ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Область техники изобретения относится к оптимизации эксплуатации поезда, а более точно к контролированию и управлению функционированием поезда для улучшения эффективности при удовлетворении ограничений графика.
УРОВЕНЬ ТЕХНИКИ
Локомотивы являются сложными системами с многочисленными подсистемами, при этом каждая подсистема является зависящей от других подсистем. Машинист находится на борту локомотива для обеспечения правильного функционирования локомотива и связанной с ним нагрузки из грузовых вагонов. В дополнение к обеспечению правильного функционирования локомотива, машинист также отвечает за определение рабочей скорости поезда и сил, действующих внутри поезда, частью которого является локомотив. Для выполнения этой функции машинист обычно должен иметь большой опыт в эксплуатации локомотива и различных поездов на определенной местности. Это знание требуется для соблюдения предписанной рабочей скорости, которая может изменяться вместе с местоположением поезда по пути. Более того, машинист также отвечает за обеспечение того, что действующие внутри поезда силы остаются в допустимых пределах.
Тем не менее, даже со знанием для обеспечения безопасного функционирования, машинист обычно не может управлять локомотивом так, чтобы потребление топлива было минимизировано для каждого рейса. Например, другие факторы, которые необходимо принимать во внимание, могут включать в себя выпуск выбросов, условия окружающей среды машиниста, такие как шум/вибрация, взвешенная комбинация потребления топлива и выпуска выбросов и т.д. Это трудно выполнить, поскольку, например, размер и загрузка поездов изменяются, локомотивы и их топливные характеристики/характеристики выбросов различаются, а погода и условия движения изменяются. Машинисты могли бы более эффективно управлять поездом, если они были бы обеспечены средствами для определения лучшего способа управления поездом в заданный день для удовлетворения требуемому графику (времени прибытия) при использовании наименьшего возможного количества топлива, несмотря на источники непостоянства.
КРАТКОЕ ОПИСАНИЕ
Варианты осуществления изобретения раскрывают систему для управления поездом, имеющим один или более локомотивных составов, где каждый локомотивный состав содержит один или более локомотивов. В примерном варианте осуществления система содержит компонент - локатор для определения местоположения поезда. Также предусмотрен описывающий путь компонент для предоставления информации о пути. Система также имеет узел обработки, выполненный с возможностью получения информации от компонента - локатора и описывающего путь компонента. Также предусмотрен алгоритм, который реализован в рамках узла обработки, имеющий доступ к информации для создания плана рейса, который оптимизирует параметры функционирования локомотивного состава в соответствии с одним или более эксплуатационными критериями поезда.
Вариант осуществления настоящего изобретения также раскрывает систему для управления поездом, имеющим один или более локомотивных составов, где каждый локомотивный состав включает в себя один или более локомотивов. Способ содержит определение местоположение поезда на пути. Способ также определяет характеристики пути. Способ дополнительно создает план рейса на основе расположения поезда, характеристик пути и условия функционирования локомотивного состава в соответствии с по меньшей мере одним эксплуатационным критерием.
Вариант осуществления настоящего изобретения также раскрывает код компьютерного программного обеспечения для управления поездом, имеющим компьютерный узел обработки, и один или более локомотивных составов, где каждый локомотивный состав включает в себя один или более локомотивов. Код компьютерного программного обеспечения содержит программный модуль для создания плана рейса на основе расположения поезда, характеристик пути и условия функционирования локомотивного состава в соответствии с по меньшей мере одним эксплуатационным критерием поезда.
Примерный вариант осуществления настоящего изобретения дополнительно раскрывает способ для управления поездом, имеющим один или более локомотивных составов, где каждый локомотивный состав включает в себя один или более локомотивов, где план пути был продуман для поезда. Способ содержит определение режима функционирования для локомотивного состава на основе плана пути. Способ также управляет локомотивным составом при установочном параметре мощности. Собирается действительная скорость поезда, действительный установочный параметр мощности локомотивного состава и/или местоположение поезда. Действительная скорость поезда, действительный параметр мощности локомотивного состава и/или расположение поезда сравниваются с установочным параметром мощности.
Другой примерный вариант осуществления настоящего изобретения дополнительно раскрывает способ для управления поездом, имеющим один или более локомотивных составов, где каждый локомотивный состав включает в себя один или более локомотивов, где план пути был продуман для поезда на основе предполагаемых эксплуатационных параметров для поезда и/или локомотивного состава. Способ содержит оценочные эксплуатационные параметры поезда и/или эксплуатационные параметры локомотива. Способ дополнительно содержит сравнивание оценочных параметров поезда и/или оценочных параметров локомотивного состава с предполагаемыми операционными параметрами поезда и/или операционными параметрами локомотивного состава.
Другой примерный вариант осуществления настоящего изобретения дополнительно раскрывает способ для управления поездом, имеющим один или более локомотивных составов, где каждый локомотивный состав включает в себя один или более локомотивов, где план пути был продуман для поезда на основе требуемого параметра. Способ содержит определение эксплуатационных параметров поезда и/или локомотивного состава, определение требуемого параметра на основе определенных эксплуатационных параметров и сравнение определенного параметра с эксплуатационными параметрами. Если существует разница из сравнения определенного параметра с эксплуатационными параметрами, способ дополнительно включает в себя корректировку плана рейса.
Примерный вариант осуществления настоящего изобретения также раскрывает систему для управления железнодорожной системой, имеющей один или более локомотивных составов, где каждый локомотивный состав включает в себя один или более локомотивов. Способ содержит определение местоположения поезда на пути и определение характеристик пути. Способ дополнительно содержит создание плана управления для по меньшей мере одного из локомотивов на основе расположения рельсовой системы, характеристики пути и/или эксплуатационных условий локомотивного состава, для минимизации потребления топлива рельсовой системой.
Другой примерный вариант осуществления настоящего изобретения дополнительно раскрывает способ для управления железнодорожной системой, имеющей один или более локомотивных составов, где каждый локомотивный состав включает в себя один или более локомотивов. С этой стороны способ содержит определение местоположения поезда на пути и определение характеристик пути. Способ дополнительно содержит предоставление управления силовой установкой локомотивному составу для того, чтобы минимизировать потребления топлива железнодорожной системой.
ЧЕРТЕЖИ
Далее подробное описание примеров изобретения, кратко описанных выше, будет представлено ссылкой на определенные варианты его осуществления, которые проиллюстрированы в приложенных чертежах. Понимая, что эти чертежи отображают только типичные варианты осуществления изобретения и таким образом не должны рассматриваться как ограничивающие его объем, изобретение будет описано и объяснено с дополнительной спецификой и подробностью посредством использования прилагаемых чертежей, на которых:
Фиг. 1 изображает примерное изображение схемы последовательности операций примерного варианта осуществления настоящего изобретения;
Фиг. 2 изображает упрощенную модель поезда, которая может быть использована;
Фиг. 3 изображает примерное изображение компонентов примерного варианта осуществления настоящего изобретения;
Фиг. 4 изображает примерный вариант осуществления кривой использованного топлива/времени пути;
Фиг. 5 изображает примерный вариант разбиения на сегменты для планирования пути;
Фиг. 6 изображает примерный вариант примера разбиения на сегменты;
Фиг. 7 изображает примерную схему последовательности операций примерного варианта осуществления настоящего изобретения;
Фиг. 8 изображает примерное изображение динамического устройства отображения для использования машинистом;
Фиг. 9 изображает другое примерное изображение динамического устройства отображения для использования машинистом;
Фиг. 10 изображает другое примерное изображение динамического устройства отображения для использования машинистом.
ПОДРОБНОЕ ОПИСАНИЕ
Далее будет сделана подробная ссылка на предпочтительные варианты осуществления, согласующиеся с настоящим изобретением, примеры которых проиллюстрированы на сопроводительных чертежах. Где только возможно, одни и те же ссылочные номера будут использоваться на всем протяжении чертежей, для ссылки на одни и те же или подобные детали.
Примерные варианты осуществления настоящего изобретения решают задачи области техники посредством предоставления системы, способа и машинно-реализуемого способа для определения и реализации стратегии управления поездом, имеющим локомотивный состав, определяющим подход к контролю и управлению функционированием поезда для улучшения требований к параметрам определенных целевых эксплуатационных критериев, при этом удовлетворяя ограничениям графика и скорости. На всем протяжении этого раскрытия используется термин "настоящее изобретение" или "изобретение". Даже если термин "примерный(е) вариант(ы) осуществления" не продолжает немедленно вышеупомянутый термин, значение "настоящее изобретение" или изобретение читается как значащее "примерный(е) вариант(ы) осуществления настоящего изобретения". Настоящее изобретение также осуществимо, когда локомотивный состав находится в распределенном механизированном управлении.
Специалист в данной области техники признает, что устройство, такое как система обработки данных, включающая в себя ЦПУ, память, вход/выход, хранилище программ, шину соединения и другие аппаратные компоненты, может быть запрограммировано или иным способом разработано для содействия осуществлению способа изобретения. Такая система будет включать в себя соответствующие программные средства для выполнения способа изобретения.
Также изделие, такое как предварительно записанный диск или другой подобный компьютерный программный продукт, для использования с системой обработки данных, могло бы включать в себя носитель хранения и программные средства, записанные на нем для направления системы обработки данных для содействия осуществлению способа изобретения. Такое устройство и изделия также попадают в пределы сущности и объема изобретения.
Вообще говоря, техническим эффектом является определение и реализация стратегии управления поездом, имеющим локомотивный состав, определяющий подход к контролю и управлению функционированием поезда для улучшения определенных требований к параметрам целевых эксплуатационных критериев, при этом удовлетворяя ограничениям графика и скорости. Для облегчения понимания настоящего изобретения оно будет описано в дальнейшем со ссылкой на отдельные варианты его осуществления. Изобретение описано в общем контексте машинно-исполняемых инструкций, к примеру, программных модулей, являющихся исполняемыми компьютером. Как правило, программные модули включают в себя процедуры, программы, объекты, компоненты, структуры данных и так далее, которые выполняют конкретные задачи или реализуют конкретные абстрактные типы данных. Например, программно реализованные программы, которые лежат в основе изобретения, могут быть закодированы на различных языках, для использования с различными платформами. В описании, которое последует, примеры изобретения описаны в контексте веб-портала, который использует веб-браузер. Тем не менее, будет принято во внимание, что принципы, которые лежат в основе изобретения, могут быть также реализованы совместно с другими типами компьютерных технологий.
Более того, специалист в данной области техники примет во внимание, что изобретение может быть реализовано на практике с другими конфигурациями вычислительных систем, включая в себя "карманные" устройства, многопроцессорные системы, основанную на микропроцессорах или программируемую бытовую электронную аппаратуру, сетевые ПЭВМ, мини-ЭВМ, универсальные вычислительные машины и т.п. Изобретение, к тому же, может быть осуществлено на практике в распределенной вычислительной среде, где задачи выполняются удаленными устройствами обработки, которые связаны через сеть передачи данных. В распределенном вычислительном окружении программные модули могут быть расположены в носителе хранения и локальной, и удаленной вычислительной машины, включающем в себя запоминающие устройства памяти. Эти локальные и дистанционные компьютерные среды могут содержаться полностью в локомотиве, или соседних локомотивах в составе, или вне них на путевой полосе или центральных офисах, где используется беспроводная связь.
На всем протяжении этого документа используется термин "локомотивный состав". В качестве используемого в этом документе локомотивный состав может быть охарактеризован как имеющий один или более локомотивов подряд, соединенных вместе, для того, чтобы предоставлять возможность приведения в движение двигателем и/или торможения. Локомотивы соединены вместе, так что между локомотивами нет вагонов поезда. Поезд может иметь более одного состава в своей структуре.
А именно, может быть головной состав, и более одного расположенные на расстоянии составы, такие как находящийся посредине в ряду вагонов и другой отдаленный состав на конце поезда. Каждый локомотивный состав может иметь первый локомотив и хвостовой локомотив(ы). Хотя состав обычно рассматривается как следующие друг за другом локомотивы, специалист в данной области техники без труда признает, что состав группы локомотивов может быть признан составом, даже если по меньшей мере один вагон разделяет локомотивы, например, когда состав скомпонован для распределенного механизированного управления, где команды набора скорости и торможения передаются от ведущего локомотива к расположенным на расстоянии хвостам по радиосвязи или физическому кабелю. С этой стороны, термин "локомотивный состав" не должен рассматриваться как ограничивающий фактор, когда обсуждается несколько локомотивов в пределах одного поезда.
Обращаясь теперь к чертежам, будут описаны варианты осуществления настоящего изобретения. Изобретение может быть реализовано многочисленными способами, включающими в себя как систему (включающую в себя компьютерную систему обработки данных), способ (включающий в себя компьютеризированный способ), устройство, машиночитаемый носитель, компьютерный программный продукт, графический интерфейс пользователя, включающий в себя веб-портал, или структуру данных, материально зафиксированную в машиночитаемой памяти. Различные варианты осуществления изобретения рассматриваются ниже.
