Предлагаемое техническое решение относится к устройствам охранной сигнализации, которые обеспечивают кратковременное замыкание контролируемой электрической цепи под воздействием импульса силы при ударе или взломе охраняемой поверхности, а также в качестве инерционной кнопки для запуска таймера технологических процессов, например обеззараживания питьевой воды в полевых условиях с помощью ионов серебра.
Основные способы управления герконом одним или несколькими постоянными магнитами при линейном и угловом перемещении относительно геркона, изложены в книге [1], используются в датчиках устройств охранной сигнализации.
Наиболее близким к предлагаемому техническому решению является инерционный электроконтактный датчик для устройства сигнализации [2]. Датчик содержит геркон замыкающего типа, цилиндрический магнит, намагниченный вдоль оси цилиндра, демпфирующую прокладку и корпус, состоящий из трех пластин с соосными отверстиями для неподвижной установки геркона, в средней пластине расположен закрытый паз, предназначенный для свободного перемещения магнита. Продольная ось паза перпендикулярна продольной оси геркона, а конец паза, в котором установлена демпфирующая прокладка, находится вблизи геркона и относительно горизонтальной линии расположен на меньшей высоте, чем другой конец паза.
Датчик устанавливается на охраняемой поверхности, например стеклянный проем в окне, в строго ориентированном положении, обеспечивающем подкат постоянного магнита к демпфирующей прокладке и замыкание контакт - деталями геркона контролируемой электрической цепи. Под воздействием импульса силы при ударе о стекло постоянный магнит откатывается от геркона, вызывая кратковременное размыкание контролируемой цепи, и после окончания импульса силы под воздействием силы веса магнит возвращается по наклонному пазу в исходное положение, а прокладка уменьшает скорость подката магнита к геркону, исключая помехи контролируемой цепи.
Основным недостатком данного датчика является необходимость строгой ориентации датчика относительно вектора ускорения земного притяжения и связанные с этим ограничения на расположение охраняемых поверхностей. Датчик функционально непригоден для размещения на полу, потолке или наклонных поверхностях.
От этих недостатков свободен предлагаемый телесный датчик импульса силы, реагирующий на импульс силы, вектор которой может иметь любое направление в пределах телесного угла 4π стереорадиан.
Телесный датчик импульса силы содержит литой цилиндрический корпус из изоляционного материала с двумя разделенными центральной перегородкой глухими полостями, в одной из которых неподвижно размещается геркон замыкающего типа, а в другой полости, закрытой фасонной пробкой с отверстиями для выводов геркона, находятся два постоянных магнита цилиндрической формы с векторами намагниченности, направленными параллельно продольной оси геркона и для импульса силы, равного или превышающего силу веса одного из магнитов, с любым направлением вектора, находящегося в пределах поверхности шара с телесным углом 4π стереорадиан при совпадении продольной оси датчика с вектором импульса силы, постоянные магниты обращены одноименными полостями друг к другу и свободно перемещаются относительно геркона, при этом для исходного состояния при отсутствии импульса силы отношение величины допустимого смещения центра перекрытия контакт - деталей геркона относительно середины зазора между одноименными полюсами магнитов х к величине перекрытия контакт - деталей α в герконе ограничено пределами неравенства  , при допустимом отличии магнитов друг от друга по намагниченности не превышающем 20%. С учетом вектора ускорения земного притяжения угол наклона β0 продольной оси датчика к вектору импульса силы в пределах телесного угла 2π стереорадиан верхнего полушария определяется из выражения
, при допустимом отличии магнитов друг от друга по намагниченности не превышающем 20%. С учетом вектора ускорения земного притяжения угол наклона β0 продольной оси датчика к вектору импульса силы в пределах телесного угла 2π стереорадиан верхнего полушария определяется из выражения  , а в пределах телесного угла 2π стереорадиан нижнего полушария из выражения
, а в пределах телесного угла 2π стереорадиан нижнего полушария из выражения  ,
,
где  - угол наклона продольной оси датчика к вектору импульса силы для верхнего полушария,
- угол наклона продольной оси датчика к вектору импульса силы для верхнего полушария,
 - угол наклона продольной оси датчика к вектору импульса силы для нижнего полушария,
- угол наклона продольной оси датчика к вектору импульса силы для нижнего полушария,
 - максимально допустимое угловое несовпадение продольной оси датчика с вектором импульса силы в плоскости экватора, зависящее от соотношения модулей ускорений,
- максимально допустимое угловое несовпадение продольной оси датчика с вектором импульса силы в плоскости экватора, зависящее от соотношения модулей ускорений,
 - вектор ускорения импульса силы,
- вектор ускорения импульса силы,
 - вектор ускорения земного притяжения,
- вектор ускорения земного притяжения,
α° - угол наклона вектора импульса силы в плоскости сечения соответствующего меридиана к плоскости экватора, при этом исходное значение  , ограниченное неравенством
, ограниченное неравенством  , установлено для соотношения модулей ускорения импульса силы к ускорению земного притяжения, находящегося в пределах
, установлено для соотношения модулей ускорения импульса силы к ускорению земного притяжения, находящегося в пределах  .
