Изобретение относится к средствам радиолокации и предназначено для обнаружения и классификации цели по признаку ее принадлежности к целям, находящимся в зоне однозначного измерения дальности импульсного радиолокатора, т.е. в рабочей зоне радиолокатора.
Известен способ обработки пачки радиоимпульсов с неизвестными начальными фазами, при котором происходит последетекторное (некогерентное) накопление видеоимпульсов с неизвестными амплитудами, осуществляемое на экране радиолокационного индикатора при визуальном съеме данных [Теоретические основы радиолокации: Учебное пособие для вузов. /Под ред. Я.Д.Ширмана. - М.: Советское радио, 1970, с.156]. Накопление пачки видеоимпульсов основано на послесвечении экрана индикатора и используется только при визуальном съеме информации. По своему эффекту такой способ некогерентного накопления приближается к квадратичному, хотя, естественно, отличается от оптимального.
При автоматизированном съеме данных для приближенной реализации некогерентного накопления пачки из N импульсов могут быть использованы электрическая запись на потенциалоскопе со считыванием или магнитная запись [Теоретические основы радиолокации: Учебное пособие для вузов. /Под ред. Я.Д.Ширмана. - М.: Советское радио, 1970, с.158]. Как и предыдущий способ, использование электрической или магнитной записи в устройствах обнаружения, строго говоря, не обеспечивает оптимальной обработки.
Особенно широкое распространение для последетекторной обработки пачки радиоимпульсов находят устройства цифрового (двухпорогового) накопления с применением схем счета импульсов, превышающих порог [Теоретические основы радиолокации: Учебное пособие для вузов. /Под ред. Я.Д.Ширмана. - М.: Советское радио, 1970, с.158, 159]. В двухпороговых цифровых устройствах некогерентного накопления сигнал с выхода детектора подается на первую пороговую схему, осуществляющую бинарное квантование входного сигнала по амплитуде и квантование по времени. В результате квантования на выходе первого порогового устройства создается дискретная последовательность из нулей и единиц, подсчитываемых далее в пределах одного кольца дальности схемой счета импульсов. С учетом пропадания отдельных импульсов при квантовании по амплитуде в первом пороговом устройстве из-за флюктуаций или наложения противофазных шумов решение о наличии цели принимается, если налицо m или более импульсов из N возможных (логика m из N). Наличие m из N возможных импульсов проверяется при помощи второго порогового устройства. При числе импульсов m, меньшем числа импульсов в пачке N (m<N), имеет место известный проигрыш в пороговой мощности сигнала, связанный с ухудшением энергетики радиолокационной станции.
Известен способ последетекторной обработки пачки радиоимпульсов, заключающийся в некогерентно-весовом суммировании амплитуд импульсов пачки и сравнении накопленной суммы с порогом в соответствии с формулой
где хn - амплитуда n-го импульса в пачке из N импульсов на выходе детектора; an - весовой коэффициент для n-го импульса, μ - порог обнаружения, определяемый по заданной величине вероятности ложной тревоги [Кузьмин С.З. Цифровая обработка радиолокационной информации. - М.: Советское радио, 1967, с.79, 80; Теоретические основы радиолокации: Учебное пособие для вузов. /Под ред. Я.Д.Ширмана. - М.: Советское радио, 1970, с.155, 156]. Такой способ обработки пачки радиоимпульсов обеспечивает максимальную вероятность правильного обнаружения при заданной величине вероятности ложной тревоги, т.к. он удовлетворяет критерию Неймана-Пирсона.
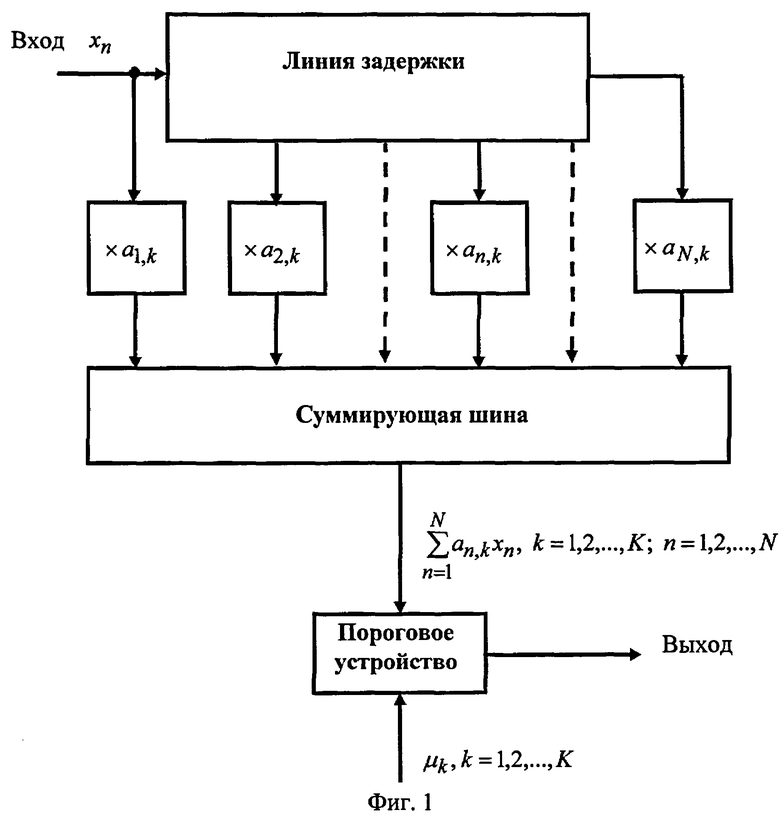
Известно устройство последетекторной обработки пачки радиоимпульсов, реализующее способ некогерентно-весового суммирования амплитуд импульсов в пачке [Кузьмин С.З. Цифровая обработка радиолокационной информации. - М.: Советское радио, 1967, с.80; Теоретические основы радиолокации: Учебное пособие для вузов. /Под ред. Я.Д.Ширмана. - М.: Советское радио, 1970, с.157], состоящее из линии задержки с отводами, подключаемыми через весовые усилители с коэффициентами передачи аn к сумматору (число отводов линии равно числу N импульсов в пачке, а задержка между точками включения - периоду повторения импульсов). В некоторый момент времени на выходе сумматора в результате некогерентно-весового накопления получается сигнал, равный  сравниваемый с порогом обнаружения μ .