Фиг. 1 изображает примерное изображение схемы последовательности операций настоящего изобретения. Как проиллюстрировано, команды, характерные для планирования рейса, вводятся либо на борту, либо из отдаленного расположения, такого как диспетчерский центр 10. Такая вводимая информация включает в себя, но не ограничена, положением поезда, описанием состава (таким как модели локомотива), описания мощности локомотива, характеристикой передачи тягового усилия локомотива, потреблением двигательного топлива как функцией выходной мощности, характеристиками охлаждения, планируемым путем рейса (эффективный уклон пути и кривизна как функция мильных столбов или компонент «эффективного уклона» для отображения кривизны, следуя стандартной железнодорожной практике), поездом, представленным составом вагонов и нагрузкой вместе с эффективными коэффициентами сопротивления, требуемыми параметрами рейса, включающими в себя, но не ограниченными, временем и местом отправления, местом прибытия, требуемым временем пути, идентификацией экипажа (пользователь и/или машинист), временем окончания смены экипажа и курсом.
Эти данные могут быть предоставлены локомотиву 42 различными способами, такими как, но не ограниченными, вводом оператором вручную этих данных в локомотив 42 с помощью имеющегося на борту дисплея, вставки устройства памяти, такого как жесткая карточка и/или USB накопитель, содержащих данные, в приемник, находящийся на борту локомотива, и передачей информации через беспроводную связь от центрального или путевого расположения 41, такого как путевое сигнальное устройство и/или путевое устройство, локомотиву 42. Характеристики нагрузки локомотива 42 и поезда 31 (например, лобовое сопротивление) могут также меняться по пути (например, с высотой над уровнем моря, температурой окружающей среды и состоянием рельсов и железнодорожных вагонов), и план может быть обновлен для отображения таких изменений, как требуется, любым из способов, описанных выше и/или автономным сбором в реальном времени условий для локомотива/поезда. Это включает в себя, например, изменения в характеристиках локомотива или поезда, обнаруженных контролирующим оборудованием на борту или вне локомотива(ов) 42.
Система путевой сигнализации определяет допустимую скорость поезда. Существует много типов систем путевой сигнализации и правил эксплуатации, связанных с каждым из сигналов. Например, некоторые сигналы имеют один свет (вкл/выкл), некоторые сигналы имеют единственные линзы с различными цветами, а некоторые сигналы имеют различные фонари и цвета. Эти сигналы могут обозначать, что путь свободен и поезд может следовать на максимальной допустимой скорости. Они также могут обозначать, что требуется уменьшенная скорость или остановка. Может быть нужно, чтобы эта уменьшенная скорость была достигнута немедленно или в определенном месте (например, до следующего сигнала или переезда).
Статус сигнала передается поезду и/или оператору с помощью различных средств. Некоторые системы имеют цепи в самом пути и индуктивные катушки-съемники на локомотивах. Другие системы имеют беспроводные системы связи. Системы сигнализации могут также требовать, чтобы оператор визуально проверял сигнал и совершал соответствующие действия.
Системы сигнализации могут согласовываться с системами сигнализации на борту и корректировать скорость локомотива согласно входным данным и соответствующим рабочим скоростям. Для систем сигнализации, которые требуют от машиниста визуального контроля статуса сигнала, экран оператора будет представлять соответствующие сигналу варианты выбора для ввода машинистом на основе местоположения поезда. Тип систем сигнализации и правил функционирования как функция от местоположения может быть сохранен в базе 63 данных на борту.
На основе ввода данных детализации в настоящее изобретение рассчитываются оптимальный план, который минимизирует использование топлива и/или производимых выхлопов в зависимости от ограничений пределов скорости по пути с требуемыми временами отправки и прибытия для создания профиля 12 рейса. Профиль содержит установочные параметры оптимальной скорости и мощности (отметка), которым должен следовать поезд, выраженные как функции расстояния и/или времени, и такие пределы функционирования поезда, включающие в себя, но не ограниченные установочными параметрами максимальной отметки мощности и торможения, и пределами скорости как функции от местоположения, и предполагаемым использованным топливом и созданными выхлопами. В примерном варианте осуществления значение установочного параметра отметки выбирается для получения решений об изменении положения рукоятки регулятора скорости около одного раза в 10-30 секунд. Специалист в данной области техники без труда примет во внимание, что решения об изменении положения рукоятки регулятора скорости могут возникать через более длинные или короткие периоды, если требуется и/или желательно следовать профилю оптимальной скорости. В более широком смысле, специалисту в данной области техники будет очевидно, что профили предоставляют установки мощности для поезда, на уровне поезда, уровне состава и/или уровне индивидуального поезда. Мощность включает в себя мощность торможения, мощность вращения двигателя и мощность пневматического тормоза. В другом предпочтительном варианте осуществления вместо функционирования при традиционных дискретных параметрах отметки мощности, настоящее изобретение способно выбирать непрерывные установки мощности, определенные в качестве оптимальных для выбранного профиля. Таким образом, например, если оптимальный профиль определяет установочный параметр отметки 6.8, вместо функционирования на установочном параметре отметки 7, локомотив 42 может функционировать на 6.8. Допущение таких промежуточных установочных параметров мощности может привнести дополнительные преимущества эффективности, как описано ниже.
Процедура, используемая для вычисления оптимального профиля, может быть любым количеством способов для вычисления ряда мощности, который приводит поезд 31 для минимизации потребления топлива и выбросов, при условии функционирования локомотива и ограничений графика, как просуммировано ниже. В некоторых случаях требуемый оптимальный профиль может быть достаточно близок к предварительно определенному по причине сходности конфигурации поезда, пути и окружающих внешних условий. В этих случаях может быть достаточно найти траекторию управления в базе 63 данных и попытаться следовать ей. Если нет пригодного предварительно вычисленного плана, способы вычисления нового плана включают в себя, но не ограничены, прямым вычислением оптимального профиля с использованием моделей из дифференциальных уравнений, которые аппроксимируют физику движения.
Установка включает в себя выбор количественной целевой функции, в большинстве случаев, взвешенную сумму (интеграл) переменных модели, которые соответствуют скорости потребления топлива и генерации выбросов, плюс элемент для штрафования излишнего варьирования скорости.
Формулировка оптимального управления достигается в минимизации количественной целевой функции при условии ограничений, включающих в себя, но не ограниченных, пределами скорости и минимальными и максимальными установочными параметрами мощности (скорости). В зависимости от целей планирования в любое время задача может быть гибко приспособлена для минимизации топливного объекта для ограничений по пределам выбросов и скорости или для минимизации выбросов, при условии ограничений по топливу и времени прибытия. Также возможно установить, например, в качестве цели минимизацию общего времени в пути без ограничений по общим выбросам или использованию топлива, где такое ослабление ограничений может быть разрешено или требуемо для выполняемой целевой задачи.
Математически задача, которая должна быть решена, может быть сформулирована более точно. Основная физика выражается посредством:
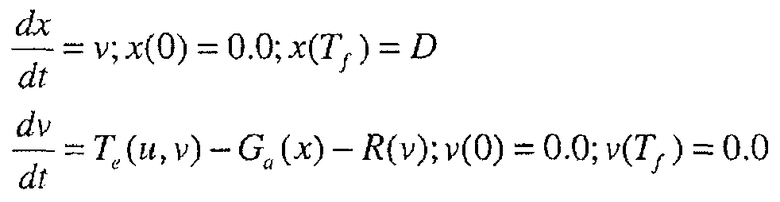
где x - положение поезда, v - его скорость, а t - время (в милях, милях в час или минутах и часах, как предопределено), и u - ввод команды отметки (скорости). Далее, D обозначает расстояние, которое должно быть пройдено, Tf - требуемое время прибытия на расстоянии D по пути, Te - сила тяги транспортного средства, производимой локомотивным составом, Ga - гравитационная тормозящая сила, которая зависит от длины поезда, состава поезда и местности, на которой расположен поезда, R - общее зависящее от скорости сопротивление комбинации из локомотивного состава и поезда. Начальная и конечная скорости могут также быть заданы, но без потери общности здесь принимаются нулевыми (поезд остановлен в начале и конце). В конечном счете модель легко модифицируется для того, чтобы включать в себя другие важные динамические свойства, такие как задержка между изменениями скорости, u, и результирующее тяговое усилие или торможение. Используя эту модель, формулировка оптимального управления достигается в минимизации количественной целевой функции при условии ограничений, включающих в себя, но не ограниченных, пределами скорости и минимальными и максимальными установочными параметрами мощности (скорости). В зависимости от целей планирования в любое время задача может быть гибко приспособлена для минимизации топливного объекта для ограничений по пределам выбросов и скорости или для минимизации выбросов, при условии ограничений по топливу и времени прибытия.
Также возможно установить, например, в качестве цели минимизировать общее время в пути без ограничений по общим выбросам или использованию топлива, где такое ослабление ограничений может быть разрешено или требуемо для выполняемой целевой задачи. Эти критерии эффективности могут быть выражены как линейная комбинация любого из следующего:
 - Минимизирует общее потребление топлива
- Минимизирует общее потребление топлива
 - Минимизирует время в пути
- Минимизирует время в пути
 - Минимизирует предельный переход (кусочно-постоянный ввод)
- Минимизирует предельный переход (кусочно-постоянный ввод)
 - Минимизирует предельный переход (непрерывный ввод)
- Минимизирует предельный переход (непрерывный ввод)
4. Замените выражение F топлива в (1) выражением, соответствующим выработке выбросов. Широко применимая и характерная целевая функция является такой

Коэффициенты линейной комбинации будут зависеть от важности (веса), заданного для каждого из членов. Заметим, что в уравнении (OP) u(t) - оптимизирующая переменная, которая является непрерывным положением отметки. Если требуется дискретная отметка, например, для более старых локомотивов, решение уравнения (OP) может быть дискретизировано, что может иметь результатом меньшее сбережение топлива. Нахождение решения минимального времени (α1 и α2 установлены в 0) используется для нахождения нижнего предела, предпочтительным вариантом осуществления является решение уравнения (OP) для различных значений Tf c α3, установленных в 0. Для специалистов, знакомых с такими оптимальными задачами, может быть необходимо приложить ограничения, например пределы скорости по пути:
Или, когда используется минимальное время в качестве цели, что должно удовлетворять ограничение в конечной точке, например общее потребленное топливо должно быть меньше, чем то, что в баке, например с помощью:
где WF - остающееся в баке топливо на Tf. Специалист в данной области техники без труда признает, что уравнение (OP) может быть также и в других формах и что то, что представлено выше, является примерным уравнением для использования в настоящем изобретении.
Упоминание выбросов в контексте настоящего изобретения фактически направлено на суммарные выбросы, производимые в виде оксидов азота (NOx), несгоревших углеводородов и твердых частиц выхлопных газов. Каждый локомотив по конструкции должен быть совместим со стандартами Управления по охране окружающей среды (EPA) для характерных для тормоза выбросов, и таким образом, когда в настоящем изобретении оптимизируются выбросы, это будут общие выбросы задачи, на которые сегодня не существует спецификации. Все время функционирование должно быть совместимо с федеральными поручениями Управления по охране окружающей среды (EPA). Если главной целевой функцией во время рейса является снижение выбросов, формулировка оптимального управления, уравнение (OP), будет изменено для учета этой цели рейса. Ключевой гибкостью в настройке оптимизации является то, что любая или все из целевых функций рейса могут изменяться в соответствии с районом или целью. Например, для высокоприоритетного поезда минимальное время может быть единственной целевой функцией на пути, поскольку это высокоприоритетный поток. В другом примере, производство выбросов может меняться от штата к штату по планируемому пути поезда.
Для решения результирующей задачи оптимизации, в примерном варианте осуществления настоящее изобретение расшифровывает задачу динамического оптимального управления во временном интервале в эквивалентную статистическую задачу математического программирования с N переменными решения, где N зависит от частоты, с которой делаются корректировки набора скорости и торможения и длительности рейса. Для типичной задачи, это N может быть в тысячах. Например, в примерном варианте осуществления, предположим, что поезд проходит по 172-мильной протяженности пути на северо-востоке Соединенных Штатов. Используя настоящее изобретение, примерные 7,6% экономии использованного топлива могут быть реализованы, когда сравнивают рейс, определенный и следуемый с использованием настоящего изобретения, в сравнении с историей набора скорости/торможения реального водителя, где рейс определялся оператором. Улучшенная экономия реализуется, потому что оптимизация, реализуемая посредством использования настоящего изобретения, создает стратегию управления с меньшей потерей на сопротивление движению и маленькой или без потери торможения в сравнении с планом рейса оператора.
Чтобы выполнить оптимизацию, описанную выше, непрерывно расшифровываемой, может быть использована упрощенная модель поезда, такая как проиллюстрированная на фиг. 2, и уравнения, рассмотренные выше. Ключевое улучшение в оптимальном профиле создается управлением более подробной модели с создаваемым оптимальным рядом мощности, для проверки, нарушены ли другие температурные, электрические или механические ограничения, приводящие к измененному профилю со скоростью в зависимости от расстояния, которая является наиболее близкой к движению, которое может быть получено без повреждения оборудования локомотива или поезда, т.е. удовлетворяя дополнительные предполагаемые ограничения, такие как температурные и электрические пределы локомотива и действующие между вагонов силы в поезде.
