Изобретение относится к радиотехнике и может быть использовано при приеме сигналов квадратурной амплитудной манипуляции (КАМ).
Известен демодулятор сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции, содержащий первый и второй фазовые детекторы, фильтр, генератор, первый и второй ограничители (см. патент РФ №2013018, МПК 5 H 04 L 27/22, опубл. БИ №9, 15.05.94 г.) [1].
Недостатком известного демодулятора является его низкая помехоустойчивость, связанная с наличием точки ложного захвата по фазе на его дискриминационной характеристике в окрестности точки ϕ≈23° (см. [1, фиг.2]). Работа демодулятора в состоянии ложного захвата по фазе (которое в известном устройстве не может быть обнаружено и устранено) приводит к полной потере информации на выходе демодулятора.
Известно также устройство восстановления несущей частоты сигналов шестнадцатипозиционной квадратурной амплитудной манипуляции, содержащее первый и второй фазовые детекторы, первый и второй фильтры нижних частот, фазовращатель и четыре сумматора (см. патент РФ №2019054, МПК 5 H 04 L 27/34, опубл. в БИ №16, 30.08.94 г.) [2].
Недостаток известного устройства также состоит в его низкой помехоустойчивости, связанной с возможностью полной потери информации из-за наличия ложного захвата по фазе при ϕ≈23° (см. [2, фиг.3]). Вообще, наличие ложных захватов по фазе является принципиальной особенностью приемников сигналов с амплитудно-фазовой манипуляцией, что объясняется мультимодальностью, т.е. наличием нескольких максимумов, функции правдоподобия при оценке фазы восстановления несущей таких сигналов (см., например, Пархоменко Н.Г., Боташев Б.М., Шеляпин Е.С. Исследование схем восстановления несущей частоты сигналов квадратурной амплитудной манипуляции // Вопросы радиоэлектроники. Сер. ОВР. - М.: НИИЭИР. - 1991. - вып.17, с.65-76) [3].
Из известных технических решений наиболее близким по технической сущности к заявляемому объекту является приемник сигналов квадратурной амплитудной манипуляции, содержащий первый и второй демодуляторы, первый блок восстановления несущей, первый и второй фильтры нижних частот, первый и второй пороговые блоки, элемент ИЛИ и генератор свип-сигнала, вход которого соединен с выходом элемента ИЛИ, а выход - с первым входом первого блока восстановления несущей, выход которого соединен с опорным входом первого демодулятора, сигнальный вход которого является входом устройства и соединен со вторым входом первого блока восстановления несущей и сигнальным входом второго демодулятора, выходы первого и второго фильтров нижних частот соединены соответственно со входами первого и второго пороговых блоков, выходы которых соединены соответственно с первым и вторым входами элемента ИЛИ, выходы первого демодулятора являются выходами устройства (см. патент РФ №2019053, МПК 5 H 04 L 27/34, опубл. в БИ №16, 30.08.94 г.) [4] - прототип.
Недостатком известного устройства является низкая надежность обнаружения ложного захвата и, как следствие этого, низкая помехоустойчивость. Это связано с тем, что принцип обнаружения ложных захватов в известном устройстве основан на допущении о том, что при определенных значениях угла фазового рассогласования ϕ, в некоторую выделенную область принятия решения о переданном символе не попадает ни одна сигнальная точка.
Данное допущение верно лишь при нереально больших отношениях сигнал/шум на входе устройства.
При реальных же отношениях сигнал/шум на входе устройства, порядка 20-25 дБ, такое допущение является не всегда корректным. В связи с этим, в известном устройстве при реальных рабочих отношениях сигнал/шум на входе, величины напряжений, соответствующие наличию или отсутствию ложного захвата в известном устройстве, различаются незначительно. Таким образом, при воздействии шума в известном устройстве высока вероятность не обнаружения ложного захвата или его ошибочной идентификации и устранения, когда на самом деле захват был истинным.
