Изобретение относится к теории тяги рельсового транспортного средства и может быть использовано для оптимизации режима движения поезда с точки зрения энергозатрат на тягу при заданном времени прибытия на конечный пункт.
Способ выбора наиболее оптимального режима движения поезда основан на использовании закона о кинетической энергии:

где m - масса поезда;
νнач, νкон - скорость поезда соответственно в начале и конце рассматриваемого участка пути;
А - работа всех действующих на поезд сил;
AT - работа сил тяги локомотива;
Асопр - работа сил сопротивления движению поезда;
AУ - работа сил, возникающих на уклонах участка пути (при спуске - отрицательна);
Акр - работа сил сопротивления, возникающих при движении поезда в кривых участка пути;
Аторм - работа тормозящих сил (при рекуперации - отрицательна).
При рассмотрении движения поезда по всему участку пути между исходным и конечным пунктами νнач=νкон=0. Энергозатраты на преодоление поездом уклонов и кривых (AУ+Акр) зависят от географического расположения исходного и конечного пунктов, а также от профиля и плана пути и не могут быть оптимизированы. Таким образом, машинист может минимизировать только работу сил сопротивления движению поезда и тормозящих сил. Некоторое уменьшение последней при электрической тяге может быть достигнуто благодаря применению рекуперации. Работа сил сопротивления движению поезда может быть определена по формуле:
где ω(ν) - удельное сопротивление движению поезда, зависящее от его скорости;
l - длина участка пути между исходным и конечным пунктами;
ds - дифференциал пройденного пути.
Учитывая потери в локомотиве, рекомендуемую Правилами тяговых расчетов квадратичную зависимость удельного сопротивления движению поезда от скорости определяют:

где а, b, с - постоянные коэффициенты,
и используя известные в математике методы анализа функций случайной величины, можно получить целевую функцию оптимизации энергозатрат на тягу:
где M[ν] - μатематическое ожидание скорости движения, полученное по зависимости скорости от пути ν=f(s);
D[ν] - дисперсия скорости, полученная по зависимости скорости от пути ν=f(s);
ηср - средневзвешенный коэффициент полезного действия (КПД) локомотива на всем участке движения.
Таким образом, для оптимизации энергозатрат на тягу следует выбирать такой режим движения поезда, когда, во-первых, при заданном времени прибытия поезда в конечный пункт зависимость ν=f(s) дает минимальное значение дисперсии скорости движения, а во-вторых, реализуется максимальный средневзвешенный КПД локомотива на участке.
Известен способ нахождения оптимального режима ведения поезда, основанный на применении метода динамического программирования (Ткачев Ю.В., Бегагоин Э.И. Применение метода динамического программирования для нахождения оптимальных режимов ведения поезда. //Вестник инженеров электромехаников железнодорожного транспорта. Выпуск 1 /Самарская государственная академия путей сообщения: Самара, 2003. с.18-19).
Специфика метода динамического программирования состоит в том, что для отыскания оптимального управления планируемый процесс разделяется на ряд последовательных шагов или этапов. Соответственно и сам процесс становится многошаговым. На каждом шаге сначала находят условное оптимальное управление для любого из возможных исходов предшествующего шага, а затем, после того как процесс оптимизации доведен до конечного состояния, снова проходят всю последовательность шагов и на каждом шаге из множества условных оптимальных управлений выбирается одно.
Без выбора конкретных критериев поиска оптимального режима ведения поезда указанный выше метод становится очень громоздким, так как требует учета очень большого числа различных параметров движения, так или иначе влияющих на энергозатраты, связанные с перемещением поезда из начального в конечный пункт. Соответственно при его применении требуется использование мощной вычислительной техники и значительные временные затраты. По этой причине этот метод применяется в стационарных условиях, не учитывает действительные погодные условия выполнения поездки, трудно поддающиеся математическому моделированию.
