Изобретение относится к области радиолокационных систем, служащих для получения изображения, в частности к радиолокаторам с синтезированной апертурой. Космический радиолокатор предназначен для использования на космическом аппарате, преимущественно для ледовой разведки и позволяет наблюдать морскую поверхность в условиях полярной ночи и плотной облачности, находить участки открытой воды и льдов невысокой прочности, а также обеспечивать оперативное доведение полученных данных до экипажей судов.
Известен космический радиолокатор с синтезированной апертурой, формирующий изображение в реальном времени, содержащий блок управления режимами наблюдения, антенную систему, блок управления режимами наблюдения направленности последней, радиоприемное и радиопередающее устройства [1].
Недостатками данного космического радиолокатора являются невозможность управления лучом антенны в вертикальной плоскости, неудовлетворительные характеристики по пространственному разрешению радиолокационного изображения, так как пространственное разрешение определяется физическим размером антенны, размещаемой на космическом аппарате.
Известен также космический радиолокатор с синтезированной апертурой, формирующий изображение в реальном времени, содержащий блок управления режимами наблюдения, фазированную антенную систему, блок управления диаграммой направленности антенной системы, радиопередающее и радиоприемное устройства, синхронизатор и средства преобразования [2].
Недостатком этого космического радиолокатора является невозможность передачи информации, готовой к использованию потребителем, так как формирование радиолокационного изображения должно производиться наземным центром обработки спутниковой информации и передаваться потребителю через некоторое время, необходимое для его подготовки и установления связи с потребителем. Этим накладываются ограничения на многих пользователей, находящихся на удаленных береговых пунктах, малых кораблях и т.д.
Технической задачей изобретения является расширение арсенала радиолокационных комплексов, размещаемых на спутниках, и создание космического радиолокатора, обеспечивающего детальную съемку земной поверхности с заданными характеристиками качества и доставку готового радиолокационного изображения, полученного в широкозахватном режиме, непосредственно любому потребителю в реальном масштабе времени, не предъявляя высоких требований к технике приемной аппаратуры, а также имеющего повышенные адаптационные возможности и живучесть.
Технический результат, обеспечивающий решение поставленной задачи, состоит в том, что средства преобразования обеспечивают максимально возможное использование цифровых методов формирования и обработки сигналов, возможность изменения программы работы космического радиолокатора в процессе отработки и эксплуатации на орбите, возможность управления лучом антенной системы в вертикальной плоскости, возможность расширения сектора углов падения луча, а также возможность сопряжения радиолокационной информации с информацией других источников, например, оптического или инфракрасного, размещенных на космическом аппарате.
Сущность изобретения заключается в том, что в космическом радиолокаторе с синтезированной апертурой, формирующем изображение в реальном времени, содержащем блок управления режимами наблюдения, фазированную антенную систему, блок управления диаграммой направленности антенной системы, радиопередающее и радиоприемное устройства, синхронизатор и средства преобразования, последние выполнены в виде устройства цифровой обработки и устройства сопряжения, причем устройство цифровой обработки выполнено с возможностью формирования панорамного радиолокационного изображения и уточнения параметров ориентации и включает блок центрального процессора, блок обмена и подключенные к шине адрес-данные, входной фильтр, процессор сжатия сигнала, процессор синтеза изображения и контроллер бортовой информационной радиолинии, устройство сопряжения выполнено с возможностью формирования радиоимпульсов, временных стробов, а также квадратурных составляющих принимаемого сигнала и их оцифровки и включает блок обмена с оперативным запоминающим устройством, смесители, цифроаналоговые и аналого-цифровые преобразователи, блок управления режимами наблюдения выполнен с возможностью обмена с другими бортовыми комплексами и включает блок центрального процессора, контроллер внутренней шины и подключенные к шине адрес-данные, контроллер бортового коммутационного аппарата, контроллер системы временных частот, контроллер системы ориентации и стабилизации, контроллер системы навигации, упомянутый синхронизатор и контроллер двунаправленного кодового обмена, радиоприемное устройство выполнено с возможностью усиления и преобразования по частоте принимаемого сигнала и включает последовательно соединенные малошумящий усилитель, аттенюатор и преобразователь частоты, радиопередающее устройство выполнено с возможностью переноса на несущую частоту и усиления излучаемого радиоимпульса и включает усилитель мощности, возбудитель, модулятор и блок обмена, при этом контроллер кодового обмена блока управления режимами наблюдения связан со всеми упомянутыми блоками обмена и с блоком управления диаграммой направленности антенной системы, выполненным в виде устройства управления сканированием, а синхронизатор - с цифроаналоговыми и аналого-цифровыми преобразователями и блоком обмена устройства сопряжения, последний соединен с цифроаналоговыми преобразователями, а также с возбудителем и модулятором радиопередающего устройства и с выходами аналого-цифровых преобразователей, входы которых связаны через смесители с преобразователем частоты радиоприемного устройства, малошумящий усилитель которого подключен для получения принимаемого сигнала к антенной системе, выполненной с возможностью изменения ширины и углового положения луча за счет набора комбинаций состояния фазовращателей и соединенной для получения радиоимпульса на излучение с входящим в состав радиопередающего устройства усилителем мощности, к которому подключены модулятор и возбудитель, связанный через смесители с цифроаналоговыми преобразователями устройства сопряжения.
При этом антенная система может быть выполнена с двенадцатисекционным волноводно-щелевым полотном и тридцатью девятью фазовращателями для формирования требуемого распределения поля в угломестной плоскости, контроллер бортовой системы временных частот содержит четыре программируемых таймера, два регистра данных и регистр управления, а контроллер бортового коммутационного аппарата - два регистра команд, блок управления диаграммой направленности антенной системы выполнен с возможностью формирования кода управления фазовращателями последней и содержит оперативное запоминающее устройство, одиннадцатиразрядный счетчик адреса, десять шестнадцатиразрядных регистров, стошестидесятиразрядный регистр и регистр приема команды "Пуск", синхронизатор содержит оперативное запоминающее устройство, регистр управления, два регистра адреса, два шестнадцатиразрядных счетчика адреса и два восьмиразрядных счетчика числа повторений, а входной фильтр выполнен в виде двухканального полосового фильтра, включающего цепочку регистров сжатия, преобразователи кодов и четыре слоя сумматоров, процессор сжатия сигнала выполнен четырехканальным, а процессор синтеза изображения - одноканальным.
Кроме того, каждый канал процессора сжатия сигнала содержит генератор адресов буферов с оперативным запоминающим устройством начальных адресов, входные буферы, преобразователи кодов, сумматоры и запоминающее устройство опорной функции, а процессор синтеза изображения содержит оперативное запоминающее устройство адресов чтения, оперативное запоминающее устройство приращения фазы, входное и выходное буферные оперативные запоминающие устройства, корректоры амплитуды и фазы, кодер квадранта, преобразователи кодов, сумматоры и запоминающее устройство логарифмов амплитудных множителей.
