Предлагаемый способ и устройство для его осуществления относятся к области радиотехники и могут найти применение в адаптивных системах радиосвязи для дискретной обработки в режиме поиска (асинхронный прием).
Известен способ обработки с помощью дискретно-аналогового согласованного фильтра (ДАСФ), описанный в книге Варакин Л.Е. Теория систем сигналов. - М.: Советское радио, 1978 г., стр.150-151, который содержит многоотводную линию задержки, число элементов которой равно объему выборки.
Недостатком данного способа является то, что значения отсчетов и их суммирование остаются аналоговыми, поэтому при большой базе сигнала на результат будут влиять потери напряжения при "перезаписи", отклонения и нестабильность параметров элементов схем и их паразитные параметры.
Известен способ, описанный в книге Журавлев В.И. Поиск и синхронизация в широкополосных системах. - М.: Радио и связь, 1986 г., стр.92-94, в котором применена обработка, использующая метод последовательной оценки с несколькими ступенями проверки.
Недостатком данного способа является существенное возрастание времени поиска, а также технические трудности, возникающие при реализации оптимальной процедуры обработки синхросигнала с большой базой.
Наиболее близким по технической сущности к предлагаемому способу является способ, описанный в книге Пестрякова В.Б. Шумоподобные сигналы в системах передачи информации. - М.: Советское радио, 1973 г., пп.7.4 и 7.5 на стр.276-291, принятый за прототип.
В способе-прототипе производится отождествление принятой смеси элемента сигнала и помехи с одним из возможных элементов сигнала, а поскольку каждому элементу сигнала соответствует свой символ кода, то при этом происходит также и отождествление смеси элемента сигнала и помехи с одним из символов кода.
Принятая смесь элемента сигнала и помехи стробируется с частотой, в k раз превышающей тактовую частоту. Далее полученная последовательность k· N (N - объем кода) решений отождествляется с кодами используемых сигналов S1,..., SM с учетом фиксированного порога распознавания. На основе полученных оценок тождественности принимается гипотеза о действии сигнала Si(i=1,..., М).
В способе-прототипе для уменьшения потерь энергии сигнала количество решений, принимаемых на интервале каждого элемента сигнала, увеличено до k. Однако для данного способа обработки полученной последовательности k· N (N-объем кода) решений требуется объем, равный k· N ячеек (N - объем кода), что ведет к значительному усложнению схемы фильтра при незначительном выигрыше в энергии сигнала.
Кроме того, в способе-прототипе порог распознавания h, определяющий максимально разрешенное число ошибок в принимаемой последовательности, является постоянной величиной. Однако при конечном значении энергии сигнала и наличии случайного шума принятие решения о наличии или отсутствии сигнала всегда сопровождается ошибками двух видов:
- несмотря на отсутствие сигнала, под действием шума дискретный согласованный фильтр (ДСФ) принимает неправильное решение о наличии сигнала (ошибка первого рода – Рл),
- хотя сигнал присутствует, но число ошибочных решений превосходит h, и принимается ошибочное решение об отсутствии сигнала (ошибка второго рода - 1-Рпр).
В связи с этим оптимальный приемник должен найти наилучший способ приема, минимизирующий обе вероятности ошибки согласно определенному критерию. В качестве такого критерия целесообразно использовать критерий минимального среднего риска

здесь Ротс.сигн - априорная вероятность отсутствия сигнала;
Рнал.сигн - априорная вероятность наличия сигнала;
а и b - весовые коэффициенты, зависящие от того, насколько опасна Рл по сравнению с 1-Рпр.
