Изобретение относится к гидромеханизации, а именно к устройствам для автоматизации землесосных снарядов, используемых в транспортном строительстве и других отраслях народного хозяйст- ва.
Известно устройство для контроля грун- тозабора земснаряда, содержащее датчики электропроводности пульпы и рабочей жидкости, датчик вакуума, блоки измерения, ис- точники опорных сигналов, блоки логической обработки, сигнализации и индикации, компараторы и блоки задержки. Устройство позволяет контролировать эф- фективность грунтозабора и своевременно выявлять отклонения технологических параметров от нормы.
Однако устройство не позволяет контролировать степень износа или эффективность работы грунтового наноса.
Известно устройство для управления землесосным снарядом, содержащее датчики-расхода, мощности грунтового насоса, плотности, напора и разрежения, блоки определения допустимой величины вакуума и ожидаемого расхода, блок сравнения, блок контроле и исполнительный механизм, регулирующий скорость папильонирования. Режим работы землесосного снаряда определяется по показаниям первых четырех датчиков, при этом, параметр контроля и регулирования рассчитывается по формуле
102
Q(t)-y(t)
M(t)
, 2gQ2(t+7)
+
c2
OB
(D
где N(t) - мощность, потребляемая грунтовым насосом;
Q(t) - расход пульпы;
y(t) - плотность пульпы;
M(t) - напор в напорном трубопрово- де;
КПД системы насос - трубопровод;
SH, SB - площадь поперечного сечения напорного и всасывающего трубопроводов.
Расчетное значение Vg(t) считается оптимальным и сравнивается с текущим разрежением V(t) во всаее. Регулирование земснаряда ведется по результату этого сравнения. В формуле (1) КПД гидросисте- мы считается постоянным и соответствует паспортному КПД грунтового насоса. Однако по мере перекачки высокоабразивной гидросмеси, например гравия, крупного пе
5
0 5
0
5 0
5
0
5
50
ска и др., гидравлические качества насосов постепенно ухудшаются, что приводит к снижению напора, развиваемого насосом, а значит, и производительности земснаряда по грунту. При этом точность регулирования по формуле (1) уменьшается из-за неучтенного изменения КПД. В процессе перекачки гидросмеси наиболее быстро изнашивается рабочее колесо. Поскольку оно оказывает определяющее влияние на рабочие характеристики1насосов, то определение экономически целесообразного срока службы колеса Т является важной народнохозяйственной задачей. Для теоретического решения этой задачи необходимо знать для каждой категории грунта напор H(Q, t) и КПД rj(Q, t) насоса, соответствующие рабочему расходу Q в текущий момент времени t. В настоящее время эта задача не решена. Предлагаемый путь решения задачи по определению целесообразного срока службы Т рабочего колеса основан на систематическом измерении величины (Q, t) (например, один.раз в неделю) и подстановки ее в соответствующие формулы для расчета Т. При этом регулирование режима земснаряда ведется по (I) с учетом изменения КПД..
Целью изобретения является повышение производительности земснаряда и эффективности его использования за счет повышения точности регулирования технологического режима и определения оптимального срока эксплуатации рабочего колеса..