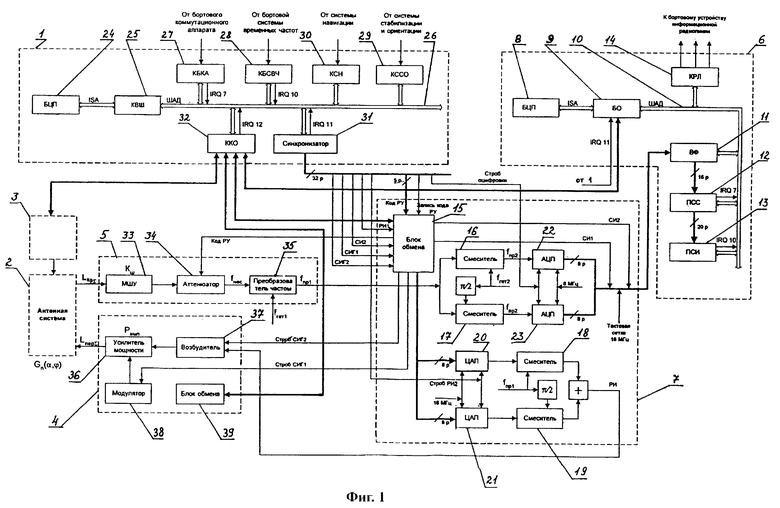
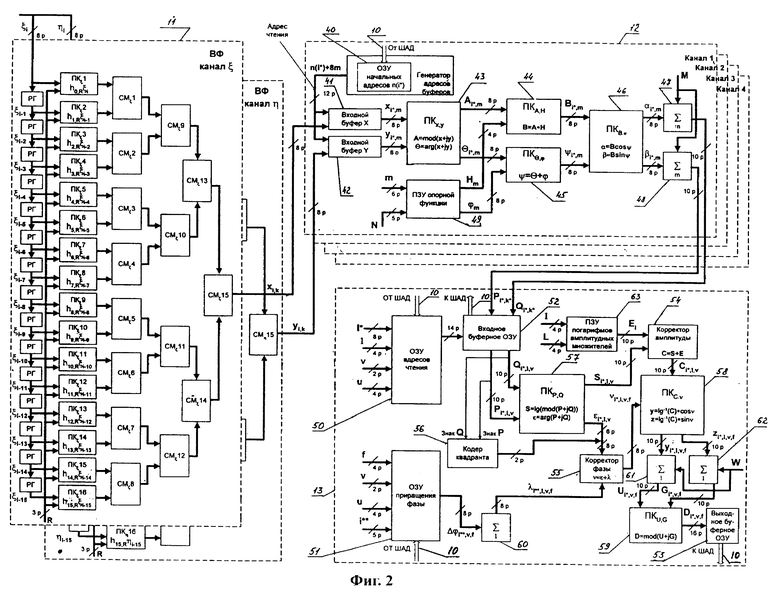
На фиг. 1 изображена функциональная схема космического радиолокатора с синтезированной апертурой, формирующего изображение в реальном времени для основных режимов наблюдения, на фиг. 2 - схема входного фильтра, процессора сжатия сигнала и процессора синтеза изображения.
Космический радиолокатор с синтезированной апертурой, формирующий изображение в реальном времени (КРЛС) содержит блок 1 управления режимами наблюдения, фазированную антенную систему 2, блок 3 управления диаграммой направленности антенной системы, радиопередающее и радиоприемное устройства 4, 5, соответственно, устройство 6 цифровой обработки и устройство 7 сопряжения, причем устройство 6 цифровой обработки включает блок 8 центрального процессора (БЦП), блок 9 обмена (БО) и подключенные к шине 10 адрес-данные (ШАД), входной фильтр (ВФ) 11, процессор 12 сжатия сигнала (ПСС), процессор 13 синтеза изображения (ПСИ) и контроллер 14 бортовой информационной радиолинии (КРЛ), устройство 7 сопряжения включает блок 15 обмена (БО), имеющий оперативное запоминающее устройство (ОЗУ), смесители 16, 17, 18, 19, цифроаналоговые преобразователи (ЦАП) 20, 21 и аналого-цифровые преобразователи (АЦП) 22, 23, регистр управления и состояния (РУС), оперативное запоминающее устройство (ОЗУ) кодов радиоимпульсов (РИ) и счетчик адресов ОЗУ (СЧОЗУ). Блок 1 управления режимами наблюдения включает блок 24 центрального процессора (БЦП), контроллер 25 внутренней шины (КВШ) и подключенные к шине 26 адрес-данные (ШАД) контроллер 27 бортового коммутационного аппарата (КБКА), контроллер 28 бортовой системы временных частот (КБСВЧ), контроллер 29 системы ориентации и стабилизации (КССО), контроллер 30 системы навигации (КСН), синхронизатор 31 и контроллер 32 двунаправленного кодового обмена (ККО), радиоприемное устройство 5 включает последовательно соединенные малошумящий усилитель 33, аттенюатор 34 и преобразователь 35 частоты, радиопередающее устройство 4 включает усилитель 36 мощности, возбудитель 37, модулятор 38 и блок 39 обмена (БО), при этом контроллер 32 кодового обмена связан с блоками 9, 15, 39 обмена и с блоком 3 управления диаграммой направленности антенной системы, выполненным в виде устройства управления сканированием, а синхронизатор 31 - с цифроаналоговыми и аналого-цифровыми преобразователями 20-23 и с блоком 15 обмена, последний соединен с цифроаналоговыми преобразователями 20, 21, а также с возбудителем 37, модулятором 38 и с выходами аналого-цифровых преобразователей 22, 23, входы которых связаны через смесители 16, 17 с преобразователем 35 частоты радиоприемного устройства. Малошумящий усилитель 33 подключен для получения принимаемого сигнала к антенной системе 2, соединенной с усилителем 36 мощности, к которому подключены модулятор 38 и возбудитель 37, связанный через смесители 18,19 с цифроаналоговыми преобразователями 20, 21 (фиг. 1).
Антенная система 2 выполнена с двенадцатисекционным волноводно-щелевым полотном, имеющим в раскрытом состоянии размер 12 м (азимутальный размер - 12 секций по 1 м) на 1 м (угломестный размер), и снабжена запитывающим устройством (ЗУА) с тридцатью девятью фазовращателями, а также элементами волноводного тракта (не изображено).
Контроллер 28 бортовой системы временных частот содержит четыре программируемых таймера, два регистра данных и регистр управления, а контроллер 27 бортового коммутационного аппарата - два регистра команд (не изображено).
Блок 3 управления диаграммой направленности антенной системы 2 содержит оперативное запоминающее устройство (ОЗУ), одиннадцатиразрядный счетчик адреса, десять шестнадцатиразрядных регистров, стошестидесятиразрядный регистр и регистр приема команды "Пуск" (не изображено).
Синхронизатор 31 содержит оперативное запоминающее устройство (ОЗУ), состоящее из двух частей, регистр управления (РУ), два регистра адреса, два шестнадцатиразрядных счетчика адреса и два восьмиразрядных счетчика числа повторений (не изображено).
Входной фильтр 11 выполнен в виде двухканального полосового фильтра, включающего цепочку регистров сжатия, преобразователи кодов и четыре слоя сумматоров (не обозначены), процессор 12 сжатия выполнен четырехканальным, а процессор 13 синтеза изображения - одноканальным.
Каждый канал процессора 12 сжатия содержит генератор адресов буферов с оперативным запоминающим устройством (ОЗУ) 40 начальных адресов, входные буферы 41, 42, преобразователи 43, 44, 45, 46 кодов (ПК), сумматоры 47, 48 и запоминающее устройство 49 опорной функции (ПЗУ), а процессор 13 синтеза изображения содержит оперативное запоминающее устройство (ОЗУ) 50 адресов чтения, оперативное запоминающее устройство (ОЗУ) 51 приращения фазы, входное и выходное буферные оперативные запоминающие устройства (ОЗУ) 52, 53 соответственно, корректор 54 амплитуды и корректор 55 фазы, кодер 56 квадранта, преобразователи 57, 58, 59 кодов (ПК), сумматоры 60, 61, 62 и запоминающее устройство (ПЗУ) 63 логарифмов амплитудных множителей.
Космический радиолокатор с синтезированной апертурой, формирующий изображение в реальном времени работает следующим образом.
