Изобретение относится к области радиолокации и, в частности, к способам радиолокационного обнаружения целей на фоне пассивных помех (ПП) естественного и искусственного происхождения, реализуемых в радиолокационных системах управления воздушным движением (УВД), а так же в импульсно-доплеровских информационно-измерительных системах контроля воздушного, наземного и надводного пространства.
Известны способы импульсно-доплеровского радиолокационного обнаружения целей на фоне ПП, широко применяемые в РЛС с совмещенной приемо-передающей антенной и квазинепрерывным излучением (КНИ) средней-высокой частоты повторения импульсов (ЧПИ) [1-6], в которых прием отраженных от лоцируемых объектов эхо-сигналов осуществляется в паузах работы передатчика. В РЛС КНИ, как правило, зондирующий сигнал (ЗС) представляет собой когерентную регулярную импульсную последовательность (РИП) с периодом следования импульсов, существенно меньшим временной задержки отраженного от цели эхо-сигнала. Использование таких сигналов обеспечивает высокое качество доплеровской селекции движущихся целей (СДЦ) на фоне помеховых переотражений различного происхождения в сочетании с возможностью высокоточной оценки дальности и скорости сопровождаемых целей.
Принципиальным недостатком известных способов обзорной им-пульсно-доплеровской радиолокации, реализованных в РЛС с регулярным КНИ малой скважности (менее 6…8 ед.), является наличие непросматри-ваемых за один цикл зондирования "слепых" эквидистантно расположенных участков дальности, а также неоднозначность первичного местоопределения дальности обнаруженных целей. Для устранения отмеченных недостатков, которые особо проявляются в РЛС с АФАР и (или) твердотельным передатчиком, приходится в каждом угловом направлении производить n-кратное (n>3…5) зондирование пространства пачечным КНИ с различными частотами -повторения импульсов [4 с.275-276] В результате, n-кратно снижается темп обзора пространства и, соответственно, не всегда допустимо возрастает расход время-энергетических ресурсов РЛС КНИ на решение обзорно-поисковых задач.
В [1…6] рассмотрена возможность преодоления отмеченных ограничений с использованием нерегулярных импульсных последовательностей (НИП) со свойством не более одного совпадения (с единичным уровнем боковых лепестков автокорреляционной функции). Однако при временных рассовмещениях эхо-сигналов относительно опорных такие НИП не обеспечивают требуемое для эффективной селекции движущихся целей (СДЦ) высокое качество спектральных (низкий уровень боковых лепестков (УБЛ)) сечений функции неопределенности. Аналогичная картина отмечается и в случаях использования фазо- и частотно-манипулированных сигналов [5, 6].
В качестве прототипа заявляемого объекта изобретения принят известный способ обзорной импульсно-доплеровской радиолокации [7], заключающийся в обзоре пространства путем формирования и направленного излучения в каждом угловом элементе разрешения поискового пространства когерентной импульсной последовательности зондирующих посылок с гиперболической вобуляцией периода повторения и длительности импульсов и их общим числом, удовлетворяющим условиям допустимости частотного разделения принимаемых эхо-сигналов на ЛЧМ-парциалы и достаточности частотно-скоростной избирательности РЛС для обнаружения целей на фоне ПП и однозначного скоростного местоопределения обнаруживаемых целей, соосного направленного приема в паузах зондирующих посылок РЛС эхо-сигналов целей и помеховых переотражений с последующей их время-частотной обработкой путем бланкирования принимаемых эхо-сигналов на время излучения зондирующих посылок, их частотного разделения на ЛЧМ-парциалы, частотной демодуляции ЛЧМ-парциалов, их противопомеховой весовой обработки и частотной режекции содержащихся в них помеховых эхо-сигналов, многоканальной спектрально-фильтровой обработки отрежектированных ЛЧМ-парциалов, выборочного суммирования сигналов спектрально-фильтровой обработки ЛЧМ-парциалов, согласованных по частотным и временным сдвигам эхо-сигналов с отдельно взятых элементов разрешения поискового пространства, и пороговой обработки сигналов выборочного суммирования.
Недостатком принятого в качестве прототипа способа импульсно-доплеровской радиолокации является не всегда достаточная дальность эффективного помехоподавления, ограничиваемая дальностью прямой радиовидимости элементов паразитного рассеяния гладко-сферической подстилающей земной (водной) поверхности в ближней зоне обнаружения РЛС. Указанное ограничение обусловлено тем, что с вводом режима вобуляции ЧПИ возникает деформация энергетической огибающей бланкированных пачечных эхо-сигналов, обуславливающая возрастание уровня боковых лепестков (УБЛ) спектра бланкированных помеховых эхо-сигналов и, как следствие, ухудшение качества допплеровской СДЦ. Степень проявления отмеченных деструктивных процессов нарастает по мере увеличения времени задержки ответных эхо-сигналов и становится недопустимой в условиях воздействия высокопротяженных распределенных по дальности ПП. К таким ПП относятся помехи, возникающие в условиях интенсивных метеообразований, сильной изрезанности рельефа местности, наличия в дальней зоне высотных техногенных сооружений и др. Проблематичность обеспечения эффективной СДЦ в импульсно-допплеровских РЛС с использованием реализованных в прототипе принципов непрерывного изменения ЧПИ отмечалась ранее в [1 с.301-305, 3 с.378].
Технической задачей предлагаемого способа является увеличение дальности эффективного подавления ПП РЛС КНИ с гиперболической вобуляцией зондирующих посылок, обеспечивающей возможность реализации эффективной СДЦ в условиях воздействия ПП различного происхождения.
Техническим результатом, обеспечивающим решение поставленной технической задачи, является снижение уровня помех бланкирования приемника РЛС, при котором удается в зоне поиска целевых эхо-сигналов минимизировать уровень боковых лепестков (УБЛ) спектра бланкированных помеховых эхо-сигналов до уровня, отмечаемого при использовании регулярных импульсных последовательностей, в результате чего обеспечивается эффективная СДЦ практически по всей дистанции зоны обзора РЛС.
