Изобретение относится к балансировочной технике и может быть использовано в конструкциях балансировочных станков.
Цель изобретения - повышение производительности и упрощение процедуры балансировки.
Известен способ определения величины дисбаланса, заключающийся в том, что раскручивают ротор, установленный на роликах, до предельной частоты вращения, измеряют время раскручивания ротора и о величине дисбаланса судят по величине измеренного времени (А.С. №1631335, БИ №8 за 1991 г.).
Наиболее близким по технической сущности к изобретению является способ определения фазы дисбаланса, заключающийся в том, что из сигналов дисбаланса и опорного напряжения формируют измерительный импульс с интервалом времени, пропорциональным фазе дисбаланса, а в результате последующей обработки сигнала судят о фазе дисбаланса (А.С. №724953, БИ №12 за 1980 г.).
Недостаток способа в его ограниченности, поскольку решает задачу определения только фазы дисбаланса.
Цель изобретения - расширить возможности способа и упростить процедуру балансировки.
Цель достигается за счет того, что определяют три последовательных угла поворота ротора, дающих в сумме полный оборот, по которым рассчитывают величину и фазу дисбаланса.
Проведенный заявителем анализ уровня техники, включающий поиск по патентным и научно-техническим источникам информации, позволили установить, что заявителем не обнаружен аналог, характеризующийся признаками, идентичными всем существенным признакам заявленного изобретения.
Следовательно, заявленное изобретение соответствует требованию “новизна” по действующему законодательству.
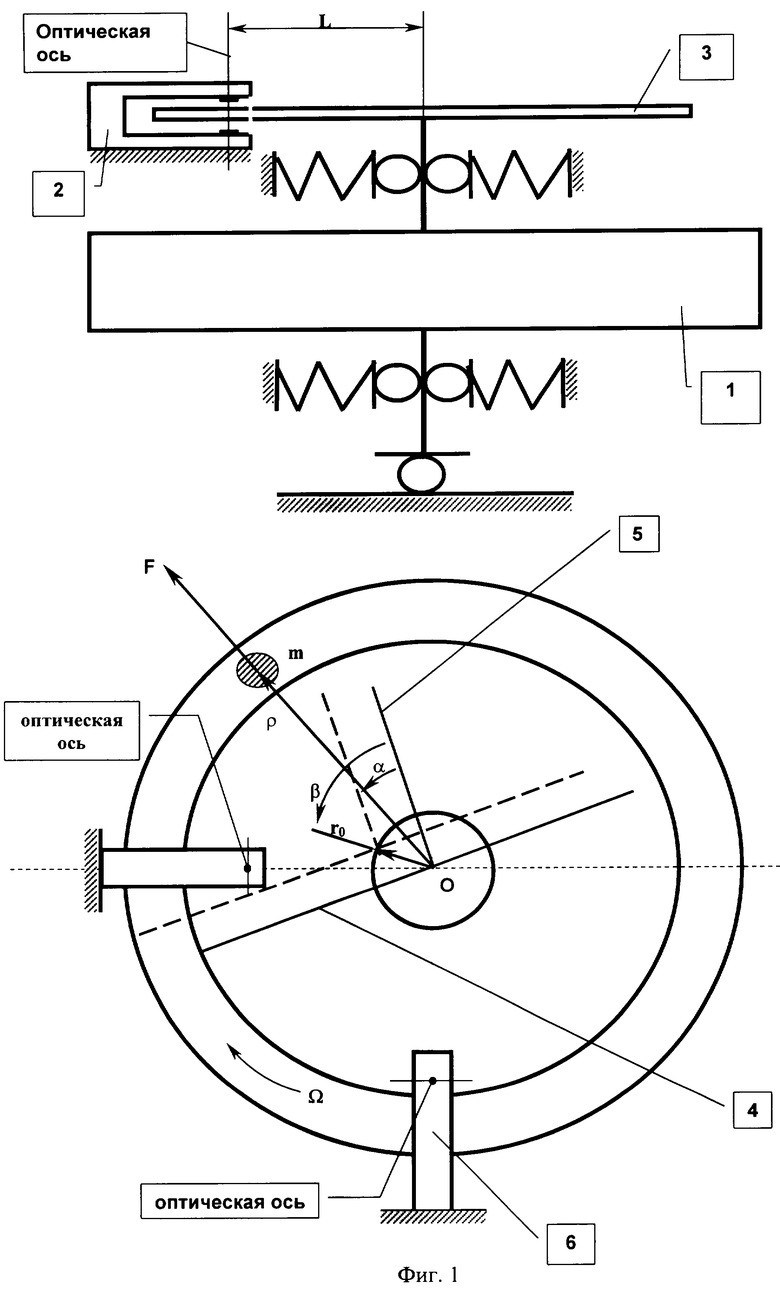
Пусть балансировке подлежит диск 1 (фиг.1), ось которого расположена на упругих опорах. Неподвижно на корпусе балансировочного стенда на расстоянии L от оси вращения диска располагается оптический датчик положения 2, срабатывающий на прерывание светового потока. Жестко на оси диска 1 установлен легкий прозрачный диск 3, через центр которого проходят две ортогонально направленные светонепроницаемые оси 4 и 