сравниваемый с порогом обнаружения μ .
Известен способ обнаружения и классификации целей, основанный на сопоставлении пачки радиолокационных импульсов, представленной вектором, компонентами которого являются амплитуды импульсов с набором образ-векторов, компонентами которых являются устанавливаемые в соответствии с образом цели весовые коэффициенты, осуществляемым в результате вычисления их взаимокорреляционных функций (некогерентно-весовое накопление пачки импульсов) и сравнении результатов вычисления с порогами [Справочник по радиолокации. В 4-х томах. T.1. /Под ред. М.Сколника. - М.: Советское радио, 1976, с.211, 212], взятый в качестве прототипа.
Известно устройство последетекторной обработки пачки радиоимпульсов, реализующее взаимокорреляционный способ обнаружения и классификации целей, состоящий в сопоставлении пачки радиолокационных импульсов, представленной вектором, компонентами которого являются амплитуды импульсов, с набором образ-векторов различных целей [Справочник по радиолокации. В 4-х томах. Т.1. /Под ред. М.Сколника. - М.: Советское радио, 1976, с.212], изображенное на фиг.1, выбранное в качестве прототипа. Типичное устройство, осуществляющее взаимокорреляционное обнаружение и классификацию целей, содержит набор из К последовательно соединенных корреляторов (некогерентно-весовых накопителей) и пороговых устройств по схеме фиг.1, на которые подается один и тот же испытуемый сигнал xn, n=1, 2,... , N. Решение о наличии или отсутствии цели конкретного класса, например, типа k принимается на основе сравнения результатов некогерентно-весового накопления  k=1, 2,... , K, с порогами μ k.
k=1, 2,... , K, с порогами μ k.
Если Zk≥μ k, то принимается решение dk об обнаружении цели типа k. Если ни в одном из каналов превышения порога не произошло, т.е. Zk<μ k для всех k=1, 2,... , К, то выносится решение d0 о том, что в наблюдаемом сигнале присутствует только шум.
Способ и устройство последетекторной обработки пачки радиоимпульсов, выбранные в качестве прототипа, так же, как указанные выше аналогичные способы и устройства, решая задачу обнаружения (классификации) целей, не обеспечивают однозначного определения дальности и нуждаются для устранения неоднозначности в дополнительных устройствах, работа которых основана на использовании специального кодирования сигналов, излучаемых радиолокационной станцией. Одним из вариантов кодирования является использование нескольких частот повторения, т.е. вобуляция зондирующих импульсов. При приеме отраженного вобулированного сигнала, если цель находится в рабочей зоне, ограниченной максимальной однозначно измеряемой дальностью, пачка эхо-сигналов, соответствующих одному кольцу дальности, будет содержать все N импульсов. Для целей, находящихся за пределами рабочей зоны, вобуляция излучаемых импульсов приводит к чередованию наличия и пропуска импульсов в пачке эхо-сигналов. Количество пропущенных импульсов, а также размещение наличных импульсов в пачке, зависит от количества используемых частот повторения зондирующих импульсов.
Основной задачей, решаемой предлагаемым способом последетекторной обработки вобулированной пачки радиоимпульсов с неизвестными начальными фазами, является построение обнаружителя-классификатора, устраняющего неоднозначность определения дальности до обнаруженной цели, обеспечивающего наибольшую вероятность правильного обнаружения цели при наперед заданной величине вероятности ложной тревоги и позволяющего классифицировать цели по признаку ее принадлежности к целям, находящимся в рабочей зоне радиолокационной станции.