Указанный технический результат и, как следствие, решение поставленной технической задачи достигается тем, что в известном способе обзорной импульсно-доплеровской радиолокации целей [7], заключающемся в обзоре пространства путем формирования и направленного излучения в каждом угловом элементе разрешения поискового пространства когерентной импульсной последовательности зондирующих посылок с гиперболической вобуляцией периода повторения и длительности импульсов и их общим числом, удовлетворяющим условиям допустимости частотного разделения принимаемых эхо-сигналов на ЛЧМ-парциалы и достаточности частотно-скоростной избирательности РЛС для обнаружения целей на фоне ПП и однозначного скоростного местоопределения обнаруживаемых целей, соосного направленного приема в паузах зондирующих посылок РЛС эхо-сигналов целей и помеховых переотражений с последующей их время-частотной обработкой путем бланкирования принимаемых эхо-сигналов на время излучения зондирующих посылок, их частотного разделения на ЛЧМ-парциалы, частотной демодуляции ЛЧМ-парциалов, частотной режекции содержащихся в них помеховых эхо-сигналов, однооконной весовой обработки и многоканальной спектрально-фильтровой обработки отрежектированных ЛЧМ-парциалов, выборочного суммирования сигналов спектрально-фильтровой обработки ЛЧМ-парциалов, согласованных по частотным и временным сдвигам эхо-сигналов с отдельно взятых элементов разрешения поискового пространства, и пороговой обработки сигналов выборочного суммирования, согласно данному изобретению, по завершению каждого цикла бланкирования принимаемых эхо-сигналов на время излучения очередной импульсной зондирующей посылки на межимпульсном интервале периода их следования бланкированные эхо-сигналы подвергают внутрипериодной весовой обработке по закону

t=[0 TS],
где t - текущее время процесса обработки принимаемых эхо-сигналов;
k - нумерация обрабатываемых комплексно-сопряженных пар линейно-частотно-модулированных парциалов принимаемых эхо-сигналов, нижняя и верхняя частотные полосы которых симметрично отстоят от их центральных несущих частот;
K=ENT(0.5ΔFпр/Fп)-1 - выбираемое из условия допустимых энергопотерь, обусловленных ограниченной частотной полосой приемника РЛС, общее число обрабатываемых комплексно-сопряженных пар линейно-частотно-модулированных парциалов принимаемых эхо-сигналов;
ENT - оператор округления до наименьшего целочисленного значения;
ΔFпр - эффективная частотная полоса приемника РЛС;
h - скважность зондирующих посылок;
Ts - длительность принимаемых эхо-сигналов, подвергаемых время-частотной обработке;
Ak(h) - табулированные весовые коэффициенты.полигармонического ряда;

ΔFп - девиация частоты повторения зондирующих посылок;
Fп - средняя частота повторения зондирующих посылок.
Введение указанных выше отличий обеспечивает сглаживание (скругление) линейно-ломаных деформаций огибающей бланкированных помеховых эхо-сигналов независимо от времени их задержки, благодаря чему минимизируется УБЛ спектров бланкированных помеховых эхо-сигналов и, как следствие, обеспечивается эффективное помехоподавление во всем диапазоне дальностей возможного размещения помехоформирующих образований.
Предлагаемое техническое нововведение позволяет достичь указанный выше технический результат, состоящий в увеличении дальности эффективного помехоподавления с обеспечением высокой эффективности СДЦ по всей дистанции зоны обзора РЛС.
Изобретение поясняется рисунками, представленными на фиг.1…6.
На фиг.1 приведены эпюры огибающих бланкированных эхо-сигналов при трех различных значениях времени их задержки (возрастающей от эпюры к эпюре слева направо) в отсутствии (Фиг.1.а) и при наличии косинусквадратного сглаживания линейно-ломаных деформаций бланкированного эхо-сигнала (Фиг.1.б).
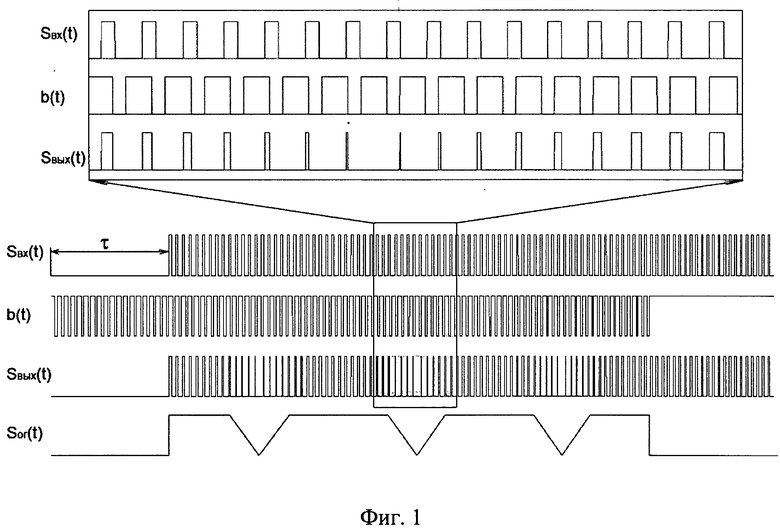
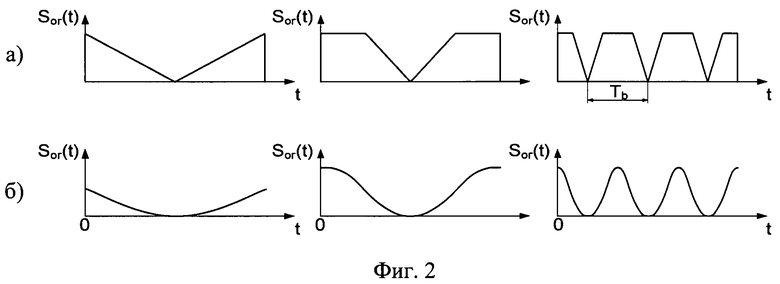
На фиг.2 приведены эпюры сигналов, поясняющих физику возникновения деструктивной деформации энергетической огибающей принимаемых эхо-сигналов в процессе их бланкирования в приемнике РЛС КНИ.