Блок 1 обеспечивает обмен с другими бортовыми комплексами и общее управление устройствами КРЛС, антенная система 2 формирует диаграмму направленности с управляемыми параметрами и возможностью сканирования в угломестной плоскости, блок 3 задает требуемое состояние фазовращателей антенной системы 2, обеспечивающих управление диаграммой направленности, устройство 4 обеспечивает перенос радиоимпульсов на несущую частоту и усиление их до требуемого уровня мощности для излучения, устройство 5 обеспечивает предварительное усиление принимаемого сигнала на несущей частоте и перенос спектра на первую промежуточную частоту, устройство 6 обеспечивает формирование панорамного радиолокационного изображения (ПРЛИ) в реальном масштабе времени и передачу его к бортовому устройству информационной радиолинии, устройство 7 формирует радиоимпульсы (РИ) с линейной частотной модуляцией на первой промежуточной частоте, а также обеспечивает формирование квадратурных составляющих и оцифровку принимаемого сигнала на второй промежуточной частоте.
Общее управление космическим радиолокатором осуществляет блок 1, который обеспечивает работу КРЛС в том или ином режиме, задаваемом от бортового коммутационного аппарата (БКА). Кроме команд от БКА в основных режимах наблюдения блок 1 через контроллеры 27-30 принимает информацию от таких систем космического аппарата (КА), как бортовая система временных частот (БСВЧ), система навигации (СН) и система ориентации и стабилизации (ССО). Установка требуемых значений регулируемых параметров устройств КРЛС осуществляется через контроллер 32 кодового обмена (ККО). Исключение составляет код регулировки усиления (РУ), который передается на управляемый аттенюатор 34 от синхронизатора 31 через блок 15 обмена. Кроме собственно кода РУ от синхронизатора 31 в блок 15 обмена поступает сигнал записи кода РУ. Помимо этого от синхронизатора 31 в устройства КРЛС через устройство 7 поступают временные стробы, задающие циклограмму работы цепей формирования зондирующих сигналов и оцифровки принимаемых сигналов при проведении сеансов зондирования.
Работа блока 1 осуществляется под управлением блока 24 центрального процессора по программам, хранящимся в памяти программ. Выбор рабочей программы осуществляется по команде от БКА. В БЦП 24 используется плата промышленного компьютера, например фирмы Octagon Systems типа 7004.
Для БЦП 24 все программно-доступные ресурсы условно делятся на внутренние и внешние. К внутренним относятся ресурсы контроллеров 27 -30, к внешним - ресурсы устройств КРЛС. Связь с внутренними абонентами осуществляется по ШАД 26, формирование которой производится контроллером 25 внутренней шины из шины ISA БЦП 24. Связь с внешними абонентами производится с помощью контроллера 32 кодового обмена, который обеспечивает двунаправленную передачу информации.
Контроллер 27 осуществляет прием импульсных релейных команд управления от БКА и трансляцию их в БЦП 24. Релейные команды от БКА поступают на регистры команд (РК1 и РК2), при поступлении любой из команд формируется запрос на прерывание для сигнализации о приеме новой команды. После этого БЦП 24 считывает и анализирует содержимое регистров команд и таким образом определяет поступившую команду.
Контроллер 28 осуществляет прием от бортовой системы временных частот 17-разрядного последовательного кода астрономического времени (номер секунды текущих суток) и преобразование его в параллельный код для передачи по запросу в БЦП 24. Программируемые таймеры обеспечивают отсчет времени с тактом 0,5 мс (тактовая частота 2 кГц поступает от БСВЧ). Максимальное время счета каждого таймера составляет 216•0,5 мс = 32с.
Преобразованный код астрономического времени записывается в регистры данных (РДО и РД1) контроллера 28, доступные по чтению для БПЦ 24. В регистр управления (РУ) заносятся признаки окончания работы каждого из таймеров и поступления сигналов 1 Гц от БСВЧ. По каждому из этих сигналов формируется сигнал запроса прерывания, который при разрешении прерывания поступает на БЦП 24. Разрешение или запрет прерывания устанавливается со стороны БЦП 24 отдельным разрядом доступного на запись и чтение регистра управления КБСВЧ 28.
Работа синхронизатора 31 основана на циклически повторяемой (по количеству импульсов в пачке) выдаче последовательности 32-разрядных кодовых слов из ОЗУ, входящего в состав синхронизатора 31, в параллельный канал. Линии этого канала распределены по абонентам, соответственно за этими абонентами закреплены определенные разряды кодовых слов. ОЗУ состоит из двух частей (ОЗУ1 и ОЗУ2), каждая объемом 32К 32-разрядных слов. Это исполнение позволяет в одно и то же время выдавать содержимое из одной части абонентам, т. е. формировать необходимые коды и стробы в очередном сеансе зондирования, и записывать во вторую часть из БЦП 24 по ШАД 26, необходимую последовательность кодовых слов для следующего сеанса зондирования. Кодовые слова выдаются с тактовой частотой 8 МГц, содержимое каждой части ОЗУ представляет собой временную расстановку стробов и кодов в пределах одного периода следования импульсов в пачке.
Регистр управления определяет режимы работы составных частей синхронизатора 31. Регистры адреса служат для начальной установки адреса обращения к соответствующей части ОЗУ, одновременно эта установка аппаратно заносится в счетчик адреса.
Так как счетчик адреса - 16-разрядный, количество выдаваемых кодовых слов N может находиться в пределах от 1 до 215.
Счетчик числа повторений загружается со стороны БЦП 24, содержимое этого счетчика определяет количество повторений выдачи содержимого ОЗУ после запуска. Количество разрядов счетчика - 8, т.е. максимальное количество каналов выдачи составляет 256.
Запуск синхронизатора 31 на выдачу кодовых слов осуществляется записью 1 во второй разряд регистра управления РГУ со стороны БЦП 24.
Выдача информации на ОЗУ1 (ОЗУ2) всегда производится до конечного адреса ОЗУ1 (ОЗУ2). Следовательно, начальный адрес, загружаемый в счетчик СчА1 (СчА2) при записи или выдаче информации представляет собой дополнительный код параметра N. То же относится и к счетчикам числа повторений.
При переполнении счетчика числа повторений формируется сигнал запроса прерывания, который при разрешении прерывания передается в БЦП 24. Разрешение или запрет прерывания устанавливается отдельным разрядом регистра управления РГУ.
На антенную систему 2 поступают команды управления фазовращателями, позволяющими формировать требуемое распределение поля в угломестной плоскости. За счет этого можно изменять форму сечения диаграммы направленности антенны (ДНА) в этой плоскости, а именно ширину и угловое положение луча.
Параметры диаграммы направленности Gn(α,ϕ) антенной системы 2 уточняются в несколько этапов в представленной ниже последовательности:
1) оценочный расчет параметров ДНА через распределение поля в главных плоскостях (в угломестной плоскости оно задается n-ой комбинацией состояний фазовращателей);
2) экспериментальное определение параметров ДНА для одной секции волноводно-щелевого полотна на измерительном стенде с последующим пересчетом в параметры ДНА антенной системы 2 в целом;
3) экспериментальное определение параметров ДНА антенной системы 2 в составе КА на первых (технологических) этапах эксплуатации КРЛС на орбите с использованием специального калибровочного оборудования.
Исходной информацией для алгоритмического и программного обеспечения является набор поэтапно уточняемых таблиц, представляющих главные сечения ДНА - азимутальное Gn(α) и угломестное Gn(ϕ). Таблицы содержат нормированные данные о форме и угловом положении в антенной системе 2 координат основного лепестка и ближайших боковых для конечного набора комбинаций состояния фазовращателей (nmax ≅ 10). Шаг таблиц обеспечивает достаточную точность определения промежуточных значений функций при использовании линейной интерполяции. Переход к двухмерной ДНА Gn(α,ϕ) допускается осуществлять перемножением одномерных для соответствующих значении углов α и β.