Обращаясь обратно к фиг. 1, как только рейс начался 12, создаются команды мощности 14 для приведения плана в движение. В зависимости от установки функционирования настоящего изобретения, одной командой является команда для локомотива следовать оптимизированной команде 16 мощности с тем, чтобы получить оптимальную скорость. Настоящее изобретение получает оптимальную скорость и информацию мощности от локомотивного состава поезда 18. Вследствие неизбежных приближений в моделях, используемых для оптимизации, вычисление замкнутого цикла корректировок для оптимизированной мощности получается для записи требуемой оптимальной скорости. Такие корректировки пределов функционирования поезда могут быть сделаны автоматически или машинистом, который всегда имеет конечное управление поездом.
В некоторых случаях используемая в оптимизации модель может существенно отличаться от настоящего поезда. Это может происходить из-за разных причин, включающих в себя, но не ограниченных, дополнительными подборами груза или расположениями, локомотивами, которые не достигли цели пути, и ошибками в первоначальной базе 63 данных или вводе данных оператором. По этим причинам система контроля находится в положении, которое использует данные поезда в реальном времени для оценки параметров локомотива и/или поезда в реальном времени 20. Оцененные параметры затем сравниваются с предполагаемыми параметрами, использованными, когда рейс был первоначально создан 22. На основе любых отклонений между предполагаемыми и оцененными значениями рейс может быть перепланирован 24, когда довольно большая экономия может происходить из нового плана.
Другие причины для того, чтобы рейс мог быть перепланирован, включают в себя команды от удаленного расположения, такие как запрос диспетчерской службы или оператора смены в целях, чтобы они согласовались с более общими целями планирования движения. Более общие цели планирования движения могут включать в себя, но не ограничивать, графики других поездов с учетом рассеивания выхлопных газов из тоннеля, обслуживающими работами и т.д. Другой причиной может быть следствие ошибки компонента на борту. Стратегии для перепланирования могут быть сгруппированы в инкрементальные и крупные корректировки, в зависимости от серьезности нарушения, как будет обсуждено более подробно ниже. В целом, "новый" план должен быть производным от решения уравнения (OP) задачи оптимизации, описанного выше, но зачастую могут быть найдены более быстрые приближенные решения, как описано в данном документе.
При функционировании локомотив 42 будет постоянно контролировать эффективность системы и непрерывно обновлять план рейса на основе фактической измеренной эффективности, всякий раз, когда такое обновление будет улучшать характеристики рейса. Вычисления перепланирования могут выполняться целиком в пределах локомотива(ов) или целиком или частично переданными на удаленное расположение, такое как диспетчерские или путевые средства обработки, где беспроводные технологии используются для передачи планов локомотиву 42. Настоящее изобретение может также создавать тренды эффективности, которые могут быть использованы для разработки данных парка локомотивов касательно функций переноса эффективности. Общие для парка данные могут быть использованы, когда определяется первоначальный план поезда, и могут быть использованы для общесетевой оптимизации согласования при рассмотрении положений множества поездов. Например, кривая согласования использования топлива во время движения, как проиллюстрировано на фиг. 4, отображает возможности поезда на отдельно взятом пути в текущее время, скорректированная из множества средних, собранных для множества поездов на одном и том же пути. Таким образом, кривые накопления центрального диспетчерского средства обработки, подобные представленным на фиг. 4, от множества локомотивов могут использовать эту информацию для лучшей координации общего движения поездов для достижения общесистемной выгоды в использовании топлива или в пропускной способности.
Многие события при ежедневном функционировании могут приводить к необходимости генерации или модификации исполняемого в настоящий момент плана, где желательно сохранить те же целевые функции рейса, когда поезд не присутствует в графике для планируемой встречи или расхождения с другим поездом и он требует времени наверстывания отставания. Используя фактическую скорость, мощность и расположение локомотива, делается сравнение между планируемым временем прибытия и текущим оцениваемым (предсказываемым) временем прибытия 25. На основе разницы во временах, так же как и разницы в параметрах (обнаруженных или измененных диспетчерской службой или оператором), план корректируется 26. Эта корректировка может быть выполнена автоматически, следуя требованию железнодорожной компании в том, как такие отходы от плана должны обрабатываться, или вручную предлагаются альтернативы для машиниста на борту и диспетчера совместно выбрать лучший способ вернуться обратно к плану. Всякий раз, когда план изменяется, но когда существуют исходные цели, такие как, но не ограниченные временем прибытия, которые остаются теми же, дополнительные изменения могут быть факторизированы одновременно, например новые изменения в пределах будущей скорости, которые могут повлиять на осуществимость или даже возврат исходного плана. В таких случаях если исходный план пути не может быть сохранен или, другими словами, поезд не может достичь исходных целей плана пути, как обсуждается в данном документе, другие планы рейса могут быть представлены машинисту и/или удаленному средству обслуживания, или диспетчеру.
Перепланирование также может быть выполнено, когда требуется изменить исходные цели. Такое перепланирование может быть выполнено как в предварительно запланированные моменты времени, в ручном режиме по выбору машиниста или диспетчера, или автономно, когда превышены предопределенные пределы, такие как пределы функционирования поезда. Например, если выполнение текущего плана запаздывает более определенного порогового значения, такого как тридцать минут, настоящее изобретение может перепланировать рейс для обеспечения задержки при расходе увеличенного топлива, как описано выше, или предупредить машиниста и диспетчера, сколько времени в целом может быть компенсировано (т.е. какое минимальное время должно пройти или максимальное топливо, которое может быть сохранено в пределах временных ограничений). Другие пусковые схемы для перепланирования могут быть представлены на основе потребленного топлива или состояния силового состава, включающего в себя, но не ограниченного временем прибытия, потерей лошадиных сил вследствие отказа оборудования и/или временного нарушения работоспособности оборудования (такого, как функционирование со слишком высокой или слишком низкой температурой) и/или обнаружением грубых ошибок настройки, таких как в предполагаемой нагрузке поезда. То есть, если изменение отражает ухудшение в эксплуатационных качествах локомотива для текущего рейса, это может быть факторизировано в модели и/или уравнениях, используемых в оптимизации.
Изменения в целях плана могут также происходить из-за потребности координировать события, когда план для одного поезда подвергает риску возможность другого поезда удовлетворять целям, и из-за потребности разрешения конфликтов на разных уровнях, например требуется диспетчерская служба. Например, координирование встреч и пропусков может быть дополнительно оптимизировано благодаря связи между поездами. Таким образом, как в примере, если машинист поезда знает, что он позади при достижении положения для встречи и/или пропуска, связь с другого поезда может уведомить опаздывающий поезд (и/или диспетчера). Машинист может затем ввести информацию, имеющую отношение к опозданию, в настоящем изобретении, где настоящее изобретение будет пересчитывать план рейса поезда. Настоящее изобретение может также быть использовано на высоком уровне, или сетевом уровне, для предоставления возможности диспетчеру определить, какой поезд должен замедлиться или ускориться, могут ли быть не удовлетворены временные ограничения запланированной встречи или пропуска. Как обсуждается в данном документе, это совершается поездами, передающими данные на диспетчерский центр для задания приоритетов, как каждый поезд должен изменить цели его планирования. Выбор может зависеть от выгод графика или экономии топлива, в зависимости от ситуации.
Для любых из запущенных в ручном режиме или автоматически запущенных перепланировок настоящее изобретение может представлять более одного плана рейса машинисту. В примерном варианте осуществления настоящего изобретения машинисту будут представлены различные профили, предоставляя возможность машинисту выбирать время прибытия и осуществлять соответствующее воздействие на топливо и/или выбросы. Такая информация также может быть предоставлена диспетчеру для сходного анализа, либо как простой список альтернатив и как множество кривых, таких как проиллюстрированные на фиг. 4.
Настоящее изобретение имеет способность к обучению и адаптации ключевых изменений в поезде и силовом составе, которые могут быть включены в текущий план и/или в будущие планы. Например, одной из пусковых схем, рассмотренных выше, является потеря мощности, выраженной в лошадиных силах (л.с.). При наращивании мощности в л.с. по времени либо после потери мощности в л.с. или во время начала рейса используется логика перехода для определения того, когда достигается требуемая мощность. Эта информация может быть сохранена в базе 61 данных локомотива для использования в оптимизации будущих рейсов или текущего рейса, возникнет ли снова потеря мощности.
Фиг. 3 изображает примерный вариант осуществления элементов настоящего изобретения. Предусмотрен компонент-локатор 30 для определения расположения поезда 31. Компонент-локатор 30 может быть датчиком GPS или системой датчиков, которые определяют местоположение поезда 31. Примеры таких других систем могут включать в себя, но не ограничены, путевыми устройствами, такими как ярлыки оборудования радиочастотной автоматической идентификации (RF AEI), диспетчерская связь и/или видеоопределение. Другая система может включать в себя тахометр(ы) на борту локомотива и расчеты расстояния от опорной точки. Как было рассмотрено ранее, система 47 беспроводной связи может также быть предусмотрена для предоставления возможности связи между поездами и/или с удаленным расположением, такая как диспетчерская связь. Информация о местоположениях поездки может также быть передана от других поездов.
Также предусмотрен описывающий путь компонент 33 для предоставления информации о пути, в основном информации об уклоне, возвышении и изгибе. Описывающий путь компонент 33 может включать в себя расположенную на борту базу 36 данных сохранности пути. Датчики 38 используются для измерения силы 40 тяги, создаваемой локомотивным составом 42, установочный параметр положения рукоятки регуляторов скорости локомотивного состава 42, конфигурацию отдельных локомотивов 42, мощность индивидуального локомотива и т.д. В примерном варианте осуществления информация о конфигурации локомотивного состава 42 может быть загружена без использования датчиков 38, а вводиться посредством других подходов, как рассмотрено выше. Более того, также может быть принято во внимание состояние локомотивов в составе. Например, если один локомотив в составе не может функционировать выше уровня 5 отметки мощности, эта информация используется при оптимизации плана рейса.
Информация от компонента-локатора может также быть использована для определения подходящего времени прибытия поезда 31. Например, если существует поезд 31, двигающийся по пути 34 по направлению к месту назначения, и за ним нет следующего поезда, поезд не имеет фиксированного предельного срока прибытия, чтобы его придерживаться, компонент-локатор, включающий в себя, но не ограниченный ярлыками оборудования радиочастотной автоматической идентификации (RF AEI), диспетчерской связью, и/или видеоопределением, может быть использован для проверки точного местоположения поезда 31. Более того, входы от этих систем сигнализации могут быть использованы для корректировки скорости поезда. Используя расположенную на борту базу данных пути, рассматриваемую ниже, и компонент-локатор, такой как GPS, настоящее изобретение может корректировать интерфейс машиниста для отражения состояния системы сигнализации в заданном местоположении локомотива. В ситуации, когда состояния сигналов будут обозначать запрещающие скорости впереди, планировщик может избрать замедление поезда для сбережения потребления топлива.
Информация от компонента-локатора 30 может также использоваться для изменения целей планирования как функция расстояния до места назначения. Например, вследствие неизбежных неопределенностей о заторе на пути "более быстрые" временные цели на начальной части пути могут быть использованы как страховка против задержек, которые статистически возникают позднее. Если на определенном рейсе происходит то, что задержки не возникают, цели на более поздней части поездки могут быть изменены для использования свойственного времени простоя, которое было заложено ранее, и таким образом восстановить некоторую эффективность топлива. Сходная стратегия может быть осуществлена по отношению к ограничивающим выбросам, например, при приближении к жилой зоне.
В качестве примера стратегии ограничения, если поезд запланирован из Нью-Йорка в Чикаго, система может иметь вариант более медленной эксплуатации поезда в начале пути или в середине пути или в конце пути. Настоящее изобретение может оптимизировать план рейса для предоставления возможности более медленного функционирования в конце рейса из-за неизвестных причин, таких как, но не ограничиваясь перечисленным, погодные условия, обслуживание путей и т.д., которые могут возникать и становиться известными во время рейса. В качестве другого варианта осуществления, если известны традиционно перегруженные области, план разрабатывается с таким вариантом, чтобы иметь большую гибкость около этих традиционно перегруженных зон. Таким образом, настоящее изобретение может также принимать во внимание весовой коэффициент/штраф как функцию от времени/расстояния в будущем и/или на основе известного/прошлого опыта. Специалист в данной области техники легко признает, что такие планирования и перепланирования для принятия во внимание погодных условий, состояния пути, других поездов на пути и т.д. могут быть приняты во внимание в любое время во время рейса, где план рейса корректируется соответствующим образом.