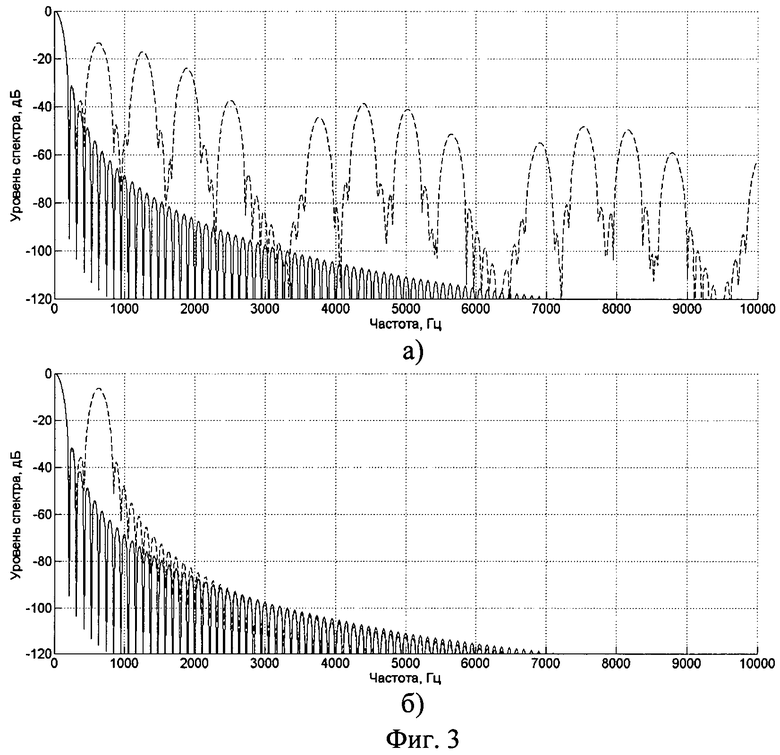
На фиг.3 приведены спектрограммы энергетических огибающих бланкированного эхо-сигнала в отсутствии (Фиг.3.а) и при наличии косинусквадратного сглаживания линейно-ломаных деформаций (Фиг.3.б).
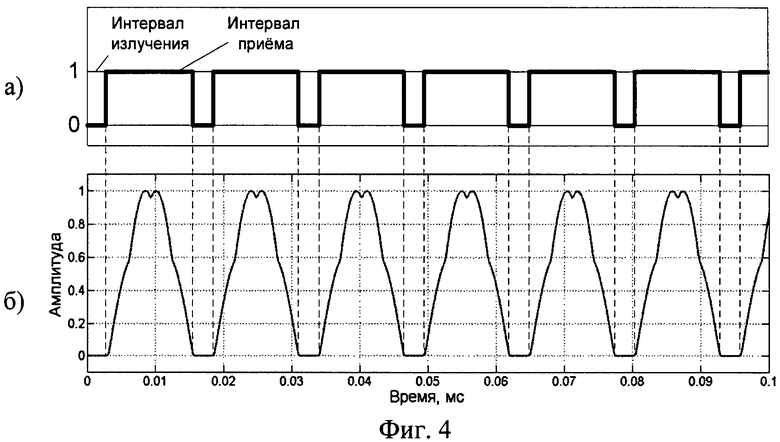
На фиг.4 представлена шестиоконная выборка функции внутрипе-риодной весовой обработки принимаемых локационных сигналов (ПЛС) при скважности зондирующих посылок h=5.
На фиг.5 приведено семейство графиков однооконной выборки дополнительно вводимой операции многооконной весовой обработки для типовых значений скважности зондирующих посылок РЛС КНИ с АФАР либо твердотельным передатчиком.
На фиг.6 приведена укрупненная блок-схема РЛС КНИ с гиперболической вобуляцией зондирующих посылок, в которой предусмотрена операция внутрипериодной оконной весовой обработки.
На фиг.2-6 приняты следующие числовые позиции, обозначения и сокращения.
На фиг.2 приведены эпюры ниже перечисленных сигналов:
Sвх(t, τ) - задержанный на время τ эхо-сигнал точечного элемента ПП или цели;
b(t) - сигнал бланкирования, соответствующий инвертированному сигналу запуска передатчика;
Sвых(t) - сигнал на входе приемного устройства, являющийся произведением входного сигнала и сигнала бланкирования;
Sог(t) - энергетическая огибающая бланкированного эхо-сигнала.
На фиг.6 приведена упрощенная версия построения передающей и приемо-обрабатывающей части РЛС с гиперболической вобуляцией зондирующих посылок, в которой предусмотрена операция внутрипериодной многооконной весовой обработки принимаемых локационных сигналов (ПЛС). На фиг.6 приняты следующие числовые позиции:
1 - антенна;
2 - циркулятор;
3 - схема бланкирования приемо-усилительного тракта приемника РЛС;
4 - управляемое весовое звено (УВЗ) для внутрипериодного взвешивания ПЛС;
5 - формирователь сигналов управления циклами внутрипериодной весовой обработки;
6 - приемо-усилительный тракт;
7 - аналого-цифровой преобразователь (АЦП);
8 - цифровой фазовый детектор (ЦФД);
9 - цифровой полосовой фильтр выделения ЛЧМ-парциалов;
10 - цифровой сигнальный процессор для раздельной спектрально-фильтровой обработки ЛЧМ парциалов;
11 - буферное запоминающее устройство (БЗУ);
12 - блок векторного суммирования сигналов спектрально-фильтровой обработки ЛЧМ-парциалов принятых эхо-сигналов;
13 - передатчик РЛС;
14 - формирователь импульсов запуска передатчика РЛС;
15 - вычислитель параметров зондирующих посылок (интервальной и широтно-импульсной вобуляции зондирующих посылок и общей продолжительности ЗС);
16 - блок измерения плотности дальностно-скоростного (время-частотного) распределения мощности помеховых переотражений;
17 - блок синхронизации и управления (БСУ);
18 - определитель выборочного извлечения из БЗУ (11) канальных сигналов спектрально-фильтровой обработки для их последующего суммирования в блоке 12;
19 - блок выборки канальных сигналов спектрально-фильтровой обработки.