Для определения вероятности обнаружения синхросигнала Рпр необходимо знать вероятность правильного распознавания элемента синхросигнала р. Поскольку объем анализируемой последовательности решений равен N и сами решения в этой последовательности независимы, то вероятность того, что последовательность решений совпадает с кодом в i позициях, определяется биномиальным законом

и вероятность обнаружения N-элементного синхросигнала определяется выражением

Как видно из (3), регулирование порога t будет способствовать адаптации на приеме к изменениям условий окружающей среды и требований к системе. Поэтому перед началом сеанса связи целесообразно провести оценку качества сигнала. Проведенная оценка позволит определить вероятность ошибки на бит р, которая, в свою очередь, даст возможность адаптивно регулировать порог распознавания h. Подобное адаптивное регулирование порога распознавания аналогично работе системы с положительной обратной связью: минимизация вероятности самовозбуждения системы (появления выходного сигнала при отсутствии сигнала на входе) и максимизирование вероятности того, что при определенных условиях цепь обратной связи становится неустойчивой, и в ней возникают автоколебания.
Учитывая это, с целью введения адаптации описанного выше способа обработки синхросигнала к изменениям помеховой обстановки и уменьшения потерь информации, а также упрощению процедуры обработки сигналов с большой базой предлагается модифицировать его следующим образом.
Для устранения указанных недостатков в способе, заключающемся в том, что принятая смесь элемента сигнала и помехи стробируется с частотой, в k раз превышающей тактовую частоту, для получения последовательности, состоящей из k· N (N - объем кода) отсчетов, меняют порог распознавания при отождествлении с кодом в соответствии с контролем качества сигнала по k последовательностям, состоящим из N отсчетов, полученным разделением последовательности, состоящей из k· N отсчетов.
Предлагаемый способ заключается в том, что принятая смесь элемента сигнала и помехи стробируется с частотой, в k раз превышающей тактовую частоту. Далее полученная последовательность k· N (N - объем кода) решений разделяется на k последовательностей, каждая объемом N. Далее каждая из k последовательностей отождествляется с кодами используемых сигналов S1,..., SM с учетом порога распознавания h. Полученные оценки тождественности каждой из k последовательностей определяют порог распознавания h и служат основанием для принятии гипотезы о действии сигнала Si (i=1,..., М).
В качестве примера предположим, что ДСФ производит обнаружение синхросигнала в реальном масштабе времени методом равномерного стробирования каждого условного бита информации в k=8 точках.
В качестве синхросигнала используется двоичная 31-элементная М-последовательность заданного вида и на заданной скорости. Вид последовательности задается путем выстраивания последовательности триггерных ячеек в регистре сдвига. Скорость обрабатываемой информации определяется тактовой частотой ГТИ.
Схема принятия решения: при совпадении не менее 3-х подряд последовательностей (из полученных k=8) с копией сигнала (с допуском до h ошибок для каждой последовательности) выносится решение о приеме синхросигнала.
Графики для Рпр и Рл представлены на фиг.3 и 4. На фиг.3. представлена зависимость вероятности ошибки первого рода (вероятности ложной тревоги) от порога ДСФ. На фиг.4 представлена зависимость вероятности обнаружения от вероятности ошибки на бит. На фиг.5 изображена зависимость среднего риска от вероятности ошибки на бит.
Из анализа фиг.3 следует, что стандартной вероятности ложной тревоги Pл≤10-9 удовлетворяет работа ДСФ с порогом h≤ 6. Следовательно, если установить допустимую Рпр≥0.99, то из анализа фиг.4 следует, что при приеме ДСФ М-последовательности с N=31 значение вероятности ошибки на бит p должно быть в пределах от 0 до 0.08. Как указывалось выше, в качестве критерия выбора порога ДСФ h служит критерий минимального среднего риска Rср. Графики для Rср представлены на фиг.5. (Здесь для расчетов по формуле(1) приняты Ротс.сигн=0.9 и Рнал.сигн=0.1, отношение а/b=0.001).
Анализируя фиг.5, можно определить режим работы ДСФ: если АПО на основе анализа качества сигнала путем подсчета числа совпадений определяет вероятность ошибки р в пределах от 0 до 0.002, то ДСФ работает с порогом h=4; если p в пределах от 0.002 до 0.01, то h=5; если p в пределах от 0.01 до 0.08, то h=6. При превышении p значения 0.08 ДСФ перестает удовлетворять условиям Рл≤10-9 и Рпр≥0.99 и система перестает работать.
