Изобретение относится к средствам радиолокации и предназначено для классификации цели по признаку ее принадлежности к целям, находящимся в зоне неоднозначного и однозначного измерения дальности импульсного радиолокатора, т.е. в нерабочей и рабочей зонах радиолокатора, а также для обеспечения однозначных измерений дальности.
Известно устройство обеспечения однозначности измерения дальности, при котором однозначность измерения дальности обеспечивается дополнительным кодированием излучаемых импульсных сигналов [Справочник по радиоэлектронным системам. Т.2. // Под ред. Б.Х.Кривицкого. - М.: Энергия, 1979, стр.99, рис.7-33]. Одним из вариантов кодирования является использование нескольких частот повторения импульсов. Наиболее простым методом является формирование двух последовательностей U1 и U2 с частотами повторения F1 и F2 соответственно (F1 не кратно F2). Последовательности U1 и U2 образованы из опорной последовательности Uоп путем деления частоты. Период следования импульсов опорной последовательности Топ больше периодов образованных последовательностей. При отражении от цели импульсы последовательностей, поступающие на схему обработки для устранения неоднозначных измерений, не совпадают по времени между собой, кроме одного раза за период опорной частоты. Таким образом, используя совпадающие импульсы дочерних последовательностей и опорную последовательность, можно измерить дальность до цели однозначно. При использовании данного устройства нет возможности сделать классификацию целей по признаку дальности, а часть эхо-сигналов не анализируется, не накапливается, что приводит к снижению качества обнаружения сигналов.
Устройство устранения неоднозначных измерений дальности до целей, находящихся за пределами рабочей зоны радиолокационной станции, выбранное в качестве прототипа [Кострова Т.Г., Матвиенко Е.В., Дыранов Ю.В., Соколик А.А. Методы, алгоритмы и устройства снижения уровня помех, обусловленных неоднозначностью измерений дальности в импульсных РЛС // Методы и устройства передачи и обработки информации: Межвузовский сборник научных трудов. Вып. 6. - СПб.: Гидрометеоиздат, 2004. - С.101-109.], так же как указанное выше аналогичное устройство, решает задачу разделения целей по признаку «Нормальная цель» (цели, находящаяся в пределах рабочей зоны радиолокатора) и «Зашкальная цель» (цели, находящяася за пределами рабочей зоны радиолокатора).
Прототип (фиг.1) состоит из следующих блоков: ОКО - основной канал обнаружения, ККО - канал критерийной обработки и ЛС И - логическая схема (здесь и далее двойными стрелками обозначено прохождение векторных сигналов или кодовых последовательностей, одинарными - битового потока, т.е. нулей или единиц). На вход ОКО и ККО поступают пачка сигналов Xi (i=1, …, N, где N - количество импульсов в пачке) с соответствующим кодом дальности Ri (код дальности имеет вид К разрядного слова, где старший разряд используется для разделения целей по принципу интервала однозначных и неоднозначных измерений дальности, а остальные К-1 разрядов используются для кодирования дальности) от целей, находящихся как в пределах, так и за пределами рабочей зоны радиолокатора. В одном из вариантов ОКО осуществляется некогерентно-весовое накопление пачки, результат которого сравнивается с порогом. Классификация осуществляется на основе сравнения эталонных образ-векторов пачек импульсов и образ-векторов пачек импульсов эхо-сигналов. В ОКО и ККО сигналы сравниваются с порогами, и выносится решение о вероятности появления того или иного сигнала. Пороги обнаружения в ОКО и классификации в ККО выбираются таким образом, чтобы для зашкальной цели критерий выполнялся с низкой вероятностью. Полученные признаки обнаружения ОКО объединяются с результатом классификации ККО в схеме ЛС И. На выходе логической схемы ЛС И отметки о зашкальных целях подавляются. Шкала дальности формируется после логической схемы ЛС И и содержит информацию только о дальности нормальных целей, поскольку все признаки обнаружения зашкальных целей подавляются. Следовательно, данное устройство не позволяет однозначно измерять дальность до зашкальных целей и использовать информацию о целях, находящихся за пределами рабочей зоны радиолокатора, и поэтому оно нуждается для устранения неоднозначности измерений и разделения целей по признакам в дополнительных устройствах, которые дополнительно обрабатывают информацию, поступающую с классификатора целей.