Решаемая предлагаемым способом техническая задача обусловлена спецификой реализованных в прототипе операций формирования зондирующих посылок и стробирования приемника РЛС на время прохождения входного потока эхо-сигналов на последующие этапы их обработки.
Первая из указанных операций характеризуется применением гиперболической вобуляции периода повторения импульсов пачки Ti и их длительности τi по закону:

где i - нумерация импульсов пачки;



Fi=F0+αti - текущее значение частоты повторения импульсов (ЧПИ):
F0 - начальное значение ЧПИ; AF


τi=Ti/h - длительность i-го импульса пачки;
h=const - скважность импульсной последовательности;
N+1 - количество импульсов пачки;

ωн, φо - несущая частота и начальная фаза высокочастотного заполнения импульсов пачки.

Вторая из вышеуказанных операций характеризуется скачкообразным отпиранием и запиранием приемного устройства РЛС при его стробировании на время приема ответных эхо-сигналов по закону:

Принципиальным ограничением в использовании вышеупомянутых гиперболических НИП является то, что с ростом удаления помехоформирующих образований эффективность СДЦ снижается по причине нарастания деструктивной линейно-ломанной деформации энергетической огибающей помеховых эхо-сигналов, обусловленной бланкированием приемника на время работы передатчика РЛС. Указанная операция с использованием сигналов бланкирования традиционно прямоугольной формы (2) приводит к возникновению иллюстрированной фиг.1.а линейно-ломаной деформации энергетической огибающей принятых эхо-сигналов, которая существенно ухудшает их спектральное качество из-за возрастания УБЛ их спектрограмм.
Поясняемая фиг.2 физика процесса образования помех бланкирования состоит в том, что в отличие от случая использования регулярных импульсных последовательностей (РИП), для которых характерно непрерывное равномерное бланкирование импульсов пачечного эхо-сигнала с сохранением его исходной энергетической огибающей прямоугольной формы при любых временных сдвигах задержанных эхо-сигналов, в случае использования гиперболических НИП рассматриваемое бланкирование носит неравномерный осциллирующий характер.
Из приведенных на фиг.2 эпюр сигналов следует, что бланкирование приемника РЛС приводит к широтно-импульсной модуляции элементов импульсной последовательности бланкированного эхо-сигнала, и, как следствие, энергетическая огибающая бланкированного эхо-сигнала линейно деформирована.
Согласно фиг.1а энергетическая огибающая эхо-сигналов с большой задержкой имеет ярко выраженные изломы клиновидной формы, являющиеся причиной возникновения побочных спектральных гармоник, существенно снижающих спектральное качество бланкированных эхо-сигналов.
Для иллюстрации деструктивного влияния помех бланкирования на фиг.3 приведены результаты модельных числовых расчетов спектрограмм одиночного задержанного эхо-сигнала в отсутствии (фиг.3.а) и при наличии их бланкирования (фиг.3б). При расчетах указанных спектрограмм использовались следующие исходные данные: длительность пачки зондирующих посылок Ts=10 мс, средняя частота повторения зондирующих посылок F=68 кГц, скважность вобулированных зондирующих посылок h=5, относительная девиация частоты повторения зондирующих посылок (частоты повторения импульсов (ЧПИ)) β=0.077, задержка эхо-сигнала τ=1.5 мс, однооконное весовое распределение по пачке - косинус-квадратное (распределение Ханна).
В прототипе отмеченное деструктивное влияние помех бланкирования частично минимизировано применением оконной весовой обработки, характеризуемой двухпериодным косинусквадратным весовым распределением. Однако эта противопомеховая мера позволяет лишь незначительно расширить ближнюю зону эффективного помехоподавления и не обеспечивает решения поставленной технической задачи нейтрализации ПП во всей дистанции зоны обзора РЛС.
По результатам аналитических и модельных исследований установлено, что минимизировать влияние отмеченных изломов возможно, как показано на фиг.1.б, путем их сглаживания (скругления), при котором энергетическая огибающая бланкированного одиночного эхо-сигнала с задержкой τ принимает гармонический вид:

где α·τ - циклическая частота повторения клиновидных провальных участков огибающей бланкированных эхо-сигналов с временной задержкой τ.
Ts - длительность выделенного для последующей обработки сигнала.
Реализуемая при этом полимодальная весовая обработка в отличие от классических унимодальных методов весовой обработки всей пачки импульсов обладает свойством инвариантности к временным сдвигам изломов огибающей пачечных эхо-сигналов и временной динамики осцилляции этих изломов. Указанное свойство удается реализовать при переходе от скачкообразной (2) к монотонно-гладкой полигармонической зависимости (4) коэффициента передачи принимаемых локационных сигналов (ПЛС) на вход приемника РЛС:
t=[0 TS],
где t - текущее время процесса обработки принимаемых эхо-сигналов;
k - нумерация обрабатываемых комплексно-сопряженных пар ЛЧМ парциалов принимаемых эхо-сигналов, нижняя и верхняя частотные полосы которых симметрично отстоят от их центральных несущих частот;
K=ENT(0.5ΔFпр/Fп)-1 - выбираемое из условия допустимых энергопотерь, обусловленных ограниченной частотной полосой приемника РЛС, общее число обрабатываемых комплексно-сопряженных пар ЛЧМ парциалов принимаемых эхо-сигналов;
ENT - оператор округления до наименьшего целочисленного значения;
ΔFпр - эффективная частотная полоса приемника РЛС;
h - скважность зондирующих посылок;
Ts - длительность принимаемых эхо-сигналов, подвергаемых время-частотной обработке;
Ak(h) - табулированные весовые коэффициенты.полигармонического ряда;
ΔFп - девиация частоты повторения зондирующих посылок;
Fп - средняя частота повторения зондирующих посылок.