Фиг. 3 дополнительно раскрывает другие элементы, которые могут быть частью настоящего изобретения. Предусмотрен узел 44 обработки, который действует для получения информации от компонента-локатора 30, описывающего путь компонента 33, и датчиков 38. Алгоритм 46 функционирует в рамках узла 44 обработки. Алгоритм 46 используется для вычисления оптимизированного плана рейса на основе параметров, затрагивающих локомотив 42, поезд 31, путь 34 и цели выполняемой задачи, как описано выше. В примерном варианте осуществления план рейса принят на основе моделей поведения поезда с движением поезда 31 по пути 34 как решение нелинейных дифференциальных уравнений, выведенных из физики с помощью упрощающих допущений, которые представлены в алгоритме. Алгоритм 46 имеет доступ к информации от компонента-локатора 30, описывающего путь компонента 33 и/или датчиков 38, для создания плана рейса, минимизирующего потребление топлива локомотивного состава 42, минимизирующего выбросы локомотивного состава 42, создающего требуемое время рейса и/или обеспечивающего надлежащее время работы бригады на борту локомотивного состава 42. В примерном варианте осуществления предусмотрен водитель, или контролирующий элемент 51. Как рассматривалось в данном документе, контролирующий элемент 51 используется для управления поездом, когда он следует плану рейса. В примерном варианте осуществления, рассмотренном затем в данном документе, контролирующий элемент 51 автономно создает решения для функционирования поезда. В другом примерном варианте осуществления, машинист может быть затронут для направления поезда для следования плану рейса.
Требованием настоящего изобретения является возможность первоначально создавать и быстро модифицировать на лету любой план, который выполняется. Это включает в себя создание первоначального плана, когда затрагивается большое расстояние, вследствие сложности алгоритма оптимизации плана. Когда общая длина профиля пути превышает заданное расстояние, алгоритм 46 может быть использован для деления выполняемой задачи на сегменты, где выполняемая задача может быть разделена посредством точек пути. Хотя рассматривается только единственный алгоритм 46, специалист в данной области техники без труда признает, что более одного алгоритма может быть использовано, где алгоритмы могут быть соединены вместе. Точка пути может включать в себя естественные местоположения, где поезд 31 останавливается, такие как, но не ограниченные подъездными путями, где встреча с встречным транспортным движением, или разъездом с поездом позади текущего поезда, запланированным для появления на однопутной железной дороге, или ветки станции, или предприятием, где вагоны должны быть подцеплены или отцеплены, и местоположения планируемого функционирования. На таких точках пути от поезда 31 может потребоваться быть в данном местоположении в запланированное время и быть остановленным или двигаться со скоростью в установленном диапазоне. Продолжительность времени от прибытия до отправления в точках пути называется временем пребывания.
В примерном варианте осуществления настоящее изобретение способно разбивать более длинный рейс на меньшие сегменты особенным систематическим способом. Каждый сегмент может быть несколько произвольным по длине, но типично подбираются на естественных местоположениях, таких как остановка или особенное ограничение скорости, или на ключевых мильных столбах, которые определяют соединения с другими путями. При заданном разбиении, или сегменте, выбранном данным способом, профиль управления создается для каждого сегмента пути как функция времени пути, взятого в качестве независимой переменной, так как показано на фигуре 4. Соотношение использованного топлива/времени перемещения, ассоциированное с каждым сегментом, может быть вычислено до того, как поезд 31 достигает этот сегмент пути. Общий план пути может быть создан из профилей управления, созданных для каждого сегмента. Изобретение распределяет время пути между всеми сегментами рейса оптимальным способом, так что удовлетворяется общее требуемое время перемещения, и общее потребленное топливо по всем сегментам является наименьшим из возможного. Примерный 3-сегментный рейс раскрыт на фиг. 6 и рассматривается ниже. Тем не менее, специалист в данной области техники признает, по рассматриваемым сегментам, что план рейса может содержать единственный сегмент, представляющий полный рейс.
Фиг. 4 изображает примерный вариант осуществления кривой использованного топлива/времени перемещения. Как было упомянуто ранее, такая кривая 50 создается, когда рассчитывается профиль оптимального рейса для различных времен пути для каждого сегмента. То есть, для заданного времени 49 пути, использованного топлива 53 существует результат детализированного профиля управления, рассчитанного, как описано выше. Как только времена перемещений для каждого сегмента распределены, план мощности/скорости определяется для каждого сегмента из ранее вычисленных решений. Если присутствуют какие-нибудь путевые ограничения на скорость между сегментами, такие как, но не ограниченные, изменением в пределе скорости, они согласовываются во время создания профиля оптимального рейса. Если ограничения скорости изменяются только в одном сегменте, кривая 50 использования топлива/времени пути должна быть пересчитана только для измененного сегмента. Это уменьшает время от необходимости пересчета большего количества частей, или сегментов, рейса. Если локомотивный состав или поезд существенно изменяется по пути, например из-за потери локомотива или подбора или отцепления вагонов, то профили управления для всех последующих сегментов должны быть пересчитаны, создавая новые экземпляры кривой 50. Эти новые кривые 50 затем будут использованы наряду с новыми целями графика для планирования оставшегося рейса.
Как только план рейса создан, как рассмотрено выше, траектория скорости и мощности в зависимости от расстояния используется для достижения места назначения с минимальным топливом и/или выбросами при требуемом времени рейса. Существует несколько способов, которыми можно выполнять план рейса. Как представлено ниже с большей подробностью, в одном примерном варианте осуществления, режим инструктирования настоящего изобретения отображает информацию машинисту, чтобы машинист следовал ей для достижения требуемой мощности и скорости, определенной согласно оптимальному плану рейса. В этом режиме информацией о функционировании являются предлагаемые условия функционирования, которые должен использовать машинист. В другом примерном варианте осуществления, ускорение и поддержание постоянной скорости выполняется настоящим изобретением. Тем не менее, когда поезд 31 должен быть замедлен, машинист несет ответственность за применение системы 52 торможения. В другом примерном варианте осуществления, настоящее изобретение командует мощностью и торможением, как это требуется для следования требуемому пути скорости-расстояния.
Используется управление с помощью обратной связи для предоставления корректировок последовательности управления мощностью в профиле для корректировки из-за таких событий, как но не ограниченных, колебаниями загрузки поезда, вызванных колебаниями встречного ветра и попутного ветра. Другая подобная ошибка может быть вызвана ошибкой в параметрах поезда, таких как, но не ограниченных, массой поезда и/или лобовым сопротивлением, в сравнении с допущениями в оптимизированном плане рейса. Третий тип ошибок может возникать в связи с информацией, содержащейся в базе 36 данных пути. Другая возможная ошибка может затрагивать немоделируемые отличия в характеристиках функционирования из-за двигателя локомотива, снижение величины нагрузки с ростом температуры тягового двигателя и/или другими факторами. Стратегии управления обратной связи сравнивают фактическую скорость как функцию от положения со скоростью в требуемом оптимальном профиле. На основе этой разницы добавляется корректировка к профилю оптимальной мощности для направления фактической скорости навстречу оптимальному профилю. Для обеспечения стабильной регулировки может быть предусмотрен алгоритм компенсации, который фильтрует силы обратной связи в корректировки мощности для обеспечения того, что устойчивость замкнутой эффективности гарантирована. Компенсация может включать в себя стандартную динамическую компенсацию, как та, что используется специалистами в области техники разработки систем управления для удовлетворения целям эффективности.
Настоящее изобретение предоставляет простейшие и поэтому наиболее быстрые средства для приспособления к изменениям в целях рейса, которые скорее являются правилом, а не исключением в железнодорожной деятельности. В примерном варианте осуществления для определения оптимального по топливу рейса из пункта A в пункт B, где существуют остановки на пути, и для обновления рейса для остатка рейса, как только рейс был начат, метод квазиоптимального разложения удобен для нахождения профиля оптимального рейса. Используя методы моделирования, способ вычисления может найти план рейса с заданным временем перемещения и начальной и конечной скоростью, с тем чтобы удовлетворить все ограничения скорости и ограничения возможностей локомотива, если существуют остановки. Хотя последующее рассмотрение направлено в отношении к оптимизации использования топлива, оно также может быть применено к оптимизации других факторов, таких как, но не ограниченных выбросами, графиком, комфортом бригады и влиянием нагрузки. Способ может быть использован в начале разработки плана рейса, а что более важно - к адаптации к изменениям в целях после начала рейса.
Как рассматривается в данном документе, настоящее изобретение может использовать настройку, как проиллюстрировано в примерной схеме последовательности операций, изображенной на фиг. 5, и как примерный 3-сегментный пример, подробно изображенный на фиг. 6. Как проиллюстрировано, рейс может быть разбит на два или более сегментов, T1, T2 и T3. Хотя, как обсуждалось в данном документе, возможно рассматривать рейс как единственный сегмент. Как рассматривается в данном документе, границы сегмента могут не иметь в качестве результата равные сегменты. Вместо этого сегменты являются естественными или зависящими от выполняемой задачи границами. Планы оптимального рейса предварительно вычисляются для каждого сегмента. Если использование топлива в зависимости от времени перемещения является целью рейса, которой нужно удовлетворить, кривые топлива в зависимости от времени рейса строятся для каждого сегмента. Как рассматривается в данном документе, кривые могут быть основаны на других факторах, где факторы являются целями, которые должны быть удовлетворены планом рейса. Когда время рейса является определяемым параметром, время рейса для каждого сегмента вычисляется, в то же время удовлетворяя общие временные ограничения времени рейса. Фиг. 6 иллюстрирует пределы скорости для примерного 3-сегментного 200-мильного рейса 97. Дополнительно проиллюстрированы изменения уклона вдоль 200-мильного рейса 98. Также показана комбинированная диаграмма 99, иллюстрирующая кривые для каждого сегмента рейса использованного топлива в зависимости от времени перемещения.
Используя установку оптимального управления, описанную ранее, настоящий способ вычисления может найти план рейса с заданным временем перемещения и начальной и конечной скорости, с тем чтобы удовлетворить все ограничения скорости и ограничения возможностей локомотива, если существуют остановки.
Хотя последующее подробное рассмотрение направлено в отношении к оптимизации использования топлива, оно также может быть применено к оптимизации других факторов, как рассмотрено в данном документе, таких как, но не ограниченных выбросами. Ключевой гибкостью является приспособление требуемого времени пребывания на стоянках, и для принятия во внимание ограничений на самое раннее прибытие и отправление в местоположении, как может потребоваться, например, в однопутных операциях, где время для прибытия или проезда по подъездному пути является критичным.
Настоящее изобретение находит оптимальный по топливу рейс для расстояний от D0 до DM, проходимых за время T с M-l промежуточными остановками D1,...,DM-1 и со временами прибытия и отправления на этих остановках, ограниченных посредством

где tarr(Di), tdep(Di) и ∆ti - времена прибытия, отправления и минимальное время стоянки на i-й остановке. Предполагая, что оптимальность по топливу предполагает минимизацию времени остановки, следовательно tdep(Di) = tarr(Di)+∆ti, что устраняет второе приведенное выше неравенство. Предположим, что для каждого i=1,...,M, известен оптимальный по топливу рейс от Di-1 до Di для времени пути t Tmin(i)<t<Tmax(i). Пусть Fi(t) будет использованием топлива, соответствующим этому рейсу. Если время рейса от Dj-1 до Dj обозначено Tj, то время прибытия в Di задано
где ∆t0 определено равным нулю. Оптимальный по топливу рейс от D0 до DM для времени рейса T получается посредством нахождения Ti, i=l,...,M, которые минимизируют
при условии, что

Как только рейс находится в пути, проблемой является переопределение оптимального по топливу решения для остатка рейса (первоначально от D0 до DM за время T) во время движения по рейсу, но где нарушения мешают следованию оптимальному по топливу решению. Пусть текущее расстояние и скорость будут x и v соответственно, где Di-1 < x< Di. Также пусть текущее время с начала рейса будет tact. Когда оптимальное по топливу решение для остатка рейса от x до DM, которое сохраняет исходное время прибытия в DM, получается посредством нахождения  i, Tj, j=i+l,...M, которые минимизируют
i, Tj, j=i+l,...M, которые минимизируют
при условии, что
Здесь  i(t,x,v) является использованным топливом оптимального рейса от x до Di проходимого за время t, с первоначальной скоростью в х, равной v.
i(t,x,v) является использованным топливом оптимального рейса от x до Di проходимого за время t, с первоначальной скоростью в х, равной v.
Как рассматривалось выше, примерным способом предоставления возможности более эффективного перепланирования является построение оптимального решения для рейса от остановки до остановки из отдельных сегментов. Для рейса от Di-1 до Di, со временем движения Ti, выберем набор промежуточных точек
Dij, j=1,...,Ni-1. Пусть Di0=Di-1 и  =Di. Затем выразим использование топлива для оптимального рейса от Di-1 до Di как
=Di. Затем выразим использование топлива для оптимального рейса от Di-1 до Di как
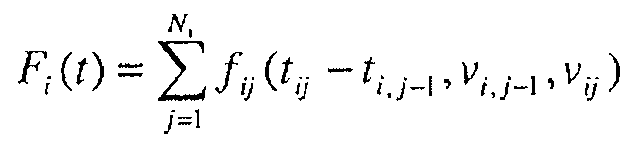
где fij(t,vi,j-1,vij) использование топлива для оптимального рейса от Di,j-1 до Dij, проходимого за время t, с первоначальной и конечной скоростями vi,j-1 и vij. Более того, tij равняется времени в оптимальном рейсе, соответствующему расстоянию Dij. По определению tiN-ti0=Ti. Поскольку поезд остановлен в Di0 и DiN, vi0= =0.