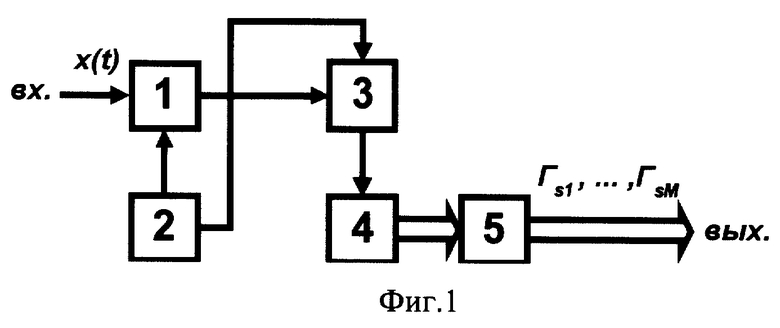
Наиболее близким по технической сути к предлагаемому устройству является устройство, описанное в книге Пестрякова В.Б. Шумоподобные сигналы в системах передачи информации. - М.: Советское радио, 1973 г., стр.283, рис. 7.5.1, принятый за прототип, в котором последовательность случайных элементов смеси x1(t), x2(t),..., xN(t) преобразуется в случайную последовательность решений о символах, соответствующих принятым элементам сигнала β 1, β 2,..., β N, и решение по приему синхросигнала осуществляется на основе анализа случайной последовательности решений, а не непосредственного анализа реализации смеси сигнала и помехи.
Функциональная схема устройства-прототипа представлена на фиг.1, где приняты следующие обозначения::
1 - решающее устройство (РУ);
2 - генератор тактовых импульсов (ГТИ);
3 - регистр сдвига (PC);
4 - сумматор-дешифратор сигнала (С-Д);
5 - компаратор.
Устройство-прототип содержит последовательно соединенные РУ 1, PC 3, С-Д 4 и компаратор 5, а также ГТИ 2, первый выход которого соединен со вторым входом РУ 1, второй выход - со вторым входом PC 3, при этом вход РУ 1 является входом устройства, а выход компаратора 5 - выходом устройства.
Устройство прототип работает следующим образом. Непрерывное радиочастотное колебание, переведенное в область видеочастот, поступает на РУ 1. В РУ 1 производится квантование (дискретизация) сигнала по времени и по амплитуде на два уровня 1 и 0. РУ 1 принимает решение о знаке непрерывного колебания в момент отсчета. ГТИ 2 квантует в РУ 1 сигнал по времени с частотой в k раз превышающей тактовую частоту и управляет работой ДСФ в целом, PC 3 является дискретной линией задержки и, фактически, блоком хранения эталонного сигнала. С каждым тактом выборочные значения продвигаются на единицу времени задержки, равную интервалу квантования по времени. PC 3 представляет собой последовательность триггерных ячеек, каждая из которых имеет два выхода: 1 (прямой) и 0 (инверсный). Производя сложение в С-Д 4 с различных выходов триггеров можно получить различные импульсные характеристики ДСФ, т.е. согласовывать его с кодами используемых сигналов. Напряжение с выходов С-Д 4 поступает в компаратор 5, где результаты согласования сравниваются с порогом распознавания h=const. На основе полученных оценок сравнения принимается гипотеза о действии сигнала Si (i=1,..., М)-Гsi.
При использовании ДСФ потери в достоверности сигнала неизбежны и определяются особенностями его работы. Определим эти потери в случае обнаружения и распознавания синхросигнала при действии нормальной шумовой помехи.
Рассмотрим прохождение сигнала, помехи и смеси сигнала и помехи через ДСФ. При действии сигнала без помех РУ 1 вырабатывает последовательность решений, которая совпадает с кодом ожидаемого сигнала. В момент появления сигнала в PC 3 будут вводиться правильные решения и отклик ДСФ будет определяться функцией автокорреляции (ФАК) сигнала, а также функцией взаимной корреляции (ФВК) части сигнала и последовательности нулей и единиц, записанной в регистрах сдвига в исходном состоянии. В момент, когда k· N правильных решений запишутся в регистры сдвига, на все входы сумматора будут поступать единицы, и отклик фильтра равен k· N.