Известна также “Оптимизация режима движения поезда с точки зрения экономии электроэнергии” (Verfahren zur Energieoptimierung der Fahrweise bei einem Fahrzeug. /Zug unter Verwendung eines gleitenden Optimierungshorizontes. Заявка 19935352 Германия, МПК {7} В 61 L 27/00 / Franke Rudiger, Terwiesch Peter, Meyer Markus, Ketteler Karl-Hermann; ABB Daimler-Benz Transportation (Technology) GmbH. -N 19935352.2; Заявл. 29.07.1999; Опубл. 01.02.2001).
Суть этого изобретения заключается в оптимизации режима движения поезда на основе использования скользящей оптимизирующей горизонтали и временных резервов, которые запланированы в графике движения поезда. Участок движения между исходным и конечным пунктами разбивается на отдельные участки, для каждого из которых установлен определенный запас времени. Для достижения оптимального с точки зрения энергии режима движения используется оптимизационный алгоритм и рассматривается только один из участков движения. Результаты оптимизации реализуются только для первого участка движения. Оптимизационные расчеты циклически повторяются при движении поезда, а рассматриваемый участок движения перемещается вместе с ним.
Однако в указанном методе в явном виде не учитывается такая важная характеристика движения поезда, как КПД локомотива, непосредственно влияющий на энергозатраты. При оптимизации режима движения поезда здесь также не принимается во внимание зависимость его удельного сопротивления движению от скорости. Между тем, как следует из выражения (2), коэффициент с этой зависимости, по физической сущности отражающий аэродинамическое сопротивление поезда и наиболее сильно зависящий от погодных условий выполнения поездки, наиболее сильно влияет на величину полезной работы, выполняемой локомотивом при перемещении поезда. Кроме того, вызывает сомнение сам принцип определения оптимального с точки зрения энергозатрат на тягу режима управления локомотивом. Понятие временных резервов, которые запланированы в графике движения поезда, здесь в принципе некорректно. Если у поезда есть временной резерв в прибытии на конечный пункт, значит он где-то ранее двигался с повышенной (по сравнению с минимально необходимой) скоростью. Это уже говорит о том, то выбранный график движения поезда ν=f(s) не оптимален. Если под указанным понятием подразумевается некоторый запас во времени прибытия на конечный пункт для случая, если бы поезд двигался при максимальных технических возможностях, то этот временной резерв должен быть равномерно распределен на весь участок так, чтобы отклонение от необходимой средней скорости (дисперсия скорости) было минимальным. Этого невозможно добиться, разбивая участок движения между исходным и конечным пунктами на отдельные участки, а затем оптимизируя управление локомотивом на каждом из них по мере движения поезда. Оптимизационные расчеты необходимо выполнять на весь оставшийся путь до конечного пункта, а корректировку режима движения поезда осуществлять в зависимости от оперативной обстановки на участке или возможного изменения условий выполнения поездки.
Целью предлагаемого изобретения является создание эффективного способа выбора наиболее экономичного режима движения поезда на заданном участке пути при заданном времени прибытия на конечный пункт, максимально учитывающий основные физические закономерности процесса движения транспортного средства и его сопротивление движению, соответствующее реальным погодным условиям выполнения поездки.
Сущность предлагаемого “Способа выбора наиболее экономичного режима движения поезда на заданном участке” заключается в следующем.
Для получения исходных параметров оптимизации энергозатрат на тягу во время первоначального разгона поезда на пределе значения коэффициента сцепления колес локомотива с рельсом, считающегося наименее энергоемким, при контроле параметров управления локомотивом (позиции контроллера машиниста, напряжения в контактной сети, тока в тяговых двигателях) на каждом из трех произвольным образом выбранных этапах разгона измеряется длина пройденного поездом пути l1, l2, l3 и его скорость в начале и конце этапа νнач1 и νкон1, νнач2 и νкон2, νнач3 и νкон3, по которым бортовая ЭВМ вычисляет зависимость удельного сопротивления движению поезда от скорости, решая систему трех уравнений:
где АT1, AT2, АT3 - работа сил тяги локомотива соответственно на первом, втором и третьем этапах разгона;
Ay1, Ay2, Ау3 - работа сил, возникающих на уклонах соответственно на первом, втором и третьем этапах разгона;
Aкр1, Акр2, Акр3 - работа сил сопротивления, возникающих при движении поезда в кривых соответственно на первом, втором и третьем этапах разгона;
m - масса поезда.