.
Телесный датчик импульса силы отличается тем, что выводы геркона расположены с одного торца цилиндрического корпуса.
Телесный датчик импульса силы отличается тем, что выводы геркона направлены в противоположные торцы цилиндрического корпуса.
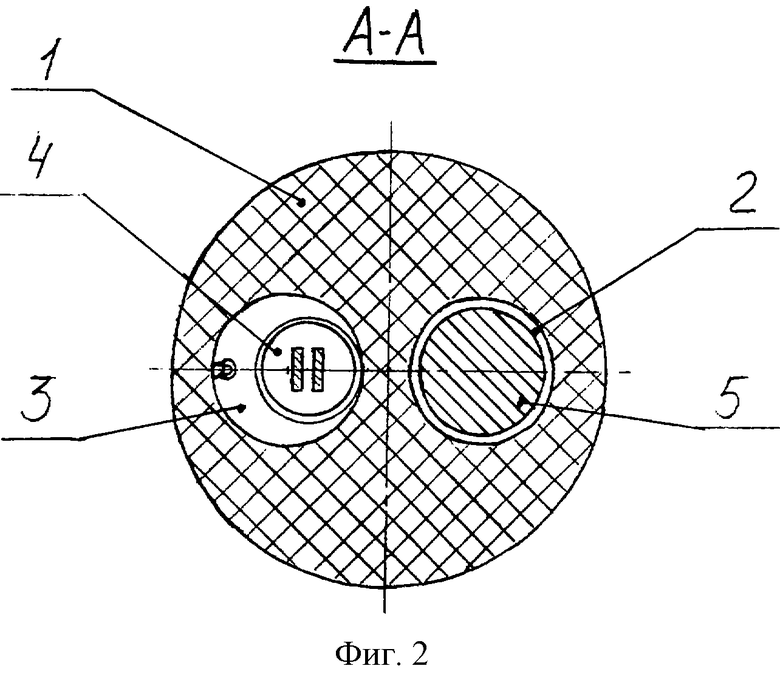
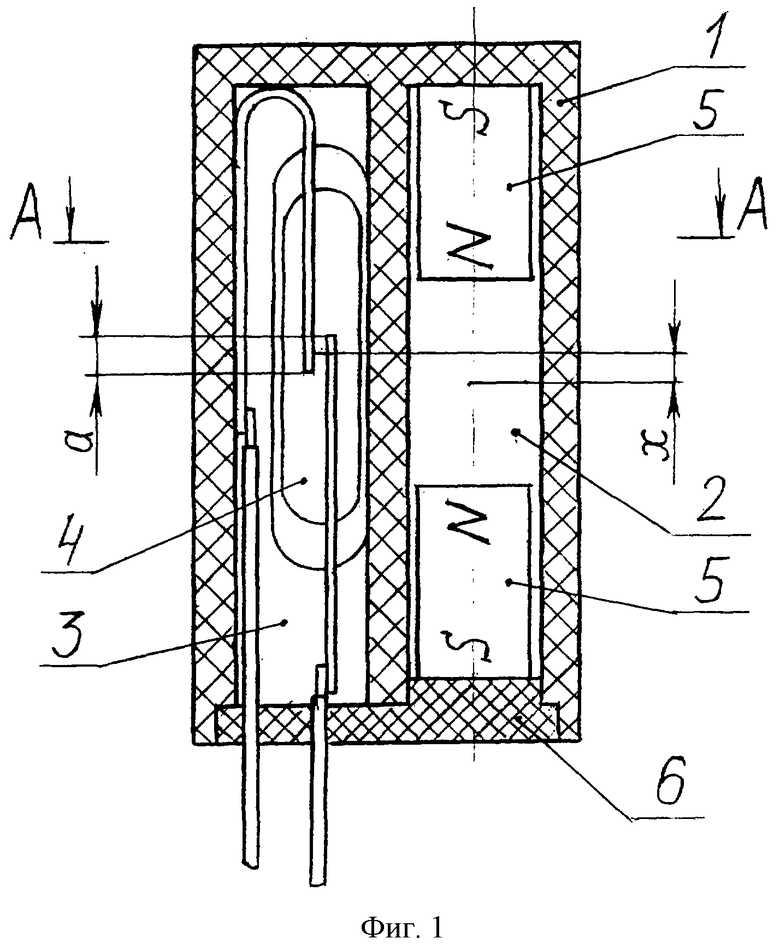
На фиг.1 и 2 соответственно в разрезе и сечении и фиг.5 представлена конструкция предлагаемого телесного датчика, а на фиг.3 и 4 приведены иллюстрации сложения векторов ускорения импульса силы и земного притяжения и углы допустимых несовпадений продольной оси датчика с вектором импульса силы.
Представленный на фиг.1, 5 телесный датчик импульса силы содержит корпус 1, в полостях 2 и 3 которого неподвижно размещен геркон 4 и подвижные постоянные магниты 5, опирающиеся в дно корпуса 1 и в фасонную пробку 6 с отверстиями для выводов геркона 4. Цилиндрические магниты 5, намагниченные вдоль продольной оси, установлены в полости 2 одноименными полюсами друг к другу и, отталкиваясь между собой, прижимаются к корпусу 1 и к пробке 6.
Телесный датчик импульса силы, представленный на фиг.5, имеет выводы геркона, направленные в противоположные торцы корпуса.
В исходном состоянии у замыкающего геркона 4 смещен центр перекрытия контакт - деталей α относительно центра зазора между одноименными полюсами магнитов 5 на расстояние х, а отношение х к α ограничено пределами неравенства  , если разница по намагниченности одного магнита относительно другого магнита не превышает 20%. При