5. При этом ось 4 имеет в одном направлении размер больший, чем в противоположном. Этот больший размер оси 4 таков, что он может пересекать оптическую ось конечного выключателя 6, выходной сигнал которого используется для включения датчика 2 и запуска таймера (не показан) для измерения интервалов времени Δ ti(i=1, 2, 3).
Пусть m - неуравновешенная масса диска, ρ - радиус расположения неуравновешенной массы. Система координат 4, 5 может образовывать любой произвольный угол α относительно положения дисбаланса (радиуса ρ ). Закрепив диск 3 на оси, будем рассматривать ρ как радиус - вектор в системе координат 4, 5, образующий угол α с осью 5. Задача сводится к определению m· ρ и α .
Сообщив диску вращение с угловой скоростью Ω , его геометрическая ось сместится на величину r0 на упругих опорах под действием центробежной силы F=m· ρ · Ω 2.
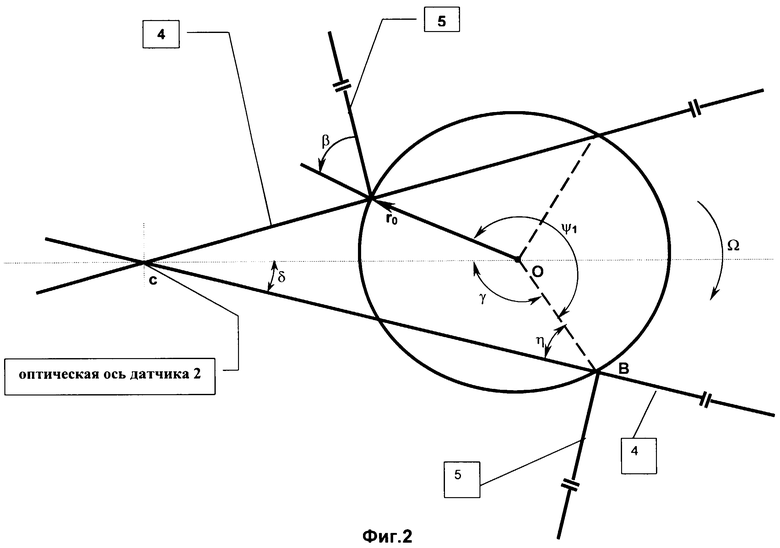
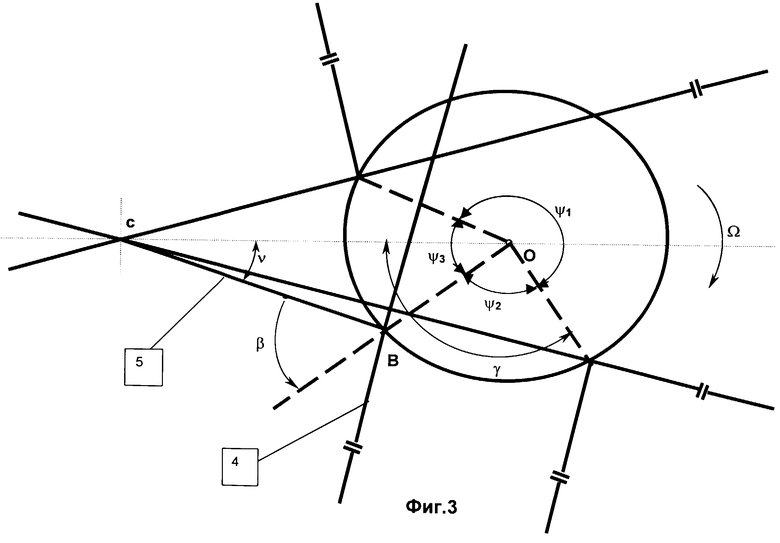
Рассматриваем r0 как радиус - вектор, ориентированный в системе координат 4, 5 на угол β . Модуль вектора |r0|определяется силой F и динамической жесткостью колебательной системы. Вместе с диском 1 на радиус - вектор r0 сместилась система координат 4, 5, которая теперь вращается по окружности радиуса r0 с угловой скоростью Ω . На фиг.1 пунктиром показано положение системы координат 4, 5 при ее смещении на вектор r0. Ось 4 пересекает световой поток конечного выключателя 6. Его сигнал включает систему измерения интервалов времени, т.е. датчик 2 и таймер. При пересечении осью 4 датчика 2, его сигнал запускает таймер на измерение времени (фиг.2). Повернувшись на угол Ψ 1, ось 4 короткой стороной опять пересечет датчик 2 и остановит счет времени. Таким образом определился интервал времени Δ t1. Одновременно этот же сигнал датчика 2 служит командой на начало нового измерения времени. Продолжая далее поворот на угол ψ 2, система координат осью 5 пересечет оптическую ось датчика 2 и остановит этот счет. Получен интервал времени Δ t2. Одновременно запускается новый счет (фиг.3). Затем система координат поворачивается на угол ψ 3. Ось 4, пересекая датчик 2, остановит счет времени. Получен третий интервал Δ t3. Сумма этих интервалов - это время одного полного оборота, т.е. 2π радиан. Отсюда определяется скорость Ω вращения ротора