=0.
Вышеприведенное выражение дает возможность функции Fi(t) быть альтернативно определенной сначала определением функции fij(·), 1≤j≤Ni, затем нахождением τij, 1≤j≤Ni и vij,1≤j≤Ni, которые минимизируют
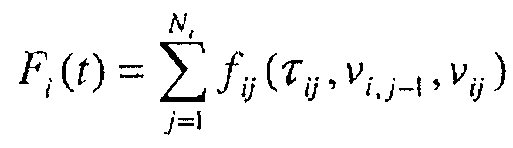
при условии, что
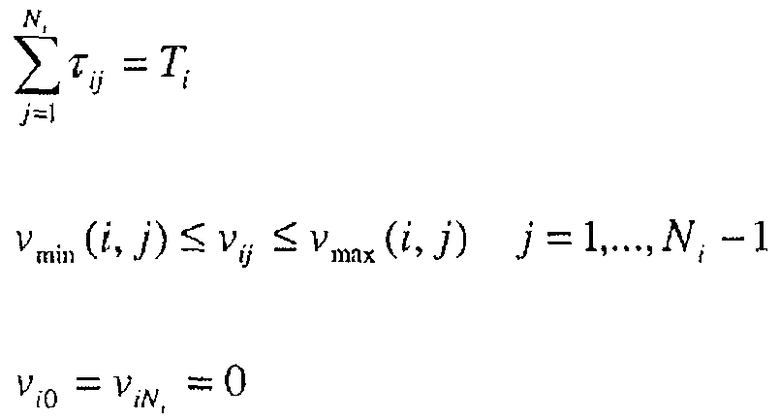
Выбирая Dij (например, при ограничениях скорости или точках встречи), vmax(i, j)-vmin(i, j) может быть минимизировано, таким образом минимизируя область определения, на которой fij() должен быть известен.
На основе вышеприведенного разделения, более простым квазиоптимальным подходом к перепланированию, чем тот, что описан выше, является ограничение перепланирования временами, когда поезд находится в точках Dij, 1≤i≤M, 1≤j≤Ni. В точке Dij новый оптимальный рейс из Dij в DM может быть определен нахождением τik, j<k≤Ni, vik, j<k<Ni и τmn, i<m≤M, 1≤n≤Nm, vmn, i<m≤M, 1≤n≤<Nm, которые минимизируют

при условии, что
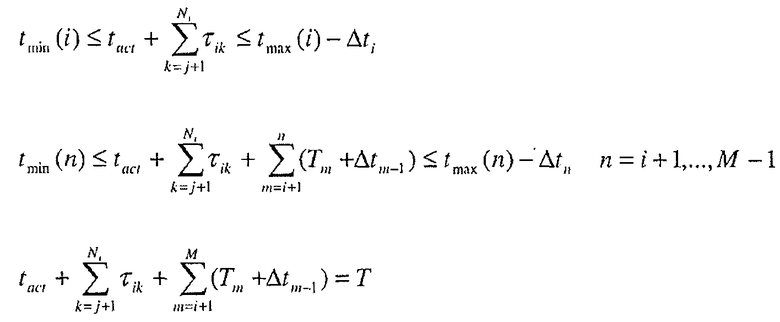
где
Дальнейшее упрощение получается в результате пересчета Tm, i<m≤M до тех пор, пока достигается точка дистанции Di. Таким способом в точках Dij между Di-1 и Di минимизацию вышеописанного требуется выполнять в τik, j<k≤Ni, vik, j<k<Ni. Ti увеличено, как требуется для приспособления к любому более длительному времени движения от Di-1 до Dij, чем планировалось. Это увеличение позже компенсируется, если возможно, перерасчетом Tm, i<m≤M в точке дистанции Di.
По отношению к конфигурации замкнутого цикла, раскрытой выше, общая входная энергия, требуемая для перемещения поезда 31 из пункта A в пункт B, состоит из суммы четырех компонентов, а именно разницы в кинетической энергии между точками A и B; разницы в потенциальной энергии между точками A и B; потери энергии вследствие трения и других потерь сопротивления; и энергии, рассеянной применением тормозов. Принимая стартовую и конечную скорости равными (например, неизменными), первый компонент равен нулю.
Более того, второй компонент не зависим от стратегии управления. Таким образом этого хватает для минимизации суммы последних двух компонентов.
Следование профилю постоянной скорости минимизирует потерю на лобовое сопротивление. Следование профилю постоянной скорости также минимизирует общую потребляемую энергию, когда торможение не требуется для поддержания постоянной скорости. Тем не менее, если торможение требуется для поддержания постоянной скорости, применение торможения только для поддержания постоянной скорости наиболее вероятно будет увеличивать общую требуемую энергию из-за требования пополнения энергии, рассеянной тормозами. Существует возможность, что некоторые торможения могут фактически уменьшать общее использование энергии, дополнительная потеря тормозов является более, чем компенсация суммарного уменьшения в потерях на лобовое сопротивление, вызванное торможением, посредством уменьшения колебания скорости.
После выполнения перепланирования по причине набора событий, описанных выше, новый оптимальный план предельной скорости может быть соблюдаем с использованием управления замкнутого цикла, описанного в данном документе. Тем не менее, в некоторых ситуациях может не быть достаточно времени для выполнения разбитого на сегменты планирования, описанного выше, и практически когда существуют ограничения критической скорости, которые должны быть признаваемы, требуется альтернатива. Настоящее изобретение выполняет это с помощью алгоритма, упоминаемого как "интеллектуальный круиз-контроль". Алгоритм интеллектуального круиз-контроля является эффективным способом для генерации на лету энергетически эффективного (поэтому топливно эффективного) квазиоптимального указания для управления поездом 31 по известной территории. Этот алгоритм допускает знание позиции поезда 31 по пути 34 все время, так же как и знание уклона и кривизны пути в зависимости от позиции. Способ полагается на модель точечной массы для движения поезда 31, чьи параметры могут быть адаптивно оценены из оперативных измерений движения поезда, как описано ранее.
Алгоритм интеллектуального круиз-контроля имеет три принципиальных компонента, в особенности модифицированный профиль ограничения скорости, который служит в качестве энергетически эффективного руководства около ограничений предела скорости; профиль параметров идеального положения рукоятки регулятора скорости или динамического тормоза, который пытается балансировать между минимизацией колебания скорости и торможения; и механизм для комбинирования последних двух компонентов для создания команды отметки, использующей цикл обратной связи по скорости для компенсации несоответствий моделируемых параметров при сравнении с реальными параметрами. Интеллектуальный круиз-контроль может вмещать стратегии в настоящем изобретении, которые не делают активных торможений (т.е. водитель уведомляется и предполагается обеспечивающим необходимое торможение) или вариант, который делает активное торможение.
По отношению к алгоритму круиз-контроля, который не контролирует динамическое торможение, три примерных компонента являются модифицированными профилями пределов скорости, которые служат в качестве энергетически эффективного руководства возле ограничений предела скорости, сигнал уведомления, направляемый для уведомления машиниста, когда торможение должно быть применено, идеальный профиль положения рукоятки регулятора скорости, который пытается балансировать между минимизированными колебаниями скорости, и уведомление машиниста о применении торможения, механизм, затрагивающий цепь обратной связи для компенсации несоответствий модельных параметров и реальных параметров.
Также в настоящее изобретение включен подход для идентификации значений ключевых параметров поезда 31. Например, что касается оценки массы поезда, фильтр Калмана и рекурсивное приближение наименьших квадратов могут быть использованы для определения ошибок, которые могут развиться в превышение времени.
Фиг. 7 изображает примерную схему последовательности операций настоящего изобретения. Как рассматривалось ранее, удаленное средство обслуживания, такое как диспетчерская служба 60, может предоставлять информацию для настоящего изобретения. Как проиллюстрировано, такая информация предоставлена для исполняющего управляющего элемента 62. Также поставляемой к исполняющему управляющему элементу 62 является база 63 данных информации моделирования локомотива, информация от базы 36 данных, такая как, но не ограниченная информацией уклона дороги, и информацией предела скорости, оценочные параметры поезда, такие как, но не ограниченные весом поезда и коэффициентами лобового сопротивления, и таблицы расхода топлива от блока 64 оценки расхода топлива. Исполняющий управляющий элемент 62 поставляет информацию на планировщик 12, который подробно раскрыт на фиг. 1. Как только план рейса вычислен, план подается на элемент 51 консультанта по управлению, управления или контроля. План рейса также подается на исполняющий управляющий элемент 62 так, что он может сравнивать рейс, когда предоставлены другие новые данные.
Как рассмотрено выше, консультант 51 по управлению может автоматически устанавливать отметку мощности, предустановленный параметр отметки или оптимальную непрерывную отметку мощности. В дополнение к подаче команды скорости на локомотив 31, предоставлено отображающее устройство 68 таким образом, что машинист может просматривать, что порекомендовал планировщик. Машинист также имеет доступ к панели 69 управления. Через панель 69 управления машинист может решать, применять ли рекомендованную отметку мощности. С этой стороны, машинист может ограничить целевую или рекомендованную скорость. То есть, в любой момент машинист всегда имеет окончательное полномочие в том, с каким установочным параметром мощности локомотивный состав будет функционировать. Это включает решение, применять ли торможение, если план рейса рекомендует замедление поезда 31. Например, при функционировании на неосвещенной территории, или где информация от путевого оборудования не может в электронном виде передать информацию поезду, и вместо этого машинист просматривает визуальные сигналы от путевого оборудования, машинист вводит команды на основе информации, содержащейся в базе данных пути и сигналов от путевого оборудования. На основе того, как функционирует поезд 31, информация, относящаяся к управлению топливом, подается на блок 64 оценки расхода топлива. Поскольку прямое измерение течения топлива обычно недоступно в локомотивном составе, вся информация о потребленном топливе до сих пор в рамках рейса и планирование на будущее, следуя оптимальным планам, выполняется с использованием откалиброванных физических моделей, таких как те, что используются в разработке оптимальных планов. Например, такие прогнозы могут включать в себя, но не ограничены использованием измеренной полной мощности в л.с. и известных топливных характеристик для выведения общего использованного топлива.
Поезд 31 также имеет устройство-локатор 30, такое как датчик GPS, как рассмотрено выше. Информация подается на блок 65 оценки параметров поезда. Такая информация может включать в себя, но не ограничивается данными датчика GPS, данными силы тяги/торможения, данными статуса торможения, скоростью и любыми изменениями в данных скорости. С информацией, относящейся к уклону и информации предела скорости, на исполняющий управляющий элемент 62 подается информация о весе поезда и коэффициенте лобового сопротивления.
Настоящее изобретение может также предоставлять возможность использования непрерывно изменяющейся мощности по всему оптимизационному планированию и реализации управления замкнутого цикла. В традиционном локомотиве мощность типично квантуется на восемь дискретных уровней. Современные локомотивы могут реализовать непрерывное изменение мощности в л.с., которое может быть включено в ранее описанные способы оптимизации. С непрерывной мощностью локомотив 42 может дополнительно оптимизировать условия функционирования, например посредством минимизации вспомогательных нагрузок и потерь при передаче мощности, и тонкой настройки мощности двигателя в л.с. областей оптимальной эффективности, или точек увеличенных нижних пределов выбросов. Примеры включают в себя, но не ограничены, минимизацию потерь системы охлаждения, корректировку напряжений генератора переменного тока, корректировку скоростей двигателя и уменьшение количества приводимых осей. Более того, локомотив 42 может использовать расположенную на борту базу 36 данных пути и прогнозируемые требования к характеристикам функционирования для минимизации вспомогательных нагрузок и потерь при передаче мощности для обеспечения оптимальной эффективности для целевого потребления топлива/выбросов. Примеры включают в себя, но не ограничены уменьшением количества приводимых осей на ровной территории и предварительным охлаждением двигателя локомотива до входа в тоннель.
Настоящее изобретение может также использовать расположенную на борту базу 36 данных пути и прогнозируемые характеристики функционирования для корректировки характеристик функционирования локомотива, таких как обеспечение, что поезд имеет существенную скорость, когда он приближается к холму и/или тоннелю. Например, это может быть выражено как ограничение скорости на определенном расположении, которое становится частью создания оптимального плана, созданного для решения уравнения (OP). Дополнительно, настоящее изобретение может включать в себя правила управления поездом, такие как, но не ограниченные, скорости отслеживания силы тяги, скорости отслеживания максимальной силы торможения. Это может быть включено прямо в формулировку для профиля оптимального рейса или в качестве альтернативы включено в регулятор замкнутого цикла, используемый для управления приложения мощности для достижения целевой скорости.