Табулированные значения весовых коэффициентов Ak(h) для различных скважностей зондирующих посылок, типовых для РЛС с АФАР и (или) твердотельным передатчиком, приведены в таблице 1.
На фиг.4 представлена шестиоконная выборка функции весовой обработки (4) ПЛС при скважности зондирующих посылок h=5.
На фиг.5 приведено семейство графиков однооконной выборки дополнительно вводимой операции многооконной весовой обработки (4) для типовых значений скважности зондирующих посылок РЛС КНИ с АФАР либо твердотельным передатчиком.
Нахождение (4) произведено методом обратного преобразования (3) ко входу стробируемого приемника РЛС. В отличие от классических однооконных унимодальных весовых распределений [1-6] полимодальная весовая функция (4) характеризуется следующими особенностями:
- весовое распределение (4) является многооконным полимодальным, окна которого совмещены с межимпульсными интервалами зондирующих посылок;
- весовое распределение (4), определяющее закон циклически повторяемой с частотой Fпi внутрипериодной вариации коэффициента передачи ПЛС на вход приемника, является суммой конечного ряда косинусоид кратных частот;
- число косинусоид полигармонического ряда (4) и их амплитудное распределение Ak, определяется скважностью зондирующих посылок h и количеством ЛЧМ парциалов (2К), выделяемых из ПЛС для последующей их обработки;
- все составляющие полигармонического многокосинусного ряда (4) по аналогии с ЗС с вобулированной ЧПИ также являются линейно-частотно-модулированными, что обеспечивает согласованную с динамикой формирования зондирующих посылок вобуляцию частоты повторения и длительности текущего весового окна.
С вводом многооконной весовой обработки (4) огибающая бланки-рованного единичного эхо-сигнала с временной задержкой τ характеризуется монотонно-гладкой косинусквадратной осцилляцией с частотой Fм=α·τ (см. фиг.1б), в силу чего спектр энергетической огибающей взвешенного (аподизированного) эхо-сигнала и, соответственно, его демодулированных ЛЧМ-парциалов, по аналогии со случаем тональной амплитудной модуляции, может быть представлен трехкомпонентной суммой, включающей идентичные по форме подспектры на нулевой (центральной) и двух симметрично отстоящих от последней верхней и нижней боковых частот модуляции огибающей. В результате, спектр каждого демодулированного ЛЧМ парциала эхо-сигнала при указанном многооконном весовом стробировании расщепляется на три частотные компоненты, подспектр каждой из которых идентичен исходному спектру небланкированного эхо-сигнала, с распределением их мощности, характеризуемыми шестидецибельным превышением центральной составляющей над боковыми.
Из (3, 4) следует принципиально важное свойство многооконной полимодальной весовой обработки - сохранять неизменным спектральное качество бланкированного и затем взвешенного квазинепрерывного сигнала гиперболического типа для всех его трех вышеупомянутых частотных компонент. С учетом малости частот модуляции огибающей бланкированного сигнала (Fм<fнц) для большинства практически значимых задач обзора пространства возрастание уровня боковых лепестков (УБЛ) спектрального распределения помеховых эхо-сигналов малых доплеровских частот в области поиска целевых эхо-сигналов невелико и может быть скомпенсировано (10…30) - процентным увеличением длительности применяемого КНИ:

где ΔTS - требуемое увеличение длительности ЗС;
fнц - нижняя граница зоны поиска целевого эхо-сигнала по частотно-скоростной координате;
ν(fнц) - скорость изменения УБЛ огибающей функции спектра КНС в области частот f=fн.ц.
Эффективность разработанного способа оценена на компьютерной имитационно-стохастической модели процесса функционирования РЛС КНИ гиперболического типа в среде Matlab. Корректность и высокая эффективность применения принципа многооконной весовой обработки ПЛС (4) подтверждаются представленными на фиг.3 результатами имитационного моделирования с показом Фурье-спектрограмм одиночного эхо-сигнала на выходе одного их парциальных приемных каналов обзорного приемника РЛС КНИ для следующих исходных данных: Fп=68 кГц, Ts=10 мс, 
Представленные на фиг.3а графики спектрограмм одиночного эхо-сигнала соответствуют двум вариантам применяемой оконной весовой обработки КНС:
- при использовании только однооконной косинус-квадратной весовой обработки всей пачки импульсов эхо-сигнала в отсутствии помех бланкирования - сплошная линия, что соответствует случаю применения регулярных импульсных последовательностей (РИП);
- при использовании только однооконной косинус-квадратной весовой обработки всей пачки импульсов эхо-сигнала при наличии помех бланкирования - штриховая линия;
Представленные на фиг.3б графики спектрограмм одиночного эхо-сигнала соответствуют различным вариантам применяемой весовой обработки КНС:
- при использовании только однооконной косинус-квадратной весовой обработки всей пачки импульсов эхо-сигнала в отсутствии помех бланкирования - сплошная линия, что соответствует случаю применения РИП;
- при наличии однооконной косинус-квадратной весовой обработки бланкированного эхо-сигнала и дополнительно вводимой многооконной весовой обработки ПЛС - штриховая линия.
Согласно фиг.3б применение предлагаемой многооконной весовой обработки (4) бланкированных эхо-сигналов позволяет в зоне поиска целевых эхо-сигналов (вне зоны режекции помеховых переотражений с малым допплеровским сдвигом) снизить УБЛ Фурье-спектрограмм помеховых эхо-сигналов до предельно возможного уровня, отмечаемого при использовании РИП.
Платой за отмеченный выигрыш в подавлении помеховых переотражений является допустимое возрастание энергопотерь (η) на многооконную весовую обработку ПЛС (см. Таблицу 2), а также ухудшение разрешения целей по скорости (по причине образования в окрестности главного максимума целевого эхо-сигнала двух ослабленных по мощности (на 6 дБ) боковых всплесков амплитудной модуляции), что также допустимо для рассматриваемого обзорного режима работы РЛС.
