1. Область техники
Изобретение относится к области гироскопического приборостроения и предназначено для повышения точностных характеристик прецессионных динамически настраиваемых гироскопов (ДНГ) [1, 2]. Такие ДНГ нашли широкое применение в мировой гироскопической технике в качестве чувствительных элементов инерциальных навигационных систем подвижных объектов гражданского и военного назначения. Чувствительный элемент прецессионного ДНГ содержит симметричный маховик - носитель кинетического момента, связанный с приводным валом двигателя упругим подвесом, содержащим упругие элементы и одно или несколько кардановых колец. Для достижения стабильности упругих характеристик подвеса и положения центров масс кардановых колец и маховика относительно осей упругих элементов подвеса, как правило, применяют монолитную конструкцию упругого подвеса.
2. Уровень техники
За прототип изобретения принят ДНГ с монолитным упругим подвесом, выполненным до патенту США № 3943778 [3].
В этом подвесе упругие элементы, кардановы кольца, маховик (или его часть) и часть приводного вала формируются путем электроэрозионной обработки из единой цельной заготовки. Конструктивно подвес представляет собой монолитный диск с центральным отверстием, имеющий три концентрические щели. Часть диска между центральном отверстием и концентрической щелью малого диаметра образует втулку-деталь приводного вала, часть диска между его ободом и концентрической щелью большого диаметра - маховик гироскопа (или деталь, к которой маховик крепится), часть диска между щелями большого и малого диаметров - кардановы кольца. Перемычки в щелях выполняются в виде упругих элементов, соединяющих кардановы кольца с маховиком и приводным валом.
Монолитная конструкция упругого подвеса позволила реализовать гамму малогабаритных, экономичных ДНГ с высокими механическими и стабильными точностными характеристиками.
Разработчики ДНГ, как и разработчики других гироскопов, стремятся выполнить известное "условие равножесткости" [4, 5], то есть обеспечить одинаковые линейные жесткости упругого подвеса в направлении оси приводного вала и в радиальном направлении. Это позволяет уменьшить составляющую скорости ухода гироскопа, пропорциональную квадрату линейного ускорения основания.
Однако гироскоп-прототип с равножестким подвесом, инвариантный к постоянному линейному ускорению основания, обладает существенным недостатком - высокой чувствительностью к линейным вибрациям, обусловленным как внешними, так и внутренними факторами, связанными с погрешностями шарикоподшипниковых опор приводного вала.
Для доказательства рассмотрим линейное движение гироскопа-прототипа в осевом и радиальном направлениях на базе классической теории колебаний [6].
Так как масса кардановых колец значительно меньше массы маховика гироскопа, то его вибромассовая модель в каждом направлении может быть представлена как типичная механическая колебательная система с двумя последовательно соединенными массами - маховиком и приводным валом.
Такая система с двумя степенями свободы имеет две главные собственные частоты колебаний k1 и k2, связанные с параметрами системы следующими соотношениями:
где  ;
;
 ;
;
 ;
;
Сro, Сrp _ линейные жесткости подвеса маховика к валу,
Cso, Csp - линейные жесткости подвеса приводного вала к корпусу гироскопа,
mr, ms - массы маховика и приводного вала соответственно.
Индексы "о" и "р" в выражениях (1) относятся к параметрам системы при ее колебаниях в осевом и радиальном направлениях соответственно. Рассматривая уравнения, описывающие угловое и линейное движения ДНГ при так называемой "косой" линейной вибрации с частотой Р, вектор которой  не совпадает ни с осевым, ни с радиальным направлениями, можно показать, что к гироскопу будет приложен выпрямленный момент, вызывающий угловую скорость ухода, определяемую выражением:
не совпадает ни с осевым, ни с радиальным направлениями, можно показать, что к гироскопу будет приложен выпрямленный момент, вызывающий угловую скорость ухода, определяемую выражением:
где  ,
,  - проекции вектора
- проекции вектора  вибрации на ось приводного вала и на перпендикулярную ей ось соответственно;
вибрации на ось приводного вала и на перпендикулярную ей ось соответственно;
λo, λp - коэффициенты динамичности гироскопа в осевом и радиальном направлениях соответственно.
Коэффициенты λo и λр, в свою очередь, определяются следующими выражениями:

Из анализа формулы (2) следует, что в гироскопе-прототипе с равножестким подвесом, у которого осевая жесткость Сro равна радиальной Crp, не устраняется уход, вызванный синхронными линейными вибрациями. Этот уход устраняется при выполнении дополнительного условия - равенства коэффициентов динамичности λo и λр, что согласно формуле (3) эквивалентно равенству частот k1o и k1p, k2o и k2p.