Технический результат - повышение помехоустойчивости приема сигналов КАМ за счет увеличения надежности обнаружения и устранения ложных захватов по фазе достигается выполнением следующих операций над сигналом:
- из входного сигнала КАМ восстанавливают когерентную несущую частоту в первом блоке восстановления несущей;
- используют восстановленную в первом блоке восстановления несущей частоту в качестве опорного колебания при когерентной демодуляции входного сигнала КАМ в первом демодуляторе;
- передают на выход полученные в первом демодуляторе данные;
- формируют шумовой сигнал и суммируют его со входным сигналом КАМ, получая таким образом зашумленный сигнал КАМ;
- из зашумленного сигнала КАМ восстанавливают когерентную несущую частоту во втором блоке восстановления несущей;
- используют восстановленную во втором блоке восстановления несущую частоту в качестве опорного колебания при когерентной демодуляции входного сигнала КАМ во втором демодуляторе;
- используют старший разряд полученных во втором демодуляторе данных в качестве проверочного сигнала, идентифицирующего ложный захват, для чего на каждом такте сравнивают старший разряд данных из второго демодулятора с двумя старшими разрядами данных из первого демодулятора;
- результат сравнения усредняют и сравнивают с пороговой величиной;
- при превышении усредненных результатов сравнения пороговой величины делают вывод о произошедшем в первом блоке восстановления несущей ложном захвате и запускают генератор свип-сигнала, выводящий первый блок восстановления несущей из состояния ложного захвата.
Это достигается тем, что приемник сигналов квадратурной амплитудной манипуляции содержит первый и второй демодуляторы, первый блок восстановления несущей, первый и второй фильтры нижних частот, первый и второй пороговые блоки, элемент ИЛИ и генератор свип-сигнала, вход которого соединен с выходом элемента ИЛИ, а выход - с первым входом первого блока восстановления несущей, выход которого соединен с опорным входом первого демодулятора, сигнальный вход которого является входом устройства и соединен со вторым входом первого блока восстановления несущей и сигнальным входом второго демодулятора, выходы первого и второго фильтров нижних частот соединены соответственно со входами первого и второго пороговых блоков, выходы которых соединены соответственно с первым и вторым входами элемента ИЛИ, выходы первого демодулятора являются выходами устройства.
Согласно изобретению в него введены второй блок восстановления несущей, сумматор, генератор шума, четыре элемента И, третий и четвертый фильтры нижних частот, третий и четвертый пороговые блоки, причем опорный вход второго демодулятора соединен с выходом второго блока восстановления несущей, вход которого соединен с выходом сумматора, второй вход которого соединен с выходом генератора шума, а первый вход со входом устройства.
Первый выход второго демодулятора соединен с первыми входами первого, второго, третьего и четвертого элементов И, первый выход первого демодулятора соединен со вторым входом первого элемента И и вторым инверсным входом второго элемента И, второй выход первого демодулятора соединен со вторым входом третьего элемента И и вторым инверсным входом четвертого элемента И, выходы первого, второго, третьего и четвертого элементов И соединены соответственно со входами первого, второго, третьего и четвертого фильтров нижних частот, выходы третьего и четвертого фильтров нижних частот соединены соответственно со входами третьего и четвертого пороговых блоков, выходы которых соединены соответственно с третьим и четвертым входами элемента ИЛИ.
Это позволяет выполнить новые операции над сигналами: из предварительно зашумленного сигнала КАМ восстановить когерентную несущую частоту во втором блоке восстановления несущей, с ее помощью когерентно демодулировать сигнал КАМ во втором демодуляторе и путем сравнения демодулированных данных в обоих демодуляторах идентифицировать ложный захват.