При действии одной помехи напряжение на выходе фильтра РУ 1 является случайной величиной, которая с равной вероятностью может принимать как положительное, так и отрицательное значение. Поэтому на выходе РУ 1 в этом случае действует случайная последовательность решений, никак не связанная с кодом сигнала. Она, заполняя PC 3, приводит в случайное состояние его триггеры, что обуславливает случайность выходного напряжения ДСФ.
Если же на входе ДСФ действует смесь сигнала и помехи, то РУ 1 вырабатывает тем больше ошибочных решений, чем меньше отношение сигнал/помеха на входе фильтра. Это приводит к тому, что последовательность решений уже не соответствует коду сигнала. Напряжение на выходе ДСФ имеет случайные отклонения относительно ФАК сигнала и наблюдается уменьшение основного выброса. В этом случае при принятии решения по распознаванию элементов синхросигнала используется информация о сигнале, содержащаяся в фазе и амплитуде смеси сигнала и помехи, поскольку величина напряжения на входе схемы принятия решения определяется как фазой, так и амплитудой. Однако при этом все же имеются потери информации. Они обусловливаются тем, что напряжение, действующее на выходе фильтра РУ 1, квантуется только на два уровня.
В связи с вышесказанным, принятие решения о наличии или отсутствии сигнала всегда сопровождается ошибками двух видов:
- несмотря на отсутствие сигнала, под действием шума ДСФ принимает неправильное решение о наличии сигнала (ошибка первого рода – Рл),
- хотя сигнал присутствует, но число ошибочных решений превосходит h и принимается ошибочное решение об отсутствии сигнала (ошибка второго рода - 1-Рпр).
Повторяя рассуждения, приведенные выше, можно сделать вывод о том, что необходимо ввести адаптивное регулирование порога t путем оценки качества канала связи. С целью введения адаптации данного устройства к изменениям помеховой обстановки и уменьшения потерь информации предлагается модифицировать данное устройство следующим образом.
Для устранения указанных недостатков в устройство, содержащее решающее устройство, первый вход которого является входом устройства, последовательно соединенные регистр сдвига и сумматор-дешифратор, а также компаратор, выход которого является выходом устройства, и генератор тактовых импульсов, первый выход которого соединен со вторым входом решающего устройства, введены линия задержки, k запоминающих устройств, k ключей, последовательно соединенные компаратор с управляемым порогом и счетчик, последовательно соединенные микропроцессор и регистр памяти, при этом выход решающего устройства соединен с объединенными входами k запоминающих устройств, выходы которых соединены с первыми входами соответствующих k ключей, выходы которых объединены и подключены к первому входу регистра сдвига, второй выход генератора тактовых импульсов подключен к входу линии задержки, первый выход которой соединен со входами синхронизации k запоминающих устройств и k ключей, а второй выход линии задержки соединен со вторым входом регистра сдвига, выход сумматора-дешифратора соединен с первым входом компаратора с управляемым порогом, выход которого соединен с входом микропроцессора, выход регистра памяти соединен со вторым входом компаратора с управляемым порогом выход счетчика соединен с входом компаратора.
Функциональная схема предлагаемого устройства представлена на фиг.2, где приняты следующие обозначения:
1 - решающее устройство (РУ);
2 - генератор тактовых импульсов (ГТИ);
3 - линия задержки (ЛЗ);
41,..., 4k - запоминающие устройства (ЗУ);
51,..., 5k - ключи;
6 - регистр сдвига (PC);
7 - сумматор-дешифратор сигнала (С-Д);
8 - компаратор с управляемым порогом (КУП);
9 - микропроцессор;
10 - регистр памяти (РП);
11 - счетчик;
12 - компаратор.