совпадении продольной оси датчика с вектором импульса силы один из магнитов 5, перемещаясь вдоль полости 2, вызывает замыкание контакт - деталей геркона 4. После окончания импульса силы, под действием силы отталкивания одноименных полюсов, магнит 5 возвращается в исходное положение, размыкая контакт - детали геркона 4. Каждый импульс силы вызывает однократное кратковременное замыкание контролируемой электрической цепи, в которую подключены контакт детали геркона 4.
, если разница по намагниченности одного магнита относительно другого магнита не превышает 20%. При совпадении продольной оси датчика с вектором импульса силы один из магнитов 5, перемещаясь вдоль полости 2, вызывает замыкание контакт - деталей геркона 4. После окончания импульса силы, под действием силы отталкивания одноименных полюсов, магнит 5 возвращается в исходное положение, размыкая контакт - детали геркона 4. Каждый импульс силы вызывает однократное кратковременное замыкание контролируемой электрической цепи, в которую подключены контакт детали геркона 4.
Датчик конструкции, представленной на фиг.1 и 5, обеспечивает устойчивое срабатывание на каждый импульс силы, вектор которого может иметь любое направление в пределах телесного угла 4π стереорадиан, если продольная ось датчика совпадает или параллельна вектору импульса силы, равной или превышающей силу веса одного из магнитов. Предложенная конструкция датчика исключает ложные срабатывания геркона из-за магнитного демпфирования одноименными полюсами постоянных магнитов 5.