Основными задачами, решаемыми предлагаемым устройством устранения неоднозначных измерений дальности, являются: обнаружение целей; их классификация, обеспечивающая разделение целей по признаку «Нормальная цель» и «Зашкальная цель» для последующей обработки радиолокационной информации; устранение неоднозначности определения дальности до обнаруженной цели, если она находится за пределами рабочей по дальности зоны радиолокационной станции.
Указанный технический результат достигается тем, что в известном устройстве устранения неоднозначных измерений дальности до целей, находящихся за пределами рабочей зоны радиолокационной станции, осуществляется обнаружение и классификация целей по признаку их принадлежности к целям, находящимся в рабочей зоне радиолокатора, дополнительно осуществляют вычисление истинной дальности до целей и распределение целей по признаку «Нормальная цель» и «Зашкальная цель». Предполагается, что в радиолокационной станции осуществляется вобуляция межимпульсного интервала с использованием двух периодов следования зондирующих импульсов Т1 и Т2.
В предлагаемом устройстве (фиг.2) устранения неоднозначности измерения дальности до целей, находящихся за пределами рабочей зоны радиолокационной станции, указанный технический результат достигается тем, что в известное устройство, содержащее основной канал обработки (блок 1 - ОКО), канал критерийной обработки (блок 2 - ККО) и логическую схему «И» (блок 3 - ЛС И 1), введены дополнительно: вторая логическая схема «И» (блок 4 - ЛС И 2), логическая схема «Инверсия» (блок 5 - ЛС ИНВ), арифметико-логическое устройство (блок 6 - АЛУ), постоянное запоминающие устройство поправок (блок 7 - ПЗУ ПОПР) и постоянное запоминающее устройство хранения данных (блок 8 - ПЗУ хранения данных).
Блок 6 АЛУ, структура которого раскрыта на фиг.3, в свою очередь, содержит: четыре цифровых коммутатора (блок 6.1 - ЦИФР КОММ 1, блок 6.5 - ЦИФР КОММ 2, блок 6.7 - ЦИФР КОММ 3, блок 6.3 - ЦИФР КОММ 4), сумматор (блок 6.2 - СУММ), схему усреднения расстояния (блок 6.9 -УСР РАССТ), линию задержки на ΔT (блок 6.6 - ЛЗ на ΔТ), схему сравнения (блок 6.8 - СС) и схему «Операция подстановки бита» (блок 6.4 - ОПБ).
Вход Хi, являющийся входом предлагаемого устройства, соединен с входами блока 1 ОКО и блока 2 ККО (фиг.2). Выход блока 1 ОКО, в свою очередь, соединен с первым входом блока 4 ЛС И 2, выход которого соединен с входом №1 блока 6 АЛУ, и с первым входом блока 3 ЛС И 1, выход которого также соединен с входом №2 блока 6 АЛУ и, в свою очередь, с входом блока 5 Л С ИНВ. Выход блока 5 ЛС ИНВ соединен с вторым входом блока 4 ЛС И 2. Выход блока 2 ККО соединен с вторым входом блока 3 ЛС И 1 и с входом №3 блока 6 АЛУ. Выход блока 7 ПЗУ ПОПР соединен с входом №4 блока 6 АЛУ. Битовый выход блока 2 ККО также соединен с битовым входом №3 блока 6 АЛУ. Также на вход №5 блока 6 АЛУ поступают коды дальности целей Ri.