Поставленная цель достигается тем, что устройство для управления землесосным снарядом, содержащее датчик разрежения, а также датчики расхода, плотности пульпы, напора и мощности грунтового насоса, выходы которых соединены с первым, вторым, третьим и четвертым входами блока определения допустимой величины вакуума (блока вычислений), пятый вход которого соединен с выходом блока определения ожидаемого расхода, вход которого соединен с выходом датчика расхода, а первый выход блока вычислений соединен с первым входом блока контроля, выход которого соединен с первым входом исполнительного механизма, второй вход которого соединен с первым выходом блока сравнения, второй выход которого соединен с вторым входом блока контроля, дополнительно снабжено первым, вторым и третьими мультиплексорами, табло, вторым блоком сравнения, элементом И, первым и вторым ключами, установленными на механизме, опускающем раму, и механизме, открывающем заслонку напорного трубопровода соответственно, а
также первым и вторым регистрами, причем выход первого регистра соединен с первым входом второго блока сравнения, второй вход которого соединен с выходом датчика расхода, а выход соединен с первым входом элемента И, второй и третий входы которого соединены с выходами первого и второго ключей, а выход соединен с шестым входом блока вычислений и первыми входами всех мультиплексоров, первый выход первого мультиплексора соединен с первым входом первого блока сравнения, вход соединен с выходом датчика разрежения, а второй выход соединен с седьмым входом блока выг числений, второй выход которого соединен с вторым входом второго мультиплексора, первый выход которого соединен с вторым