Таким образом, гироскоп может быть инвариантным как к постоянным линейным ускорениям, так и к синхронным линейным вибрациям при одновременном выполнении двух условий - условия равножесткооти подвеса и условия равночастотности (равенства главных собственных частот в осевом и радиальном направлениях).
Анализ выражений (1) показывает, что для выполнения условия равночастотности при одинаковой жесткости упругого подвеса маховика в осевом и радиальном направлениях необходимо обеспечить равенство осевой Cso и радиальной Csp жесткостей подвеса приводного вала.
В известных конструкциях ДНГ, включая и гироскоп-прототип, осевая жесткость Cso значительно меньше радиальной Csp, так как только при малой осевой жесткости шарикоподшипников и упругих элементов корпуса гироскопа, в которых они установлены, можно обеспечить заданную и стабильную величину осевого натяга шарикоподшипников. Это позволяет реализовать ДНГ с высоким ресурсом работы, а также с малым и стабильным моментом сопротивления вращению шарикоподшипников. В свою очередь, большая жесткость шарикоподшипников и упругих элементов корпуса в радиальном направлении обеспечивает стабильное положение оси приводного вала относительно корпуса гироскопа и малую величину угловых колебаний приводного вала, негативно влияющих на точностные характеристики ДНГ [5].
3. Сущность изобретения
Технический результат - повышение точности ДНГ при линейных вибрациях достигается в предлагаемом устройстве следующим образом: между упругим кардановым подвесом и приводным валом гироскопа устанавливается пружина, упругоподатливая только в радиальном направлении, причем податливость этой пружины выбирается из условия равенства первых главных собственных частот колебаний гироскопа в осевом и радиальном направлениях (k1o=k1p). Поскольку в осевом направлении жесткость пружины можно считать бесконечно большой, линейная жесткость подвеса Cro и, следовательно, собственные частоты k1o и k2p в уравнениях (1) остаются неизменными. Линейная жесткость подвеса ротора к валу в радиальном направлении уменьшается за счет податливости пружины, принимая новое значение  , при котором обеспечивается равенство частот k1o и k1p. Уменьшение жесткости подвеса маховика к валу в радиальном направлении не меняет вида выражения (2), в котором линейные жесткости подвеса Cro и Crp остаются прежними, потому что уводящий момент действует только вокруг осей карданова подвеса (осей упругих элементов подвеса), а эти оси при деформации пружины перемещаются вместе с маховиком на величину этой деформации. Вблизи первых, равных между собой, главных собственных частот колебаний гироскопа коэффициенты динамичности λo и λp, определяемые выражениями (3), почти одинаковы, потому что вторые сомножители знаменателей этих выражений мало отличаются от единицы, так как вторые главные частоты k2o и k2р значительно больше частоты возмущения Р. Следовательно, учитывая выражение (2), можно утверждать, что в области первых главных собственных частот линейные синхронные вибрации значительно меньше влияют на предлагаемое устройство, чем на гироскоп-прототип.
, при котором обеспечивается равенство частот k1o и k1p. Уменьшение жесткости подвеса маховика к валу в радиальном направлении не меняет вида выражения (2), в котором линейные жесткости подвеса Cro и Crp остаются прежними, потому что уводящий момент действует только вокруг осей карданова подвеса (осей упругих элементов подвеса), а эти оси при деформации пружины перемещаются вместе с маховиком на величину этой деформации. Вблизи первых, равных между собой, главных собственных частот колебаний гироскопа коэффициенты динамичности λo и λp, определяемые выражениями (3), почти одинаковы, потому что вторые сомножители знаменателей этих выражений мало отличаются от единицы, так как вторые главные частоты k2o и k2р значительно больше частоты возмущения Р. Следовательно, учитывая выражение (2), можно утверждать, что в области первых главных собственных частот линейные синхронные вибрации значительно меньше влияют на предлагаемое устройство, чем на гироскоп-прототип.
Снизить влияние на гироскоп линейных вибраций наиболее важно именно в области его первых главных собственных частот, так как в области вторых главных собственных частот коэффициенты динамичности существенно уменьшаются за счет того, что первый сомножитель знаменателя каждого из выражений (3) значительно больше единицы, поскольку частота Р вибрации значительно больше первой главной частоты k1o или k1p.
