Изобретение относится к области гидротехнического строительства и может быть использовано при разработке грунта землесосными снарядами.
В гидротехническом строительстве наибольшее распространение получили землесосные работы землесосными снарядами, с помощью которых грунт всасывается грунтозаборным устройством и перекачивается к месту укладки в виде пульпы. При этом разработка, транспортировка и укладка грунта осуществляются в едином непрерывном технологическом цикле.
Эффективность работы землесосного снаряда в основном определяется интенсивностью, с которой грунтозаборное устройство отделяет грунт от массива в забое, а также пропорцией, в которой этот грунт смешивается с водой. Известны системы, с помощью которых реализуются задачи, связанные с управлением рабочих перемещений землесосного снаряда [1; 2].
Недостатками этих систем является то, что управление ведется без учета в реальном масштабе времени массовой производительности землесосного снаряда в моменты возникновения критических режимов, определяемых по току загрузки электродвигателя привода грунтового насоса, при этом возникают неконтролируемые отклонения от оптимального режима работы землесосного снаряда, что снижает эффективность его работы в целом.
Известен способ измерения массового расхода и плотности жидкости подаваемой центробежным электронасосом (прототип). Способ основан на анализе паспортных и действительных рабочих характеристик центробежного электронасоса, путем измерения текущего значения потребляемой мощности электродвигателем привода насоса и создаваемого им давления.
Техническим результатом изобретения является повышение точности и надежности систем для управления рабочими перемещениями землесосного снаряда.
Технический результат достигается путем измерения и поддержания его массовой производительности в оптимальном режиме.
Отличие от известных систем для управления рабочими перемещениями землесосных снарядов состоит в том, что она содержит микропроцессорный контроллер, ЭВМ, в памяти которой находятся значения расходной и напорной характеристик насосной установки и ее эксплуатационный коэффициент, а также зависимость КПД электродвигателя от потребляемой активной мощности из сети, в цепи питания приводного электродвигателя измерительные трансформаторы тока и напряжения, на входе насоса датчик вакуумметра для измерения разрежения, на выходе из насоса датчик давления, причем выходы с измерительных трансформаторов тока и напряжения, датчика для измерения разрежения, датчика для измерения давления на выходе из насоса, поданы на входы микропроцессорного контроллера, который по текущим мгновенным действующим значениям давления и разряжения, тока и напряжения питающей сети электродвигателя вычисляет давление, развиваемое насосом, путем сложения давления на входе насоса с значением разрежения на входе насоса и активную мощность, потребляемую электродвигателем привода насоса из сети, путем умножения мгновенного значения тока на мгновенное значение напряжения и коэффициент-корень квадратный из трех и передает данные на ЭВМ, которая вычисляет мощность, действующую на валу насоса, путем умножения найденного значения активной мощности, потребляемой из сети, на КПД электродвигателя привода насоса, полученного из зависимости КПД от мощности, потребляемой из сети, вычисляет расходный коэффициент путем вычитания из результата деления мощности, действующей на валу насоса, умноженной на эксплуатационный коэффициент, на создаваемое им давление, результата деления мощности на валу насоса на создаваемое им давление при закрытой задвижке на выходе из насоса, вычисляет значение объемного расхода по математическому описанию расходной характеристики, находит по напорной характеристике насоса значение напора от вычисленного значения объемного расхода, вычисляет плотность подаваемой жидкости путем деления давления, создаваемого насосом, на значение найденного напора и ускорения свободного падения, вычисляет массовый расход путем умножения объемного расхода на плотность, сравнивает полученное действующее значение массового расхода с заданным значением и в случае отклонения действующего значения от заданного значения регулирует подачу грунтозаборного устройства до тех пор и в такую сторону, пока значения действующего массового расхода и заданного станут равными между собой.
Доказательство существующих отличительных признаков предлагаемой автоматизированной информационной системы для управления устройствами рабочих перемещений землесосного снаряда проводилось только по сравнению с указанными выше.