входом первого блока сравнения, а второй выход соединен с входом второго регистра, выход которого соединен с вторым входом третьего мультиплексора, первый выход соединен с восьмым входом блока вычислений, при этом блок вычислений, содержащий три блока умножения/блок деления и блок суммирования, первый вход которого является третьим входом блока, а второй и третий входы соединены с выходами соответственно первого и второго блоков умножения, первый и второй входы первого блока умножения являются пятым: входом блока, первый и второй входы второго блока умножения и первый вход третьего блока умножения объединены и являются аервым входом блока, второй вход третьего блока умножения является, вторым входом блока, а выход третьего блока умножения соединен с первым входом блока деления, второй вход которого является четвертым входом блока,, дополнительно снабжен вторым и третьим блоками суммирования, четвертым блоком умножения, вторым блоком деления, блоком пере счета и логическим блоком, выходы которого являются первым и вторым выходами блока вычислений, первый вход логического блока является шестым,,входом блока, второй вход соединен с выходом четвертого блока умножения, а третий вход со единен с выходом третьего блока суммирования, первый вход которого соединен с выходом второго блока деления, а второй вход соединен с выходом первого блока суммирования и вторым входом второго блока суммирования, первый вход которого является седьмым входом блока, а выход соединен с вторым входом четвертого блока умножения, первый вход которого соединен с выходом первого блока деления и вторым входом второго блока деления, первый вход которого соединен с выходом