Указанный технический результат достигается тем, что в известном способе последетекторной обработки вобулированной пачки радиоимпульсов с неизвестными начальными фазами, заключающемся в том, что осуществляют некогерентно-весовое накопление пачки и сравнивают полученную сумму с порогом, дополнительно с обнаружением осуществляют классификацию цели по признаку ее принадлежности к целям, находящимся в рабочей зоне радиолокатора. При этом пачку, состоящую из N импульсов, интерпретируют как N-мерный вектор  , n=1,2,... ,N, компонентами которого являются значения амплитуды импульсов xn, а К - мерное пространство возможных образов вектора
, n=1,2,... ,N, компонентами которого являются значения амплитуды импульсов xn, а К - мерное пространство возможных образов вектора  разделяют на два множества Y1 и Y2, содержащих N-мерные образы-векторы
разделяют на два множества Y1 и Y2, содержащих N-мерные образы-векторы  , k=1, 2, 3,... , K, n=1, 2,... ,N, один из которых относится к образам целей, находящимся в рабочей зоне радиолокатора, а другие - к образам целей, расположенным за пределами рабочей зоны радиолокатора, в множество Y1 включают единственный вектор, для определенности, например, вектор
, k=1, 2, 3,... , K, n=1, 2,... ,N, один из которых относится к образам целей, находящимся в рабочей зоне радиолокатора, а другие - к образам целей, расположенным за пределами рабочей зоны радиолокатора, в множество Y1 включают единственный вектор, для определенности, например, вектор  , j∈ 1, 2,... , К, в качестве которого выбирают вектор с компонентами уj,n, являющимися весовыми коэффициентами некогерентно-весового накопителя, а в множество Y2 включают остальные К-1 образ-векторы
, j∈ 1, 2,... , К, в качестве которого выбирают вектор с компонентами уj,n, являющимися весовыми коэффициентами некогерентно-весового накопителя, а в множество Y2 включают остальные К-1 образ-векторы  , k=1, 2, 3,... , j-1, j+1,... , K, которые образованы из вектора
, k=1, 2, 3,... , j-1, j+1,... , K, которые образованы из вектора  в результате приравнивания к нулю некоторых компонент уj,n (количество векторов К-1, входящих в множество Y2, положение ненулевых и нулевых компонент образ-векторов целей, находящихся в нерабочей зоне радиолокационной станции, определяют по количеству используемых частот повторения зондирующих импульсов), и в соответствии со статистической теорией распознавания образов принятие решения о принадлежности вектора
в результате приравнивания к нулю некоторых компонент уj,n (количество векторов К-1, входящих в множество Y2, положение ненулевых и нулевых компонент образ-векторов целей, находящихся в нерабочей зоне радиолокационной станции, определяют по количеству используемых частот повторения зондирующих импульсов), и в соответствии со статистической теорией распознавания образов принятие решения о принадлежности вектора  к множеству Y1 или Y2 осуществляют в результате выбора номера масштабированного в соответствии с уровнем принятых импульсов в пачке образ-вектора
к множеству Y1 или Y2 осуществляют в результате выбора номера масштабированного в соответствии с уровнем принятых импульсов в пачке образ-вектора  , для которого квадрат геометрического расстояния до вектора
, для которого квадрат геометрического расстояния до вектора  минимален, иными словами, принятие решения осуществляют в результате минимизации функционала
минимален, иными словами, принятие решения осуществляют в результате минимизации функционала  , где
, где  - масштабный множитель, увеличивающий многообразие векторов
- масштабный множитель, увеличивающий многообразие векторов  за счет изменения уровня их компонент и минимизирующий функционал
за счет изменения уровня их компонент и минимизирующий функционал  - норма вектора z; (z, z) - скалярное произведение векторов; индекс T обозначает транспонирование вектора-строки
- норма вектора z; (z, z) - скалярное произведение векторов; индекс T обозначает транспонирование вектора-строки  . Считают (принимают решение d1), что цель обнаружена и находится в рабочей зоне радиолокатора, если одновременно выполняются два условия:
. Считают (принимают решение d1), что цель обнаружена и находится в рабочей зоне радиолокатора, если одновременно выполняются два условия:
А) функционал Еk минимален для k=j, т.е. 
Б) векторное произведение  превышает пороговую константу μ , в крайнем случае равно ей, т.е.
превышает пороговую константу μ , в крайнем случае равно ей, т.е.  , где μ - порог обнаружения, определяемый по заданной вероятности ложной тревоги.
, где μ - порог обнаружения, определяемый по заданной вероятности ложной тревоги.
Если одно из приведенных условий не выполняется, то принимают решение d0 том, что анализируемая пачка импульсов классифицируется как принадлежащая либо цели, находящейся за пределами рабочей зоны радиолокатора (не выполняется условие А), либо шуму (не выполняется условие Б).
В предлагаемом устройстве, реализующем предлагаемый способ обработки вобулированной пачки радиоимпульсов, указанный технический результат достигается тем, что в известное устройство, содержащее последовательно включенные некогерентно-весовой накопитель и пороговое устройство (ПУ) с порогом μ , введены дополнительно первое и второе постоянные запоминающие устройства (ПЗУ1) и (ПЗУ 2), хранящие соответственно образ-векторы  целей, относящиеся к множествам Y1 и Y2, и коэффициенты
целей, относящиеся к множествам Y1 и Y2, и коэффициенты  , используемые для вычисления масштабных множителей gk, блоки вычитания и умножения векторов (БВВ) и (БУВ2), умножения вектора на скаляр (БУВС) и скалярного умножения (БСУ), в которых осуществляется вычисление значений функционала Еk для каждого из образ-векторов
, используемые для вычисления масштабных множителей gk, блоки вычитания и умножения векторов (БВВ) и (БУВ2), умножения вектора на скаляр (БУВС) и скалярного умножения (БСУ), в которых осуществляется вычисление значений функционала Еk для каждого из образ-векторов  множеств Y1 и Y2, а также блок выбора номера образ-вектора (БВН), в котором определяется номер образ-вектора, соответствующий минимуму функционала Еk, и схема совпадения (СС), обеспечивающая формирование сигнала, соответствующего принятию решения d1 о том, что цель обнаружена и находится в пределах рабочей зоны радиолокатора, причем некогерентно-весовой накопитель выполнен в виде первого блока умножения векторов (БУВ1). Кроме того, в устройство между некогерентно-весовым накопителем БУВ1 и пороговым устройством ПУ введен мультиплексор (МП). Для синхронизации работы всех блоков предлагаемого устройства введен блок управления (БУ).