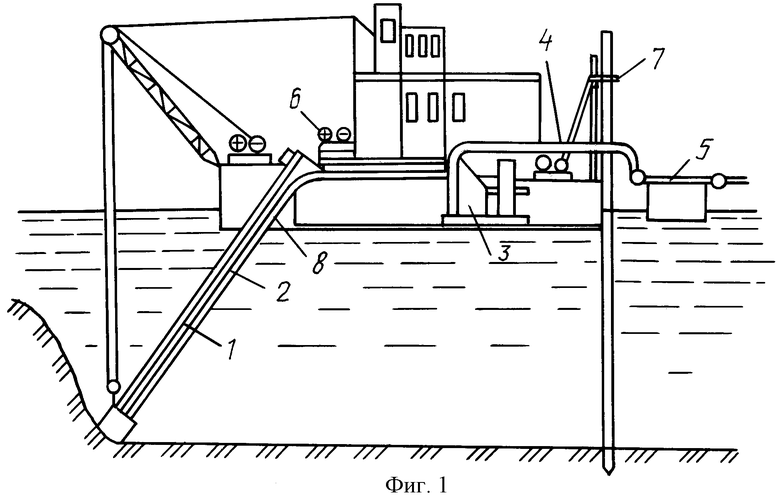
На фиг.1 дана схема землесосного снаряда.
На фиг.2 даны рабочие характеристики грунтового насоса землесосного снаряда.
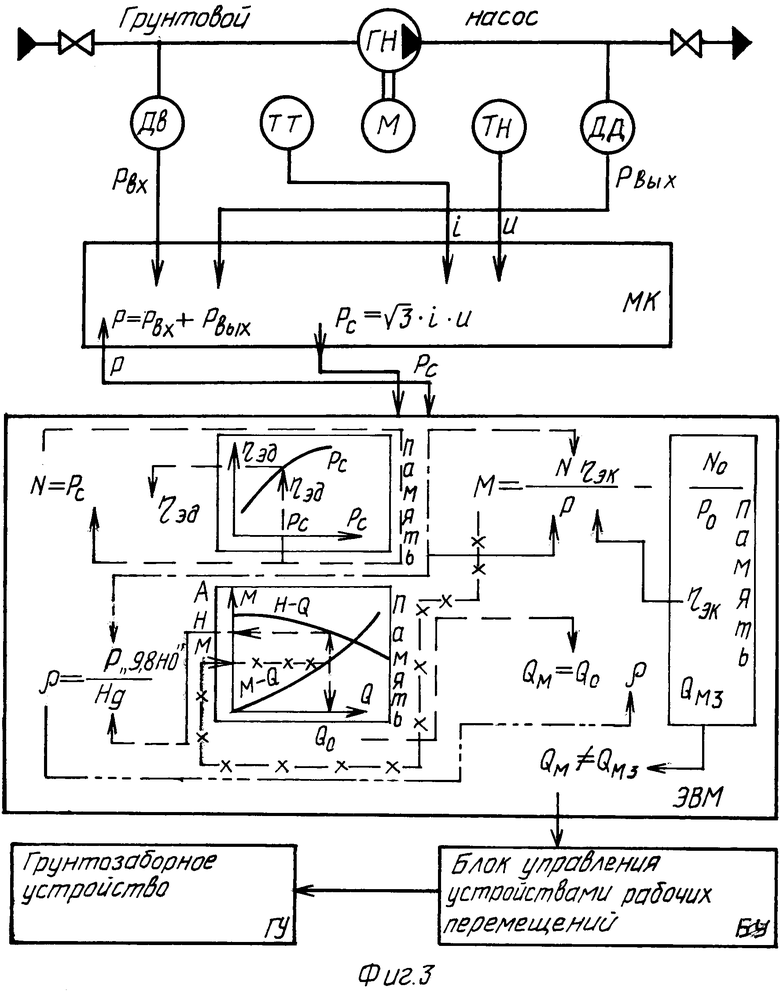
На фиг.3 дана структурная схема и алгоритм функционирования информационной системы для управления устройствами рабочих перемещений землесосного снаряда.
Гидромеханизация представляет собой гидравлический способ производства земляных работ, состоящий в непосредственном использовании энергии водного потока для разработки, транспортировки и укладки грунта. Гидромеханизацию применяют в гидротехническом, энергетическом, транспортном, гидромелиоративном и водохозяйственном строительстве, в горном деле, в цветной металлургии. С помощью гидромеханизации разрабатывают выемки и каналы, добывают полезные ископаемые, строят земляные плотины и дамбы. Большинство гидромеханизированных работ выполняется землесосным способом, при этом обеспечивается возможность объединения в непрерывную цепочку процессов добычи, транспортирования, обогащения и складирования песчано-гравийных материалов, а также возможность полной отработки глубоких месторождений. Для производства работ землесосным способом служат землесосные снаряды. Землесосный снаряд представляет собой землеройно-транспортную машину непрерывного действия, разрабатывающую грунт под водой на глубине до нескольких десятков метров с производительностью до нескольких тысяч кубических метров грунта в час. Дальность гидротранспортировки грунта может быть до нескольких километров.