блока пересчета, первый вход которого является восьмым входом блока, а второй вход соединен с вторым входом третьего блока умножения.
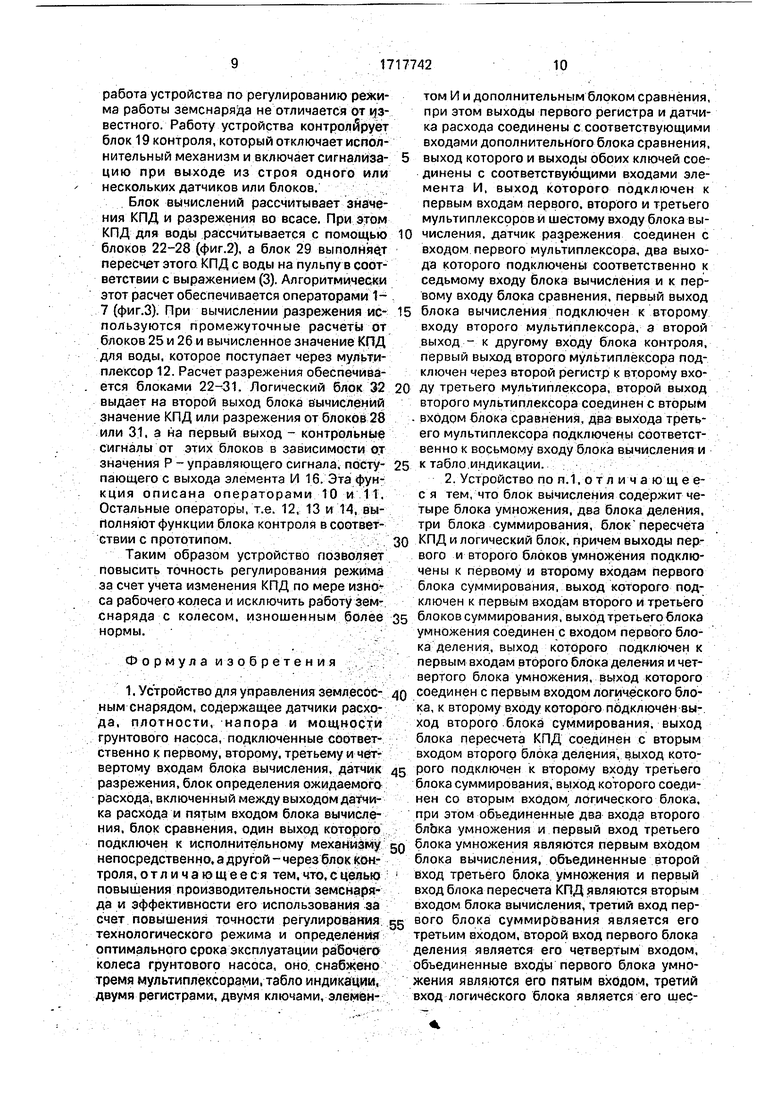
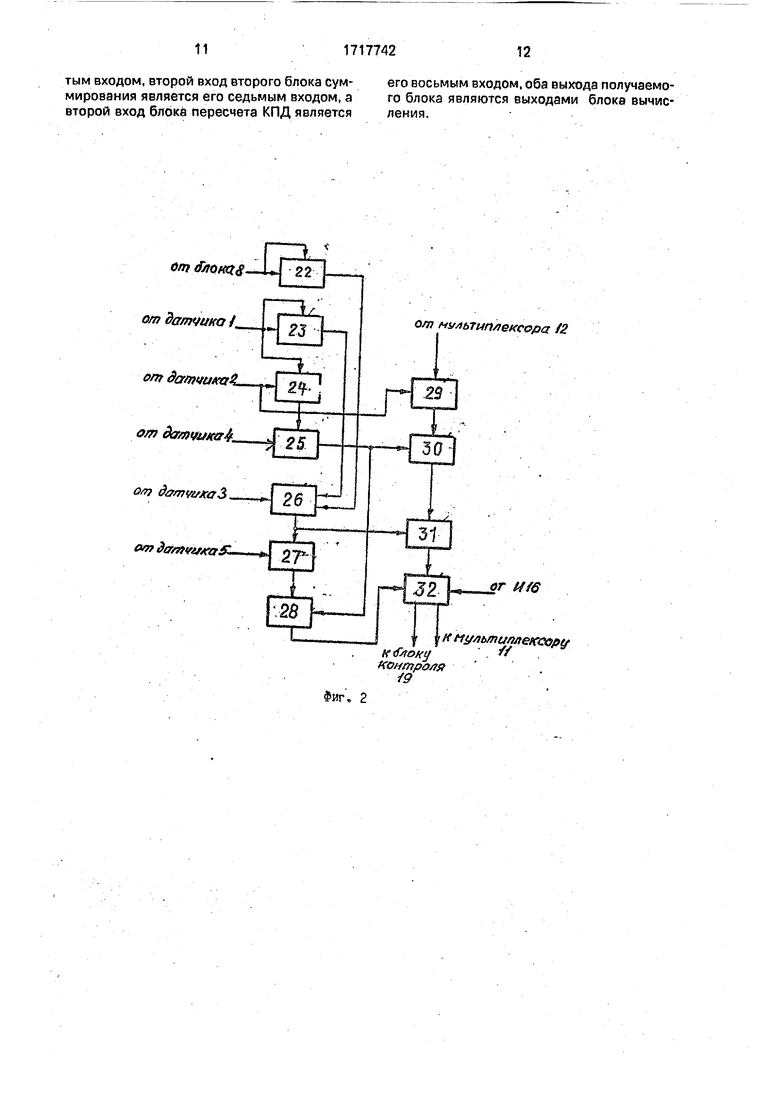
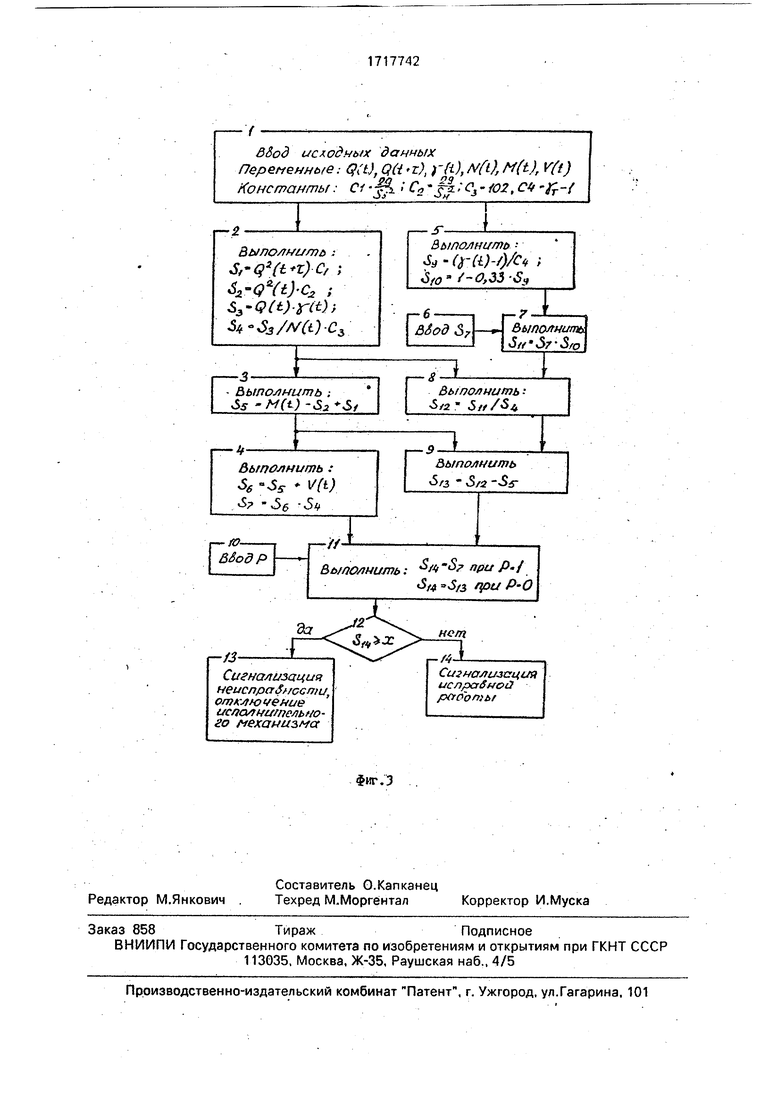
5 На фиг. 1 представлена функциональная схема устройства; на фиг.2 - функциональная схема блока вычислений; на фиг.З - ал- горитм работы блока вычислений.
Устройство содержит датчики расхода 10 1. плотности 2 пульпы, напора 3, мощности 4 грунтового насоса, разрежения 5, блоки 6 и 7 сравнения, блок 8. определения ожидаемого расхода, блок 9 вычислений, мультиплексоры 10,11 и 12, ключи 14 и 15, элемент
5 И 16, регистры 17 и 18, блок 19 контроля, исполнительный механизм 20 и табло 21. Датчики 1-4 подключены к первому, второму, третьему и четвертому входам блока 9 вычислений, датчик 1 кроме того подключен
0 к второму входу блока 6 сравнения и входу блока 8 определения ожидаемого расхода. .Выход блока 8 сеединен с пятым входом блока вычислений, шестой вход которого соединен с первыми входами мультиплексо5 ров 10, 11 и 12 и выходом элемента И 16. Седьмой вход блока вычислений соединен с вторым входом мультиплексора 10, вход которого соединен с выходом датчика 5 разрежения, а первый выход соединен с первым
0 входом блока 7 сравнения. Восьмой вход блока вычислений соединен с вторым выхо- , дом мультиплексора 12, второй вход которого соединен с выходом регистра 18, а первый выход подключен к табло 21. Пер5 вый выход блока вычислений соединен с первым входбм блока 19 контроля, второй вход которого соединен с вторым выходом блока 7 сравнения, а выход Соединен с первым входом исполнительного механизма 20.