Блок 3 осуществляет управление фазовращателями ЗУА антенной системы 2. К программно-доступным ресурсам блока 3 относятся счетчик адреса ОЗУ, само ОЗУ и регистр приема команды ПУСК. Обращение к программно-доступным ресурсам осуществляется со стороны блока 1 по каналу контроллера 32 кодового обмена.
Счетчик адреса ОЗУ задает начальный адрес в ОЗУ массива из 10 последовательно расположенных слов, которые по команде ПУСК записываются в регистр РГ1 (последовательно в каждый из десяти регистров РГ1.0- РГ1.9), преобразуясь таким образом в 160-разрядный код управления фазовращателями. Команда ПУСК представляет собой запись произвольного кода в упомянутый регистр приема команды ПУСК. Запись десяти слов в регистр РГ1 осуществляется аппаратно с начального адреса по одной команде.
По той же команде предыдущее содержимое регистра РГ1 переписывается в регистр РГ2 и передается для установки позиций фазовращателей ЗУА. Этим минимизируется время переключения луча антенны из одного программного положения в другое, поскольку загрузка в РГ1 производится последовательно по 16-разрядным словам, а перепись в РГ2 - параллельно по всем 160-ти разрядам. Таким образом, учитывается, что установка луча антенны в выбранное положение идет с запаздыванием на одну команду ПУСК. Минимально допустимый интервал между двумя последовательно выдаваемыми командами ПУСК составляет 500 мкс, время же установления луча антенны - 10 мкс с момента подачи команды.
Одной из основных функций устройства 7 является обеспечение всех операций по сопряжению аналоговой и цифровой частей КРЛС. К таким операциям относятся:
- формирование радиоимпульсов (РИ) из последовательностей отсчетов, хранящихся в ОЗУ блока 15 обмена в виде массивов 16-разрядных слов,
- формирование квадратурных составляющих принимаемого сигнала с переносом спектра на вторую промежуточную частоту 12 МГц и их оцифровка с последующей передачей в устройство 6 цифровой обработки,
- формирование временных стробов из последовательности кодовых слов, поступивших из синхронизатора 31 и передача их абонентам.
В основных режимах наблюдения задействуются программно-доступные ресурсы устройства 7 - регистр управления и состояния (РУС), ОЗУ кодов РИ, счетчик адреса ОЗУ (СЧОЗУ).
Единичное значение нулевого разряда регистра РУС разрешает передачу оцифрованных отсчетов квадратурных составляющих принимаемого сигнала из устройства 7 в устройство 6, определяя таким образом рабочий режим устройства 7. ОЗУ предназначено для хранения отсчетов РИ. Объем ОЗУ составляет 32К 16-разрядных слов. Чтение и запись со стороны блока 1 из (в) ОЗУ осуществляется по каналу кодового обмена 16-разрядными словами с начального адреса, записанного в СЧОЗУ. После каждого записанного (считанного) слова адрес ОЗУ увеличивается на 1. Разряды с 0 по 7 относятся к первому каналу ЦАП 20, а с 8 по 15 - ко второму каналу ЦАП 21. Загружаемый код РИ без знака, старший разряд кода -7(15).
15-разрядный счетчик адреса ОЗУ управляет работой ОЗУ. Для установки номера формируемого РИ необходимо записать в счетчик адрес начала отсчетов данного РИ. Число выдаваемых отсчетов РИ определяется длительностью строба РИ2, поступающего из синхронизатора 31.
Радиопередающее устройство 4 осуществляет перенос спектра радиоимпульса (РИ) с первой промежуточной частоты 144 МГц на несущую частоту 8600 МГц с последующим усилением до значения импульсной мощности Р = 1000 Вт и передачей в антенную систему 2 на излучение. В процессе проведения основных режимов наблюдения устройство 4 не требует программного управления со стороны БЦП 24, управление осуществляется на аппаратном уровне стробами СИГ 1, СИГ2 синхронизатора 31 и сигналами РИ.
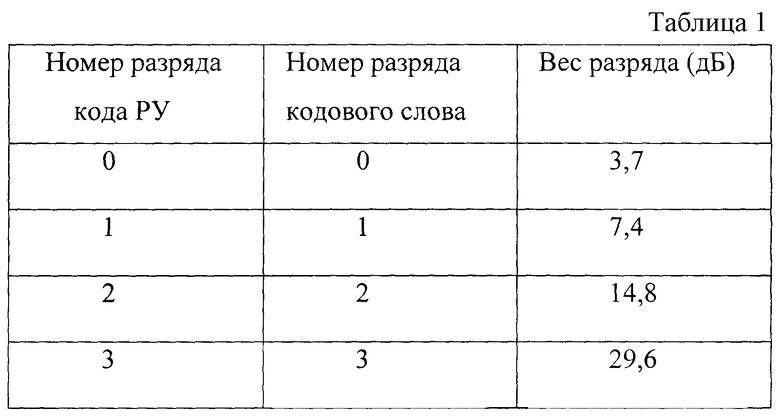
Радиоприемное устройство 5 осуществляет усиление принимаемого сигнала, поступающего от антенной системы 2 и преобразование его по частоте. Аттенюатор 34 управляется блоком 1. Код регулировки усиления поступает от синхронизатора 31 через блок 15 обмена. Соответствие разрядов кода регулировки усиления (РУ) разрядам кодового слова синхронизатора 31, а также веса разрядов приведены в таблице (см. в конце описания).
Устройство 6 в основных режимах наблюдения осуществляет цифровую обработку принимаемого сигнала, обеспечивая решение следующих задач:
- уточнение параметров ориентации по результатам проведения сеансов зондирования в специальных измерительных режимах;
- формирование панорамного радиолокационного изображения с заданными параметрами в реальном масштабе времени и передача его в бортовое устройство информационной радиолинии в сопровождении необходимой служебной информации;
- уточнение по мере необходимости параметров ориентации в процессе формирования ПРЛИ, не приводящее к появлению пропусков в ПРЛИ.
Блок 8 центрального процессора выполняет функции общего управления устройством 6 и, кроме того, участвует в обработке данных. Взаимодействие БЦП 8 с другими функциональными узлами устройства осуществляется по магистрали ШАД 10, являющейся аналогом магистрали ШАД 26. Формирование ШАД 10 осуществляется в блоке 9 обмена из шины ISA БЦП 8. Кроме того, в состав блока 9 обмена входит контроллер межмашинного обмена, обеспечивающий взаимодействие БЦП 8 и БЦП 24 по каналу кодового обмена.
Входной фильтр 11 обеспечивает ограничение частотной полосы сигнала, поступающего из устройства 7, что позволяет корректно произвести децимацию (прореживание) отсчетов сигнала и таким образом существенно снизить требования к производительности следующих далее блоков цифровой обработки (процессоров 12, 13).
Процессор 12 сжатия сигнала реализует в цифровой форме сжатие принимаемого сигнала по дальности путем свертки его (после предварительной децимации) с опорной функцией, согласованной с модулирующей функцией радиоимпульса (РИ).
Процессор 13 синтеза изображения обеспечивает в цифровой форме многоканальную доплеровскую фильтрацию последовательно по каналам дальности, формируя таким образом двумерное радиолокационное изображение (РЛИ) в координатах "задержка - доплеровский сдвиг частоты". Формирование РЛИ осуществляется последовательно группами по 4 первичных парциальных кадра (ПК), каждой группе первичных ПК соответствует фиксированное положение ДНА и зондирующий сигнал в виде пачки когерентных радиоимпульсов, при этом каждому первичному ПК в группе соответствует 1/4 часть пачки. Первичные парциальные кадры в группе представляют собой статистически независимые радиолокационные изображения одного и того же участка подстилающей поверхности. С выхода ПСИ 13 первичные ПК поступают в БЦП 8. Здесь производится суммирование (некогерентное накопление) соответствующих отсчетов первичных ПК, что позволяет уменьшить релеевские флюктуации отсчетов формируемого РЛИ. После этого осуществляется яркостная коррекция итогового парциального кадра. Результатом этой операции должно быть приведение к одному и тому же значению коэффициента пропорциональности между формируемым значением яркости элемента изображения и параметром σ0 (удельная эффективная площадь рассеяния) соответствующего элемента разрешения визируемой поверхности для всех элементов изображения во всех парциальных кадрах, составляющих ПРЛИ.