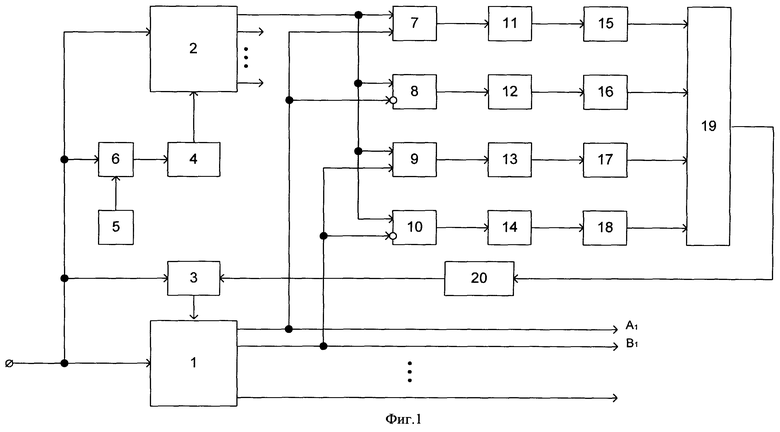
На фиг.1 приведена функциональная схема приемника сигналов КАМ.
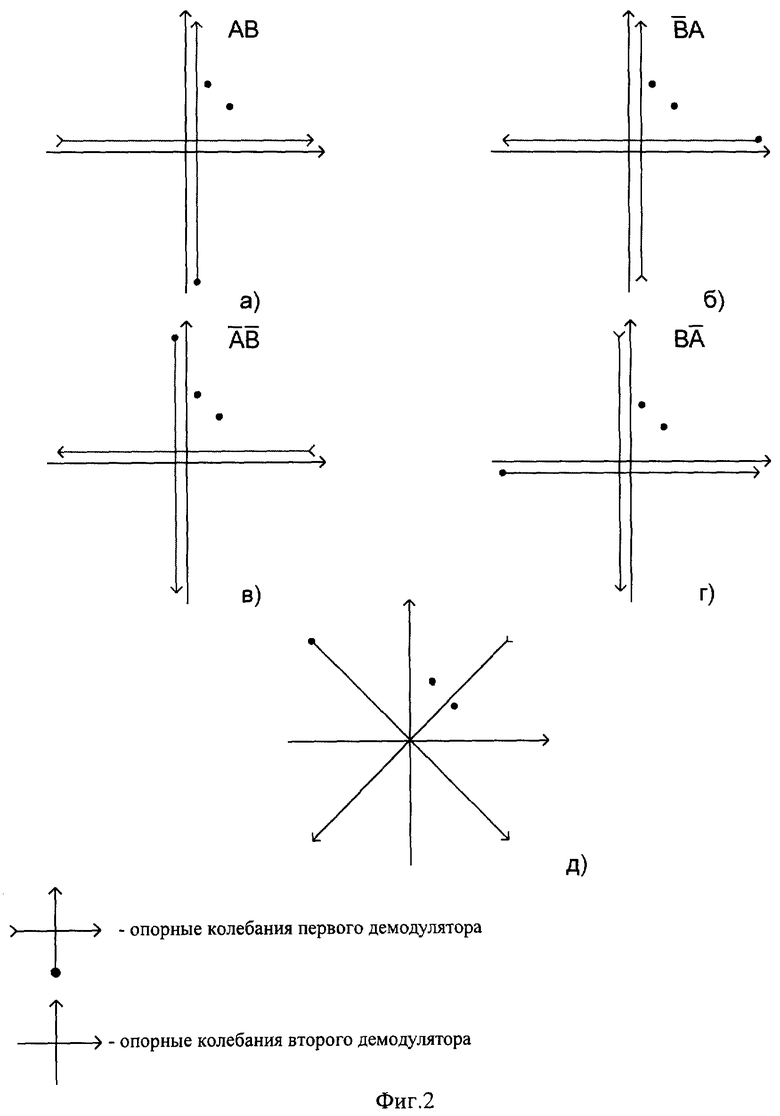
Фиг.2 иллюстрирует принцип обнаружения ложного захвата при любых вариантах "обратной работы" демодуляторов.