Блок 6 АЛУ, структура которого представлена на фиг.3, имеет следующие связи между блоками: выход блока 6.1 ЦИФР КОММ 1 соединен с входом блока 6.2 СУММ и с входом блока 6.3 ЦИФР КОММ 4. Выход блока 6.2 СУММ соединен с входом блока 6.5 ЦИФР КОММ 2, и с входами блока 6.8 СС и блока 6.3 ЦИФР КОММ 4. В свою очередь, выходы блока 6.5 ЦИФР КОММ 2 соединены с входом блока 6.6 ЛЗ на ΔТ, выход которого соединен с входом блока 6.7 ЦИФР КОММ 3, и с входом блока 6.9 УСР РАССТ. Выходы блока 6.7 ЦИФР КОММ 3 соединены с входом блока 6.9 УСР РАССТ и с входом блока 6.8 СС. Выход блока 6.9 УСР РАССТ соединен с входом блока 6.3 ЦИФР КОММ 4, выход которого соединен с входом блока 6.4 ОПБ. Выход блока 6.4 ОПБ соединен с входом ПЗУ хранения данных.
Предлагаемое устройство устранения неоднозначных измерений дальности до целей, находящихся за пределами рабочей зоны радиолокационной станции, решает следующие задачи:
- обнаружение пачки импульсов с максимальной вероятностью правильного обнаружения при заданной вероятности ложной тревоги;
- классификацию целей по признаку их принадлежности к целям, находящимся в рабочей и нерабочей зонах радиолокатора;
- однозначное измерение дальности до целей, находящихся за пределами рабочей зоны радиолокатора;
что свидетельствует о соблюдении требования единства изобретения.
На фиг.1 изображена структурная схема устройства (прототип), которое реализует выбранную обработку сигналов, на фиг.2 - структурная схема предлагаемого устройства, с помощью которого производится предлагаемая обработка сигналов, на фиг.3 - структурная схема арифметико-логического устройства для обработки кодов дальности Ri, пачек импульсов.
Предлагаемое устройство устранения неоднозначных измерений дальности до целей, находящихся за пределами рабочей зоны радиолокационной станции, осуществляет суммирование текущего кода дальности Ri обрабатываемой пачки импульсов Xi с кодом максимальной дальности предыдущего периода зондирования. Коды максимальной дальности предыдущего периода зондирования хранятся в блоке 7 ПЗУ ПОПР в виде поправок  ,
,  ,
,
где с - скорость распространения зондирующего сигнала,
Т1 и Т2 - использованные межимпульсные интервалы при вобуляции, которые выбираются из постоянного запоминающего устройства поправок (блоке 7 ПЗУ ПОПР) исходя из длительности предыдущего периода зондирования при помощи синхроимпульса «Начало рабочей дистанции» (НРД). После каждого синхроимпульса НРД извлекается только одна поправка, поправки меняются через период. Таким образом устраняется неоднозначное измерение дальности до целей, находящихся за пределами рабочей зоны радиолокационной станции.
Предлагаемое устройство (фиг.2) содержит ОКО (блок 1), выход которого соединен с входом ЛС И 1 (блок 3), и ККО (блок 2), выход которого также соединен с ЛС И 1 (блок 3) - данная схема позволяет отсеять только нормальные цели для последующей первичной обработки информации. Вводя в устройство ЛС И 2 (блок 4) и ЛС ИНВ (блок 5), которые соединены следующим образом: выход ОКО (блок 1) соединен с входом ЛС И 2 (блок 4), выход которого соединен с входом №1 АЛУ (блок 6). Выход ЛС И 1 (блок 3) соединен с входом №2 АЛУ (блок 6) и с входом ЛС ИНВ (блок 5), в свою очередь, выход которого соединен с входом ЛС И 2 (блок 4) - удается произвести разделение обнаруженных целей по признаку «Нормальная цель» и «Зашкальная цель». Дополнительное ПЗУ поправок (блок 7), выход которого соединен с входом №4 АЛУ (блок 6), позволяет хранить в нем поправки а1 и а2 для определения однозначной дальности до цели, находящейся за пределами рабочей зоны радиолокатора. Также на битовый вход №3 АЛУ (блок 6) подается поток бит с выхода ККО (блок 2), который используется АЛУ (блок 6) для подстановки бит в старший разряд кода дальности для облегчения выборки нормальных и зашкальных целей из ПЗУ хранения данных (блок 8). Выход АЛУ (блок 6) соединен с входом ПЗУ хранения данных (блок 8), который используется для накопления кодов дальности зашкальных и нормальных целей.