В предпочтительном варианте осуществления настоящее изобретение установлено на головном локомотиве состава поезда. Даже хотя настоящее изобретение не зависит от данных или взаимодействий с другими локомотивами, оно может быть интегрировано с функциональностью администратора состава, как раскрыто в патенте США № 6691957 и патентной заявке № 10/429596 (принадлежащие Правопреемнику и обе включенные в материалы настоящей заявки посредством ссылки), и/или функциональностью оптимизатора состава для улучшения эффективности. Взаимодействие с различными поездами не воспрепятствовано, как проиллюстрировано примером диспетчерского рассуждения для двух "независимо оптимизированных" поездов, описанных в данном документе.
Поезда с распределенными энергосистемами могут управляться в разных режимах. Одним режимом является тот, где все локомотивы в поезде функционируют с одной командой отметки. Так что если головной локомотив подает команду вращения двигателя - N8, всем членам поезда будет скомандовано создать мощность вращения двигателя - N8. Другой режим функционирования - "независимое" управление. В этом режиме локомотивы или наборы локомотивов, распределенные по поезду, могут управляться при различных мощностях вращения двигателя или торможения. Например, во время того, как поезд достигает вершины горы, головные локомотивы (на направленном вниз склоне горы) могут быть помещены в состояние торможения, в то время как локомотивы в середине или в конце поезда (на направленном вверх склоне горы) могут быть в состоянии вращения двигателя. Это делается для минимизации растягивающих сил на механических сцепках, которые соединяют вагоны и локомотивы. Традиционно, управление системой распределенной мощности в "независимом" режиме требует от машиниста вручную выдать команду каждому удаленному локомотиву или набору локомотивов через устройство отображения на головном локомотиве, используя модель планирования, основанную на физике, информацию установок поезда, расположенную на борту базу данных пути, правила работы на борту, систему определения местоположения, замкнутый цикл реального времени управления мощностью/торможением и ответную реакцию датчика, система будет автоматически управлять распределенной энергосистемой в "независимом" режиме.
Во время управления при распределенной мощности машинист в головном локомотиве может управлять параметрами функционирования удаленных локомотивов в удаленных составах с помощью системы управления, такой как компонент управления распределенной мощностью. Таким образом, при функционировании с распределенной мощностью машинист может выдавать команды каждому локомотивному составу функционировать на разных уровнях отметки мощности (или один состав может быть в состоянии вращения двигателя, а другой - в состоянии торможения), где каждый отдельный локомотив в локомотивном составе функционирует на одной отметке мощности. В примерном варианте осуществления, при настоящем изобретении, установленном на поезде, предпочтительно находящемся на связи с компонентом управления распределенной мощностью, когда требуется уровень отметки мощности для удаленного локомотивного состава, как рекомендованный планом оптимизированного рейса, настоящее изобретение будет передавать этот установочный параметр мощности на удаленные локомотивные составы для реализации. Как рассматривается ниже, то же самое справедливо по отношению к торможению.
Настоящее изобретение может быть использовано вместе с составами, в которых локомотивы не являются соприкасающимися, например с одним и более локомотивами впереди, другими посередине и позади поезда. Такие конфигурации называются распределенной мощностью, где стандартное соединение между локомотивами заменено радиосвязью или вспомогательным кабелем для соединения локомотивов наружным образом. Во время управления при распределенной мощности машинист в головном локомотиве может управлять параметрами функционирования удаленных локомотивов в составах с помощью системы управления, такой как компонент управления распределенной мощностью. В частности, при функционировании с распределенной мощностью машинист может выдавать команды каждому локомотивному составу функционировать на разных уровнях отметки мощности (или один состав может быть в состоянии вращения двигателя, а другой - в состоянии торможения), где каждый отдельный представитель в локомотивном составе функционирует на одинаковой отметке мощности.
В примерном варианте осуществления, при настоящем изобретении, установленном на поезде, предпочтительно находящемся на связи с распределенным компонентом управления мощностью, когда требуется уровень отметки мощности для удаленного локомотивного состава, как рекомендованный планом оптимизированного рейса, настоящее изобретение будет передавать этот установочный параметр мощности на удаленные локомотивные составы для реализации. Как рассматривается ниже, то же самое справедливо по отношению к торможению. При оптимизации при распределенной мощности предварительно описанная задача оптимизации может быть улучшена для позволения дополнительных уровней свободы, в которых каждый из удаленных элементов может быть независимо управляем из головного элемента. Значением этого являются дополнительные цели или ограничения, относящиеся к действующим внутри поезда силам, которые могут быть включены в функцию характеристик функционирования, допуская, что также включена модель для отображения действующих внутри поезда сил. Таким образом, настоящее изобретение может включать в себя использование нескольких элементов управления скоростью для лучшего управления действующими внутри поезда силами, так же, как потребление топлива и выбросы.
В поезде, использующем администратор состава, головной локомотив в локомотивном составе может функционировать при отличных установочных параметрах отметки мощности от других локомотивов в данном составе. Другие локомотивы в составе функционируют на одинаковом установочном параметре отметки мощности. Настоящее изобретение может быть использовано в соединении с администратором состава для выдачи команды установочных параметров отметки мощности для локомотивов в составе. Таким образом, на основе настоящего изобретения, поскольку администратор состава разделяет локомотивный состав на две группы, головной локомотив и рельсовые части, головной локомотив будет получать команды для функционирования при определенной отметке мощности, а хвостовые локомотивы будут управляться для функционирования при другой определенной отметке мощности. В примерном варианте осуществления компонент управления распределенной мощностью может быть системой и/или устройством, где размещена эта функциональность.
Более того, когда оптимизатор состава используется с локомотивным составом, настоящее изобретение может быть использовано совместно с оптимизатором состава для определения отметки мощности для каждого локомотива в локомотивном составе. Например, предположим, что план рейса рекомендует установочный параметр отметки мощности, равный 4, для локомотивного состава. На основе расположения поезда оптимизатор состава возьмет эту информацию и затем определит установочный параметр отметки мощности для каждого локомотива в составе. В данной реализации, улучшается эффективность установки параметра отметки мощности по каналам связи внутри поезда. Более того, как рассматривалось выше, реализация этой конфигурации может быть выполнена с использованием распределенной системы управления.
Более того, как рассматривалось раньше, настоящее изобретение может быть использовано для непрерывных корректировок и перепланирования касательно того, когда состав поезда использует торможение на основе наступающих интересующих событий, таких как, но не ограниченных железнодорожными переездами, изменениями уклона, приближению к подъездным путям, приближению к депо и приближению к заправочным станциям, где каждый локомотив в составе может требовать различных вариантов торможения. Например, если поезд проходит по холму, головному локомотиву может понадобиться перейти в состояние торможения, тогда как удаленным локомотивам, еще не достигшим вершины холма, может понадобиться оставаться в состоянии функционирования в двигательном режиме.
Фиг. 8, 9 и 10 изображают примерные изображения динамического устройства отображения для использования машинистом. Как представлено, фиг. 8 предусмотрен профиль рейса 72. В рамках профиля предусмотрено местоположение 73 локомотива. Предусмотрена такая информация, как длина 105 поезда и 106 количество вагонов в поезде. Также предусмотрены элементы, относящиеся к уклону 107 пути, изгибу и путевым элементам 108, включающие в себя расположение 109 мостов и скорость 110 поезда. Устройство 68 отображения позволяет оператору просматривать такую информацию и также видеть, где поезд находится по пути. Предусмотрена информация, относящаяся к расстоянию, и/или оценочное время прибытия к таким местоположениям, как переезды 112, сигнальные устройства 114, изменение скорости 116, ориентиры 118, и пункты 120 назначения. Также предусмотрен инструмент 125 управления временем прибытия для предоставления возможности пользователю определять экономию топлива, которая выполнена во время рейса. Машинист имеет возможность изменять время 127 прибытия и видеть, как это влияет на сбережение топлива. Как рассмотрено в данном документе, специалист в данной области техники признает, что экономия топлива является типичным примером только одной цели, которая может быть проверяема с помощью инструмента управления. С этой стороны, в зависимости от проверяемого параметра, другие параметры, рассматриваемые здесь, могут быть проверяемы и оцениваемы с помощью инструмента управления, который видим машинисту. Машинист также обеспечен информацией о том, как долго бригада управляет поездом. В примерных вариантах осуществления информация о времени и расстоянии может быть проиллюстрирована как время и/или расстояние до определенного события и/или местоположения или может представлять общее истекшее время.
Как продемонстрировано на фиг. 9, примерное устройство отображения предоставляет информацию о данных 130 состава, графику 132 событий и ситуации, инструмент 134 управления временем прибытия, клавиши 136 действия. Сходная информация, как рассмотрено выше, также предусмотрена на этом устройстве отображения. Это устройство 68 отображения предоставляет кнопки 138 действия для предоставления возможности машинисту перепланировать, также как и выключить 140 настоящее изобретение.
Фиг. 10 изображает другой примерный вариант осуществления устройства отображения. Видимы данные, типичные для современного локомотива, включающие в себя состояние 72 пневматического тормоза, аналоговый спидометр с цифровой вставкой 74 и информацию о силе тяги в фунтовой силе (или силовых амперах в локомотивах постоянного тока). Предусмотрен индикатор 74 для показа текущей оптимальной скорости в плане, который выполняется, так же, как и график акселерометра для дополнения считывания в милях в час/минуту. Важные новые данные для выполнения оптимального плана находятся в центре экрана, включающем в себя график 76 в виде разворачивающейся полосы с оптимальной скоростью и установочным параметром отметки в зависимости от расстояния, сравниваемой с текущей историей этих переменных. В этом примерном варианте осуществления, местоположение поезда выводится, используя компонент-локатор. Как проиллюстрировано, местоположение предоставляется посредством идентификации, как далеко находится поезд от его финального пункта назначения, абсолютное положение, первоначальное место назначения, промежуточная точка, и/или ввод машиниста.
Полосовая диаграмма предоставляет опережающий просмотр на изменения в скорости, требуемой для следования оптимальному плану, который полезен в ручном управлении, и контролирует план в зависимости от фактического во время автоматического управления. Как было рассмотрено в данном документе, так как и в режиме тренировки, машинист может либо следовать рекомендованной отметке или скорости, предлагаемой настоящим изобретением. Вертикальная полоса дает график требуемого и фактического уровня отметки, который также отображается цифровым способом ниже полосовой диаграммы. Когда используется непрерывный параметр отметки мощности, как рассмотрено ниже, устройство отображения будет просто округлено до наиболее близкого дискретного эквивалента, устройство отображения может быть аналоговым устройством отображения, так что отображается аналоговый эквивалент или процентное отношение или фактическая мощность в л.с./сила тяги.
Критическая информация о состоянии пути отображается на экране и показывает текущий угол наклона, поезда, обозначенного номером 88, либо ведущего локомотива, расположения вдоль поезда или среднего по длине поезда. Пройденное расстояние до сих пор в плане 90, совокупное использованное топливо 92, где или планируется расстояние вне следующей остановки 94, текущее и проектное время 96 прибытия, время, прибытия на следующую остановку также раскрываются. Устройство 68 отображения также показывает максимально возможное время до назначения, возможного при наличии вычисленных планов. Если требуется более позднее прибытие, может быть выполнено перепланирование. Дельта-данные плана показывают статус для топлива и графика впереди или позади текущего оптимального плана. Отрицательные числа обозначают больше топлива или поздно сравненное с планом, и типично компромисс в противоположных направлениях (замедление поезда для сохранения топлива задерживает поезд, и наоборот).
Все время эти устройства 68 отображения дают машинисту моментальный снимок того, где он стоит по отношению к в настоящее время установленному плану управления. Устройство отображения служит только для цели иллюстрации, так как существует много разных способов отображения/передачи этой информации оператору и/или диспетчеру. С этой стороны, раскрытая выше информация может быть смешана для предоставления отображения, отличного от раскрытого.
Другие свойства, которые могут быть включены в настоящее изобретение, включают в себя, но не ограничены, предоставлением возможности создания журналов регистрации данных и отчетов. Эта информация может сохраняться на поезде и выгружаться во внебортовую систему в некоторый момент времени. Выгрузка может происходить с помощью мануальной и/или беспроводной передачи. Эта информация может также быть просматриваема машинистом с помощью дисплея локомотива. Данные могут включать в себя такую информацию, как, но не ограниченную вводом машиниста, время функционирования системы, сохраненное топливо, диспропорция топлива между локомотивами в поезде, рейс поезда вне курса, проблемы системы диагностики, такие как то, что датчик GPS неисправен.
Поскольку планы рейса также должны принимать во внимание допустимое время работы бригады, настоящее изобретение может принимать такую информацию во внимание при планировании рейса. Например, если максимальное время, которое может работать бригада, равно восьми часам, то рейс должен быть оформлен так, чтобы содержать места остановки для замены новой бригадой старой бригады. Такие определенные местоположения остановки могут включать в себя, но не в ограничительном смысле, железнодорожные станции, места встречи/прохождения и т.д. Если с течением рейса время рейса может быть превышено, настоящее изобретение может быть скорректировано вручную машинистом для удовлетворения критерию, заданному машинистом. В конечном счете, вне зависимости от условий функционирования поезда, таких как, но не ограниченных высокой загрузкой, низкой скоростью, условиями эластичности команды и т.д., машинист остается в силе задавать команды и условия функционирования поезда.