множеств Y1 и Y2, а также блок выбора номера образ-вектора (БВН), в котором определяется номер образ-вектора, соответствующий минимуму функционала Еk, и схема совпадения (СС), обеспечивающая формирование сигнала, соответствующего принятию решения d1 о том, что цель обнаружена и находится в пределах рабочей зоны радиолокатора, причем некогерентно-весовой накопитель выполнен в виде первого блока умножения векторов (БУВ1). Кроме того, в устройство между некогерентно-весовым накопителем БУВ1 и пороговым устройством ПУ введен мультиплексор (МП). Для синхронизации работы всех блоков предлагаемого устройства введен блок управления (БУ).
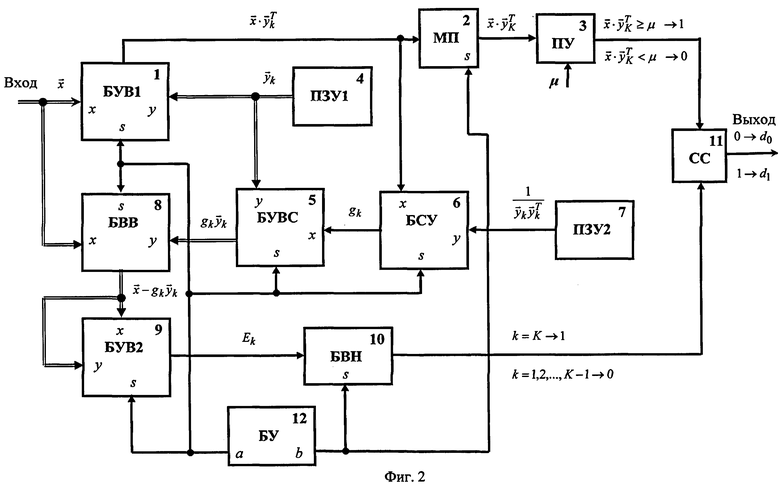
Вход у БУВ1 соединен с выходом ПЗУ1 и входом у БУВС, выход которого  соединен с входом у БВВ, вход х которого объединен с входом х БУВ1 (входом устройства), а выход соединен с входами х, у БУВ2, выход которого соединен с входом БВН, выход которого соединен с одним входом СС, другой вход которой соединен с выходом ПУ, вход которого соединен через МП с выходом БУВ1, а выход СС является выходом устройства, вход х БУВС соединен с выходом БСУ (gk), входы х и у которого соединены соответственно с выходом БУВ1, соединенным с входом МП, и выходом ПЗУ2. Выход а БУ соединен с объединенными управляющими входами s блоков БУВ1, БВВ, БУВ2, БУВС и БСУ, а выход b - с объединенными управляющими входами s МП и БВН.
соединен с входом у БВВ, вход х которого объединен с входом х БУВ1 (входом устройства), а выход соединен с входами х, у БУВ2, выход которого соединен с входом БВН, выход которого соединен с одним входом СС, другой вход которой соединен с выходом ПУ, вход которого соединен через МП с выходом БУВ1, а выход СС является выходом устройства, вход х БУВС соединен с выходом БСУ (gk), входы х и у которого соединены соответственно с выходом БУВ1, соединенным с входом МП, и выходом ПЗУ2. Выход а БУ соединен с объединенными управляющими входами s блоков БУВ1, БВВ, БУВ2, БУВС и БСУ, а выход b - с объединенными управляющими входами s МП и БВН.
Предлагаемые способ и устройство последетекторной обработки вобулированной пачки радиоимпульсов решают одну и ту же задачу - обнаружение пачки импульсов с максимальной вероятностью правильного обнаружения при заданной вероятности ложной тревоги и классификация целей по признаку их принадлежности к целям, находящимся в рабочей зоне радиолокатора, что свидетельствует о соблюдении требования единства изобретения.
На фиг.1 изображена структурная схема устройства (прототип), реализующего выбранный в качестве прототипа способ обработки сигналов; на фиг.2 - структурная схема предлагаемого устройства, с помощью которого реализуется предлагаемый способ; на фиг.3 - временные диаграммы выходных сигналов блока управления (БУ), синхронизирующего работу составных частей предлагаемого устройства.