При этом скорость и пройденный поездом путь определяются при помощи датчика скорости на колесной паре локомотива и системы определения положения рельсового транспортного средства, например спутниковой. Работа сил тяги локомотива на каждом из трех этапов разгона рассчитывается бортовой ЭВМ по известным характеристикам локомотива в зависимости от выбранного положения контроллера машиниста. При электрической тяге для более точного расчета тягового усилия электровоза измеряется также напряжение в контактной сети и ток тяговых двигателей. Работа сил сопротивления рассчитывается по рекомендуемой Правилами тяговых расчетов методике в зависимости от плана и профиля участка пути, хранящихся в базе данных (БД).
Затем бортовая ЭВМ, используя оптимизирующий алгоритм, определяет последовательность и время включения тяговых и тормозных режимов локомотива, выдавая их управляющим органам локомотива, при которых поезд будет двигаться по участку по графику ν=f(s), в соответствии с которым прибудет на конечную станцию в заданное время, его скорость будет иметь минимальное отклонение от среднего по участку значения (минимальная величина дисперсии скорости движения D[υ]), а средневзвешенный коэффициент полезного действия локомотива будет максимален.
Для учета возможного изменения зависимости удельного сопротивления движению поезда от скорости, например из-за изменения погодных условий при перемещении поезда, указанные действия циклически повторяются при каждом очередном включенном тяговом или тормозном режиме локомотива.
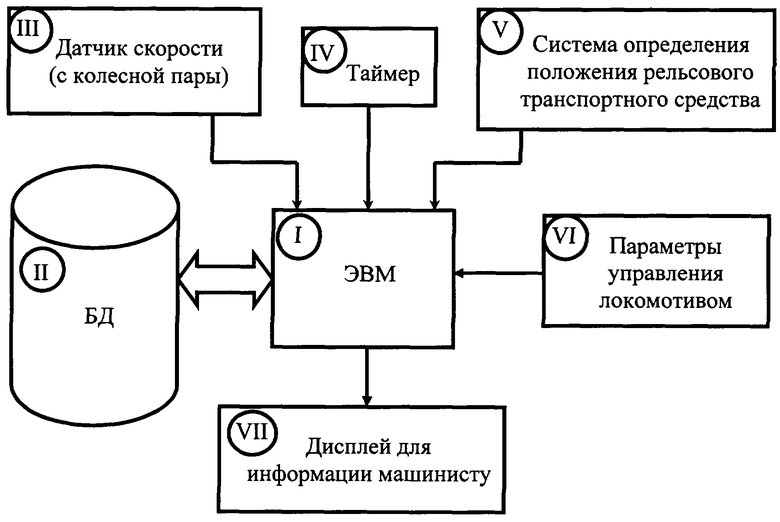
На чертеже изображена схема оборудования, установленного на локомотиве для выбора наиболее экономичного режима движения поезда на заданном участке пути.
Локомотив оснащается бортовой электронной вычислительной машиной (ЭВМ) (I), в памяти которой имеется база данных (БД) (II), в которой сосредоточена информация о поезде, плане и профиле участка движения, постоянных и временных ограничениях скорости, тяговых характеристиках локомотива, прочая информация, необходимая для решения тяговой и тормозной задач. Датчик скорости (III), таймер (IV) и система определения положения рельсового транспортного средства (V), например спутниковая, позволяют контролировать пройденную часть пути и время, оставшееся до установленного графиком движения момента прибытия поезда на конечную станцию.