В качестве пружины предлагается использовать внутреннюю втулку монолитного чувствительного элемента ДНГ, являющуюся частью приводного вала гироскопа. Для того чтобы эта втулка была податливой в радиальном направлении, предлагается прорезать в ней радиальные и кольцевые щели таким образом, чтобы каждый упругий элемент карданова подвеса соединялся с жестким приводным валом через консольную балку. Податливость этих балок выбирается такой, чтобы первая главная собственная частота колебаний гироскопа в радиальном направлении была равна первой главной частоте его колебаний в осевое направлении.
4. Перечень фигур чертежей
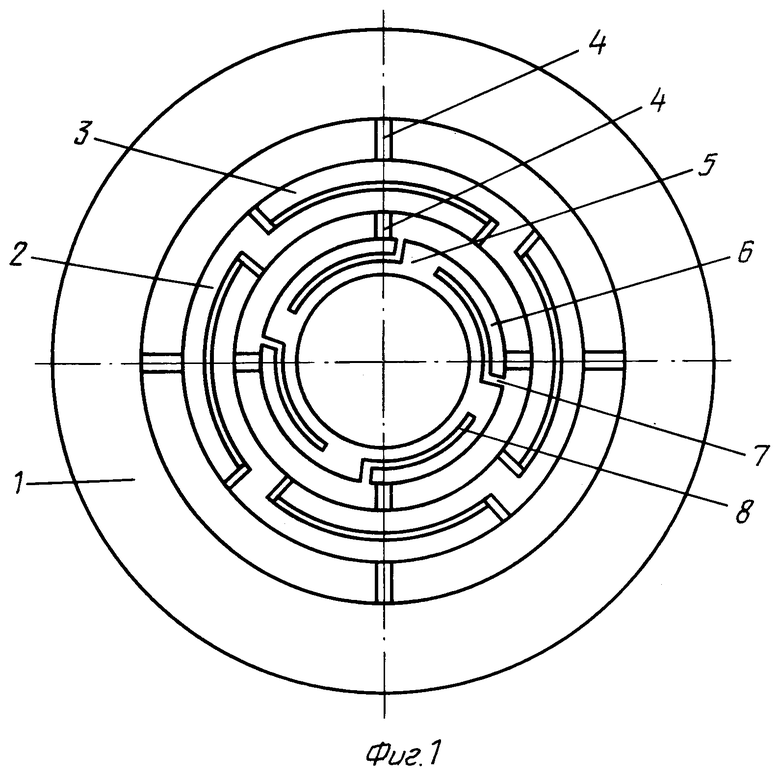
Сущность изобретения поясняется рисунками, где на фиг.1 дан вид на монолитный чувствительный элемент ДНГ со стороны оси приводного вала, на фиг.2 дан вид со стороны оси приводного вала на одну из четырех консольных балок и приведена схема ее нагружения внешними силами.
На фиг.1 цифрами обозначены:
1 - маховик гироскопа, 2, 3 - кардановы кольца, 4 - упругие элементы карданова подвеса, 5 - втулка (деталь приводного вала), 6 - консольная балка, 7 - радиальная щель во втулке 5, 8 - концентрическая щель во втулке 5.
На фиг.2 обозначено:
ϕ - центральный угол сегмента - консольной балки (поз. 6 фиг.1) среднего радиуса R и толщины h от сечения A, совпадающего с осью Y.
Монолитный чувствительный элемент ДНГ представляет собой диск с центральным отверстием, до которому он устанавливается на приводном валу гироскопа. Маховик 1 связан с втулкой 5 (деталью приводного вала) упругим кардановым подвесом, состоящим из кардановых колец 2, 3 и упругих элементов 4. Каждое карданово кольцо связано одной парой упругих элементов 4 с маховиком, а другой парой - с втулкой через консольные балки 6, образованные во втулке 5 радиальными щелями 7 и концентрическими щелями 8. Линейная податливость балок 6 выбирается такой, чтобы были равны первые главные собственные частоты колебаний гироскопа в осевом и радиальном направлениях.
Каждую консольную балку, как это следует из фиг.2, можно рассматривать как кривой стержень среднего радиуса R, защемленный жестко в сечении В. К свободному концу стержня в сечении А приложены (от упругих элементов карданова подвеса) внешние силы Рх и Ру.