Землесосный снаряд, схема которого дана на фиг.1, состоит из следующих узлов: грунтозаборного устройства 1; всасывающего пульпопровода 2; грунтового насоса 3; напорного пульпопровода 4; плавучего пульпопровода 5; лебедки 6; свайного хода 7; корпуса 8.
Назначение перечисленных узлов, входящих в систему управления, следующее. Грунтозаборное устройство 1 предназначено для непрерывного отделения некоторого количества грунта от массива забоя и смешивания его с водой. Всасывающий пульпопровод 2 служит для соединения грунтозаборного устройства с грунтовым насосом. Грунтовой насос 3 служит для перемещения грунта. Напорный пульпопровод 4 служит для соединения грунтового насоса с береговым пульпопроводом. Береговой пульпопровод 5 служит для транспортировки перекачиваемой пульпы к месту назначения. Лебедка 6 предназначена для подъема и опускания грунтозаборного устройства. Свайный ход 7 служит для рабочего перемещения землесосного снаряда, при котором обеспечивается непрерывный контакт грунтозаборного устройства с разрабатываемым грунтом, и осуществляет необходимое давление для механического разрушения грунта рыхлителем. Корпус 8 является связующим звеном всех систем землесосного снаряда. В основе управления устройствами рабочих перемещений землесосного снаряда лежит управление грунтозаборным устройством, которое осуществляет всасывание гидросмеси непосредственно без предварительного разрыхления или с помощью использования специальных разрыхлителей. Оптимальный режим работы землесосного снаряда может быть обеспечен только при наличии заданной консистенции перекачиваемой жидкости, которая характеризуется ее плотностью и применительно к насосной установке - массовой производительностью. При этом плотность перекачиваемой жидкости зависит от скорости перемещения и заглубления грунтозаборного устройства. Перемещение грунтозаборного устройства может осуществляться канатным способом, свайно-канатным способом, свайно-безканатным способом и комбинированным способом.
Задача изобретения состоит в том, чтобы обеспечить такую скорость перемещения грунтозаборного устройства и его заглубления, при которой будет оптимальная плотность перекачиваемой жидкости.
В рассматриваемой информационной системе в качестве расходомера и плотномера используется непосредственно рабочий центробежный электронасос. Это позволяет решать задачу измерения расхода без установки каких-либо технических средств непосредственно в измеряемый поток жидкости. При этом измерение производительности осуществляется на основе анализа активной мощности, потребляемой электродвигателем привода электронасоса из сети, и давления, развиваемого электронасосом. Этот анализ производится по паспортным характеристикам насосной установки (фиг.2) путем вычисления расходного коэффициента М, который представляет из себя отношение мощности N, действующей на валу насоса, умноженной на эксплуатационный коэффициент η эк, к создаваемому им давлению р, минус отношение мощности No, действующей на валу насоса, к создаваемому им давлению ро при закрытой задвижке на выходе из насоса при нулевой производительности, которые берутся из паспортной характеристики насоса по формуле:
где N=Рсη эд (кВт) - мощность на валу насоса,
Рс с η эд - соответственно активная мощность, потребляемая электродвигателем привода насоса из сети (кВт) и его КПД;
давление, развиваемое насосом, равно:
при наличии подпора на его входе 
при режиме всасывания 
Затем по вычисленным значениям расходных коэффициентов М строится расходная характеристика M-Q. Действительная рабочая характеристика насоса может отклоняться от паспортной, поэтому при расчете расходного коэффициента используется эксплуатационный коэффициент η эк, который характеризует отклонение рабочих характеристик насоса от паспортных значений. Он определяется периодически при работе насоса на закрытую задвижку по формуле:
где No и ро - соответственно мощность на валу насоса и давление, взятые из паспортной характеристики насосной установки при закрытой задвижке, кВт и кг/см2; Nот и рот - соответственно мощность на валу насоса и давление развиваемые насосом полученные при текущим измерении при работе насоса на закрытую задвижку, кВт и кг/см2. Действительный расходный коэффициент М при работающей насосной установке будет равен:
Вычисление объемного расхода может производится непосредственно по расходной характеристике M-Q, представленной в графическом виде, или по формуле:

где коэффициенты В и С получены при математическом описании расходной характеристики М-Q.