0 Второй выход блока вычислений соединен с вторым входом мультиплексора 11. второй выход которого соединен с входом регистра 18, а первый выход соединен с вторым входом блока 7 сравнения, выход которого еое5 динен с вторым; входом исполнительного механизма 20. Входы элемента И 16 соединены с выходами ключей 14 и 15 и блока 6 сравнения соответственно, а первый вход этого блока соединен с выходом регистра
17.
Блок 9 вычислений содержит блоки 22, 23, 24 и 28 умножения, блоки 25 и 30 деления, блоки 26, 27 и 31 суммирования, блок 29 пересчета КПД и логический блок 32. Вхо- ды блоков 22-27, 29 и 32 являются пятым, первым, вторым, четвертым, третьим, седьмым, восьмым и шестым входами блока вычислений соответственно. Третий и второй входы блока 26 соединены с выходами блоков 23 и 22 соответственно, вторые входы
которых соединены со своими первыми входами. Входы блока 23 соединены с первым входом блока 24, выход которого соединен с первым входом блока 25, выход которого соединен с первым входом блока 28 и вторым входом блока 30, выход которого соединен с первым входом блока 31, второй вход которого соединен с выходом блока 26 и вторым входом блока 27, а выход соединен с третьим входом логического блока 32. Выходы блока 32 являются первым и вторым выходами блока вычислений, а второй вход блока 32 соединен с выходом блока 28, второй вход которого соединен с выходом блока 27. Первый вход блока 30 соединен с выходом блока 29, второй вход которого соединен с вторым входом блока 24,
Устройство работает следующим образом.
Перед началом технологического про- це.сса определяется степень износа рабочего колеса путем вычисления параметра tj(Q,t). Определение этого параметра должно выполняться всегда в одних и тех же условиях, т.е. при работе на воде с заданным расходом, при постоянной глубине погружения всасывающего наконечника и постоянной длине напорного трубопровода. Постоянство этих условий обеспечивает однозначность определения ц (Q, t) по мере износа колеса. Для обеспечения этих условий багермейстер опускает раму грунтоза- борного устройства на заданную глубину, открывает задвижку, установленную на напорном трубопроводе вблизи грунтового насоса, затем включает насос и регулировкой устанавливает расход, равный заданному (заданная величина расхода содержится в регистре 17). При этом замыкаются ключи 14 и 15, установленные на механизме, опускающем раму - и механизме, открывающем заслонку, соответственно, а на выходе блока 6 сравнения появляется единичный сигнал, который поступает на вход элемента И 16. На другие входы этого элемента поступают сигналы с выходов ключей 14 и 15, поэтому на его выходе появляется единичный сигнал, который поступает на управляющие входы мультиплексоров 10, 11 и 12. В результате этого выход датчика 5 разрежения подключается к входу блока 9 вычислений, выход блока вычислений подключается к входу регистра 18, а выход этого регистра подключается к входу табло 21,
На входы блока вычислений поступают величины Q(t), Q(t+ T),.y (t),-M(t),- N(t). V(t) и единичный сигнал с выхода элемента И 16.
Поэтому в блоке вычислений рассчитывается величина (t) для воды по формуле
o(t)M(t)+29Q22(t) 5SH
(t+T) +v(t)x
c2
OB
10
Q(t)-y(t)
102 :N(t)
(2)
Полученный КПД передается с выхода блока вычислений через мультиплексор 11 в
регистр 18, запоминается в нем и через мультиплексор 1.2 высвечивается на табло 21. Багермейстер имеет возможность сравнить полученное значение КПД с минимально допустимым и принять решение о
включении земснаряда в работу или замене изношенного колеса новым (минимально допустимый. КПД рассчитывается заранее для воды с экономическим обоснованием времени Т)..