Параметры управления локомотивом (VI), такие как положение контроллера машиниста, давление в тормозной магистрали, а при электрической тяге, кроме того, напряжение в контактной сети и ток тяговых двигателей, дают возможность фиксировать выбранный машинистом режим движения поезда. Рассчитанный ЭВМ наиболее экономичный режим управления локомотивом выдается на экран дисплея для информации машинисту (VII) или поступает на управляющие органы системы автоведения поезда.
Предлагаемый “Способ выбора наиболее экономичного режима движения поезда на заданном участке пути” осуществляют следующим образом.
Для получения исходных параметров оптимизации энергозатрат на тягу во время первоначального разгона поезда до средней на участке скорости движения на пределе значения коэффициента сцепления колес локомотива с рельсом, т.е. в режиме, считающемся наиболее экономичным, бортовая ЭВМ (I) с заранее заданным шагом приращения пути Δs, зависящим от требуемой точности расчетов, по датчику скорости с колесной пары (III), таймеру (IV) и системе определения положения рельсового транспортного средства (V), например спутниковой, определяется зависимость скорости поезда от пройденного пути ν=f(s). Одновременно по параметрам управления локомотивом (VI) контролируется выбранный машинистом режим движения поезда. ЭВМ произвольным образом разбивает весь участок разгона на три этапа и составляет систему трех уравнений (3) с тремя неизвестными. При этом значения величин АТ1, АT2, АT3, Ay1, Ау2, Ау3, Акр1, Акр2 и Акр3 рассчитываются любым известным численным методом интегрирования по известным тяговым характеристикам локомотива, плану и профилю пути, хранящимся в БД (II). После решения указанной системы уравнений численными методами определяются постоянные коэффициенты а, b и с зависимости удельного сопротивления движению поезда от скорости (1). Эта зависимость будет соответствовать реальным погодным условиям движения конкретного поезда в данной поездке.
Далее для оставшейся части пути с учетом заданного времени прибытия на конечный пункт решается тяговая задача на предмет получения графика движения ν=f(s). По этой зависимости известными методами определяются математическое ожидание M[ν] θ дисперсия D[ν] ρкорости движения. Затем в циклическом режиме выполняется оптимизация графика движения многократным решением тяговой задачи так, чтобы дисперсия скорости движения D[ν] ρ заданной точностью приняла минимальное значение.
После этого осуществляется анализ полученного выше режима управления локомотивом и проверяется возможность повышения средневзвешенного КПД последнего, например, за счет изменения числа тяговых осей локомотива так, чтобы при этом приблизительно сохранились требуемые значения тягового усилия локомотива. Эта задача также решается в циклическом режиме и сопровождается решением тяговой задачи, утонением величин математического ожидания M[ν] θ дисперсии D[ν] ρкорости движения, но теперь с контролем величины средневзвешенного КПД локомотива. Расчеты повторяются до тех пор, пока с заданной точностью не будет достигнут минимум целевой функции (3).