Отмеченные энергопотери компенсируются рассмотренным выше (10-30-процентным) увеличением длительности применяемого КНИ (5).
Все дополнительно включенные в процесс приема-обработки сигналов операции являются физически реализуемыми и не требуют выхода за рамки современной радиоэлектронной схемотехники.
На фиг.6 приведена упрощенная версия построения передающей и приемо-обрабатывающей части РЛС КНИ гиперболического типа, в которой использован рассмотренный принцип многооконной весовой обработки принимаемых локационных сигналов (ПЛС).
Принципы построения и функционирования РЛС КНИ по приводимой на фиг.6 схеме в полном объеме аналогичны прототипу [7] за исключением их корректировки по вводу операции многооконной весовой обработки.
В соответствии с рассмотренным способом минимизации маскирующего влияния помех бланкирования его упрощенная блок-схемная реализация в РЛС КНИ характеризуется следующей трехэтапной организацией процесса функционирования.
На этапе предзондовой подготовки (планирования) рабочего цикла зондирования поискового пространства в заданном угловом направлении производятся:
- расчет блоком 15 параметров зондирующего сигнала (Fп, α, TS) с использованием поступающих из блока 16 данных о дальностно-скоростном распределении («рельефе») ПП в контролируемом угловом элементе разрешения;
- рассчитанные данные блоком 15 поступают в формирователь ИЗП 14 и БСУ 17, где пересчитываются в оценки начальных установок блоков 9, 10.
На этапе активной работы РЛС КНИ с выходом в эфир осуществляется циклически повторяющаяся последовательность следующих операций:
- запуск передатчика 13 и направленное излучение антенной 1 зондирующих посылок в эфир;
- соосный прием антенной 1 ответных эхо-сигналов, которые через циркулятор 2 поступают на схему бланкирования 3;
- стробированная на межимпульсном интервале зондирующих посылок часть входного потока принятых эхо-сигналов УВЗ 4 подвергается дополнительно вводимой операции многооконной весовой обработки в соответствии с (4);
- после усиления блоком 6 взвешенные эхо-сигналы подвергаются аналого-цифровому преобразованию (АЦП) блоком 7 и цифровому фазовому детектированию (ЦФД) блоком 8;
- сформированные цифровые сигнальные выборки (ЦСВ) с выхода ЦФД 8 поступают на многоканальную линейку полосно-пропускающих фильтров (ППФ) 9 различной частотной настройки, с помощью которых осуществляется разделение ПЛС на ЛЧМ-парциалы;
- цифровая демодуляция и раздельная обработка демодулированных ЛЧМ парциалов линейкой ЦСП 10, в которых производятся режекция помеховых сигналов малых допплеровских частот, унимодальная однооконная весовая обработка всей пачки импульсных элементов ПЛС и многоканальный спектральный Фурье-анализ отрежектированных эхо-сигналов;
- запись результатов спектрально-фильтровой обработки ЛЧМ парциалов в БЗУ11.
По окончании цикла зондирования пространства реализуется завершающий этап обработки накопленных в БЗУ 11 сигналов спектрально-фильтрового анализа, в ходе которого для каждого дальностно-скоростного элемента разрешения с помощью блоков 18,19 производится выборочное извлечение из БЗУ 11 векторных оценок сигналов спектрально-фильтровой обработки ЛЧМ-парциалов ПЛС с последующим их суммированием блоком 12.
Более детальное развернутое рассмотрение принципов построения и функционирования РЛС КНИ гиперболического типа, за исключением вводимой операции многооконной весовой обработки эхо-сигналов, представлено в [7, 8].
В отличие от прототипа [7] в приведенном блок-схемном построении РЛС КНИ предусмотрено использование двух дополнительных элементов - УВЗ 4 и формирователя 5.
Возможное схемное решение УВЗ 4 представлено в [9] с описанием быстродействующих схем управляемой аттенюации сигналов на полевых транзисторах Шотки. Причем, циклически повторяемая формирователем 5 генерация сигналов управления УВЗ 4 может быть эффективно реализована с использованием цифро-аналогового преобразователя (ЦАП) и цифрового синтезатора сигналов (ЦСС), в оперативном запоминающем устройстве (ОЗУ) которого хранятся предварительно рассчитанные табулированные значения функции внутрипериодной многооконной весовой обработки (4).
Таким образом, предлагаемый способ обзорной импульсно-доплеровской радиолокации технически реализуем и обеспечивает недоступное для аналогов и прототипа эффективное помехоподавление интенсивных мешающих переотражений по всей дистанции зоны обзора с сохранением практически беспровальной по дальности зоны обнаружения РЛС целей и возможности однозначного измерения их дальности и скорости при однократном цикле зондирования пространства в единичном угловом элементе его разрешения, что соответствует цели данного изобретения.
Изобретение выполнено на уровне технического предложения и реализовано на ПЭВМ в виде математической имитационно - стохастической модели.
Результаты проведенных имитационных цифровых экспериментов подтверждают работоспособность и реализуемость эффективного подавления помех бланкирования РЛС КНИ с гиперболической вобуляцией зондирующих посылок при использовании предлагаемого способа приемообработки локационных эхо-сигналов.
Изобретение может быть применено в РЛС КНИ гиперболического типа при работе в условиях воздействия переотражений от высокопротяженных распределенных по дальности переотражений помехоформирующих образований - не только от земной поверхности и местных предметов в ближней зоне обнаружения целей, но и вне этой зоны, где могут располагаться метеообразования, естественные возвышения рельефа местности типа гор и холмов, высотные техногенные сооружения и др.
Источники информации
1. Вопросы статистической теории радиолокации / Под ред. Г.П.Тартаковского, Том 1. - М.: Сов. радио, 1963.
2. Теоретические основы радиолокации / Под ред. Я.Д.Ширмана. - М.: Сов. радио, 1970.