Далее БЦП 8 из последовательности парциальных кадров формирует два регулярных потока, представляющих собой специальным образом упорядоченные отсчеты изображения, сопровождаемые вставками служебной информации. Один поток состоит из собственно отсчетов формируемого ПРЛИ с размерами элемента разрешения 300 м • 300 м, второй - из отчетов укрупненного в 9 раз ПРЛИ (элемент разрешения 900 м • 900 м, применяется простое суммирование исходного ПРЛИ в пределах квадрата 3 • 3 элемента).
Сформированные потоки передаются в контроллер 14 радиолинии, который обеспечивает информационное и электрическое сопряжение с бортовым устройством информационной радиолинии.
ВФИ, ПСС12 и ПСИ13 представляют собой специализированные цифровые вычислительные устройства, работающие по фиксированным алгоритмам с возможностью предварительной настройки некоторых параметров со стороны БЦП 8. К их характерным особенностям относятся:
1) использование конвейерного способа организации вычислений;
2) широкое использование преобразователей кодов. Здесь и далее под преобразователями кодов подразумеваются элементы запоминающих устройств (ЗУ), содержащие специальным образом организованную информацию. Преобразование осуществляется за один рабочий такт чтения из ЗУ, при этом преобразуемый код подается на адресный вход, а результат представляет собой содержимое ячейки ЗУ, имеющей указанный адрес.
ВФ 11 представляет собой цифровой двухканальный полосовой фильтр 16-го порядка с конечной импульсной характеристикой. Каналы полностью идентичны, в каждом из каналов производится фильтрация одной из квадратурных составляющих принимаемого сигнала ξi,k и ηi,k, поступающих из устройства 7. Здесь и далее индекс i обозначает номер отсчета в пределах одного периода следования (или, что то же, номер соответствующего ему служебного импульса СИ 1), индекс k обозначает номер периода следования (или соответствующего импульса СИ2) (в схемах блоков ВФ и ПСС индексы k в обозначениях не используются, подразумеваясь неявно).
В каналах ВФ 11 производится обработка входных данных в соответствии с формулами:
где ht,R - значение импульсной характеристики фильтра с номером t для варианта его реализации с номером R. Значение R является параметром настройки фильтра 11 со стороны БЦП 8 и может принимать значение от 0 до 7, т.е. параметры фильтра можно программно установить в любое из 8 заранее подготовленных (на этапе изготовления устройства) положений.
Произведения, стоящие под знаком суммы, вычисляются одновременно для всех значений n в 16-ти преобразователях кодов (ПК), причем делается это с каждым тактом продвижения выходных данных через цепочку регистров задержки (РГ). Собственно суммирование осуществляется попарно в четырех слоях сумматоров (СМ), обеспечивающих конвейерный способ вычислений. На выходе последнего сумматора осуществляется усечение результатов до 8 старших разрядов. Вся схема входного фильтра 11 тактируется поступающими от блока 15 обмена импульсами СИ1, сопровождающими отсчеты входного сигнала, обработка производится "на проходе" по мере поступления входных данных. Выходные данные каналов ВФ 11 в сопровождении импульсов СИ1 записываются во входные буферы каналов ПСС 12. Следует учитывать, что такая организация вычислений приводит к появлению технологических задержек, т.е. первые несколько отсчетов выходных данных являются нерабочими.
Процессор 12 сжатия сигнала состоит из 4 одинаковых каналов, что дает возможность за счет распараллеливания обработки обеспечить ее реализацию в реальном времени. Поток данных от ВФ 11 можно условно представить в виде последовательности строк с номерами k. Первые k0 строк ПСС 12 пропускает, значение k0 соответствует времени распространения сигнала до визируемого участка и обратно, выраженному в периодах следования импульсов, рассчитывается в БЦП 8 и передается в ПСС 12 как параметр настройки на сеанс формирования очередного ПК. Далее строки поочередно записываются во входные буферы 41, 42 каналов ПСС 12, после записи строки в буфер 41 (42) сразу начинается обработка составляющих ее данных в соответствующем канале. Таким образом, на обработку строки каналу отводится время, составляющее три полных периода следования импульсов плюс еще один период за вычетом длительности строба оцифровки. Работа отдельного канала ПСС 12 осуществляется следующим образом.
К началу очередного цикла работы канала во входных буферах 41, 42 (X и Y соответственно) содержатся отсчеты квадратурных составляющих комплексной огибающей сигнала с выхода фильтра  Здесь i = 0... imax, k* = k- k0 = 0... kmax *. Значение imax определяется объемом буферных ОЗУ и составляет 4095, значение kmax * равно 63.
Здесь i = 0... imax, k* = k- k0 = 0... kmax *. Значение imax определяется объемом буферных ОЗУ и составляет 4095, значение kmax * равно 63.
Обработка данных в канале осуществляется в соответствии с формулой:
где  действительная и мнимая части комплексных отсчетов выходных данных, поступающих на дальнейшую обработку в ПСИ 13,
действительная и мнимая части комплексных отсчетов выходных данных, поступающих на дальнейшую обработку в ПСИ 13,
i* - номер дорожки дальности в формируемом ПК, i* = 0... imax *, значение imax * определяется соотношением между угломестным размером парциального кадра ΔLz и соответствующим размером элемента разрешения ΔLz. Для принятого на настоящий момент способа формирования ПРЛИ значение ΔLz составляет 50 км, значение Δlz-300 м. Соответственно получаем imax * = 166;
m - номер отсчета комплексной опорной функции, используемой при сжатии;
Hm - амплитуда отсчета опорной функции, представленной в показательной форме;
ϕm - фаза отсчета опорной функции.
Индексы i* и m являются параметрами циклов вычислений, они формируются аппаратно. Каждой комбинации индексов i* и m соответствует адрес i отсчетов во входных буферах 41, 42. Значение i формируется в генераторе адресов буферов по следующему правилу:
i = n(i*) + 8m,
где n(i*) - начальный адрес во входных буферах 41, 42 группы отсчетов сигнала, участвующих в процедуре свертки с опорной функцией при формировании i*-го отсчета выходных данных ПСС 12.
Именно при формировании адресов выборки данных из входных буферов 41, 42 осуществляется децимация (прореживание) отсчетов - для свертки берется каждый восьмой отсчет, начиная с некоторого начального. Возможность произвольного выбора начальных отсчетов позволяет "настраивать" ПСС 12 на восстановление полосок дальности с заранее назначенным регулярным расположением на подстилающей поверхности. При этом погрешность расстановки по задержке не будет превышать половины интервала квантования, т.е. 62,5 нс, что при пересчете в погрешность расстановки на местности даст величину не более 30 метров.
Массив n (i*) рассчитывается для каждого положения ДНА и загружается перед началом формирования очередного ПК (ПК без индекса - парциальный кадр) со стороны БЦП 8 в ОЗУ 40 начальных адресов, входящее в состав генератора адресов буферов.
Набор из N вариантов опорных функций хранится в ПЗУ опорной функции. Количество вариантов равно 32, конкретный вариант устанавливается со стороны БЦП 8 как параметр сеанса формирования очередного ПК.