Полученный оптимальный режим управления локомотивом выдается на экран дисплея для информации машинисту (VII) или поступает на управляющие органы системы автоведения поезда. Далее по мере движения поезда ЭВМ контролирует выполнение расчетного графика движения и значение удельного сопротивления движению поезда. В случае существенных изменений, например, последнего из-за изменения погодных условий режим движения поезда оптимизируется повторно.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ ПАРАМЕТРОВ МНОЖЕСТВА ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ, ДЕЙСТВУЮЩИХ В ЖЕЛЕЗНОДОРОЖНЫХ СЕТЯХ С МНОЖЕСТВОМ ПЕРЕСЕЧЕНИЙ | 2007 |
|
RU2466049C2 |
| СИСТЕМА ДЛЯ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОЕЗДОВ ПРИ ДИСПЕТЧЕРСКОЙ ЦЕНТРАЛИЗАЦИИ | 2008 |
|
RU2387564C1 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ ПОЕЗДА С УЧЕТОМ ПАРАМЕТРОВ ВАГОНА | 2007 |
|
RU2605648C2 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ ДВИЖЕНИЯ ПОЕЗДА | 2007 |
|
RU2501695C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ ПОЕЗДА С УЧЕТОМ ПАРАМЕТРОВ ВАГОНА | 2007 |
|
RU2470814C2 |
| БОРТОВОЕ УСТРОЙСТВО ОПРЕДЕЛЕНИЯ ЭФФЕКТИВНОСТИ АВТОТОРМОЗОВ ПОЕЗДА В ПУТИ СЛЕДОВАНИЯ | 2005 |
|
RU2293673C2 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РЕЙСА ДЛЯ ПОЕЗДА | 2007 |
|
RU2484994C2 |
| СПОСОБ И СИСТЕМА ДЛЯ УСОВЕРШЕНСТВОВАНИЯ ТЕХНИКИ ВОЖДЕНИЯ ПОЕЗДОВ И СНИЖЕНИЯ РАСХОДА ТОПЛИВА | 2006 |
|
RU2409484C2 |
| Способ определения нормативного расхода энергоресурса на поездку пригородного мотор-вагонного поезда | 2022 |
|
RU2788656C1 |
| Способ определения основного сопротивления движению как повозки самоходного подвижного состава - способ равновесных скоростей (варианты) | 2019 |
|
RU2723132C1 |
Изобретение относится к области рельсового транспорта и может быть использовано для снижения энергозатрат на тягу при заданном времени прибытия на конечный пункт. Во время первоначального разгона поезда на основании анализа его реакции на выбранный машинистом режим управления локомотивом посредством бортовой ЭВМ рассчитывают удельное сопротивление поезда. Затем в циклическом режиме решают тяговую задачу на предмет получения оптимального графика движения v=f(s), имеющего минимальное значение дисперсии скорости движения D[v], для заданного времени прибытия на конечный пункт. Также циклически подбирают режим управления локомотивом, позволяющий получить при оптимальном графике движения максимальный средневзвешенный КПД последнего на заданном участке. Рекомендуемый режим поступает на дисплей для информации машинисту или вводится в систему автоведения поезда. По мере движения поезда по его реакции на управляющие команды в той же последовательности уточняют зависимость его удельного сопротивления от скорости и оптимизируют график движения, корректируя режим управления. 1 ил.
Способ выбора наиболее экономичного режима движения поезда на заданном участке пути, отличающийся тем, что для получения исходных параметров оптимизации энергозатрат на тягу во время первоначального разгона поезда при контроле параметров управления локомотивом на каждом из трех произвольным образом выбранных этапах разгона измеряют длину пройденного поездом пути и его скорость в начале и конце этапа, по которым вычисляют зависимость удельного сопротивления движению поезда от скорости, используемую оптимизирующим алгоритмом для определения последовательности и времени включения тяговых и тормозных режимов локомотива, и выдают их управляющим органам локомотива, при которых поезд будет двигаться по участку по графику v=f(s), в соответствии с которым прибудет на конечную станцию в заданное время, его скорость будет иметь минимальное отклонение от среднего по участку значения (минимальная величина дисперсии скорости движения D[v]), а средневзвешенный коэффициент полезного действия локомотива будет максимален, причем для учета возможного изменения зависимости удельного сопротивления движению поезда от скорости, например из-за изменения погодных условий при перемещении поезда, указанные действия циклически повторяют при каждом очередном включенном тяговом или тормозном режиме локомотива.
| Устройство для управления приводно-тормозной системой рельсового транспортного средства | 1989 |
|
SU1816271A3 |
| RU 94015510, 27.08.1996 | |||
| УСТРОЙСТВО ДЛЯ СИГНАЛИЗАЦИИ ОПАСНОГО СБЛИЖЕНИЯ САМОЛЕТА С ЗЕМЛЕЙ | 1983 |
|
SU1293948A1 |
| DE 19935349 А1, 01.02.2001 | |||
| DE 3408521 А1, 12.09.1985. | |||