Приемник сигналов КАМ содержит первый и второй демодуляторы 1 и 2, первый и второй блоки 3 и 4 восстановления несущей, генератор 5 шума, сумматор 6, первый - четвертый элементы И 7-10, первый - четвертый фильтры нижних частот (ФНЧ) 11-14, первый - четвертый пороговые блоки (ПБ) 15-18, элемент ИЛИ 19 и генератор 20 свип-сигнала.
Вход генератора 20 свип-сигнала соединен с выходом элемента ИЛИ 19, а выход - с первым входом первого блока 3 восстановления несущей, выход которого соединен с опорным входом первого демодулятора 1, сигнальный вход которого является входом устройства и соединен со вторым входом первого блока 3 восстановления несущей и сигнальным входом второго демодулятора 2.
Выходы первого и второго фильтров нижних частот 11 и 12 соединены соответственно со входами первого и второго пороговых блоков 15 и 16, выходы которых соединены соответственно с первым и вторым входами элемента ИЛИ 19, выходы первого демодулятора 1 являются выходами устройства.
Опорный вход второго демодулятора 2 соединен с выходом второго блока восстановления несущей 4, вход которого соединен с выходом сумматора 6, второй вход которого соединен с выходом генератора 5 шума, а первый вход со входом устройства, первый выход второго демодулятора 2 соединен с первыми входами первого, второго, третьего и четвертого элементов И 7-10, первый выход первого демодулятора 1 соединен со вторым входом первого элемента И 7 и вторым инверсным входом второго элемента И 8, второй выход первого демодулятора 1 соединен со вторым входом третьего элемента И 9 и вторым инверсным входом четвертого элемента И 10, выходы первого, второго, третьего и четвертого элементов И 7-10 соединены соответственно со входами первого, второго, третьего и четвертого фильтров нижних частот 11-14, выходы третьего и четвертого фильтров нижних частот 9 и 10 соединены соответственно со входами третьего и четвертого пороговых блоков 17 и 18, выходы которых соединены соответственно с третьим и четвертым входами элемента ИЛИ 19.
Приемник работает следующим образом.
В первом блоке 3 восстановления несущей происходит восстановление когерентной несущей частоты, которая через опорный вход поступает на первый демодулятор 1, где используется как опорное колебание при когерентной демодуляции входного сигнала КАМ. Полученные при этом данные поступают на выход приемника.
Аналогично этому происходит когерентная демодуляция сигнала КАМ во втором демодуляторе 2 с той разницей, что для восстановления несущей в блоке 4 используется входной сигнал КАМ, сложенный в сумматоре 6 с шумовым сигналом, формируемым генератором 5 шума. Таким образом, принципиально работа блока 4 отличается от работы блока 3 более низким отношением сигнал/шум на его входе.
Генератор 5 шума формирует белый Гаусовый шум во всей полосе входного сигнала КАМ.
При дальнейшем описании логики работы приемника КАМ используется следующее положение: вероятность ложных захватов наибольшая при высоком отношении сигнал/шум и уменьшается по мере его снижения (см., например, [3] или Leclert A. and Vondamme P. Universal Carrier Receivery Loop for QASK and PSK Signal Sets // IEEE Transaction on Communications. - 1983. - vol. СОМ - 31, №1, р.р.130-137 [5]).
Таким образом, выбрав уровень сигнала на выходе генератора 5 шума достаточно большим, можно достичь того, что второй блок 4 восстановления несущей никогда не будет находиться в состоянии ложного захвата, тогда как первый блок 3 может находиться в состоянии как истинного, так и ложного захватов.
Этот факт дает принципиальную возможность использовать данные с выхода демодулятора 2 в качестве проверочных для идентификации типа захвата в демодуляторе 1.