3. Справочник по радиолокации под ред. М.И.Сколника. Т.3. - М.: "Сов. Радио". 1979.
4. Трухачев А.А. Радиолокационные сигналы и их применение. - М.: Военное издательство, 2005.
5. Кук Ч. Бернфельд М. Радиолокационные сигналы: Пер. с англ. / Под ред. B.C.Кельзона. - М.: Сов. Радио, 1971.
6. Френке Л. Теория сигналов: Пер. с англ. / Под ред. В.Е.Вакмана. - М.: Сов радио, 1974.
7. Способ обзорной импульсно-доплеровской радиолокации целей на фоне отражений от земной поверхности: Боделан Б.Г., Логинов Е.Б., Хрупало Д.А., Дмитрович Д.Г. Кириченко А.А., Астрахов В.В., Колбаско И.В. Заявка №2009112039/09 (016375) от 02.04.2009. Решение о выдаче патента на изобретение от 18.10.2011.
8. Обзорный приемник РЛС с квазинепрерывным излучением гиперболического типа: Пат. №90572 Россия, Бендерский Г.П., Боделан Б.Г., Логинов Е.Б., Хрупало Д.А., Дмитрович Д.Г. Кириченко А.А., Астрахов В.В., Колбаско И.В. Заявка №2009111525 от 31.03.2009. Опубликовано 10.01.2010, Бюл. №1.
9. Д.Д.Ганзий, Г.И.Трошин. Адаптивные диаграмообразующие системы СВЧ. Антенны вып.8-9, 2002, с.89-120.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2449307C2 |
| СПОСОБ ПЕРВИЧНОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РЛС С МАЛОЙ СКВАЖНОСТЬЮ ЗОНДИРУЮЩИХ ПОСЫЛОК | 2020 |
|
RU2742461C1 |
| СПОСОБ ПЕРВИЧНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ ДАЛЬНОМЕТРИИ ЦЕЛЕЙ НА ФОНЕ УЗКОПОЛОСНЫХ ПАССИВНЫХ ПОМЕХ | 2016 |
|
RU2641727C1 |
| СПОСОБ ФОРМИРОВАНИЯ ФИКСИРОВАННОЙ СПЕКТРАЛЬНОЙ ЗОНЫ, СВОБОДНОЙ ОТ ПОМЕХ ОТ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ В БОРТОВЫХ ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАТОРАХ | 2023 |
|
RU2834733C1 |
| Способ обнаружения, измерения дальностей, скоростей и ускорений нескольких малоскоростных низковысотных целей в главном луче импульсно-доплеровских радиолокаторов | 2022 |
|
RU2801393C1 |
| Способ однозначной первичной дальнометрии группы целей на фоне узкополосных пассивных помех в режиме высокой частоты повторения импульсов зондирующего сигнала | 2020 |
|
RU2756034C1 |
| СПОСОБ ОДНОВРЕМЕННОГО ИЗМЕРЕНИЯ ДАЛЬНОСТИ, СКОРОСТИ И УСКОРЕНИЯ МАЛОСКОРОСТНОЙ МАНЕВРИРУЮЩЕЙ ВОЗДУШНОЙ ЦЕЛИ В ИМПУЛЬСНО-ДОПЛЕРОВСКИХ РАДИОЛОКАЦИОННЫХ СТАНЦИЯХ ПРИ ВЫСОКОЙ ЧАСТОТЕ ПОВТОРЕНИЯ ИМПУЛЬСОВ И ЛИНЕЙНОЙ ЧАСТОТНОЙ МОДУЛЯЦИИ | 2018 |
|
RU2692912C1 |
| СПОСОБ И УСТРОЙСТВО ОБЗОРА ПРОСТРАНСТВА В РЛС | 2014 |
|
RU2564130C1 |
| АНТЕННАЯ СИСТЕМА И СПОСОБ ЕЕ РАБОТЫ | 2019 |
|
RU2729889C1 |
| КОРАБЕЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2005 |
|
RU2293405C1 |

Изобретение применимо в радиолокационных станциях (РЛС) при обзоре приземной радионадгоризонтной области поискового пространства, характеризуемой воздействием на РЛС помеховых переотражений от высокопротяженных распределенных по дальности помехоформирующих образований различного типа. Достигаемый технический результат изобретения - увеличение дальности эффективного помехоподавления в условиях воздействия на РЛС пассивных помех различного происхождения практически независимо от места расположения помехоформирующих образований на дистанции зондирования РЛС за счет снижения уровня помех бланкирования приемника РЛС, при котором удается в зоне поиска целевых эхо-сигналов минимизировать уровень боковых лепестков (УБЛ) спектра бланкированных помеховых эхо-сигналов до уровня, отмечаемого при широко используемых регулярных импульсных последовательностях (РИЛ). Поставленная цель достигается тем, что по завершению каждого цикла бланкирования принимаемых эхо-сигналов на время излучения очередной импульсной зондирующей посылки на межимпульсном интервале периода их следования эхо-сигналы подвергают внутрипериодной многооконной весовой обработке, благодаря чему обеспечивается сглаживание (скругление) линейно-ломаных деформаций огибающей бланкированных помеховых эхо-сигналов независимо от времени их задержки. 6 ил., 2 табл.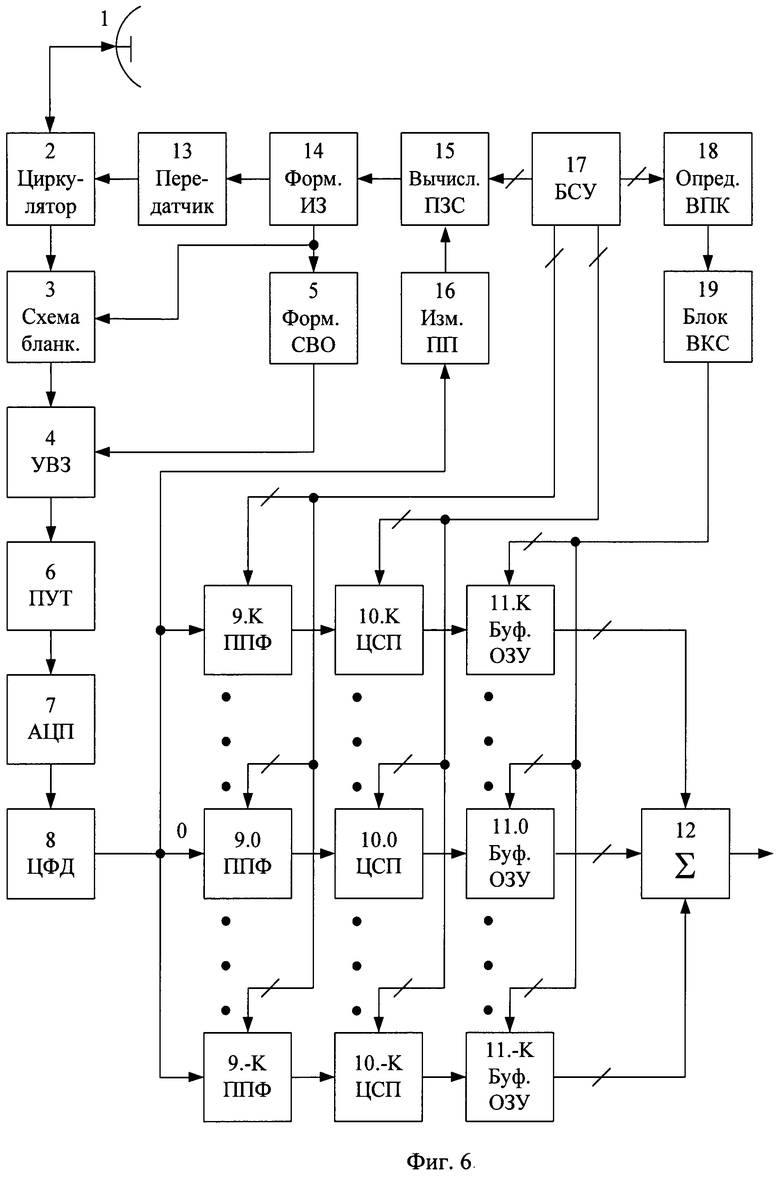