Блок 6 АЛУ (Фиг.3) содержит четыре цифровых коммутатора, с помощью которых производится управление потоком кодов дальности целей. Линия задержки на ΔT используется блоком 6.8 (СС) при анализе текущего и предыдущего кодов дальности целей. Схема сравнения (блок 6.8) управляет тремя цифровыми коммутаторами (ЦИФР КОММ 2, ЦИФР КОММ 3, ЦИФР КОММ 4). Данный блок имеет два входа, которые используются для приема кодов дальности, и три управляющих выхода (выход №1, выход №2 и выход №3 блока 6.8), которые используются для управления цифровыми коммутаторами (ЦИФР КОММ 2, ЦИФР КОММ 3, ЦИФР КОММ 4). Данные выходы между собой независимы и по ним передаются либо логический «0», либо логическая «1». Схема УСР РАССТ работает следующим образом: если коды дальности, попавшие в схему сравнения, равны, то схема сравнения формирует следующие сигналы на управляющих выходах (по порядку выход №1, выход №2 и выход №3): (0; 0; 0), для прохождения кодов дальности через схему УСР РАССТ, которая вычисляет среднее значение кода дальности по формуле:  . Данная операция выполняется алгоритмическим путем. Схема ОПБ работает следующим образом: так как ККО формирует то 1, то 0 исходя из признака цели, то имеется возможность подстановки бита (1 или 0) в старший разряд кода дальности для облегчения последующей выборки из ПЗУ хранения данных кодов дальности целей, находящихся за пределами и в пределах рабочей зоны радиолокатора. Данная операция выполняется алгоритмически путем работы над отдельным битом. Блок 6.1 (ЦИФР КОММ 1) имеет два управляющих входа (вход 1 и вход 2), один информационный вход (вход 5) и два выхода. Блок 6.1 управляется сигналами «Признак обнаружения НЦ» (вход 2) и «Признак обнаружения ЗШЦ» (вход 1). Если управляющие сигналы имеют код (0; 1) («Признак обнаружения НЦ» - «0», а «Признак обнаружения ЗШЦ» - «1»), то входные коды дальности переключаются на вход блока 6.2 (СУММ). Если управляющие сигналы имеют код (1; 0) («Признак обнаружения НЦ» - «1», а «Признак обнаружения ЗШЦ» - «0»), то входные коды дальности переключаются на вход блока 6.4 (ОПБ). Данная операция выполняется алгоритмическим путем. Блок 6.5 (ЦИФР КОММ 2) и блок 6.7 (ЦИФР КОММ 3) имеют один информационный вход, один управляющий вход и два выхода. Блоки 6.5 и 6.7 управляются сигналами с блока 6.8 (СС). Принцип работы блока 6.5 (ЦИФР КОММ 2) следующий: если на управляющий вход данного блока поступает логическая «1» от блока 6.8 (СС), то выход данного блока переключается на вход блока 6.6 (ЛЗ на ΔТ); если на управляющий вход данного блока поступает логический «0» от блока 6.8 (СС), то выход данного блока переключается на вход блока 6.9 (УСР РАССТ). Данная операция выполняется алгоритмическим путем. Принцип работы блока 6.7 (ЦИФР КОММ 3): если на управляющий вход данного блока поступает логическая «1» от блока 6.8 (СС), то выход данного блока переключается на вход блока 6.8 (СС); если на управляющий вход данного блока поступает логический «0» от блока 6.8 (СС), то выход данного блока переключается на вход блока 6.9 (УСР РАССТ). Данная операция выполняется алгоритмическим путем. Блок 6.3 (ЦИФР КОММ 4) имеет два информационных входа, один управляющий вход и один выход. Блок 6.3 управляется сигналами с блока 6.8 (СС). Принцип работы блока 6.3 (ЦИФР КОММ 4): если на управляющий вход данного блока поступает логическая «1» от блока 6.8 (СС), то вход данного блока переключается к выходу блока 6.2 (СУММ); если на управляющий вход данного блока поступает логический «0» от блока 6.8 (СС), то вход данного блока переключается к выходу блока 6.9 (УСР РАССТ). Данная операция выполняется алгоритмическим путем.