Непосредственно в качестве выходных данных всего приемника, данные с выхода второго демодулятора 2 использованы быть не могут в силу того, что вероятность ошибки в них выше из-за использования при демодуляции зашумленного опорного колебания.
Вместе с тем, поскольку вероятность дополнительных по отношению к данным на выходе демодулятора 1 ошибок в данных на выходе демодулятора 2 невелика, это дает возможность использовать последние как проверочные сигналы для определения типа захвата в демодуляторе 1.
Для этого достаточно сравнить с последующем усреднением данные на первом выходе демодулятора 2 и данные на выходе демодулятора 1. Поскольку для демодуляторов принципиально свойственно явление "обратной работы", в заявляемом устройстве происходит сравнение данных А2 с данными, А1,  , B1, и
, B1, и  в соответствии с возможными вариантами "обратной работы" демодуляторов (см. фиг.2, а - г).
в соответствии с возможными вариантами "обратной работы" демодуляторов (см. фиг.2, а - г).
При этом буквами А и В обозначены старшие разряды данных на выходе демодуляторов, дибит пара которых определяет номер квадранта на сигнальной плоскости, в который попала принятая сигнальная точка. Индекс соответствует номеру демодулятора.
Тогда, в состоянии истинного захвата демодулятора 1 и блока 3, на выходе одного из ФНЧ 11-14 будет присутствовать уровень, соответствующий полному совпадению последовательности данных на входах соответствующего элемента И 7-10.
Пусть, например, демодулятор 1 находится в состоянии истинного захвата и одновременно варианта "обратной работы"  (см. фиг.2, в). Тогда во всех тактах на выходе второго элемента И 8 будет формироваться сигнал совпадения - логическая 1.
(см. фиг.2, в). Тогда во всех тактах на выходе второго элемента И 8 будет формироваться сигнал совпадения - логическая 1.
В соответствии с этим, на выходе ФНЧ 12 будет присутствовать уровень 1, на выходе ФНЧ 11 - уровень 0, на выходах ФНЧ 13 и ФНЧ 14 - уровни 0,5.
Каждый из пороговых блоков 15-18 устроен таким образом, что сигнал логической 1 на его выходе сменяется на логический 0 при понижении сигнала на его входе ниже порогового уровня.
Выберем пороговый уровень близким к значению 1, например 0,9.
Тогда в состоянии истинного захвата демодулятора 1 всегда существует такой ПБ (какой именно - определяется вариантом "обратной работы"), который имеет на своем выходе логическую 1, соответствующую усредненному совпадению данных на входах одного из элементов И 7-10.
В случае же, если в первом блоке 3 восстановления несущей захват произошел в состоянии ложного захвата по фазе, то тогда ни в каком из элементов И 7-10 не будет последовательно во времени наблюдаться полное совпадение сигналов на их входах. Это иллюстрирует фиг.2 д, из которого видно, что сигнальные точки, реально попадающие в один сигнальный квадрант (так же, как и на фиг.а-г), в случае ложного захвата воспринимаются приемником как принадлежащие разным квадрантам. Соответственно, на выходах всех ПБ 15-18 будут формироваться логические 0.
Генератор 20 свип-сигнала запускается при поступлении логического 0 на его вход.
Тогда, в состоянии ложного захвата, через элемент ИЛИ 19 с выходов ПБ 15-18 логический 0 запускает генератор 20 свип-сигнала, который воздействует на блок 3, выводя его из состояния синхронизма.
Таким образом, использование в заявляемом устройстве операций и соответствующих сигналов, не с какой-то степенью вероятности (как в прототипе), а 100% достоверно идентифицирующих ложный захват, позволяет повысить помехоустойчивость заявляемого устройства в сравнении с прототипом.
Источники информации
1. Патент РФ №2013018, МПК 5 H 04 L 27/22, опубл. БИ №9, 15.05.94 г.
2. Патент РФ №2019054, МПК 5 H 04 L 27/34, опубл. в БИ №16, 30.08.94 г.