Предлагаемый способ последетекторной обработки вобулированной пачки радиоимпульсов осуществляют в результате вычисления меры сходства N-мерного вектора  , n=1, 2,... , N, компоненты хn которого представляют собой амплитуды импульсов в обрабатываемой пачке, с совокупностью образ-векторов
, n=1, 2,... , N, компоненты хn которого представляют собой амплитуды импульсов в обрабатываемой пачке, с совокупностью образ-векторов  , k=1, 2,... , K, n=1, 2,... ,N, задающих разбиение пространства существования образов вектора
, k=1, 2,... , K, n=1, 2,... ,N, задающих разбиение пространства существования образов вектора  на два множества Y1 и Y2 (Y1 - множество, состоящее из образ-вектора
на два множества Y1 и Y2 (Y1 - множество, состоящее из образ-вектора  цели, находящейся в рабочей зоне, Y2 - множество образ-векторов цели, находящейся вне рабочей зоны радиолокационной станции). В качестве меры сходства выбран квадрат геометрического расстояния от вектора
цели, находящейся в рабочей зоне, Y2 - множество образ-векторов цели, находящейся вне рабочей зоны радиолокационной станции). В качестве меры сходства выбран квадрат геометрического расстояния от вектора  до каждого из масштабированных векторов
до каждого из масштабированных векторов  множеств Y1 и Y2, который определяется функционалом
множеств Y1 и Y2, который определяется функционалом  , k=1, 2,... , K. Числовое значение масштабного множителя
, k=1, 2,... , K. Числовое значение масштабного множителя  определено как решение уравнения
определено как решение уравнения  т.е. является результатом отыскания минимума функционала Еk как функции от gk. Таким образом, для принятия решения о том, что цель обнаружена и находится в рабочей зоне радиолокационной станции, вычисляют:
т.е. является результатом отыскания минимума функционала Еk как функции от gk. Таким образом, для принятия решения о том, что цель обнаружена и находится в рабочей зоне радиолокационной станции, вычисляют:
векторные произведения 
, k=1, 2,... , К;
- масштабные множители  , k=1, 2,... , К;
, k=1, 2,... , К;
- значения функционала  , k=1, 2,... , К.
, k=1, 2,... , К.
Факт обнаружения цели устанавливают в результате проверки выполнения условия  . Из вычисленных К значений Еk выбирают минимальное значение Еk. Если индекс i, при котором
. Из вычисленных К значений Еk выбирают минимальное значение Еk. Если индекс i, при котором  , относится к множеству Y1(i=j), то считают, что обнаруженная цель находится в рабочей зоне, а признак обнаружения передают в последующие устройства обработки радиолокационной информации, в противном случае, когда индекс i, при котором
, относится к множеству Y1(i=j), то считают, что обнаруженная цель находится в рабочей зоне, а признак обнаружения передают в последующие устройства обработки радиолокационной информации, в противном случае, когда индекс i, при котором  , относится к множеству Y2=(i≠ j), то считают, что обнаруженная цель находится вне рабочей зоны, обнаруженную цель относят к целям, движущимся за пределами рабочей зоны радиолокатора, и признак обнаружения подавляют.
, относится к множеству Y2=(i≠ j), то считают, что обнаруженная цель находится вне рабочей зоны, обнаруженную цель относят к целям, движущимся за пределами рабочей зоны радиолокатора, и признак обнаружения подавляют.
Предлагаемое устройство содержит некогерентно-весовой накопитель, выполненный в виде блока умножения векторов (БУВ1) 1, вход х которого является входом устройства, выход соединен через мультиплексор (МП) 2 с входом порогового устройства (ПУ) 3, а вход у - с выходом постоянного запоминающего устройства (ПЗУ1) 4, хранящего набор образ-векторов целей  , k=1, 2,... , K, содержащий вектор весовых коэффициентов
, k=1, 2,... , K, содержащий вектор весовых коэффициентов  (для определенности и иллюстрации работы предлагаемого устройства принято j=К), интерпретируемый как образ цели, находящейся в рабочей зоне радиолокатора, и К-1 образ-векторов
(для определенности и иллюстрации работы предлагаемого устройства принято j=К), интерпретируемый как образ цели, находящейся в рабочей зоне радиолокатора, и К-1 образ-векторов  , k=1, 2, 3,... , К-1, цели, находящейся за пределами рабочей зоны, классификация производится в результате минимизации квадрата геометрического расстояния от масштабированного образ-вектора, хранящегося в устройстве 4 (ПЗУ1), до вектора, представленного пачкой импульсов, и заключается в выборе номера образ-вектора, соответствующего минимуму геометрического расстояния, причем для вычисления масштабного множителя, минимизирующего геометрическое расстояние, в устройство дополнительно введены блок умножения вектора на скаляр (БУВС) 5, вход у которого соединен с выходом устройства 4 (ПЗУ1), блок скалярного умножителя (БСУ) 6, вход х которого соединен с выходом блока 1 (БУВ1) и входом устройства 2 (МП), а выход - с входом x блока 5 (БУВС), второе постоянное запоминающее устройство (ПЗУ2) 7, хранящее набор коэффициентов, предназначенных для вычисления масштабных множителей, выход которого соединен с входом у блока 6 (БСУ), и для вычисления квадрата геометрического расстояния между вектором-образом и вектором, представленным обнаруженной пачкой импульсов, введены блок вычитания векторов (БВВ) 8 и второй блок умножения векторов (БУВ2) 9, входы x и у которого объединены и соединены с выходом блока 8 (БВВ), вход х которого соединен с входом блока 1 (БУВ1), а вход у - с выходом блока 5 (БУВС), выход блока 9 (БУВ2) через дополнительный последовательно соединенный блок выбора номера (БВН) 10 подключен к первому входу схемы совпадения (СС) 11, второй вход которой соединен с выходом устройства 3 (ПУ), выход схемы 11 (СС) является выходом устройства. Блок 10 (БВН) выбирает номер образ-вектора, минимизирующего функционал Еk, а схема 11 (СС) обеспечивает формирование сигнала, соответствующего принятию решения об обнаружении цели и нахождении ее в пределах рабочей зоны радиолокатора. Синхронизация работы составных частей устройства осуществляется блоком управления (БУ) 12, выход а которого соединен с объединенными управляющими входами s блоков 1 (БУВ1), 5 (БУВС), 6 (БСУ), 8 (БВВ), 9 (БУВ2), а выход b - с объединенными управляющими входами s блоков 2 (МП) и 10 (БВН).