. Данная операция выполняется алгоритмическим путем. Схема ОПБ работает следующим образом: так как ККО формирует то 1, то 0 исходя из признака цели, то имеется возможность подстановки бита (1 или 0) в старший разряд кода дальности для облегчения последующей выборки из ПЗУ хранения данных кодов дальности целей, находящихся за пределами и в пределах рабочей зоны радиолокатора. Данная операция выполняется алгоритмически путем работы над отдельным битом. Блок 6.1 (ЦИФР КОММ 1) имеет два управляющих входа (вход 1 и вход 2), один информационный вход (вход 5) и два выхода. Блок 6.1 управляется сигналами «Признак обнаружения НЦ» (вход 2) и «Признак обнаружения ЗШЦ» (вход 1). Если управляющие сигналы имеют код (0; 1) («Признак обнаружения НЦ» - «0», а «Признак обнаружения ЗШЦ» - «1»), то входные коды дальности переключаются на вход блока 6.2 (СУММ). Если управляющие сигналы имеют код (1; 0) («Признак обнаружения НЦ» - «1», а «Признак обнаружения ЗШЦ» - «0»), то входные коды дальности переключаются на вход блока 6.4 (ОПБ). Данная операция выполняется алгоритмическим путем. Блок 6.5 (ЦИФР КОММ 2) и блок 6.7 (ЦИФР КОММ 3) имеют один информационный вход, один управляющий вход и два выхода. Блоки 6.5 и 6.7 управляются сигналами с блока 6.8 (СС). Принцип работы блока 6.5 (ЦИФР КОММ 2) следующий: если на управляющий вход данного блока поступает логическая «1» от блока 6.8 (СС), то выход данного блока переключается на вход блока 6.6 (ЛЗ на ΔТ); если на управляющий вход данного блока поступает логический «0» от блока 6.8 (СС), то выход данного блока переключается на вход блока 6.9 (УСР РАССТ). Данная операция выполняется алгоритмическим путем. Принцип работы блока 6.7 (ЦИФР КОММ 3): если на управляющий вход данного блока поступает логическая «1» от блока 6.8 (СС), то выход данного блока переключается на вход блока 6.8 (СС); если на управляющий вход данного блока поступает логический «0» от блока 6.8 (СС), то выход данного блока переключается на вход блока 6.9 (УСР РАССТ). Данная операция выполняется алгоритмическим путем. Блок 6.3 (ЦИФР КОММ 4) имеет два информационных входа, один управляющий вход и один выход. Блок 6.3 управляется сигналами с блока 6.8 (СС). Принцип работы блока 6.3 (ЦИФР КОММ 4): если на управляющий вход данного блока поступает логическая «1» от блока 6.8 (СС), то вход данного блока переключается к выходу блока 6.2 (СУММ); если на управляющий вход данного блока поступает логический «0» от блока 6.8 (СС), то вход данного блока переключается к выходу блока 6.9 (УСР РАССТ). Данная операция выполняется алгоритмическим путем.
Предлагаемое устройство работает следующим образом.