Для определения плотности перекачиваемой жидкости по найденному значению расходного коэффициента М1 (фиг.2) точки Б находим точку К на расходной характеристике M-Q, а по ней в точке Д расход Q1, который соответствует в точке Е давлению р1 и напору H1. Тогда плотность перекачиваемой жидкости будет равна:
Массовый расход Qм перекачиваемой жидкости будет равен:

Для рассматриваемого насоса ГрУ 2000/63 расходный коэффициент М и расход Q равны:

Информационная система для управления устройствами рабочих перемещений землесосного снаряда, структурная схема и алгоритм которой даны на фиг.3, состоит из: грунтового насоса - ГН с приводным электродвигателем; датчика вакуумметра - ДВ для измерения разрежения на входе в насос, датчика давления - ДД на выходе из насоса, измерительного трансформатора тока - ТТ и измерительного трансформатора напряжения - ТН в цепи питания электродвигателя привода насоса, микропроцессорного контроллера МК, ЭВМ; блока управления устройствами рабочих перемещений - БУ; грунтозаборного устройства - ГУ. В рассматриваемой информационной системе в качестве расходомера и плотномера используется непосредственно рабочий центробежный электронасос. Это позволяет решать задачу измерения расхода без установки каких-либо технических средств непосредственно в измеряемый поток жидкости.
Система работает следующим образом (фиг.3). В период работы насоса значение разрежения рвх с датчика вакуумметра ДВ, давления рвых с датчика давления ДД и значение тока i с измерительных трансформаторов тока ТТ и значения напряжения u с измерительного трансформатора напряжения ТН подаются на микропроцессорный контроллер МК, который вычисляет давление, создаваемое насосом р, и значение активной мощности Рс, потребляемой электродвигателем привода насоса из сети по мгновенным значениям напряжения и тока по формулам:

Рс=√ 3 i u cosϕ (кВт);
где i A, u кВ, cosϕ - мгновенные значения тока и напряжения, действующие в сети питания электродвигателя, и коэффициент мощности. Далее, значения мощности и давления подаются контроллером в ЭВМ, в памяти которой заложены напорная Н-Q, расходная M-Q характеристики и характеристика зависимости КПД η эд-Рс, где Рс - мощность потребляемая электродвигателем привода насоса из сети, значение эксплуатационного коэффициента η эк, отношение мощности действующей на валу насоса Nо к развиваемому им давлению ро при закрытой задвижке на выходе насоса, а также заданное значение массового расхода Qмз. По измеренному значению мощности Рс с использованием характеристики η эд-Рс находится КПД насоса и по известному значению мощности Рс вычисляется мощность, действующая на валу насоса N, по формуле:
N=Pc·η эд (кВт)
Далее вычисляется расходный коэффициент М по формуле:
По найденному значению расходного коэффициента М по характеристике M-Q определяется объемный расход Qо, на напорной характеристике H-Q определяется при действующем давлении р значение напора Н, по которым вычисляется плотность перекачиваемой пульпы по формуле:
Затем вычисляется массовый расход Qм
Ом=Qo ρ 10-3 т/м3,
который сравнивается с заданным значением массового расхода Qм т/м
Новизной изобретения является непрерывное измерение и регулирование в заданных пределах концентрации пульпы подаваемой насосом путем измерения массового расхода непосредственно насосным агрегатом - как расходомером, без установки в потоке жидкости каких-либо измерительных устройств. Проведенный поиск по научно-техническим и патентным источникам информации аналогов и выбранный из перечня аналогов прототип позволил выявить отличительные признаки в заявленном техническом решении, следовательно, заявляемая информационная система для управления устройствами рабочих перемещений землесосного снаряда удовлетворяет критерию изобретения "новизна".
В обнаруженной информации отсутствуют сведения об указанном техническом результате, из нее не выявляется влияние отличительных признаков на достижение технического результата, следовательно, данное техническое решение удовлетворяет критерию "изобретательский уровень".
Критерий изобретения "промышленная применимость" подтверждается тем, что использование предлагаемой информационной системы позволяет найти широкое применение на всех землесосных снарядах.
Источники информации
1. Шкундин Б.М. Землесосные работы в гидротехническом строительстве: Учеб. пособие для вузов. - М.: Высшая школа, 1977. - 239 с.
2. Шкундин Б.М. Машины для гидромеханизации земляных работ/ Под ред. С.П. Епифанова и др. - 2-е изд., перераб. и доп. - М.: Стройиздат, 1982. – 183 с.
3. RU 2119148 С1, 6 G 01 F 1/34. Способ измерения массового расхода и плотности жидкости, подаваемой центробежным электронасосом /Кричке В.О., Громан А.О., Кричке В.В. - №96104446. Заявл. 05.03.96 // Бюл. - №26. - 1998.