В составе каждого канала ПСС 12 преобразователи 43 - 46 кодов совместно осуществляют вычисления в соответствии с выражением, стоящим в формуле (П1) под знаком суммы.
Преобразователь 43 кодов (ПКx,y) переводит комплексные отсчеты  в показательную форму
в показательную форму 


Преобразователи 44, 45 кодов (ПКA,H н ПКθ,ϕ осуществляют соответственно перемножение амплитуд и сложение фаз полученных отсчетов и отсчетов опорной функции:
Преобразователь 46 кодов (ПКB,ψ) переводит полученное комплексное число  обратно в алгебраическую форму
обратно в алгебраическую форму  в соответствии с соотношениями:
в соответствии с соотношениями:

Суммирование по индексу m осуществляется в накапливающих сумматорах 47, 48 отдельно для действительной и мнимой частей комплексных чисел 
До сумматоров 47, 48 разрядность представления данных нигде не превышала 8, что в достаточной степени соответствовало характеру производимых операций. На выходе же сумматоров 47, 48 разрядность результата резко повышается, в пределе на 6 разрядов при накоплении 64 отсчетов. Однако на выходе ПСС 12 формируются уже 10-разрядные числа. Выбор десяти значащих разрядов из потенциально возможных четырнадцати осуществляется таким образом, чтобы минимизировать неизбежно возникающие ошибки за счет округления и ограничения исходных 14-разрядных чисел. В ПСС 12 аппаратно реализуется следующий процесс формирования выходных данных:
1) 10-разрядное "окно", изначально установленное в правое крайнее положение (на младшие 10 разрядов соответствующего накапливающего сумматора), сдвигается на М разрядов влево. Здесь М - параметр, устанавливаемый со стороны БЦП 8 перед сеансом формирования очередного ПК,
2) оставшиеся справа разряды отбрасываются (усечение),
3) оставшиеся слева от "окна" разряды анализируются на предмет наличия хотя бы одного значащего разряда. Если такого разряда нет, то содержимое "окна" и будет искомым кодом, в противном случае производится ограничение этого кода заменой его на максимальное по модулю положительное или отрицательное число (в зависимости от знака).
Увеличение значения М приводит к росту ошибок округления, уменьшение - к росту ошибок ограничения. Значение М учитывается также в алгоритмах яркостной коррекции.
Выходные данные каналов ПСС 12 поступают во входное буферное ОЗУ 52 ПСИ 13. Запись осуществляется под управлением ПСИ 13 путем постоянного циклического опроса выходных регистров сумматоров 47, 48 каналов ПСС 12 и отслеживания соответствующих признаков обновления информации. Частота опроса заведомо выше частоты формирования обновленных данных, поэтому пропуски данных исключены.
Запуск ПСС 12 возможен двух типов. Первый, являющийся основным, осуществляется служебными импульсами СИ1 и СИ2 блока 15 обмена после установки настраиваемых параметров со стороны БЦП 8. Такой тип запуска характерен для режима формирования ПРЛИ. Запуск второго типа производится со стороны БЦП 8, он осуществляется после окончания работы ПСС 12 в сеансе формирования очередного ПК, при этом в обработку поступают последние содержащиеся во входных буферах 41, 42 каналов четыре строки, но с обновленным содержимым ОЗУ 40 начальных адресов. Такой тип запуска используется в дополнительных режимах уточнения параметров ориентации, конкретно - при уточнении угла места.
После окончания работы по первому или второму типу запуска со стороны ПСС 12 в БЦП 8 поступает сигнал запроса прерывания. ПСИ 13 осуществляет в цифровой форме многоканальную доплеровскую фильтрацию принимаемого сигнала последовательно в каналах дальности. ПСИ 13 представляет собой одноканальный специализированный процессор, осуществляющий конвейерную обработку данных в соответствии с формулой:
L-1
(П2)
l=0
где  формируемые отсчеты яркости частных парциальных кадров,
формируемые отсчеты яркости частных парциальных кадров,
i* - номер дорожки дальности в формируемом ПК (как и в ПСС 12),
f - номер канала условного доплеровского фильтра (максимальное количество каналов - 16),
v - номер частного парциального кадра, индекс v изменяется от 0 до 3,
l - номер отсчета в подпачке (или, что то же, 1/4 части пачки), соответствующей тому или иному частному ПК,
L - база синтеза, изменяется в пределах от 9 до 16,
E1 - амплитудная весовая функция, приращение фазы сигнала за период следования импульсов, соответствующее требуемой центральной частоте настройки доплеровского фильтра канала f для частного ПК с номером v в интервале дальностей i**;
приращение фазы сигнала за период следования импульсов, соответствующее требуемой центральной частоте настройки доплеровского фильтра канала f для частного ПК с номером v в интервале дальностей i**;
i** - номер интервала дальностей, i** = int(i*/8), в пределах каждого интервала дальностей параметры настройки канальных доплеровских фильтров фиксированы.
Все текущие значения индексов формируются в процессе вычислений аппаратно.
Выборка данных из входного буферного ОЗУ 52 в соответствии с текущими значениями индексов осуществляется с помощью ОЗУ 50 адресов чтения, преобразующего комбинации индексов в адрес чтения из входного буфера. ОЗУ 50 адресов чтения загружается однократно на весь сеанс формирования ПРЛИ.
Вычисления по формуле (П2) осуществляются на основе тех же принципов, что и вычисления в каналах ПСС 12. Комплексные отсчеты из входного буферного ОЗУ 52 поступают на преобразователь 57 кодов (ПКP,Q), осуществляющий перевод комплексных чисел из алгебраической формы в показательную, причем модуль представляется своим логарифмом (это сделано для возможности использования при амплитудном взвешивании операции суммирования вместо умножения, что облегчает аппаратную реализацию):

Для облегчения аппаратной реализации преобразователя 57 кодов (ПКP,Q) при сохранении итоговой разрядности представления аргумента (8 разрядов), использован кодер 56 квадранта, анализирующий знаки действительной и мнимой частей отсчетов входных данных. Это позволяет в ПКP,Q 57 формировать только младшие 6 разрядов аргумента, а старшие 2 разряда добавлять на выходе от кодера 56 квадранта.
Преобразованные данные (модуль и аргумент) параллельно поступают на корректоры 54, 55 (соответственно амплитуды и фазы). Корректор амплитуды обеспечивает амплитудное взвешивание отсчетов перед накоплением, причем отсчеты весовой функции E1 представленные своими логарифмами, поступают из ПЗУ 63 логарифмов амплитудных множителей. Корректор 54 амплитуды представляет собой сумматор, в котором осуществляется операция:
Корректор 55 фазы обеспечивает необходимый поворот вектора (входного отсчета) перед накоплением. Требуемый линейный по (индексу 1) набег фазовой добавки формируется как текущая сумма в накапливающем сумматоре 60, на входе которого фиксируется соответствующее значение  поступающее из ОЗУ 51 приращения фазы:
поступающее из ОЗУ 51 приращения фазы:
Корректор 55 фазы представляет собой сумматор по модулю 256, на входы которого поступают аргумент входных данных  и фазовая добавка
и фазовая добавка 

Полученный комплексный отсчет  поступает на преобразователь 58 кодов (ПКC,ν), где производится его перевод в алгебраическую форму:
поступает на преобразователь 58 кодов (ПКC,ν), где производится его перевод в алгебраическую форму:

Далее полученные отсчеты суммируются по индексу 1 в пределах базы синтеза в накапливающих сумматорах 61, 62 (отдельно для действительной и мнимой части). На входе сумматоров 61, 62 производится операция масштабирования отсчетов, аналогичная описанной выше для ПСС 12, сдвиг вправо производится на W разрядов вправо.