На вход устройства (объединенные входы блоков 1 (ОКО) и 2 (ККО)) поступает пачка импульсов. В блоке 1 (ОКО) сигналы накапливаются, сравниваются с порогом и выносится решение об обнаружении сигнала или его отсутствии. В блоке 2 (ККО) пачка импульсов сравнивается с эталонными образ-векторами и классифицируется по признаку «Нормальная цель» и «Зашкальная цель». Далее информация обрабатывается в блоке логических схем, который состоит из ЛС И 1 (блок 3), ЛС И 2 (блок 4) и ЛС ИНВ (блок 5). Полученные признаки обнаружения блока 1 (ОКО) объединяются с результатом критерийной обработки блока 2 (ККО) в блоке 3 (ЛС И 1). На выходе блока 3 (ЛС И 1) признаки обнаружения о ЗШЦ подавляются. Сигнал «Признак обнаружения НЦ» формируется после блока 3 (ЛС И 1) и содержит информацию только о появлении НЦ. Сигнал с выхода блока 1 (ОКО) и выхода блока 2 (ККО) после объединения каналов в блоке 3 (ЛС И 1) поступает на схему запрета, состоящую из блоков 5 (ЛС ИНВ) и 4 (ЛС И 2), на выходе которой (выход блока 4 ЛС и 2) формируется сигнал «Признак обнаружения ЗШЦ». Далее для однозначного определения дальности до цели, находящейся за пределами рабочей зоны радиолокатора, и упрощения обработки в ПЗУ хранения данных информация с выхода блока логических схем поступает на вход блока 6 (АЛУ): с выхода блока 4 (ЛС И 2) - на вход №1 АЛУ («Признак обнаружения ЗШЦ»), с выхода блока 3 (ЛС И 1) - на вход №2 АЛУ («Признак обнаружения НЦ») и с битового выхода блока 2 (ККО) - на вход №3 АЛУ (сигнал распознавания целей). Сигналы «Признак обнаружения НЦ» и «Признак обнаружения ЗШЦ» управляют блоком 6.1 (ЦИФР КОММ 1) следующим образом:
А) если на входы №1 и №2 блока 6 (АЛУ) поступают сигналы: вход №1 - логическая «1», вход №2 - логический «0», то на входе устройства имеется код дальности зашкальной цели; блок 6.1 (ЦИФР КОММ 1) коммутирует входные коды дальности на блок 6.2 (СУММ) для устранения неоднозначных измерений дальности от ЗШЦ, используя поправки, хранящиеся в блоке 7 (ПЗУ ПОПР). После устраняется двойная отметка от цели, находящейся за пределами рабочей зоны радиолокатора. Блоки 6.5 (ЦИФР КОММ 2), 6.7 (ЦИФР КОММ 3) и 6.3 (ЦИФР КОММ 4) управляются блоком 6.8 (СС) следующим образом: изначально блок 6.8 (СС) переключает поток данных с выхода блока 6.2 (СУММ) на вход блока 6.8 (СС) и на вход блока 6.5 (ЦИФР КОММ 2), в свою очередь, на вход блока 6.6 (ЛЗ на AT), через блок 6.7 (ЦИФР КОММ 3) на вход блока 6.8 (СС), подав на управляющие входы блоков 6.5 (ЦИФР КОММ 2) и 6.7 (ЦИФР КОММ 3) логическую «1», а на управляющий вход блока 6.3 (ЦИФР КОММ 4) логический «0». Текущий код дальности проходит через блоки 6.5 (ЦИФР КОММ 2), 6.6 (ЛЗ на ΔТ) и 6.7 (ЦИФР КОММ 3) на вход блока 6.8 (СС) и оказывается задержан на ΔТ. После прихода текущего кода дальности блок 6.8 (СС) запоминает данный код, задержанный на ΔТ, и перенаправляет поток данных следующим образом: с выхода блока 6.2 (СУММ) данные поступают на вход блока 6.8 (СС), и через блок 6.5 (ЦИФР КОММ 2) на вход блока 6.9 (УСР РАССТ), подав на управляющие входы блоков 6.5 (ЦИФР КОММ 2) логическую «1», 6.7 (ЦИФР КОММ 3) и 6.3 (ЦИФР КОММ 4) логический «0». Здесь возможно две ситуации:
А.1) если текущий и предыдущий коды дальности совпадают, то блок 6.8 (СС), подав на блоки 6.5 (ЦИФР КОММ 2), 6.3 (ЦИФР КОММ 4) и 6.7 (ЦИФР КОММ 3) логический «0», перенаправляет поток данных через блок 6.9 (УСР РАССТ) для вычисления среднего значения двух кодов дальности в блок 6.4 (ОПБ) и с выхода блока 6.4 (ОПБ) полученный новый код дальности записывается в один формуляр цели;
А.2) если текущий и предыдущий коды дальности не совпадают, то блок 6.8 (СС), подав на блоки 6.5 (ЦИФР КОММ 2) и 6.7 (ЦИФР КОММ 3) логическую «1», а на блок 6.3 (ЦИФР КОММ 4) логический «0», перенаправляет поток данных на вход блока 6.4 (ОПБ), с выхода блока 6.4 (ОПБ) коды дальностей записываются в разные формуляры цели;
Б) если на входы №1 и №2 блока 6 (АЛУ) поступают сигналы: вход №1 - логический «0», вход №2 - логическая «1», то на входе устройства имеется код дальности нормальной цели; блок 6.1 (ЦИФР КОММ 1) коммутирует входные коды дальности на блок 6.4 (ОПБ) для последующей обработки кода дальности НЦ в блоке 6.4 (ОПБ).