Используя настоящее изобретение, поезд может функционировать во множестве режимов функционирования. В одной концепции функционирования настоящее изобретение может предоставлять команды для командования движением вперед, динамическим торможением. Машинист после этого управляет всеми остальными функциями поезда. В другой концепции функционирования настоящее изобретение может предоставлять команды для командования только движением вперед. Машинист после этого управляет динамическим торможением и всеми остальными функциями поезда. В еще одной концепции функционирования, настоящее изобретение может предоставлять команды для командования движением вперед, динамическим торможением и прикладной системой аэродинамического тормоза. Машинист после этого управляет всеми остальными функциями поезда.
Настоящее изобретение может также быть использовано посредством уведомления машиниста о наступающих событиях, представляющих интерес для действий, которые должны быть выполнены. В особенности, или могут являться логика прогнозирования настоящего изобретения, непрерывные корректировки и перепланирования для оптимизированного плана рейса, база данных пути, кроме того, машинист может быть уведомлен о наступающих пересечениях, сигналах, изменениях уклона, торможениях, подъездных путях, железнодорожных станциях, заправочных станциях и т.д. Это уведомление может происходить слышимо и/или через интерфейс машиниста.
Конкретно, используя модель планирования, основанную на физике, информацию установок поезда, расположенную на борту базу данных пути, правила работы на борту, систему определения местоположения, замкнутый цикл реального времени управления мощностью/торможением и ответную реакцию датчика, система будет представлять и/или уведомлять машиниста о требуемых действиях. Уведомление может быть визуальными или слышимым. Примеры включают в себя уведомление о переезде, которое требует от машиниста привести в действие гудок или звонок, уведомляя о тихих переездах, которые не требуют от машиниста приведения в действие гудка или звонка локомотива.
В другом примерном варианте осуществления, используя модель планирования на основе физики, рассмотренную выше, информацию установок поезда, размещенную на борту базу данных пути, правила работы на борту, систему определения местоположения, замкнутое управление реального времени мощностью/тормозом и ответную реакцию датчика, настоящее изобретение может представлять информацию машиниста, которая позволяет машинисту видеть, когда поезд прибудет в разные местоположения, как проиллюстрировано на фиг. 9. Система будет предоставлять машинисту возможность корректировать план рейса (целевое время прибытия). Эта информация (фактическое оцененное время прибытия или информация, требуемая для выведения вне борта поезда) может быть передана на диспетчерский центр для предоставления возможности диспетчеру или диспетчерской системе корректировать целевое время прибытия. Это позволяет системе быстро корректировать и оптимизировать подходящую целевую функцию (например, попеременно использовать скорость и использование топлива).
На основе предоставленной выше информации, примерные варианты осуществления изобретения могут быть использованы для определения местоположения поезда 31 на пути, этап 18. Определение характеристик пути также может быть совершено, такое как посредством использования блока 65 оценки параметров поезда. План рейса может быть создан на основе местоположения поезда, характеристик пути и условия функционирования по меньшей мере одного локомотива поезда. Более того, требования к оптимальной мощности могут быть переданы на поезд, где оператор поезда может быть проинструктирован управлять локомотивом, локомотивным составом и/или поездом в соответствии с оптимальной мощностью, например, с помощью беспроводной сети 47 связи. В другом примере вместо управления оператором поезда, поезд 31, локомотивный состав 18 и/или локомотив могут автоматически управляться на основе оптимального установочного параметра мощности.
В дополнение, способ может также затрагивать определение установочного параметра мощности, или команды 14 мощности, для локомотивного состава 18 на основе плана рейса. Локомотивный состав 18 затем управляется при установочном параметре мощности. Параметры функционирования поезда и/или локомотивного состава могут быть собраны, таким способом, как, но не ограничиваясь перечисленным, фактической скоростью поезда, фактическим установочным параметром локомотивного состава и местоположением поезда. По меньшей мере один из этих параметров может быть сравнен с установочным параметром мощности, заданным командой для локомотивного состава для его функционирования.
В другом варианте осуществления способ может затрагивать определение параметров функционирования 62 поезда и/или локомотивного состава. Требуемые параметры функционирования определяются на основе определенных параметров функционирования. Определенный параметр сравнивается с параметром функционирования, если обнаружена разница, план рейса корректируется, этап 24.
Другой вариант осуществления может повлечь за собой способ, где определяется местоположение поезда 31 на пути 34. Характеристики пути 34 также определяются. Разрабатывается или создается план рейса или план управления, для того чтобы минимизировать потребление топлива. План рейса может быть создан на основе местоположения поезда, характеристик пути и/или условия функционирования по меньшей мере одного локомотивного состава 18 и/или поезда 31. В аналогичном способе, как только местоположение поезда на пути определено и характеристики пути известны, управление силовой установкой и/или команды отметки предусмотрены для минимизации потребления топлива.
Перечень позиций
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ, СИСТЕМА И КОМПЬЮТЕРНЫЙ ПРОГРАММНЫЙ КОД ДЛЯ ОПТИМИЗАЦИИ РЕЙСА С ПОМОЩЬЮ ПОПОЛНЕНИЯ БАЗЫ ДАННЫХ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ/ПУТЕЙ | 2007 |