Если расчетный КПД превышает минимально допустимый, то багермейстер опускает раму грунтозаборного устройства и закрывает задвижку на напорном трубопроводе, в результате чего размыкаются ключи
14 и 15 и на входы элемента И 16 поступают сигналы логического нуля. Нулевой сигнал с выхода элемента И 16 поступает на управляющие входы мультиплексоров 10, 11 и 12. При этом выходы датчика 5 разрежения и
блока, вычислений 9 подключаются к входам блока 7 сравнения, а выход регистра 18 подключается к входу блока вычислений. На входы блока вычислений поступают параметры Q(t), QCt+t),y(t), M(t), N(t)7/q(t) и нулевой сигнал с выхода элемента И 16, поэтому в блоке вычислений выполняется пересчет КПД для пульпы по формуле
45
7(t) /o(t)(1-0,33-S),
(3)
«.S-Зёг1-.объемная консистенция пульпы;
УТ - плотность грунта (постоянная для
определенной категории грунта),
и с учетом полученного КПД рассчитывается допустимая величина разрежения Vs(t) во всасе. Этот параметр передается через мультиплексор 1.1 на первый вход блока 7
сравнения. На второй вход этого блока поступает через мультиплексор 10 существующее значение разрежения V(t). Выходной сигнал блока сравнения управляет работой исполнительного механизма 20. При этом
работа устройства по регулированию режима работы земснаряда не отличается от цз- вестного. Работу устройства контролирует блок 19 контроля, который отключает исполнительный механизм и включает сигнализа- 5 цию при выходе из строя одного или нескольких датчиков или блоков.
Блок вычислений рассчитывает значения КПД и разрежения во всасе. При этом КПД для воды рассчитывается с помощью 10 блоков 22-28 (фиг.2), а блок 29 выполняет пересчет этого КПД с воды на пульпу в соответствии с выражением (3). Алгоритмически этот расчет обеспечивается операторами 1- 7 (фиг.З). При вычислении разрежения ис- 15 пользуются промежуточные расчеты от блоков 25 и 26 и вычисленное значение КПД для воды, которое поступает через мультиплексор 1.2. Расчет разрежения обеспечива- ется блоками 22-31. Логический блок 32 20 выдает на второй выход блока вычислений значение КПД или разрежения от блоков 28 или 31, а на первый выход - контрольные сигналы от этих блоков в зависимости от значения Р - управляющего сигнала, посту- 25 лающего с выхода элемента И 16. Эта функция описана операторами 10 и 11. Остальные операторы, т.е. 12, 13 и 14, выполняют функции блока контроля в соответствии с прототипом.30
Таким образом устройство позволяет повысить точность регулирования режима за счет учета изменения КПД по мере изно са рабочего колеса и исключить работу земснаряда с колесом, изношенным более 35 нормы.
Формула изо б ретения
1. Устройство для управления землесос- 40 ным снарядом, содержащее датчики расхода, плотности, напора и мощности грунтового насоса, подключенные соответственно к первому, второму, третьему и четвертому входам блока вычисления, датчик 45 разрежения, блок определения ожидаемого расхода, включенный между выходом датчика расхода и пятым входом блока вычисления, блок сравнения, один выход которого подключен к исполнительному механизму §Q непосредственно, а другой - через блок контроля, отличаю щ е е с я тем, что, с целью повышения производительности земснаряда и эффективности его использования за счет повышения точности регулирования §д технологического режима и определения оптимального срока эксплуатации рабочего колеса грунтового насоса, оно. снабжено тремя мультиплексорами, табло индикации, двумя регистрами, двумя ключами, элементом И и дополнительным блоком сравнения, при этом выходы первого регистра и датчика расхода соединены с соответствующими входами дополнительного блока сравнения, выход которого и выходы обоих ключей соединены с соответствующими входами элемента И, выход которого подключен к первым входам первого, второго и третьего мультиплексоров и шестому входу блока вычисления, датчик разрежения соединен с входом первого мультиплексора, два выхода которого подключены соответственно к седьмому входу блока вычисления и к первому входу блока сравнения, первый выход блока вычисления подключен к второму входу второго мультиплексора, а второй выход- к другому входу блока контроля, первый выход второго мультиплексора подключен через второй регистр к второму входу третьего мультиплексора, второй выход второго мультиплексора соединен с вторым входом блока сравнения, два выхода третьего мультиплексора подключены соответственно к восьмому входу блока вычисления и к табло.индикации. :