На вход блока 6.4 (ОПБ) для обеспечения различия НЦ и ЗШЦ с выхода блока 2 (ККО) поступает сигнал «Распознавание целей». Данный сигнал состоит из последовательности бит: логический «0» соответствует признаку цели, находящейся за пределами рабочей зоны радиолокатора, а логическая «1» - признаку цели, находящейся в пределах рабочей зоны радиолокатора. Биты данного сигнала подставляются в старший разряд кода дальности Ri.
Предлагаемое устройство позволяет производить не только классификацию целей, но и устранять неоднозначные измерения дальности до целей, находящихся за пределами рабочей зоны радиолокационной станции, что делает процесс обнаружения целей более достоверным, надежным, а зона действия радиолокатора расширяется.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ОТОБРАЖЕНИЯ ИНФОРМАЦИИ О ЦЕЛЯХ В ИМПУЛЬСНОЙ ОБЗОРНОЙ РЛС С ВОБУЛЯЦИЕЙ ПЕРИОДА СЛЕДОВАНИЯ ЗОНДИРУЮЩИХ СИГНАЛОВ | 2008 |
|
RU2386978C2 |
| СПОСОБ ПОСЛЕДЕТЕКТОРНОЙ ОБРАБОТКИ ВОБУЛИРОВАННОЙ ПАЧКИ РАДИОИМПУЛЬСОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2237259C2 |
| СПОСОБ АВТОНОМНОГО ФОРМИРОВАНИЯ ПОСАДОЧНОЙ ИНФОРМАЦИИ ДЛЯ ЛЕТАТЕЛЬНОГО АППАРАТА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2007 |
|
RU2348981C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВТОРЖЕНИЯ ДВИЖУЩЕГОСЯ ОБЪЕКТА В КОНТРОЛИРУЕМУЮ ЗОНУ | 1998 |
|
RU2133046C1 |
| Способ и станция резонансной радиолокации | 2016 |
|
RU2610832C1 |
| ИМИТАТОР СИГНАЛОВ ПАССИВНОГО РАДИОЛОКАТОРА | 1985 |
|
SU1841017A1 |
| ИМПУЛЬСНЫЙ КОГЕРЕНТНЫЙ РАДИОЛОКАТОР | 1981 |
|
SU1841008A1 |
| СПОСОБ ЭКОЛОГИЧЕСКОГО МОНИТОРИНГА | 2009 |
|
RU2413250C1 |
| ПАССИВНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 1989 |
|
SU1841037A1 |
| ИМИТАТОР ПАССИВНОГО РАДИОЛОКАТОРА | 1987 |
|
SU1841002A1 |
Использование: в импульсной радиолокации для обнаружения и классификации целей по признаку их принадлежности к целям, находящимся в зоне однозначного или в зоне неоднозначного измерения дальности радиолокационной станции, а также для обеспечения однозначных измерений дальности до целей, расположенных в зоне неоднозначного измерения. Заявленное устройство содержит основной канал обнаружения, канал критерийной обработки, две логические схемы «И», логическую схему «Инверсия», постоянное запоминающее устройство хранения поправок к измеренной дальности, арифметическое логическое устройство, постоянное запоминающее устройство хранения данных, причем две логические схемы «И» и логическая схема «Инверсия» объединены в блок логических схем. Достигаемым техническим результатом является не только обнаружение и классификация целей, но и устранение неоднозначных измерений дальности до целей, находящихся за пределами зоны однозначного измерения дальности радиолокационной станции, что делает процесс обнаружения целей более достоверным, надежным, а зона действия радиолокационной станции расширяется. 3 ил.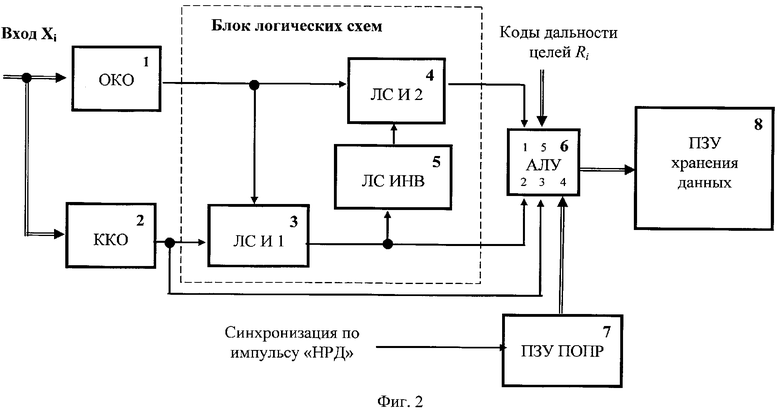