Предлагаемое устройство содержит РУ1, первый выход которого соединен с объединенными первыми входами ЗУ 41...k, выходы которых соединены с первыми входами ключей 51…k, объединенные выходы которых соединены с первым входом PC 6. Последовательно соединенные С-Д7, КУП 8, счетчик 11 и компаратор 12, выход которого является выходом устройства. При этом первый выход ГТИ 2 соединен со вторым входом РУ 1, а второй выход ГТИ 2 - с входом ЛЗ 3, первый выход которой соединен со входами синхронизации k запоминающих устройств и k ключей, а второй выход соединен со вторым входом PC 6, выход которого подсоединен к входу С-Д 7. Последовательно соединенные микропроцессор 9 и РП 10, выход которого соединен со вторым входом КУП 8, выход которого подключен к входу микропроцессора 9. Вход РУ 1 является входом устройства.
Предлагаемое устройство работает следующим образом.
Непрерывное радиочастотное колебание, переведенное в область видеочастот, поступает на РУ 1. В РУ 1 производится квантование (дискретизация) сигнала по времени и по амплитуде на два уровня 1 и 0. РУ 1 принимает решение о знаке непрерывного колебания в момент отсчета. ГТИ 2 квантует в РУ 1 сигнал по времени с частотой, в k раз превышающей тактовую частоту, и управляет работой ДСФ в целом. Сигнал с ГТИ 2, кроме того, поступает еще на ЛЗ 3, где вырабатывается набор тактовых импульсов, следующих с частотой информации, но сдвинутых относительно друг друга на время δ =Т/k, где Т - длительность бита информации, а k определяется ГТИ 2. Информационная последовательность с блока РУ 1 поступает, кроме того, на первые входы ЗУ 41...k, где записывается с помощью соответствующих тактовых импульсов с ЛЗ 3. Этим осуществляется дискретизация по времени каждого бита принимаемой информации и в ЗУ 41...k записываются отсчеты отрезка информации. При этом число отсчетов, которое берется на одном бите информации, определяется ГТИ 2 и равно k, а длительность отрезка информации определяется длиной (разрядностью N) отдельного регистра блока ЗУ 41...k. Записанные в ЗУ 41...k отсчеты сигнала поступают затем через ключи 51…k, открывающиеся через соответствующие промежутки времени, определяемые набором сдвинутых по времени тактовых импульсов с ЛЗ 3 на блок PC 6.
PC 6 является дискретной линией задержки и, фактически, блоком хранения эталонного сигнала. С каждым тактом выборочные значения продвигаются на единицу времени задержки, равную интервалу квантования по времени. PC 6 представляет собой последовательность триггерных ячеек, каждая из которых имеет два выхода: 1 (прямой) и 0 (инверсный). Производя сложение в С-Д 7 с различных выходов триггеров можно получить различные импульсные характеристики ДСФ, т.е. согласовывать его с кодами используемых сигналов. Напряжение с выходов С-Д 7 поступает в КУП 8, где результаты согласования сравниваются с параметром КУП 8, соответствующим порогу распознавания h.
Таким образом, на выходе С-Д 7 постоянно (с периодом δ ) формируется результат сравнения k групп однотипных отсчетов (по N отсчетов в каждой) с эталонными сигналами, длиной N бит, хранящимися в блоке С-Д 7. Результаты сравнения группами по k значений, соответствующих отрезку обрабатываемой информации длиной в N бит, непрерывно (с периодом Т) поступают в микропроцессор 9, где определяется вероятность правильного распознавания элемента сигнала и значение порога распознавания h. Порог, определенный в микропроцессоре 9, поступает в РП 10, который формирует сигнал, изменяющий значение параметра в КУП 8. На основании результатов сравнения в С-Д 7 счетчик 11 подсчитывает для каждого эталонного сигнала число групп однотипных отсчетов (по N отсчетов в каждой), удовлетворяющих порогу h. М полученных в счетчике 11 значений (для каждого эталонного сигнала) поступают в компаратор 12, где сравниваются с параметром компаратора, выбранному с учетом критерия оптимальности. Таким образом, на выходе компаратора 12 формируется оценка о приеме для каждого эталонного сигнала. На основе полученных оценок принимается гипотеза о действии сигнала Si (i=1,..., М)-Гsi.