, k=1, 2, 3,... , К-1, цели, находящейся за пределами рабочей зоны, классификация производится в результате минимизации квадрата геометрического расстояния от масштабированного образ-вектора, хранящегося в устройстве 4 (ПЗУ1), до вектора, представленного пачкой импульсов, и заключается в выборе номера образ-вектора, соответствующего минимуму геометрического расстояния, причем для вычисления масштабного множителя, минимизирующего геометрическое расстояние, в устройство дополнительно введены блок умножения вектора на скаляр (БУВС) 5, вход у которого соединен с выходом устройства 4 (ПЗУ1), блок скалярного умножителя (БСУ) 6, вход х которого соединен с выходом блока 1 (БУВ1) и входом устройства 2 (МП), а выход - с входом x блока 5 (БУВС), второе постоянное запоминающее устройство (ПЗУ2) 7, хранящее набор коэффициентов, предназначенных для вычисления масштабных множителей, выход которого соединен с входом у блока 6 (БСУ), и для вычисления квадрата геометрического расстояния между вектором-образом и вектором, представленным обнаруженной пачкой импульсов, введены блок вычитания векторов (БВВ) 8 и второй блок умножения векторов (БУВ2) 9, входы x и у которого объединены и соединены с выходом блока 8 (БВВ), вход х которого соединен с входом блока 1 (БУВ1), а вход у - с выходом блока 5 (БУВС), выход блока 9 (БУВ2) через дополнительный последовательно соединенный блок выбора номера (БВН) 10 подключен к первому входу схемы совпадения (СС) 11, второй вход которой соединен с выходом устройства 3 (ПУ), выход схемы 11 (СС) является выходом устройства. Блок 10 (БВН) выбирает номер образ-вектора, минимизирующего функционал Еk, а схема 11 (СС) обеспечивает формирование сигнала, соответствующего принятию решения об обнаружении цели и нахождении ее в пределах рабочей зоны радиолокатора. Синхронизация работы составных частей устройства осуществляется блоком управления (БУ) 12, выход а которого соединен с объединенными управляющими входами s блоков 1 (БУВ1), 5 (БУВС), 6 (БСУ), 8 (БВВ), 9 (БУВ2), а выход b - с объединенными управляющими входами s блоков 2 (МП) и 10 (БВН).
Предлагаемое устройство, реализующее заявляемый способ, работает следующим образом (на фиг.2 стрелками с двойными линиями показаны пути передачи векторных сигналов).
На вход устройства (объединенные входы х блоков 1 (БУВ1) и 8 (БВВ)) поступает пачка импульсов, представленная вектором  . На вход у блока 1 (БУВ1) поступают образ-векторы
. На вход у блока 1 (БУВ1) поступают образ-векторы  , хранящиеся в блоке 4 (ПЗУ1). В блоке 1 (БУВ1) вычисляются векторные произведения
, хранящиеся в блоке 4 (ПЗУ1). В блоке 1 (БУВ1) вычисляются векторные произведения  используемые для вычисления в блоке 6 (БСУ) масштабных множителей, являющихся скалярным произведением вычисленных в блоке 1 (БУВ1) значений
используемые для вычисления в блоке 6 (БСУ) масштабных множителей, являющихся скалярным произведением вычисленных в блоке 1 (БУВ1) значений  , поступающих на вход х блока 6 (БСУ), и коэффициентов
, поступающих на вход х блока 6 (БСУ), и коэффициентов  , хранящихся в блоке 7 (ПЗУ2) и поступающих на вход у блока 6 (БСУ). Масштабные множители gк с выхода блока 6 (БСУ) поступают на вход х блока 5 (БУВС), на вход у которого поступают из блока 4 (ПЗУ1) образ-векторы
, хранящихся в блоке 7 (ПЗУ2) и поступающих на вход у блока 6 (БСУ). Масштабные множители gк с выхода блока 6 (БСУ) поступают на вход х блока 5 (БУВС), на вход у которого поступают из блока 4 (ПЗУ1) образ-векторы  . В блоке 5 (БУВС) вычисляются произведения
. В блоке 5 (БУВС) вычисляются произведения  поступающие на вход у блока 8 (БВВ). В блоке 8 (БВВ) вычисляется вектор
поступающие на вход у блока 8 (БВВ). В блоке 8 (БВВ) вычисляется вектор  , являющийся разностью векторов
, являющийся разностью векторов  и
и  поступающий на объединенные входы х и у блока 9 (БУВ2), на выходе которого формируются К значений функционала
поступающий на объединенные входы х и у блока 9 (БУВ2), на выходе которого формируются К значений функционала  .
.