Устройство устранения неоднозначных измерений дальности до целей, находящихся за пределами рабочей зоны радиолокационной станции, содержащее основной канал обработки (ОКО), предназначенный для вынесения решения об обнаружении сигнала цели или о его отсутствии, канал критерийной обработки (ККО), предназначенный для классификации цели по признаку нахождения целей за пределами и в пределах рабочей зоны радиолокационной станции, и первую логическую схему «И», причем первым входом устройства являются объединенные входы ОКО и ККО, выходы которых соединены с первым и вторым входами схемы первой логической схемы «И» соответственно, отличающееся тем, что введены арифметико-логическое устройство (АЛУ), предназначенное для обеспечения установления различия признаков обнаруженных целей в соответствии с кодами дальности целей, находящихся за пределами и в пределах рабочей зоны радиолокационной станции, а также для устранения неоднозначного измерения дальности до целей, находящихся за пределами зоны однозначного измерения дальности радиолокационной станции, постоянное запоминающие устройство поправок (ПЗУ ПОПР), постоянное запоминающее устройство (ПЗУ) хранения данных, вторая логическая схема «И», логическая схема «Инверсия», вход которой соединен с выходом первой логической схемы «И», а выход - с вторым входом второй логической схемы «И», первый вход которой соединен с выходом ОКО, а выход - с первым входом АЛУ, являющимся входом признака обнаружения цели, находящейся за пределами рабочей зоны радиолокационной станции, выход первой логической схемы «И» соединен с вторым входом АЛУ, являющимся входом признака цели, находящейся в рабочей зоне радиолокационной станции, выход ККО соединен с третьим входом АЛУ, являющимся входом признака распознавания целей «1» - цель находится в рабочей зоне радиолокационной станции, «0» - цель находится за пределами рабочей зоны радиолокационной станции, при этом выход ПЗУ ПОПР соединен с четвертым входом АЛУ, вход ПЗУ ПОПР является входом синхронизации и вторым входом устройства, пятый вход АЛУ является входом «Кода дальности целей» и третьим входом устройства, выход АЛУ, являющийся выходом классификации обнаруженных целей в пределах и за пределами рабочей зоны радиолокационной станции, соединен с входом ПЗУ хранения данных.
| КОСТРОВА Т.Г | |||
| и др | |||
| Методы, алгоритмы и устройства снижения уровня помех, обусловленных неоднозначностью измерения дальности в импульсных РЛС | |||
| Методы и устройства передачи и обработки информации | |||
| Межвузовский сборник научных трудов | |||
| - С.-Пб.: Гидрометеоиздат, 2004, вып.6, с.101-109 | |||
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ | 2005 |
|
RU2296346C2 |
| 0 |
|
RU2237265C | |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО НЕСКОЛЬКИХ ЦЕЛЕЙ ИМПУЛЬСНО-ДОПЛЕРОВСКИМИ РАДИОЛОКАЦИОННЫМИ СТАНЦИЯМИ СО СРЕДНЕЙ ЧАСТОТОЙ ПОВТОРЕНИЯ ИМПУЛЬСОВ | 2002 |
|
RU2221258C1 |