Накопленные составляющие  комплексных выходных отсчетов поступают на преобразователь 59 кодов (ПКU,G), в котором вычисляются их модули:
комплексных выходных отсчетов поступают на преобразователь 59 кодов (ПКU,G), в котором вычисляются их модули:
Эти значения являются выходными данными ПСИ 13, они записываются в выходной буфер ОЗУ 53 и затем передаются в БЦП 8 для дальнейшей обработки.
Запуск ПСИ 13 производится всегда по команде от БЦП 8.
По окончании обработки информации для очередного парциального кадра ПСИ 13 вырабатывает сигнал запроса прерывания в БЦП 8.
Обработка данных организована таким образом, что момент завершения формирования ПК задержан относительно начала излучения очередной пачки радиоимпульсов на величину порядка трех длительностей пачек. При этом операции обработки распределены по времени следующим образом:
1-я пачка - работает ВФ 11 и ПСС 12, заполняется входной буфер ОЗУ 52, 2-я пачка - работает ПСИ 13, заполняется выходной буфер ОЗУ 53, 3-я пачка - работает БЦП 8, производится некогерентное накопление, яркостная коррекция и формирование очередного кадра для передачи в контроллер 14 радиолинии.
Исходя из необходимости обеспечения конвейерности процесса буферы ОЗУ 52, 53 организованы по типу "качелей", пока одна часть заполняется, данные из другой части (от предыдущего сеанса) используются в обработке.
КРЛС предназначен для выполнения своих функций при следующих условиях:
1) параметры орбиты КА: орбита околокруговая, высота - 690 ± 15 км, эксцентриситет ≤ 0,05, наклонение 98o
2) углы визирования: от 25o до 45o (угол визирования - угол между местной вертикалью и направлением на ближнюю границу полосы захвата).
3) ошибка прогноза положения центра масс по высоте - 1,7 км.
4) ошибка ориентации по тангажу, рысканию и крену - 10 угл.мин.
5) ошибка стабилизации по тангажу, рысканию и крену - 0,005 град/мин.
Формированию ПРЛИ предшествуют режимы уточнения параметров ориентации, которые носят вспомогательный характер и являются обеспечивающими по отношению к режиму формирования ПРЛИ с заданными характеристиками качества. Режимы уточнения параметров ориентации включают в себя специальные измерительные режимы и дополнительные режимы, проводимые в процессе формирования ПРЛИ. Отличия этих режимов обусловлены различием интервалов неопределенности измеряемых параметров к моменту начала проведения режимов, для специальных измерительных режимов эти интервалы существенно больше.
Уточнение параметров ориентации производится через измерение задержки и доплеровского сдвига частоты сигнала, соответствующих положению максимума ДНА. При этом интервалы периодичности соответствующих сечений функции неопределенности зондирующего сигнала выбираются не меньше, чем интервалы неопределенности измеряемых параметров. Для специальных измерительных режимов это приводит к тому, что для измерения задержки и доплеровского сдвига частоты в направлении оси ДНА (соответственно, уточнения угла места и азимута), используются две специальные пачки импульсов, в первом случае с большим (порядка 1000...1500 мкс) периодом следования, во втором - с малым периодом (порядка 200. . . 300 мкс). Для дополнительных режимов уточнения параметров ориентации подходят те же сигналы, что и для режима формирования ПРЛИ.
Специальный измерительный режим уточнения угла места выполняется следующим образом. Излучается пачка из 4-х импульсов с большим периодом следования. При этом заполняются входные буферы 41, 42 всех 4-х каналов ПСС12. Запуск ПСС 12 может производиться несколько раз с тем же содержимым входных буферов 41, 42, но с разным содержимым ОЗУ 40 начальных адресов. Это позволяет сначала провести поиск основного лепестка ДНА в большой зоне неопределенности по массиву редко расположенных отсчетов, а затем произвести точное определение положения максимумов ДНА, обеспечив формирование в нужном интервале дальностей отсчетов с максимально частым расположением.
Из ПСИ 13 задействуется только входной буфер ОЗУ 52, данные из него поступают в БЦП 8, где и производится поиск положения максимума ДНА по задержке, при этом соответствующие отсчеты в 4-х строках могут быть некогерентно накоплены.
Для достижения необходимой точности измерений режим может повторяться несколько раз.
Специальный измерительный режим уточнения азимутального угла осуществляется следующим образом. Излучается пачка из 64 импульсов с малым периодом следования (64 - максимально возможное для записи во входной буфер ОЗУ 52 ПСИ 13 количество импульсов). В БЦП 8 данные подвергаются многоканальной (64 канала) доплеровской фильтрации в 4-х (например) дорожках дальности. Там же осуществляется поиск доплеровской частоты, соответствующей максимуму ДНА.
Дополнительный режим уточнения угла места осуществляется следующим образом. Дополнительные режимы уточнения параметров ориентации не требуют проведения отдельных сеансов активного зондирования. Для получения оценок измеряемых параметров используются те же отсчеты, что и для формирования того или иного парциального кадра. При этом уточнение угла места производится по тому же принципу, что и для специального измерительного режима, режим начинается после формирования ПК, используются отсчеты 4-х последних строк, содержащиеся к этому моменту во входных буферах 41, 42 каналов ПСС 12. Отличие от специального измерительного режима - возможность сразу производить поиск максимума ДНА по задержке без предварительного поиска с прореженными отсчетами в большой зоне неопределенности.
Дополнительный режим уточнения азимутального угла осуществляется следующим образом. Для обеспечения этого режима необходимо при подготовке устройства 6 к формированию первичных парциальных кадров в очередном сеансе задать максимальное количество (fmax = 16) каналов доплеровской фильтрации. Режим начинается после формирования ПК, используется информация выходного буферного ОЗУ 53 ПСИ13. В БЦП 8 производится только непосредственное определение доплеровской частоты, соответствующей максимуму ДНА.
Режим формирования ПРЛИ осуществляется следующим образом. Панорамное радиолокационное изображение состоит из 9-ти 50-километровых полос, каждая из которых формируется следом пятна ДНА в соответствующем программно выбираемом угломестном положении по мере пролета КА по траектории. Каждая полоса состоит из последовательно расположенных примыкающих друг к другу парциальных кадров.
Рассмотренные выше принципы построения и функционирования КРЛС позволяют формировать парциальные кадры таким образом, что они оказываются изначально "сшитыми" и в совокупности могут образовывать сетку элементов разрешения с программно назначаемой конфигурацией, в том числе и равномерную эквидистантную сетку. При этом оказывается возможным учесть такие факторы, как стабилизационные колебания КА и изменение по мере пролета составляющей радиальной скорости, обусловленной вращением Земли.
Возможность расстановки формируемых элементов изображения, составляющих тот или иной парциальный кадр, в узлах назначаемой координатной сетки обусловлена заложенной в КРЛС степенью гибкости параметров формирования и обработки сигналов. Основные из этих параметров следующие:
1) Массив начальных адресов чтения n(i*), загружаемый со стороны БЦП 8 в ОЗУ 40 начальных адресов, входящее в состав каждого канала ПСС 12. Этот параметр задает временную расстановку в пределах строба оцифровки отсчетов сигнала после осуществления процедуры сжатия. Объем ОЗУ 40 - 256 12-разрядных слов. При формировании парциального кадра ОЗУ 40 загружается один раз на сеанс, при проведении специального измерительного или дополнительного режима уточнения угла места ОЗУ 40 может загружаться два и более раз.