На фиг.3 представлено меридианальное сечение шаровой поверхности с телесным углом 4π стереорадиан, образованной радиусом, равным вектору ускорения импульса силы  . Для верхнего полушария с телесным углом 2π стереорадиан сложение вектора ускорения импульса силы
. Для верхнего полушария с телесным углом 2π стереорадиан сложение вектора ускорения импульса силы  с углом наклона α° к плоскости экватора с вектором ускорения земного притяжения
с углом наклона α° к плоскости экватора с вектором ускорения земного притяжения  , представленное на фиг.3 во втором квадранте меридианального сечения, вектор результирующего ускорения, воздействующего на датчик, определяется из выражения
, представленное на фиг.3 во втором квадранте меридианального сечения, вектор результирующего ускорения, воздействующего на датчик, определяется из выражения  . Для нижнего полушария с телесным углом 2π стереорадиан, вектор результирующего ускорения, воздействующего на датчик, определяется из выражения
. Для нижнего полушария с телесным углом 2π стереорадиан, вектор результирующего ускорения, воздействующего на датчик, определяется из выражения  , как показано на фиг.3 для четвертого квадранта меридианального сечения.
, как показано на фиг.3 для четвертого квадранта меридианального сечения.
Если соотношение модулей ускорения импульса силы и ускорения земного притяжения находится в пределах  , то датчик устойчиво работает в плоскости экватора при угловом несовпадении продольной оси датчика с вектором ускорения импульса силы
, то датчик устойчиво работает в плоскости экватора при угловом несовпадении продольной оси датчика с вектором ускорения импульса силы  , как показано на Фиг.4, ограниченного неравенством
, как показано на Фиг.4, ограниченного неравенством  , пределы которого пропорциональны соотношению модулей ускорения импульса силы и ускорению земного притяжения. Исходя из вышеизложенного, допустимый угол наклона β° продольной оси датчика к вектору импульса силы в пределах телесного угла 2π стереорадиан для верхнего полушария определяется из эмпирического выражения
, пределы которого пропорциональны соотношению модулей ускорения импульса силы и ускорению земного притяжения. Исходя из вышеизложенного, допустимый угол наклона β° продольной оси датчика к вектору импульса силы в пределах телесного угла 2π стереорадиан для верхнего полушария определяется из эмпирического выражения  , а в пределах телесного угла 2π стереорадиан для нижнего полушария из выражения
, а в пределах телесного угла 2π стереорадиан для нижнего полушария из выражения  , где, как показано на фиг.4,
, где, как показано на фиг.4,
 - угол наклона продольной оси датчика к вектору ускорения импульса силы для верхнего полушария,
- угол наклона продольной оси датчика к вектору ускорения импульса силы для верхнего полушария,
 - угол наклона продольной оси датчика к вектору ускорения импульса силы для нижнего полушария,
- угол наклона продольной оси датчика к вектору ускорения импульса силы для нижнего полушария,
 - допустимое угловое несовпадение продольной оси датчика с вектором ускорения импульса силы в плоскости экватора, зависящее от соотношения модулей ускорений,
- допустимое угловое несовпадение продольной оси датчика с вектором ускорения импульса силы в плоскости экватора, зависящее от соотношения модулей ускорений,
 - вектор ускорения импульса силы,
- вектор ускорения импульса силы,
 - вектор ускорения земного притяжения,
- вектор ускорения земного притяжения,
α - угол наклона вектора ускорения импульса силы к плоскости экватора в сечении через соответствующий меридиан.