При расчете деформации такой консольной балки можно учитывать только изгибающие моменты в сечениях, пренебрегая нормальными и касательными силами, что дает незначительную погрешность в расчете [7]. В этом случае линейные податливости балки в направлении осей Х и Y (фиг.2) определяются выражениями:

где  - момент инерции сечения балки плоскостью, содержащей ось приводного вала, с размерами прямоугольного сечения b - в осевом направлении (толщина втулки 6), h - в радиальном направлении;
- момент инерции сечения балки плоскостью, содержащей ось приводного вала, с размерами прямоугольного сечения b - в осевом направлении (толщина втулки 6), h - в радиальном направлении;
Е - модуль упругости материала балки на растяжение-сжатие.
С учетом выражений (4) линейная жесткость подвеса ротора к валу в радиальном направлении в выражениях (1) будет определяться зависимостью:

Величина жесткости  должна обеспечить равенство главных собственных частот гироскопа в осевом k1o и радиальном k1p направлениях.
должна обеспечить равенство главных собственных частот гироскопа в осевом k1o и радиальном k1p направлениях.
Алгоритм определения параметров консольной балки (b, h, ϕ, R), необходимых для выполнения этого равенства, следующий:
1. По известным параметрам mr, ms, Cso, Crp из выражения (1) находится главная собственная частота колебаний гироскопа в осевом направлении k1o.
2. По известным параметрами mr, ms, Cзp подбирается из выражения (1) значение линейной жесткости подвеса ротора к валу в радиальном направлении С'rp, при котором выполняется равенство
k1o=k1p
3. При известных значениях  и Сrp подбираются параметры консольной балки, обеспечивающие выполнение равенства (5).
и Сrp подбираются параметры консольной балки, обеспечивающие выполнение равенства (5).
5. Возможность осуществления изобретения
Возможность осуществления рассмотрим на примерах расчета параметров консольной балки, выполненной для достижения цели изобретения в реальном монолитном чувствительном элементе ДНГ, и сравнения точностных характеристик гироскопа-прототипа и заявляемого гироскопа с идентичными параметрами при линейных вибрациях основания.
Известны следующие параметры гироскопов:
1. Масса маховика mr - 100 г
2. Масса приводного вала ms - 60 г
3. Линейная жесткость карданова подвеса
в осевом Cro и радиальном Crр направлениях - 3·106
4. Линейная жесткость шарикоподшипника:
- в осевом направлении Cш/п о - 3·106
- в радиальном направлении Cш/п р - 6·106
5. Линейная жесткость упругих элементов корпуса
(крышек)
- в осевом направлении Скр о - 5·106
- в радиальном направлении Скр р - 3·106
6. Внешний диаметр внутренней втулки
монолитного чувствительного элемента Дв - 1,2 см
7. Толщина втулки b - 1 см
8. Модуль упругости материала втулки Е - 2·109
9. Кинетический момент гироскопа Н - 800 Гс·см·с
Поскольку линейные жесткости шарикоподшипников и крышек соединены последовательно, линейные жесткости подвеса приводного вала к корпусу в осевом Cso и радиальном Csp направлениях определятся следующим образом:
 ;
;
 .
.
По формулам (1) находятся главные собственные частоты (угловые) колебаний гироскопов в осевом направлении (одинаковые для прототипа и предлагаемого гироскопа):
 ;
;
 .
.
Также определяются главные собственные частоты колебаний гироскопа-прототипа в радиальном направлении:
 ;
;
 .
.
Подбором жесткости  для предлагаемого устройства определяется такое ее значение, при котором k1p равно k1o
для предлагаемого устройства определяется такое ее значение, при котором k1p равно k1o

Из технологических соображений выбирается размер h сечения консольной балки (фиг.2), равный 0,06 см. При этом, поскольку внешний диаметр внутренней втулки чувствительного элемента ДНГ (фиг.1) равен 1,2 см, средний радиус R сечения балки (фиг.2) будет равен 0,57 см.
При известной жесткости карданова подвеса Crp=3·106 подстановкой в формулу (5) значений податливостей консольной балки, вычисляемых по формулам (4), определяется угол ϕ (фиг.2), при котором
подстановкой в формулу (5) значений податливостей консольной балки, вычисляемых по формулам (4), определяется угол ϕ (фиг.2), при котором  . Расчетное значение угла ϕ будет равно 64°.
. Расчетное значение угла ϕ будет равно 64°.
При таком угле
 ;
;
 .
.
Вторая главная собственная частота колебаний предлагаемого гироскопа в радиальном направлении k2р согласно формулам (1) составит:

Ниже приведено сравнение точностных характеристик заявляемого гироскопа и гироскопа-прототипа при линейной вибрации основания со следующими параметрами:
1. амплитуда вибрации  - 1 g;
- 1 g;
2. частота вибрации P - 600 Гц;
3. угол между направлением вектора вибрации и осью приводного вала - 45°;
При таких параметрах вибрации основания значения проекций вектора вибрации  и
и  в формуле (2) будут равны
в формуле (2) будут равны  .