2) Массив значений  (приращение фазы сигнала за период следования импульсов), загружаемый со стороны БЦП 8 в ОЗУ 51 приращения фазы, входящее в состав ПСИ 13. Данный параметр позволяет назначать для каждой группы из 8 дорожек дальности (в пределах возможного массива из 256 дорожек) свою комбинацию частот настройки канальных доплеровских фильтров отдельно для каждого частного парциального кадра и для каждого из 9 программных положений ДНА. ОЗУ 51 состоит из двух одинаковых частей, работающих по принципу "качелей", объем каждой части составляет 32К 8-разрядных слов. Такая организация ОЗУ 51 позволяет заранее готовить новый массив
(приращение фазы сигнала за период следования импульсов), загружаемый со стороны БЦП 8 в ОЗУ 51 приращения фазы, входящее в состав ПСИ 13. Данный параметр позволяет назначать для каждой группы из 8 дорожек дальности (в пределах возможного массива из 256 дорожек) свою комбинацию частот настройки канальных доплеровских фильтров отдельно для каждого частного парциального кадра и для каждого из 9 программных положений ДНА. ОЗУ 51 состоит из двух одинаковых частей, работающих по принципу "качелей", объем каждой части составляет 32К 8-разрядных слов. Такая организация ОЗУ 51 позволяет заранее готовить новый массив  под прогнозируемые значения параметров таких факторов, как стабилизационные колебания КА и изменение по мере пролета составляющей радиальной скорости, обусловленной вращением Земли. Загрузка каждой части ОЗУ 51 производится на достаточно большую группу парциальных кадров, так как указанные факторы изменяются достаточно медленно.
под прогнозируемые значения параметров таких факторов, как стабилизационные колебания КА и изменение по мере пролета составляющей радиальной скорости, обусловленной вращением Земли. Загрузка каждой части ОЗУ 51 производится на достаточно большую группу парциальных кадров, так как указанные факторы изменяются достаточно медленно.
3) Время начала излучения очередной пачки. Стабилизационные колебания приводят к смещению пятен, высвечиваемых ДНА на подстилающей поверхности, относительно запланированных положений, что может привести к появлению яркостных "провалов" в формируемом ПРЛИ. Для компенсации этого эффекта в угломестной плоскости, при необходимости, можно использовать возможность сканирования, в азимутальной плоскости решением проблемы может быть компенсирующий сдвиг времени начала зондирования относительно программного (при отсутствии возмущений) момента. Данный параметр тесно связан с представленным выше массивом значений  изменение времени начала зондирования неизбежно приводит к необходимости пересчета элементов массива. Подобные сдвиги прогнозируются заранее, при этом производится расчет новых элементов массива и загрузка в ту часть ОЗУ 51, которая не находится в работе.
изменение времени начала зондирования неизбежно приводит к необходимости пересчета элементов массива. Подобные сдвиги прогнозируются заранее, при этом производится расчет новых элементов массива и загрузка в ту часть ОЗУ 51, которая не находится в работе.
Настройка по другим параметрам описана выше для каждой из составных частей КРЛС.
Выдача данных в бортовое устройство информационной радиолинии начинается не позднее, чем через 2 с после приема со стороны БКА команды на начало режима формирования ПРЛИ.
Точность расстановки элементов разрешения при формировании ПРЛИ в узлах назначаемой координатной сетки не хуже 50 м для произвольного элемента.
При проведении радиояркостной коррекции парциальных кадров суммарная погрешность в произвольном элементе изображения не более 0,5 дБ.
В любом режиме работы полученная информация может передаваться через радиолинию в реальном времени или с задержкой для записи и последующего воспроизведения.
Таким образом, предложенный КРЛС обеспечивает доставку готового радиолокационного изображения в широкозахватном режиме любому потребителю в реальном масштабе времени.
Использование этого КРЛС на космических аппаратах нового поколения обеспечит возможность безопасного круглогодичного судоходства по Северному морскому пути и другим сложным маршрутам.
Источники информации
1. Калмыков А.И., Ефимов В.Б., Кавелин С.С. и др. Радиолокационная система ИСЗ Космос-1500 // Исследование Земли из космоса, 1984, N 5, с. 84 - 93.
2. Raney R. K., Luscombe A.P., Langhat E.J., Ahmed S. RADARSAT// Proc. IEEE, 1991, v, 79, N 6, p. 839 - 849 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2009 |
|
RU2402807C1 |
| АВТОМАТИЗИРОВАННОЕ РАБОЧЕЕ МЕСТО ОПЕРАТОРА УПРАВЛЕНИЯ ВОЗДУШНЫМ ДВИЖЕНИЕМ | 2001 |
|
RU2219586C2 |
| БОРТОВАЯ АППАРАТУРА СИСТЕМ УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2002 |
|
RU2207613C1 |
| ПРОГРАММИРУЕМОЕ УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2009 |
|
RU2419139C1 |
| ФОТОГРАММЕТРИЧЕСКОЕ РАБОЧЕЕ МЕСТО | 2002 |
|
RU2225593C2 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА БЛИЖНЕГО ДЕЙСТВИЯ ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ С ПРЕПЯТСТВИЯМИ МАНЕВРИРУЮЩИХ НА АЭРОДРОМЕ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2001 |
|
RU2192653C1 |
| МОДЕЛИРУЮЩИЙ КОАП | 2013 |
|
RU2516703C1 |
| МНОГОПРОЦЕССОРНОЕ УСТРОЙСТВО ЦИФРОВОЙ ОБРАБОТКИ СИГНАЛОВ | 2008 |
|
RU2399089C2 |
| СИСТЕМА АСТРОНАВИГАЦИИ | 2013 |
|
RU2548927C1 |
| СИСТЕМА ОБРАБОТКИ ИЗОБРАЖЕНИЙ | 2011 |
|
RU2452125C1 |
Использование: на космическом аппарате для радиолокационной ледовой разведки. Сущность изобретения: в космическом радиолокаторе с синтезированной апертурой, формирующем изображение в реальном времени, содержащем блок управления режимами наблюдения, фазированную антенную систему, блок управления диаграммой направленности антенной системы, радиопередающее и радиоприемное устройства, устройство цифровой обработки и устройство сопряжения, устройство цифровой обработки включает блок центрального процессора, блок обмена и подключенные к шине адрес-данные входной фильтр, процессор сжатия сигнала, процессор синтеза изображения и контроллер бортовой информационной радиолинии, устройство сопряжения включает блок обмена с оперативным запоминающим устройством, смесители, цифроаналоговые и аналого-цифровые преобразователи, блок управления режимами наблюдения выполнен с возможностью обмена с другими бортовыми комплексами и включает блок центрального процессора, контроллер внутренней шины и подключенные к шине адрес-данные, контроллер бортового коммутационного аппарата, контроллер системы временных частот, контроллер системы ориентации и стабилизации, контроллер системы навигации, синхронизатор и контроллер двунаправленного кодового обмена. Достигаемым техническим результатом является возможность изменения программы работы космического радиолокатора в процессе отработки и эксплуатации на орбите, возможность сопряжения радиолокационной информации с информацией других источников. 6 з.п. ф-лы, 2 ил., 1 табл.
| RANEY R.K., LUSCOMBE A.P., LANGHAT E.L., AHMED S | |||
| "Radarsat" II Proc.I EEE | |||
| Циркуль-угломер | 1920 |
|
SU1991A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ОБЪЕКТОВ НА ПОВЕРХНОСТИ ЗЕМЛИ С ИСПОЛЬЗОВАНИЕМ РАДИОЛОКАТОРА С СИНТЕЗИРОВАННОЙ АПЕРТУРОЙ АЭРОКОСМИЧЕСКОГО БАЗИРОВАНИЯ | 1991 |
|
RU2017168C1 |
| Устройство для построения графиков колебаний, зафиксированных на киноленте | 1959 |
|
SU131907A1 |
| ЦАНГОВЫЙ ПАТРОН | 0 |
|
SU240449A1 |
| US 5029307, 02.07.1991 | |||
| US 5847673 A, 02.12.1998. | |||