Датчик, представленный на фиг.1 и 2, работает следующим образом. Торец корпуса 1 (без выводов) закрепляется на охраняемой поверхности, а выводы геркона 4 подсоединяются к клеммам контролируемой электрической цепи. Контролируемая поверхность может иметь любое пространственное расположение в пределах телесного угла 4π стереорадиан. Под воздействием удара на охраняемую поверхность происходит перемещение магнита 5, расположенного вблизи охраняемой поверхности, вдоль полости 2, вызывая изменения распределения магнитного поля системы из геркона 4 и двух магнитов 5, намагниченных вдоль оси и направленных друг к другу одноименными полюсами. В результате этого центр перекрытия контакт - деталей разомкнутого геркона 4 из области с низкой напряженностью магнитного поля, недостаточной для срабатывания геркона 4, кратковременно попадает в область с большой напряженностью магнитного поля, вызывающей однократное срабатывание геркона 4 и протекание импульса тока по контролируемой цепи, регистрируемого и используемого специальной охранной системой. После окончания ударной нагрузки (импульса силы) под действием силы отталкивания одноименных полюсов магнит 5 возвращается в исходное положение, размыкая геркон 4. Если датчик установлен на немагнитной охраняемой поверхности, например стекле, то устойчивое срабатывание геркона 4, имеющего магнитодвижущую силу срабатывания в пределах (10-15) А, наблюдается при соотношении модуля ускорения импульса силы при ударе о стекло  к модулю ускорения земного притяжения
к модулю ускорения земного притяжения  , находящегося в пределах
, находящегося в пределах  , если продольная ось датчика параллельна или совпадает с вектором ускорения импульса силы. При установке датчика на ферромагнитную охраняемую поверхность, например на корпус автомобиля, для сохранения его чувствительности между ферромагнитной охраняемой поверхностью и торцом датчика устанавливается неферромагнитная прокладка, не гасящая ударное воздействие.
, если продольная ось датчика параллельна или совпадает с вектором ускорения импульса силы. При установке датчика на ферромагнитную охраняемую поверхность, например на корпус автомобиля, для сохранения его чувствительности между ферромагнитной охраняемой поверхностью и торцом датчика устанавливается неферромагнитная прокладка, не гасящая ударное воздействие.
Толщина прокладки зависит от месторасположения датчика на корпусе автомобиля (влияние окружающих ферромагнитных масс) и определяется опытным путем.
Кроме охранной сигнализации предлагаемый телесный датчик импульса силы, представленный на фиг.5, нашел широкое применение в качестве инерционной самозамыкающейся кнопки, запускающей на заданное время работы различные устройства, например устройство для стерилизации питьевой воды в полевых условиях с помощью ионов серебра в процессе кратковременного электролиза. Запуск в работу портативного электролизера производится путем его однократного встряхивания в любом направлении в пределах телесного угла 4π стереорадиан с ускорением импульса силы при встряхивании, превышающем ускорение земного притяжения.
Телесный датчик импульса силы, представленный на фиг.5, срабатывает, если между вектором ускорения импульса силы при встряхивании и продольной осью датчика имеется угол, равный нескольким градусам. Величина угла зависит от чувствительности используемых герконов и направления встряхивания: вверх, вбок или вниз.
Телесный датчик импульса силы, использующий миниатюрные герконы замыкающего типа МКА - 07101 или МКА - 10101 с длиной баллона 7 и 10 мм соответственно, имеет размеры в длину 15 мм с диаметром, не превышающим 6 мм. Опытные образцы датчиков обеспечивают безотказную коммутацию до 5·106 циклов коммутаций электрической цепи с активной нагрузкой в режиме 6 В - 10 мкА.
Источники информации
1. К.И.Харазов. Устройства автоматики с магнитоуправляемыми контактами, Москва, Энергоатомиздат, 1990 г., стр.58-75.