Ω =2π /(Δ t1+Δ t2+Δ t3) (1)
Зная Ω , определяем величины углов ψ i, на которые последовательно поворачивалась система координат 4, 5
Ψ i=Ω · Δ ti (i=1, 2, 3) (2)
Углы ψ 1 и ψ 2 полностью определяют радиус - вектор r0, его модуль и фазу, т.е. амплитуду и фазу колебаний диска от действия дисбаланса. Действительно, рассмотрим на фиг.2 треугольник ОВС. В нем все углы определяются однозначно, если известен угол ψ 1. Легко показать, что: η =(π /2-β ); δ =-(π /2-ψ 1/2); γ =(π +β -ψ 1/2). Сторона ОС Δ СОВ равна L. Тогда по теореме синусов получим
sinη /L=cosβ /L=sinδ /r0=-cos(Ψ 1/2)/r0. (3)
Рассмотрим на фиг.3 Δ СОВ. Угол СОВ=γ -ψ 2; υ =-(π -(ψ 1/2+ψ 2)). По теореме синусов для Δ СОВ получим
sinβ /L=-sin(Ψ 2+Ψ 1/2)/r0 (4)
Из уравнений (3) и (4) легко определяются β и r0
β =arctg(sin(Ψ 2+Ψ 1/2)/cos(Ψ 1/2), (5)

Формулы верны независимо от того, в каком квадранте системы координат расположен вектор r0.
Таким образом, получен радиус-вектор r0 в системе координат 4, 5, характеризующий амплитуду и фазу колебаний балансируемого диска от исходной неуравновешенности.
Дальнейший алгоритм действий повторяет известный "метод максимальных отметок", описанный в [1] (стр.25).
Необходимо отметить, что угол β из формулы (5) определяется неоднозначно. Однако фактические значения углов ψ 1, ψ 2, ψ 3 позволяют его доопределить. Действительно, если радиус-вектор r0 находится в первом квадранте системы координат 4, 5, то
Ψ 1>π ; Ψ 2>π /2; Ψ 3<π /2. (7)
Если во втором квадранте, то
Ψ 1<π ; Ψ 2>π /2; Ψ 3>π /2, (8)
в третьем
Ψ 1<π ; Ψ 2<π /2; Ψ 3>π /2, (9)
в четвертом
Ψ 1>π ; Ψ 2<π /2; Ψ 3>π /2. (10)
Значения функции tg могут быть одни и те же, если β находится в первом или третьем квадранте. Аналогично для второго и четвертого квадрантов. Соотношения (7)-(10) позволяют однозначно определить угол β .