.
Согласно формулам (2) и (3) расчетные значения угловых скоростей ω уходов гироскопов будут следующие:
1. Для гироскопа-прототипа
 при λо=32,46, λр=2,987
при λо=32,46, λр=2,987
2. Для заявляемого гироскопа
 при λо=32,46, λр=31,22
при λо=32,46, λр=31,22
Таким образом, точность заявляемого гироскопа при выбранной линейной вибрации основания в 23,8 раза выше точности гироскопа-прототипа. При приближении частоты линейной вибрации основания к первой главной частоте колебаний гироскопа (610,5 Гц) отношение точностей еще больше возрастет.
Литература
1. Новиков Л.З., Шаталов М.Ю. Механика динамически настраиваемых гироскопов. - М.: Наука, 1985.
2. Брозгуль Л.И. Динамически настраиваемые гироскопы. - М.: Машиностроение, 1989.
3. Wyse S. Pat. USA № 3943778.
4. Бабаева Н.Ф. и др. Детали и элементы гироскопических приборов. - Л., Судпромгиз, 1962.
5. Craig R. Theory of Errors a Multigimball Elastically Supported Tuned gyroscope. - Trans an Aerospace and Electronic Systems, May, 1972, v. AES-8, № 3, p. 280-297.
6. Бутенин И.В. Теория колебаний. - М.: Высшая школа, 1963.
7. Беляев Н.М. Сопротивление материалов. - М.: Физматгиз, 1959.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ балансировки динамически настраиваемого гироскопа | 2018 |
|
RU2690039C1 |
| Способ уменьшения вибрационных погрешностей гироплатформы на динамически настраиваемых гироскопах | 2020 |
|
RU2750180C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2248524C1 |
| УПРУГИЙ ПОДВЕС ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2001 |
|
RU2215262C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 1988 |
|
RU2065575C1 |
| УПРУГИЙ КАРДАНОВЫЙ ПОДВЕС ГИРОСКОПА | 1995 |
|
RU2093793C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПРОЕКЦИЙ ГОРИЗОНТАЛЬНОЙ СОСТАВЛЯЮЩЕЙ ВЕКТОРА УГЛОВОЙ СКОРОСТИ ВРАЩЕНИЯ ЗЕМЛИ ДЛЯ ОПРЕДЕЛЕНИЯ АЗИМУТАЛЬНОГО НАПРАВЛЕНИЯ (КОМПАСИРОВАНИЯ) | 2005 |
|
RU2300078C1 |
| СПОСОБ НАСТРОЙКИ ГИРОСКОПА | 2004 |
|
RU2253840C1 |
| СПОСОБ ДИНАМИЧЕСКОЙ НАСТРОЙКИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2005 |
|
RU2288450C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |

Изобретение относится к области гироскопического приборостроения и предназначено для прецессионных динамически настраиваемых гироскопов (ДНГ), нашедших широкое применение в качестве чувствительных элементов инерциальных навигационных систем подвижных объектов. ДНГ содержит монолитный упругий подвес, в котором упругие элементы соединяются со втулкой приводного вала через консольные балки, образованные вырезанными во втулке радиальными и кольцевыми щелями, причем линейные податливости балок выбираются из условия равенства первых главных собственных частот колебаний гироскопа в осевом и радиальном направлениях. Техническим результатом является повышение точности. 2 ил.
Динамически настраиваемый гироскоп, содержащий монолитный чувствительный элемент, включающий маховик, втулку приводного вала и карданов подвес, состоящий из кардановых колец и упругих элементов, соединяющих кардановы кольца с маховиком и втулкой, отличающийся тем, что упругие элементы соединяются со втулкой приводного вала через упругие консольные балки, образованные вырезанными во втулке радиальными и кольцевыми щелями, причем линейные податливости балок выбираются из условия равенства первых главных собственных частот колебаний гироскопа в осевом и радиальном направлениях.
| US 3943778 А, 16.03.1976 | |||
| ПЕЛЬПОР Д.С | |||
| и др | |||
| Динамически настраиваемые гироскопы | |||
| - М.: Машиностроение, 1988, с.226-229 | |||
| RU 2058527 C1, 20.04.1996 | |||
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| US 4528864 А, 16.07.1985. | |||