2. А.С. СССР N1012296 А, МКИ G 08 B 13/02, опубл. 15. 04. 83, бюл. N14.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ КОМПАС И СПОСОБ СМЕЩЕНИЯ ЦЕНТРА МАСС ЕГО МАГНИТНОЙ СИСТЕМЫ | 1992 |
|
RU2086920C1 |
| СПОСОБ УСКОРЕНИЯ МАГНИТНЫХ ДИПОЛЕЙ | 2010 |
|
RU2442941C1 |
| ВЫКЛЮЧАТЕЛЬ КОНЦЕВОЙ ГЕРКОНОВЫЙ | 2005 |
|
RU2304820C2 |
| ФЕРРОМАГНИТОВЯЗКИЙ ДВИГАТЕЛЬ | 2007 |
|
RU2359398C1 |
| ЭЛЕКТРОМАГНИТНЫЙ ДАТЧИК УСКОРЕНИЯ | 2009 |
|
RU2401431C1 |
| СПОСОБ СОЗДАНИЯ ВИХРЕВОГО МАГНИТНОГО ПОЛЯ | 2008 |
|
RU2364969C1 |
| СПОСОБ ПОЛУЧЕНИЯ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2452074C1 |
| ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА С КОСОКРУГОВЫМИ ОБМОТКАМИ | 2013 |
|
RU2554924C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КРЕНА ВРАЩАЮЩЕГОСЯ ПО КРЕНУ ЛЕТАТЕЛЬНОГО АППАРАТА | 2013 |
|
RU2527369C1 |
| Датчик изменений линейных ускорений | 1990 |
|
SU1777091A1 |



Изобретение относится к устройствам охранной сигнализации. Датчик содержит цилиндрический корпус из изоляционного материала с двумя разделенными центральной перегородкой глухими полостями. В одной из полостей неподвижно размещается геркон замыкающего типа с изогнутыми в одну сторону выводами, а в другой полости, закрытой фасонной пробкой с отверстиями для выводов геркона, находятся два постоянных магнита цилиндрической формы с векторами намагниченности, направленными параллельно продольной оси геркона. Для импульса силы, равного или превышающего силу веса одного из магнитов, с любым направлением вектора, находящегося в пределах поверхности шара с телесным углом 4π стереорадиан при совпадении продольной оси датчика с вектором импульса силы, постоянные магниты обращены одноименными полостями друг к другу и свободно перемещаются относительно геркона. В исходном состоянии при отсутствии импульса силы отношение величины допустимого смещения центра перекрытия контакт - деталей геркона относительно середины зазора между одноименными полюсами магнитов к величине перекрытия контакт - деталей в герконе ограничено определенными пределами при допустимом отличии магнитов друг от друга по намагниченности. Датчик характеризуется расширенной областью практического использования, поскольку обеспечивает кратковременное замыкание контролируемой электрической цепи под воздействием импульса силы при ударе о поверхность с любым (в пределах телесного угла 4π стереорадиан) расположением в пространстве охраняемой поверхности при совпадении продольной оси датчика с вектором ускорения импульса силы. 3 з.п. ф-лы, 5 ил.
при допустимом отличии магнитов друг от друга по намагниченности, не превышающей 20%.
а в пределах телесного угла 2π стереорадиан для нижнего полушария из выражения
где  - угол наклона продольной оси датчика к вектору ускорения импульса силы для верхнего полушария;
- угол наклона продольной оси датчика к вектору ускорения импульса силы для верхнего полушария;
 - угол наклона продольной оси датчика к вектору ускорения импульса силы для нижнего полушария;
- угол наклона продольной оси датчика к вектору ускорения импульса силы для нижнего полушария;
 - допустимое угловое несовпадение продольной оси датчика с вектором ускорения импульса силы в плоскости экватора, зависящее от соотношения модулей ускорений;
- допустимое угловое несовпадение продольной оси датчика с вектором ускорения импульса силы в плоскости экватора, зависящее от соотношения модулей ускорений;
 - вектор ускорения импульса силы;
- вектор ускорения импульса силы;
 - вектор ускорения земного притяжения;
- вектор ускорения земного притяжения;
α° - угол наклона вектора ускорения импульса силы к плоскости экватора в сечении через соответствующий меридиан, при этом исходное значение  , ограниченное неравенством 3°≤
, ограниченное неравенством 3°≤ ≤5°, установлено для соотношения модулей ускорения импульса силы к ускорению земного притяжения, находящегося в пределах
≤5°, установлено для соотношения модулей ускорения импульса силы к ускорению земного притяжения, находящегося в пределах
 .
.
| Инерционный электроконтактный датчик для устройства сигнализации | 1981 |
|
SU1012296A1 |