Таким образом, в данном способе предлагается измерять только интервалы времени, что технологически выполняется наиболее просто по сравнению с измерениями любых других физических параметров (виброускорений, перемещений и пр.). Результат измерения получается сразу в цифровом виде и практически с любой степенью точности, в отличие от аналоговых сигналов, где необходима последующая дополнительная обработка, приборы и алгоритмы. К датчику положения предъявляется единственное метрологическое требование - необходимая стабильная чувствительность. Поэтому его функции может выполнять не датчик, а только чувствительный конечный выключатель.
Источник информации
Штейнвольф Л.И. Динамические расчеты машин и механизмов. М.: Машиностроение, 1961. 340 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ВЕЛИЧИНЫ И ФАЗЫ ДИСБАЛАНСА | 2006 |
|
RU2310178C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ РОТОРА ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2015 |
|
RU2592748C1 |
| СПОСОБ МОНТАЖА РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2013 |
|
RU2528789C1 |
| СПОСОБ МОНТАЖА РОТОРА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2014 |
|
RU2578500C1 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРОВ | 2013 |
|
RU2548373C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СТАТИЧЕСКОГО ДИСБАЛАНСА РОТОРА НА БАЛАНСИРОВОЧНЫХ НОЖАХ | 2015 |
|
RU2579830C1 |
| СПОСОБ ПОСТРОЕНИЯ НАПРАВЛЯЮЩЕЙ КРИВОЙ ЦИЛИНДРИЧЕСКОЙ ПОВЕРХНОСТИ РОТОРА ИЛИ КОРПУСА (ВАРИАНТЫ) | 1999 |
|
RU2163977C2 |
| СПОСОБ УСКОРЕНИЯ МАКРОЧАСТИЦ | 2013 |
|
RU2523439C1 |
| СПОСОБ АВТОНОМНОГО ОПРЕДЕЛЕНИЯ ОРБИТЫ И ОРИЕНТАЦИИ КОРПУСА КОСМИЧЕСКОГО АППАРАТА В ПРОСТРАНСТВЕ ПРИ ОТСУТСТВИИ АПРИОРНОЙ ИНФОРМАЦИИ | 2013 |
|
RU2542599C2 |
| СПОСОБ БАЛАНСИРОВКИ РОТОРА В ОДНОЙ ПЛОСКОСТИ КОРРЕКЦИИ | 2012 |
|
RU2499985C1 |
Изобретение относится к балансировочной технике и может быть использовано в конструкциях балансировочных станков. Способ определения величины и фазы дисбаланса заключается в том, что на основе измерения интервалов времени определяют пропорциональные им углы поворота ротора, определяют три последовательных угла поворота ротора, дающих в сумме полный оборот ротора, и отклоняющиеся от своих номинальных значений π, π/2 и π/2 из-за действия дисбаланса, а по фактическим величинам этих углов рассчитывают величину и фазу дисбаланса. Данное изобретение позволяет расширить номенклатуру балансируемых деталей и упростить процедуру балансировки. 3 ил.
Способ определения величины и фазы дисбаланса, заключающийся в том, что на основе измерения интервалов времени определяют пропорциональные им углы поворота ротора, отличающийся тем, что определяют три последовательных угла поворота ротора, дающих в сумме полный оборот ротора, и отклоняющиеся от своих номинальных значений π, π/2 и π/2 из-за действия дисбаланса, а по фактическим величинам этих углов рассчитывают величину и фазу дисбаланса.
| RU 94011518 A1, 20.08.1996 | |||
| Способ определения дисбаланса при динамической балансировке изделий | 1990 |
|
SU1793427A1 |
| DE 4104694 A1, 20.08.1992 | |||
| US 6098022 A, 01.08.2000 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ФРАКЦИОННОГО СОСТАВА ВЛАГИ В МАТЕРИАЛАХ | 2005 |
|
RU2296974C1 |
| US 3882730 A, 13.05.1975. | |||