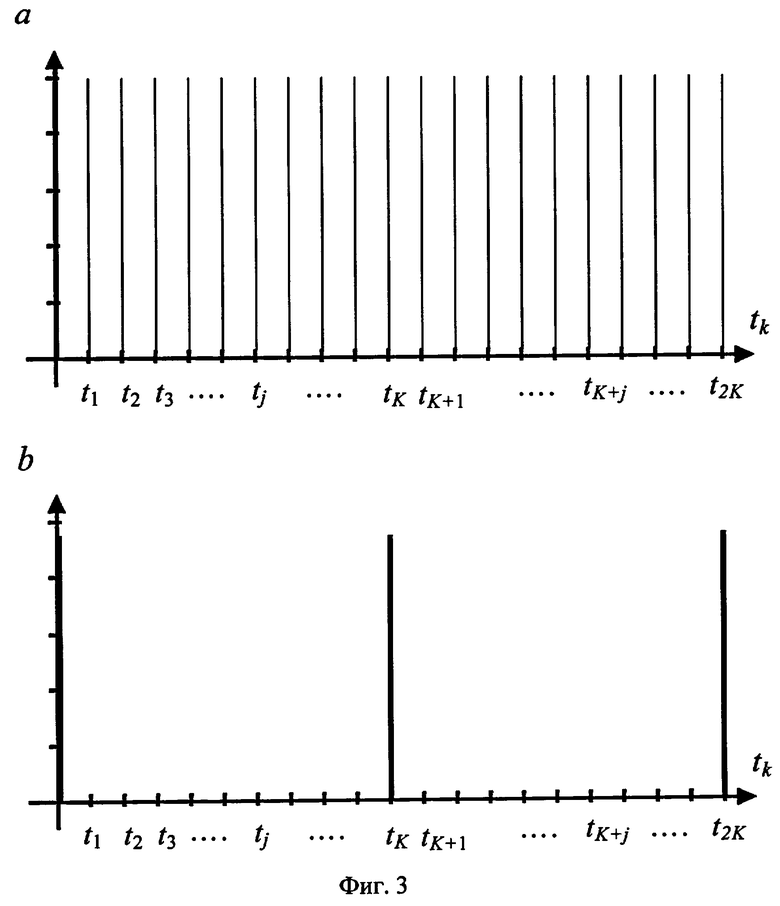
Работа блоков 1 (БУВ1), 5 (БУВС), 6 (БСУ), 8 (БВВ), 9 (БУВ2) тактируется сигналами с выхода а блока 12 (БУ). На фиг.3а управляющие сигналы с выхода а блока 12 (БУ) изображены в зависимости от моментов дискретного времени tk и представляют собой последовательность импульсов (за К управляющих сигналов в моменты времени t1, t2, t3, ... , tj, ... , tK вычисляются все К значений функционала Еk, необходимые для определения принадлежности вектора  к множеству Y1 или Y2, т.е. для классификации цели по признаку ее принадлежности к целям, находящимся в рабочей зоне радиолокатора; далее процесс управления в моменты времени tK+1, tK+2, tK+3, ... , tK+j, ... , t2K осуществляется для нового вектора
к множеству Y1 или Y2, т.е. для классификации цели по признаку ее принадлежности к целям, находящимся в рабочей зоне радиолокатора; далее процесс управления в моменты времени tK+1, tK+2, tK+3, ... , tK+j, ... , t2K осуществляется для нового вектора  , поступающего на вход предлагаемого устройства).
, поступающего на вход предлагаемого устройства).
Тактирование блоков 2 (МП) и 10 (БВН) производится сигналами с выхода b блока 12 (БУ), временное положение которых определяется моментом времени окончания вычислений всех К значений функционала Еk (на фиг.3b - это моменты времени tK, t2K и т.д. при дальнейшем анализе поступающих векторов  ).
).
Вычисленные значения Еk поступают в блок 10 (БВН), на выходе которого формируется сигнал, равный 1, если минимальное значение функционала Еk достигается для k=K, т.е., если вектор  наиболее похож на образ-вектор
наиболее похож на образ-вектор  , образующий множество Y1. В противном случае на выходе блока 10 (БВН) формируется сигнал, равный нулю. Из всей последовательности значений
, образующий множество Y1. В противном случае на выходе блока 10 (БВН) формируется сигнал, равный нулю. Из всей последовательности значений  , k=1, 2, ... , К с выхода блока 1 (БУВ1) только векторное произведение
, k=1, 2, ... , К с выхода блока 1 (БУВ1) только векторное произведение  подается через мультиплексор 2 (МП) на вход устройства 3 (ПУ), где сравнивается со значением порога μ , задающего требуемое значение ложной тревоги. На выходе устройства 3 (ПУ) формируется сигнал, равный 1, если
подается через мультиплексор 2 (МП) на вход устройства 3 (ПУ), где сравнивается со значением порога μ , задающего требуемое значение ложной тревоги. На выходе устройства 3 (ПУ) формируется сигнал, равный 1, если  , и равный 0, если
, и равный 0, если  .
.