3. Пархоменко Н.Г., Боташев Б.М., Шеляпин Е.С. Исследование схем восстановления несущей частоты сигналов квадратурной амплитудной манипуляции // Вопросы радииоэлектроники. Сер. ОВР. - М.: НИИЭИР. - 1991, - вып.17, с.65-76
4. Патент РФ №2019053, МПК 5 H 04 L 27/34, опубл. в БИ №16, 30.08.94 г. - прототип.
5. Leclert A. and Vondamme P. Universal Carrier Receivery Loop for QASK and PSK Signal Sets // IEEE Transaction on Communications. - 1983, - vol. СОМ -31, №1, p.p.130-137.
Изобретение относится к радиотехнике и может быть использовано при приеме сигналов квадратурной амплитудной манипуляции (КАМ). Достигаемым техническим результатом является повышение помехоустойчивости приема сигналов КАМ за счет увеличения надежности обнаружения и устранения ложных захватов по фазе. Для этого выполняются следующие операции над сигналом: из входного сигнала КАМ восстанавливают когерентную несущую частоту в первом блоке восстановления несущей; используют восстановленную в первом блоке восстановления несущей частоту в качестве опорного колебания при когерентной демодуляции входного сигнала КАМ в первом демодуляторе; используют восстановленную во втором блоке восстановления несущую частоту в качестве опорного колебания при когерентной демодуляции входного сигнала КАМ во втором демодуляторе. 2 ил.
Приемник сигналов квадратурной амплитудной манипуляции, содержащий первый и второй демодуляторы, первый блок восстановления несущей, первый и второй фильтры нижних частот, первый и второй пороговые блоки, элемент ИЛИ и генератор свип-сигнала, вход которого соединен с выходом элемента ИЛИ, а выход - с первым входом первого блока восстановления несущей, выход которого соединен с опорным входом первого демодулятора, сигнальный вход которого является входом устройства и соединен со вторым входом первого блока восстановления несущей и сигнальным входом второго демодулятора, выходы первого и второго фильтров нижних частот соединены, соответственно, со входами первого и второго пороговых блоков, выходы которых соединены, соответственно, с первым и вторым входами элемента ИЛИ, выходы первого демодулятора являются выходами устройства, отличающийся тем, что в него введены второй блок восстановления несущей, сумматор, генератор шума, четыре элемента И, третий и четвертый фильтры нижних частот, третий и четвертый пороговые блоки, причем опорный вход второго демодулятора соединен с выходом второго блока восстановления несущей, вход которого соединен с выходом сумматора, второй вход которого соединен с выходом генератора шума, а первый вход со входом устройства, первый выход второго демодулятора соединен с первыми входами первого, второго, третьего и четвертого элементов И, первый выход первого демодулятора соединен со вторым входом первого элемента И и вторым инверсным входом второго элемента И, второй выход первого демодулятора соединен со вторым входом третьего элемента И и вторым инверсным входом четвертого элемента И, выходы первого, второго, третьего и четвертого элементов И соединены, соответственно, со входами первого, второго, третьего и четвертого фильтров нижних частот, выходы третьего и четвертого фильтров нижних частот соединены, соответственно, со входами третьего и четвертого пороговых блоков, выходы которых соединены, соответственно, с третьим и четвертым входами элемента ИЛИ.
| ПРИЕМНИК СИГНАЛОВ КВАДРАТУРНОЙ АМПЛИТУДНОЙ МАНИПУЛЯЦИИ | 1990 |
|
RU2019053C1 |
| Исследование схем восстановления несущей частоты сигналов квадратурной амплитудной манипуляции | |||
| Вопросы радиоэлектроники | |||
| Сер | |||
| ОВР.- М.: НИИЭИР, 1991, вып | |||
| Печь для сжигания твердых и жидких нечистот | 1920 |
|
SU17A1 |