Изобретение относится к области гидротехнического строительства и может быть использовано при разработке грунта землесосными снарядами. Техническим результатом является повышение точности и надежности системы для управления рабочими перемещениями землесосного снаряда путем измерения и поддержания его массовой производительности в оптимальном режиме. Поставленная цель достигается тем, что она содержит микропроцессорный контроллер, ЭВМ, в памяти которой находятся значения расходной и напорной характеристик насосной установки и ее эксплуатационный коэффициент, а также зависимость КПД приводного электродвигателя от потребляемой активной мощности из сети, измерительные трансформаторы тока и напряжения, датчики для измерения давления, создаваемого насосом, причем выходы этих датчиков поданы на входы микропроцессорного контроллера, который вычисляет значение давления, развиваемого насосом, и активную мощность, потребляемую электродвигателем привода насоса из сети, и передает данные на ЭВМ, которая вычисляет объемный расход, плотность, а по ним - массовый расход и сравнивает его с заданным значением и в случае несовпадения регулирует подачу грунтозаборного устройства до тех пор и в такую сторону, пока они станут равными между собой. 3 ил.
Информационная система для управления устройствами рабочих перемещений землесосного снаряда, содержащая грунтозаборное устройство, лебедку, всасывающий пульпопровод, грунтовой насос, свайный ход, рабочую лебедку, отличающаяся тем, что она содержит микропроцессорный контроллер, ЭВМ, в памяти которой находятся значения расходной и напорной характеристик насосной установки и ее эксплуатационный коэффициент, а также зависимость кпд электродвигателя от потребляемой активной мощности из сети, в цепи питания приводного электродвигателя измерительные трансформаторы тока и напряжения, на входе насоса датчик вакуумметра для измерения разрежения, на выходе из насоса датчик давления, причем выходы с измерительных трансформаторов тока и напряжения, датчика для измерения разрежения, датчика для измерения давления на выходе из насоса поданы на входы микропроцессорного контроллера, который по текущим мгновенным действующим значениям давления и разрежения, тока и напряжения питающей сети электродвигателя вычисляет давление, развиваемое насосом, путем сложения давления на выходе насоса с значением разрежения на входе насоса и активную мощность потребляемую электродвигателем привода насоса из сети путем умножения мгновенного значения тока на мгновенное значение напряжения и коэффициент - корень квадратный из трех и передает данные на ЭВМ, которая вычисляет мощность, действующую на валу насоса, путем умножения найденного значения активной мощности, потребляемой из сети, на кпд электродвигателя привода насоса, полученного из зависимости кпд от мощности, потребляемой из сети, вычисляет расходный коэффициент путем вычитания из результата деления мощности, действующей на валу насоса, умноженной на эксплуатационный коэффициент, на создаваемое им давление, результата деления мощности на валу насоса на создаваемое им давление при закрытой задвижке на выходе из насоса, вычисляет значение объемного расхода по математическому описанию расходной характеристики, находит по напорной характеристике насоса значение напора от вычисленного значения объемного расхода, вычисляет плотность подаваемой жидкости путем деления давления, создаваемого насосом, на значение найденного напора и ускорение свободного падения, вычисляет массовый расход путем умножения объемного расхода на плотность, сравнивает полученное действующее значение массового расхода с заданным значением и в случае отклонения действующего значения от заданного значения регулирует подачу грунтозаборного устройства до тех пор и в такую сторону, пока значения действующего массового расхода и заданного станут равными между собой.
| Устройство для управления землесосным снарядом | 1990 |
|
SU1717742A1 |
| Устройство для контроля подачи насоса | 1988 |
|
SU1617201A1 |
| СПОСОБ ИЗМЕРЕНИЯ МАССОВОГО РАСХОДА И ПЛОТНОСТИ ЖИДКОСТИ, ПОДАВАЕМОЙ ЦЕНТРОБЕЖНЫМ ЭЛЕКТРОНАСОСОМ | 1996 |
|
RU2119148C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛОТНОСТИ И СКОРОСТИ ДВИЖЕНИЯ ПОТОКА ГИДРОСМЕСИ ВО ВСАСЫВАЮЩЕМ ТРУБОПРОВОДЕ ЗЕМСНАРЯДА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2039163C1 |
| ЗЕМЛЕСОСНЫЙ СНАРЯД | 1992 |
|
RU2013497C1 |
| Механизм обката | 1987 |
|
SU1585098A1 |
| US 4821580 A, 18.04.1989. | |||