2, Устройство по п. 1, от л и чаю щ е е- с я тем, что блок вычисления содержит четыре блока умножения, два блока деления, три блока суммирования, блок пересчета КПД и логический блок, причем выходы перг вого и второго блоков умножения подключены к первому и второму входам первого блока суммирования, выход которого подключен к первым входам второго и третьего блоков суммирования, выход третьего блока умножения соединен с входом первого блока деления, выход которого подключен к первым входам второго блока деления и четвертого блока умножения, выход которого соединен с первым входом логического блока, к второму входу которого подключен вы- ход второго блока суммирования, выход блока пересчета КПД соединен с вторым входом второго блока деления, выход которого подключен к второму входу третьего блока суммирования, выход которого соединен со вторым входом, логического блока, при этом объединенные два входа второго блока умножения и первый вход третьего блока умножения являются первым входом блока вычисления, объединенные второй вход третьего блока умножения и первый вход блока пересчета КПД являются вторым входом блока вычисления, третий вход первого блока суммирования является его третьим входом/второй вход первого блока деления является его четвертым входом, объединенные входы первого блока умножения являются его пятым входом, третий вход логического блока является его шеетым входом, второй вход второго блока сум- его восьмым входом, оба выхода получаемо- мирования является его седьмым входом, а го блока являются выходами блока вычис- второй вход блока пересчета КПД является ления.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления землесосным снарядом | 1989 |
|
SU1677196A1 |
| Устройство для управления землесосным снарядом | 1990 |
|
SU1721191A1 |
| Устройство для управления землесосным снарядом | 1984 |
|
SU1258959A1 |
| Способ контроля степени износа грунтового насоса земснаряда | 1990 |
|
SU1787896A1 |
| Устройство для управления землесосным снарядом | 1987 |
|
SU1437486A2 |
| Устройство для автоматизированного управления земснарядом | 1990 |
|
SU1803504A1 |
| ИНФОРМАЦИОННАЯ СИСТЕМА ДЛЯ УПРАВЛЕНИЯ УСТРОЙСТВАМИ РАБОЧИХ ПЕРЕМЕЩЕНИЙ ЗЕМЛЕСОСНОГО СНАРЯДА | 2002 |
|
RU2237782C2 |
| Устройство для вычисления квадратного корня числа в модулярной системе счисления | 1985 |
|
SU1317434A1 |
| Устройство для умножения комплексных чисел в модулярном коде | 1985 |
|
SU1330631A1 |
| Устройство для умножения чисел в модулярной системе счисления | 1986 |
|
SU1368878A1 |
Изобретение относится к гидромеханизации. Цель изобретения - повышение производительности земснаряда и эффективности его использования. Земснаряд содержит датчики расхода 1, плотности 2 пульпы, напора 3. мощности 4 грунтового насоса, разрежения 5, два блока 6 и 7 сравнения, блок 8 определения ожидаемого расхода, блок 9 вычислений, три мультиплексора 10, 11 и 12, два ключа 14 и 15, элемент И 16, два регистра 17 и 18, блок 19 контроля, исполнительный механизм 20, табло 21. 1 з.п. ф-лы, 3 ил.
Фиг. 2
В&од исходных данных Переменные -. Q(t.)t Q(i -z), )-(i),H(t), M(t), V(t) Константы: Of Jj C2 jj :C3-Ю2,Cb-fc-f
Выполнить -. (t+T)C/ ;
&z-Q(t) C2 ;
S3-Q(t)-X(t)}
Зь-Зз/ММ-С;,
- Выполнить : -А/СО- +З/
Выполнить :
$6 -Ss - Vfr). Ј vSg -5f
r-//
Выполнить: 3/4 Зг при А/ при P-O
да
Сигнализация Heucnpafffccmu, отключение ислолншпельно- го механизма
i /f
Выполнить
s - (-&)-/)/Ј
Sfo /-0,33-Sy
„1
Выполнить
SH $7-Sro
i
8
Выполнить - 5/2 6///«S
выполнить
Sf3 Sf2 $Ј
Сигнализсцьм
исправной
рсюЪтьг
| Устройство для контроля процесса грунтозабора землесосного снаряда | 1986 |
|
SU1320336A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления землесосным снарядом | 1984 |
|
SU1258959A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