|
RU2469387C2 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РЕЙСА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2481988C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ ПАРАМЕТРОВ МНОЖЕСТВА ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ, ДЕЙСТВУЮЩИХ В ЖЕЛЕЗНОДОРОЖНЫХ СЕТЯХ С МНОЖЕСТВОМ ПЕРЕСЕЧЕНИЙ | 2007 |
|
RU2466049C2 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ ДВИЖЕНИЯ ПОЕЗДА | 2007 |
|
RU2501695C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ ПОЕЗДА С УЧЕТОМ ПАРАМЕТРОВ ВАГОНА | 2007 |
|
RU2605648C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ ПОЕЗДА С УЧЕТОМ ПАРАМЕТРОВ ВАГОНА | 2007 |
|
RU2470814C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ | 2019 |
|
RU2714966C1 |
| СПОСОБ И СИСТЕМА ДЛЯ УСОВЕРШЕНСТВОВАНИЯ ТЕХНИКИ ВОЖДЕНИЯ ПОЕЗДОВ И СНИЖЕНИЯ РАСХОДА ТОПЛИВА | 2006 |
|
RU2409484C2 |
| СПОСОБ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ НА ЛОКОМОТИВЕ ДЛЯ КОНТРОЛЯ ЗА ДВИЖЕНИЕМ ПОЕЗДА | 2019 |
|
RU2723513C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ И МАНЕВРОВЫХ СОСТАВОВ С ПОМОЩЬЮ ЭВМ БЕЗ ОПАСНЫХ ОТКАЗОВ | 2017 |
|
RU2673315C1 |
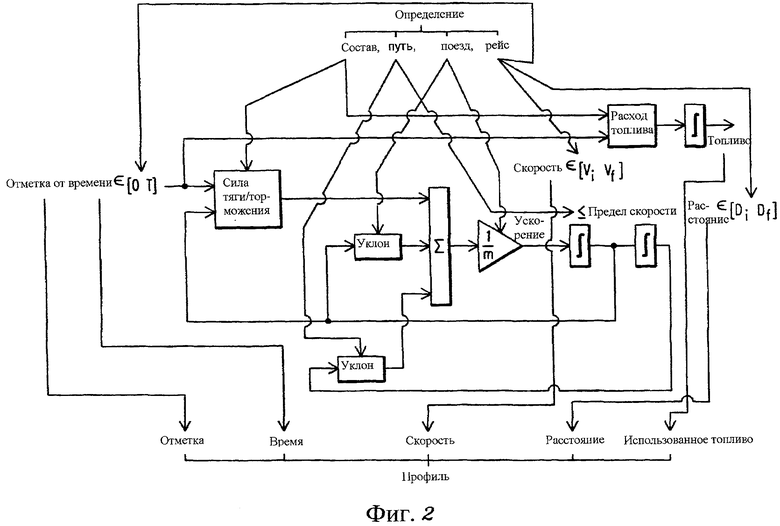
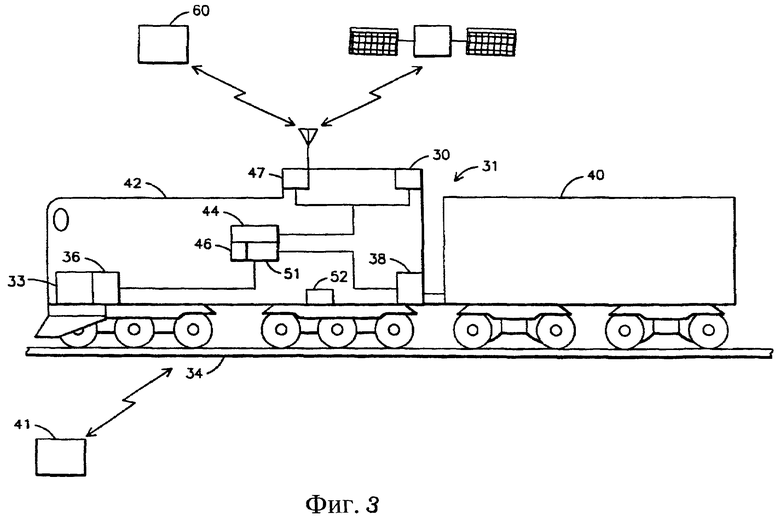
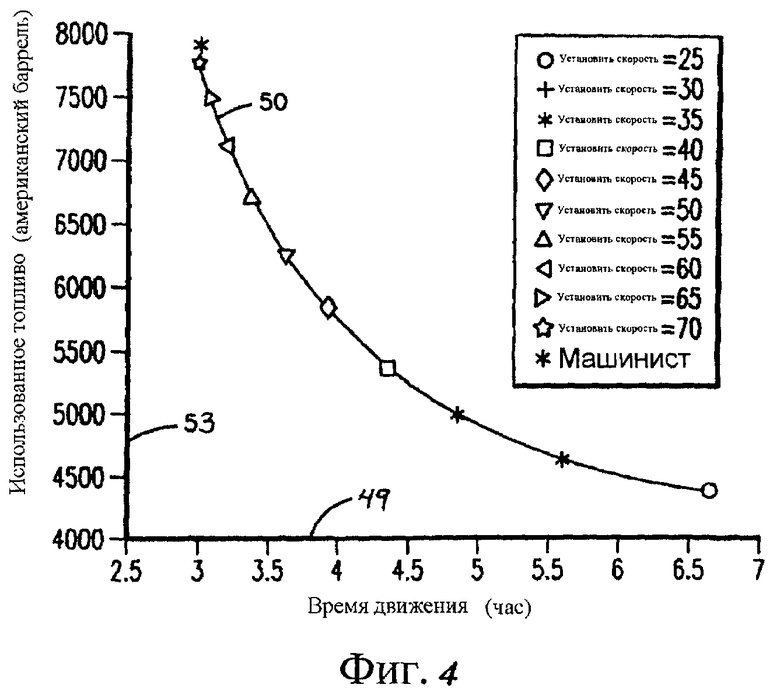
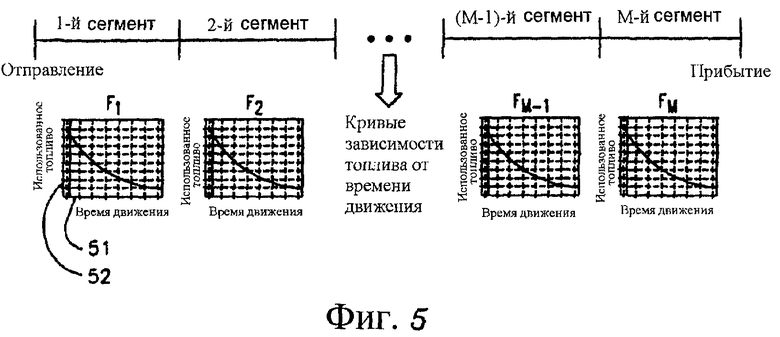
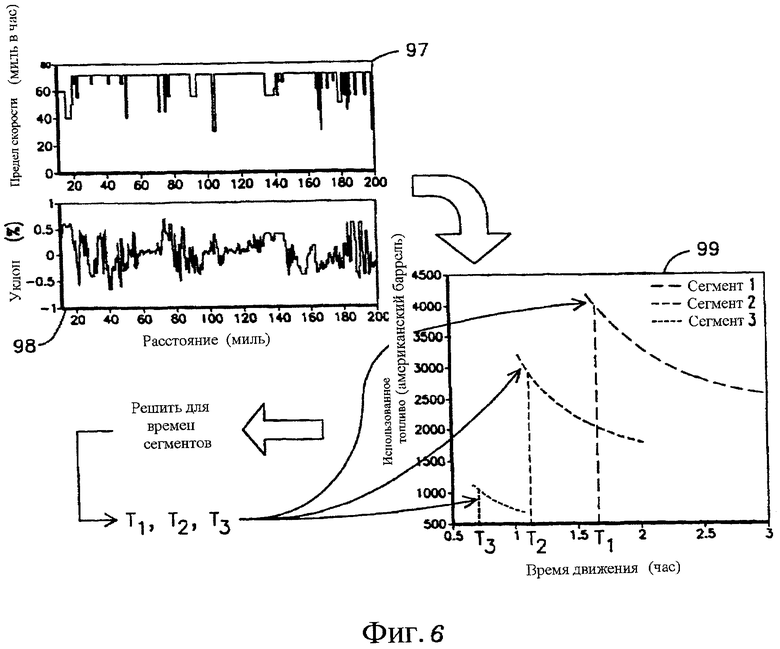
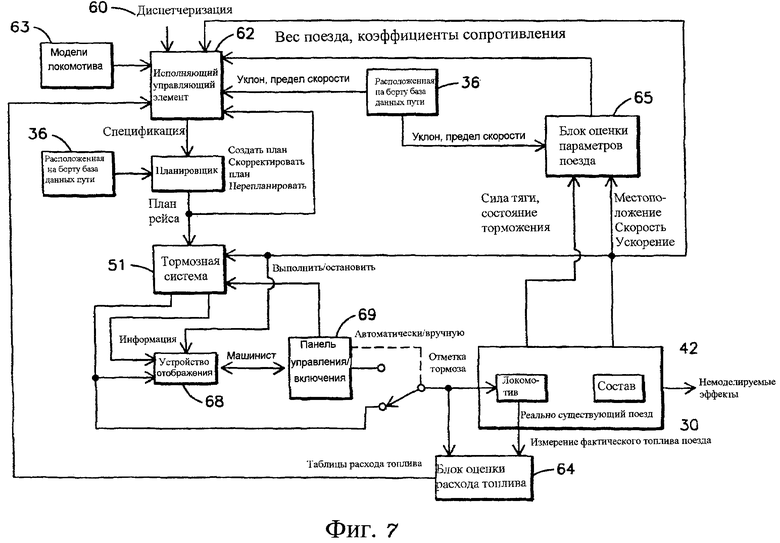
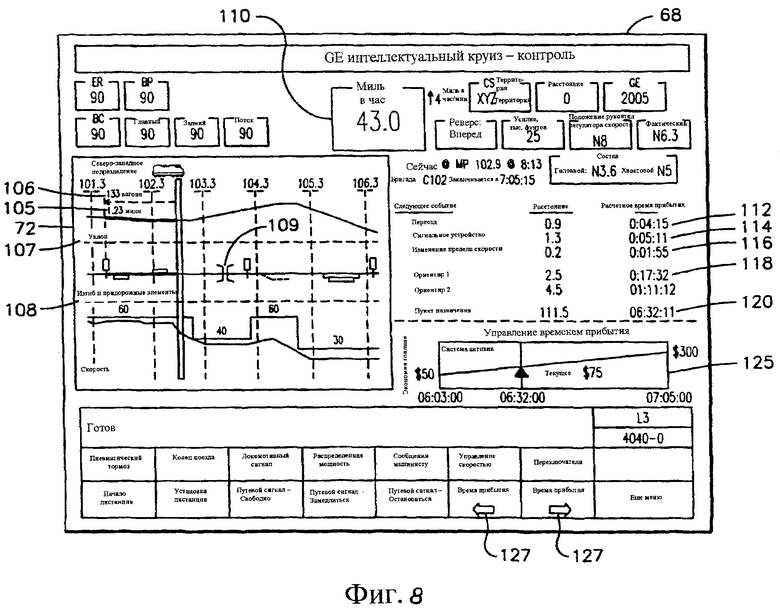
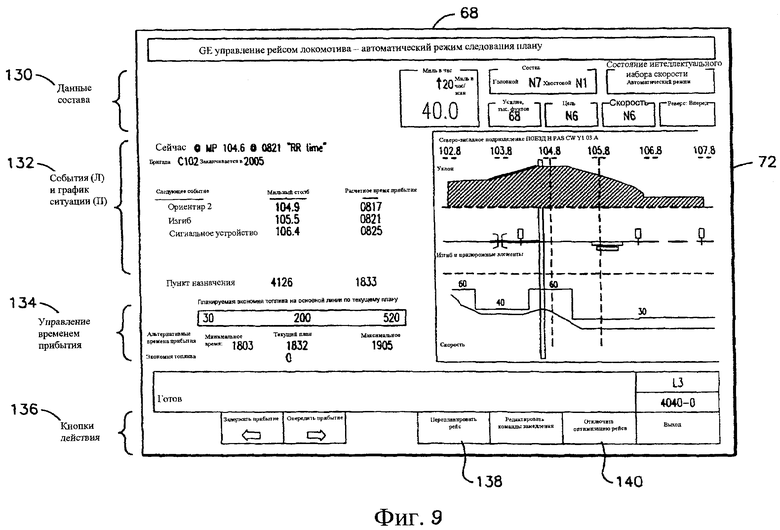
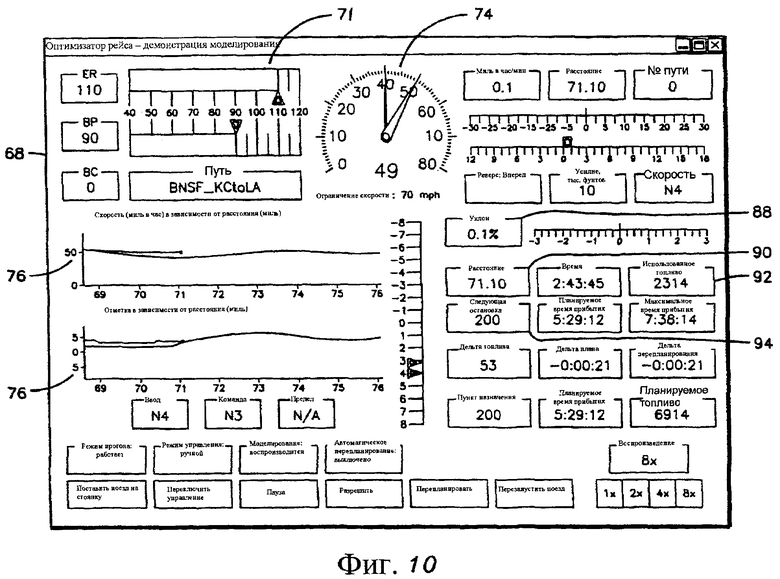
Группа изобретений относится к оптимизации эксплуатации поезда. Система для управления поездом, имеющим один или более локомотивных составов, содержит: компонент-локатор для определения местоположения поезда; описывающий путь компонент для предоставления информации о пути; процессор, выполненный с возможностью получения информации от компонента-локатора и описывающего путь компонента и выполненный с возможностью создания на борту поезда плана. Процессор выполнен с возможностью создавать план движения частично исходя из условия наложения ограничений на изменения положения рукоятки. Система также содержит элемент контроллера для автономного управления поездом. Способ управления поездом содержит этапы, на которых: принимают информацию о местоположении поезда на пути; принимают информацию о характеристике пути; принимают информацию об условиях работы одного или более составляющих локомотивов; создают на борту поезда план рейса на основе местоположения поезда в соответствии с по меньшей мере одним эксплуатационным критерием для поезда, причем план движения создают частично исходя из условия наложения ограничений на изменения положения рукоятки. Также автономно управляют поездом при его следовании вдоль пути согласно плану движения. Решение направлено на оптимизацию эксплуатации поезда. 2 н. и 5 з.п. ф-лы, 10 ил.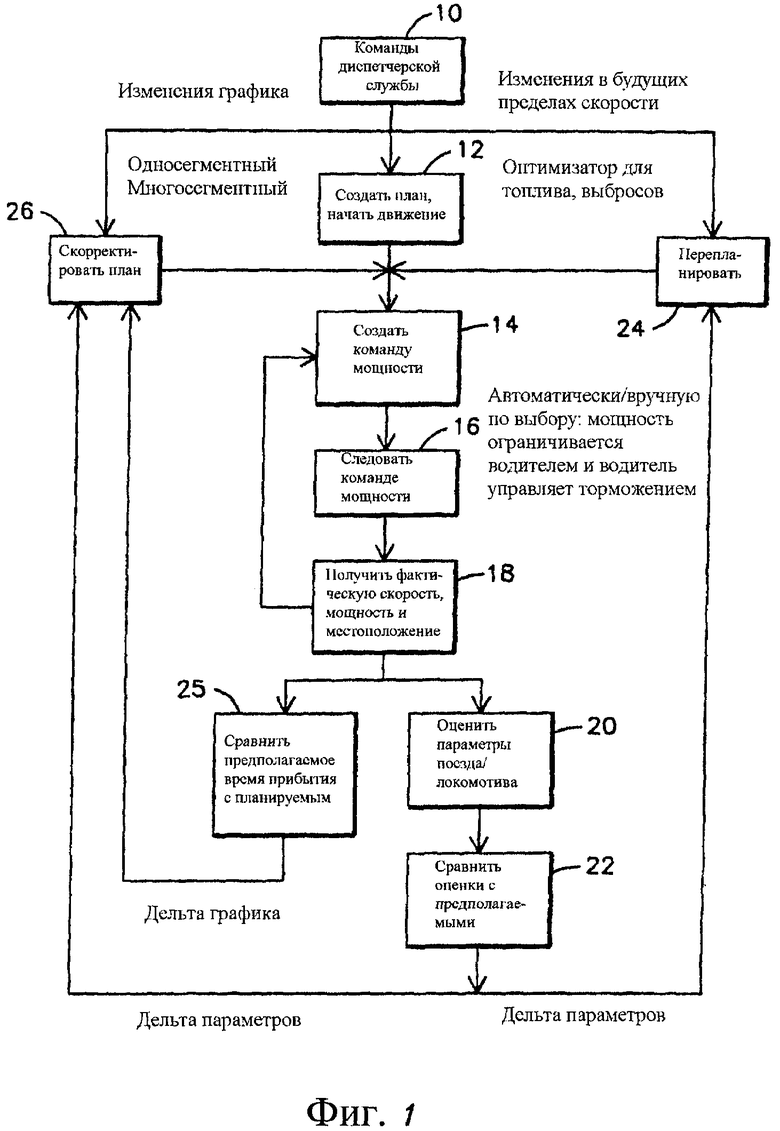
1. Система для управления поездом, имеющим один или более локомотивных составов, где каждый локомотивный состав содержит один или более локомотивов, причем система содержит:
компонент-локатор для определения местоположения поезда;
описывающий путь компонент для предоставления информации о пути;
процессор, выполненный с возможностью получения информации от компонента-локатора и описывающего путь компонента и выполненный с возможностью создания на борту поезда плана рейса в любое время во время движения поезда вдоль железнодорожного пути, что оптимизирует параметры функционирования поезда в соответствии с одним или более эксплуатационными критериями поезда, причем процессор выполнен с возможностью создавать план движения частично исходя из условия наложения ограничений на изменения положения рукоятки; и
элемент контроллера для автономного управления поездом при его следовании вдоль пути согласно плану движения.
2. Система по п.1, в которой процессор выполнен с возможностью создавать план пути в начале движения поезда вдоль рельсового пути и независимо от других поездов, движущихся вдоль рельсового пути, при этом план пути покрывает весь путь.
3. Способ управления поездом, имеющим один или более локомотивный состав, причем каждый локомотивный состав содержит один или более локомотивов, при этом способ содержит этапы, на которых:
принимают информацию о местоположении поезда на пути;
принимают информацию о характеристике пути;
принимают информацию об условиях работы одного или более составляющих локомотивов,
создают на борту поезда план рейса в любое время во время движения поезда вдоль железнодорожного пути на основе местоположения поезда, характеристик пути и условий функционирования одного или более локомотивных составов в соответствии с по меньшей мере одним эксплуатационным критерием для поезда, причем план движения создают частично исходя из условия наложения ограничений на изменения положения рукоятки и
автономно управляют поездом при его следовании вдоль пути согласно плану движения.
4. Способ по п.3, дополнительно содержащий этапы, на которых:
передают требование оптимальной мощности и
управляют по меньшей мере одним из локомотива, локомотивного состава и поезда в соответствии с оптимальной мощностью.
5. Способ по п.3, дополнительно содержащий этапы, на которых:
передают оптимальный установочный параметр положения рукоятки регулятора скорости, выбранный из множества установочных параметров, и
автоматически управляют по меньшей мере одним из локомотива, локомотивного состава и поезда в соответствии с оптимальным установочным параметром положения рукоятки регулятора скорости.
6. Способ по п.3, в котором план движения создают частично исходя из условия наложения ограничений на изменения положения рукоятки при использовании плана движения для управления поездом.
7. Способ по п.3, в котором план движения создают в начале пути движения поезда вдоль железнодорожного пути и независимо от других поездов, перемещающихся вдоль этого железнодорожного пути, при этом план пути покрывает весь путь.