Способ обзорной импульсно-доплеровской радиолокации целей на фоне пассивных помех, заключающийся в обзоре пространства путем формирования и направленного излучения в каждом угловом элементе разрешения поискового пространства когерентной импульсной последовательности зондирующих посылок с гиперболической вобуляцией периода повторения и длительности импульсов и их общим числом, удовлетворяющим условиям допустимости частотного разделения принимаемых эхо-сигналов на линейно-частотно-модулированные парциалы и достаточности частотно-скоростной избирательности РЛС для обнаружения целей на фоне пассивных помех и однозначного скоростного местоопределения обнаруживаемых целей, соосного направленного приема в паузах зондирующих посылок РЛС эхо-сигналов целей и помеховых переотражений с последующей их время-частотной обработкой путем бланкирования принимаемых эхо-сигналов на время излучения зондирующих посылок, их частотного разделения на линейно-частотно-модулированные парциалы, частотной демодуляции линейно-частотно-модулированных парциалов, частотной режекции помеховых переотражений, противопомеховой весовой обработки, многоканальной спектрально-фильтровой обработки отрежектированных линейно-частотно-модулированных парциалов и выборочного суммирования сигналов спектрально-фильтровой обработки линейно-частотно-модулированных парциалов, согласованных по частотным и временным сдвигам эхо-сигналов с отдельно взятых элементов разрешения поискового пространства, и пороговой обработки сигналов выборочного суммирования, отличающийся тем, что по завершению каждого цикла бланкирования принимаемых эхо-сигналов на время излучения очередной импульсной зондирующей посылки на межимпульсном интервале периода их следования бланкированные эхо-сигналы подвергают внутрипериодной весовой обработке по закону

t=[0 TS],
где t - текущее время процесса обработки принимаемых эхо-сигналов;
k - нумерация обрабатываемых комплексно-сопряженных пар линейно-частотно-модулированных парциалов принимаемых эхо-сигналов, нижняя и верхняя частотные полосы которых симметрично отстоят от их центральных несущих частот;
K=ENT(0.5ΔFпр/Fп)-1 - выбираемое из условия допустимых энергопотерь, обусловленных ограниченной частотной полосой приемника РЛС, общее число обрабатываемых комплексно-сопряженных пар линейно-частотно-модулированных парциалов принимаемых эхо-сигналов;
ENT - оператор округления до наименьшего целочисленного значения;
ΔFпр - эффективная частотная полоса приемника РЛС;
h - скважность зондирующих посылок;
Ts - длительность принимаемых эхо-сигналов, подвергаемых время-частотной обработке;
Ak(h) - табулированные весовые коэффициенты полигармонического ряда;

ΔFп - девиация частоты повторения зондирующих посылок;
Fп - средняя частота повторения зондирующих посылок.
| СПОСОБ ОБЗОРНОЙ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИИ ЦЕЛЕЙ НА ФОНЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ | 2009 |
|
RU2449307C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО СОПРОВОЖДЕНИЯ ЦЕЛИ ПО СКОРОСТИ В ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2006 |
|
RU2314552C1 |
| РАДИОЛОКАЦИОННАЯ СИСТЕМА С ПРОГНОЗОМ ПРОПАДАНИЯ ЦЕЛЕЙ В ЗОНАХ ДОПЛЕРОВСКОЙ РЕЗЕКЦИИ | 2009 |
|
RU2408030C2 |
| КОРРЕЛЯЦИОННО-ФИЛЬТРОВОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 2003 |
|
RU2254594C1 |
| US 6753806 B1, 22.06.2004 | |||
| US 5977905 A, 02.11.1999 | |||
| DE 3128990 A, 10.02.1983 | |||
| Способ динамического испытания плотности плунжерной пары топливного насоса дизеля | 1982 |
|
SU1035267A1 |

