прикреплены к основанию четырьмя винтами с гайками по два на каждую колодочку, а к трубчатой оси перпендикулярно к ней прикреплен квадратный патрубок, образующий с квадратным патрубком большего поперечного сечения телескопическую стойку с изменением и фиксированием ее длины, обеспечиваемой посредством болта с гайкой, одного сквозного отверстия в патрубке с большим поперечным сечением и n-го количества сквозных отверстий в патрубке меньшего поперечного сечения, причем трубчатая ось с патрубками обеспечивает перемещение рычага, образованного этими патрубками и рукояткой, в вертикальной плоскости, а в патрубке большего поперечного сечения и рукоятке перпендикулярной плоскости, в которой размещены трубчатая ось, сделано сквозное отверстие, в которое вставлен болт, которым к патрубку большего поперечного сечения прикреплены щечки блочка, на которых размещено колесико, посаженное через подшипник скольжения и винт с гайкой, являющийся осью этого блочка, а с помощью двух шайб и одной гайки обеспечивается свободное вращение щечек и данного блочка в целом, которое фиксируется контргайкой, данный блочек огибается тросом и с помощью этого блочка и крепления конца троса на кольцевом элементе фиксирующего болта узла настройки троса организуется полиспаст, который расширяет возможности устройства, а с помощью цилиндрической планки с отверстием, прикрепленной к трубчатой оси, организуется посадочное место для переменного резистора - датчика пути упомянутого рычага, прикрепляемого к одной из колодочек.
6. Устройство по п.1, отличающееся тем, что стол для армрестлинга содержит также платформу из прочного, плотного некоробящегося материала, один штырь, один щиток и строго по центру столешницы - отверстие в платформе, в столешнице и раме стола для подшипника скольжения, а для крепления телескопической стойки к столу предусмотрены две шпильки.
7. Устройство по п.1, отличающееся тем, что в нем силовой датчик содержит основание, пружинный динамометр, потенциометр с линейным перемещением его движка, сочлененный со стрелкой пружинного динамометра и запитанный от параметрического стабилизатора напряжения, состоящего из стабилитрона и гасящего сопротивления, и информационный выход потенциометра через аналого-цифровой преобразователь соединен с системным блоком персонального компьютера.
8. Устройство по п.1, отличающееся тем, что в нем датчик перемещения троса содержит основание из электроизоляционного материала, потенциометр с круговым линейным перемещением движка этого потенциометра, сочлененного с трубчатой осью с помощью лыски на оси движка и круговой планки с соответствующим отверстием, параметрический стабилизатор напряжения, состоящий из стабилитрона и гасящего резистора, размещенных на электроизоляционных втулках.
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ И ДЛЯ ОПРЕДЕЛЕНИЯ И РАЗВИТИЯ КОНДИЦИОННЫХ И КООРДИНАЦИОННЫХ СПОСОБНОСТЕЙ ЧЕЛОВЕКА | 2007 |
|
RU2349359C2 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ И ОБУЧЕНИЯ НАЧИНАЮЩИХ ТЯЖЕЛОАТЛЕТОВ | 2007 |
|
RU2365397C2 |
| US 6260783 B1, 17.07.2001 | |||
| WO 2008045614 A2, 17.04.2008. | |||