Предлагаемое устройство реализуется физически на базе элементов и блоков, широко известных из технической литературы.
Алгоритм работы предлагаемого устройства позволяет избежать трудностей при обработке сигналов с большой базой. Данное устройство по своей сути является полностью цифровым устройством. Применение цифровых элементов позволяет: упростить техническое исполнение устройства; значительно уменьшить габариты изделия, в котором оно будет использоваться, а также уменьшить его стоимость; повысить надежность в плане снижения влияния нестабильности параметров элементов схем и их паразитных параметров.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИСКРЕТНЫЙ СОГЛАСОВАННЫЙ ФИЛЬТР | 2005 |
|
RU2310978C2 |
| Цифровой некогерентный демодулятор сигналов с амплитудно-четырехпозиционной фазовой манипуляцией | 2021 |
|
RU2761521C1 |
| Цифровой демодулятор сигналов с двухуровневой амплитудно-фазовой манипуляцией и относительной оценкой амплитуды символа | 2022 |
|
RU2790140C1 |
| СТАРТСТОПНАЯ СИСТЕМА СВЯЗИ С ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ СИГНАЛА | 2008 |
|
RU2357372C1 |
| СТАРТСТОПНАЯ СИСТЕМА СВЯЗИ | 2009 |
|
RU2396722C1 |
| СТАРТСТОПНАЯ СИСТЕМА СВЯЗИ | 2004 |
|
RU2270527C1 |
| Цифровой измеритель отношения сигнал/шум сигналов с фазовой манипуляцией | 2024 |
|
RU2827313C1 |
| ЦИФРОВОЙ КОГЕРЕНТНЫЙ ДЕМОДУЛЯТОР ЧЕТЫРЕХПОЗИЦИОННОГО СИГНАЛА С ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2017 |
|
RU2656577C1 |
| Цифровой демодулятор сигналов с квадратурной амплитудной манипуляцией | 2015 |
|
RU2628427C2 |
| ЦИФРОВОЙ ДЕМОДУЛЯТОР СИГНАЛОВ С АМПЛИТУДНО-ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 2022 |
|
RU2786159C1 |
Изобретение относится к области радиотехники и может найти применение в адаптивных системах радиосвязи для дискретной обработки в режиме поиска (асинхронный прием). Технический результат – сокращение времени поиска. Для этого в способе принятая смесь элемента и помехи стробируется с частотой, в k раз превышающей тактовую частоту, для получения последовательности, состоящей из k·N (n – объем кода) отсчетов, меняют порог распознавания при отождествлении с кодом в соответствии с контролем качества сигнала по k последовательностям, состоящим из N отсчетов, полученным разделением последовательности, состоящей из k·N отсчетов. В устройство введены линия задержки, k запоминающих устройств, k блоков ключей, последовательно соединенные компаратор с управляемым порогом и счетчик, последовательно соединенные микропроцессор и регистр памяти. 1 з. п. ф–лы, 5 ил.
| ПЕСТРЯКОВ В.Б | |||
| Шумоподобные сигналы в системах передачи информации/ - М/: Советское радио, 1973, с.276-291, рис | |||
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| ВАРАКИН Л.Е | |||
| Теория систем сигналов | |||
| - М.: Советское радио, 1978, с.150 и 151 | |||
| ЖУРАВЛЕВ В.И | |||
| Поиск и синхронизация в широкополосных системах связи | |||
| - М.: Радио и связь, 1986, с.92-94 | |||
| RU 92003975, А, 27.02.1995 | |||
| СИСТЕМА ПЕРЕДАЧИ ИНФОРМАЦИИ | 1993 |
|
RU2038634C1 |