Сигналы с выходов устройства 3 (ПУ) и блока 10 (БВН) поступают на соответствующие входы схемы 11 (СС), на выходе которой формируется сигнал, равный 1, если  и
и  , т.е. принимается решение d1 о том, что наблюдаемый вектор
, т.е. принимается решение d1 о том, что наблюдаемый вектор  соответствует цели и она находится в пределах рабочей зоны радиолокатора. Если
соответствует цели и она находится в пределах рабочей зоны радиолокатора. Если  или
или  достигается для k≠ К, то на выходе схемы 11 (СС) (выходе предлагаемого устройства) формируется сигнал, равный 0 и соответствующий принятию решения d0 о том, что наблюдаемый вектор
достигается для k≠ К, то на выходе схемы 11 (СС) (выходе предлагаемого устройства) формируется сигнал, равный 0 и соответствующий принятию решения d0 о том, что наблюдаемый вектор  представляет собой пачку импульсов, которая является шумом или относится к цели, расположенной за пределами рабочей зоны радиолокатора.
представляет собой пачку импульсов, которая является шумом или относится к цели, расположенной за пределами рабочей зоны радиолокатора.
Предлагаемые способ и устройство позволяют наряду с обнаружением цели производить ее классификацию, что делает процесс обнаружения цели более достоверным и надежным.
Изобретение относится к средствам радиолокации и предназначено для обнаружения и классификации цели по признаку ее принадлежности к целям, находящимся в зоне однозначного измерения дальности импульсного радиолокатора, т.е. в рабочей зоне радиолокатора. Технический результат - повышение достоверности обнаружения цели и расширение функциональных возможностей путем классификации цели по принадлежности. Способ последетекторной обработки вобулированной пачки радиоимпульсов, основанный на некогерентно-весовом накоплении пачки из N импульсов, сопоставлении ее с набором образ-векторов, вычислении взаимокорреляционной функции и сравнении ее с порогом, снабжен операцией классификации цели по признаку ее принадлежности к цели, находящейся в рабочей зоне радиолокатора, осуществляемой путем минимизации функционала  . Устройство содержит последовательно соединенные некогерентно-весовой накопитель и пороговое устройство. В устройство дополнительно включены два постоянных запоминающих устройства, блоки умножения и вычитания векторов, умножения вектора на скаляр, скалярного умножения, выбора номера образ-вектора и схема совпадения, причем накопитель выполнен в виде блока умножения векторов. 2 н.п.ф-лы, 4 ил.
. Устройство содержит последовательно соединенные некогерентно-весовой накопитель и пороговое устройство. В устройство дополнительно включены два постоянных запоминающих устройства, блоки умножения и вычитания векторов, умножения вектора на скаляр, скалярного умножения, выбора номера образ-вектора и схема совпадения, причем накопитель выполнен в виде блока умножения векторов. 2 н.п.ф-лы, 4 ил.
 , компонентами которого являются амплитуды импульсов хn, где n=1, 2,..., N, и набора образ-векторов
, компонентами которого являются амплитуды импульсов хn, где n=1, 2,..., N, и набора образ-векторов  , где k=1, 2, 3,..., К, а n=1, 2,..., N, вычисляют взаимокорреляционные функции
, где k=1, 2, 3,..., К, а n=1, 2,..., N, вычисляют взаимокорреляционные функции  , где индекс Т означает транспонирование вектора-строки
, где индекс Т означает транспонирование вектора-строки  , и сравнивают взаимокорреляционную функцию
, и сравнивают взаимокорреляционную функцию  ,
,  , где
, где  - образ цели, находящейся в рабочей зоне, с порогом μ, задающим требуемую вероятность ложной тревоги, отличающийся тем, что дополнительно осуществляют классификацию цели по признаку ее принадлежности к целям, находящимся в рабочей зоне радиолокатора, путем поиска минимума функционала
- образ цели, находящейся в рабочей зоне, с порогом μ, задающим требуемую вероятность ложной тревоги, отличающийся тем, что дополнительно осуществляют классификацию цели по признаку ее принадлежности к целям, находящимся в рабочей зоне радиолокатора, путем поиска минимума функционала  , являющегося по сути квадратом геометрического расстояния от вектора
, являющегося по сути квадратом геометрического расстояния от вектора  до масштабированных образ-векторов
до масштабированных образ-векторов  , разбивающих пространство существования вектора
, разбивающих пространство существования вектора  на два множества, одно из которых включает образ-вектор
на два множества, одно из которых включает образ-вектор  цели, находящейся в рабочей зоне, а другое - К-1 образ-векторов целей, находящихся вне рабочей зоны радиолокатора, при этом решение об обнаружении цели, находящейся в пределах рабочей зоны радиолокатора, принимают, если Еk минимален при k=j
цели, находящейся в рабочей зоне, а другое - К-1 образ-векторов целей, находящихся вне рабочей зоны радиолокатора, при этом решение об обнаружении цели, находящейся в пределах рабочей зоны радиолокатора, принимают, если Еk минимален при k=j
где 
- масштабный множитель, минимизирующий функционал Еk.
| Справочник по радиолокации./Под ред | |||
| М | |||
| Сколника | |||
| - М.: Советское радио, 1976, т.1, с.211 и 212 | |||
| Теоретические основы радиолокации | |||
| Учебное пособие для вузов./Под ред | |||
| Я.Д | |||
| Ширмана | |||
| - М.: Советское радио, 1970, с.155 и 156, 158 и 159 | |||
| КУЗЬМИН С.З | |||
| Цифровая обработка радиолокационной информации | |||
| - М.: Советское радио, 1967, с.79 и 80 | |||
| Управляемая линия задержки пачки радиоимпульсов | 1990 |
|
SU1837381A1 |

