Предлагаемый способ относится к области машиностроения и может быть применен в конструкциях цикловых промышленных роботов и манипуляторов, используемых для автоматизации и механизации основных и вспомогательных операций в промышленности.
Известен способ, при котором подпитка энергией привода колебательного типа осуществляется во время перемещения рабочего органа.
Повышение быстродействия при данном способе ограничено, с одной стороны, трудностью расчета необходимого количества подкачиваемой энергии, а с другой стороны, техническими характеристиками устройств, реализующих данный способ, например, электродвигатель (см. А.с. №1219341, кл. В 25 J 18/00, бюл. №4, 1986 г.)
Известен способ, когда подпитка энергией в привода колебательного типа происходит на определенных участках движения рабочего органа (Сысоев С.Н., Егоров И.Н., Черкасов Ю.В. Методы позиционирования исполнительного органа на жесткий упор // Станки и инструмент. - 1990. - №8. - С.12). Это достигается добавлением энергии в процессе принудительного вывода рабочего органа в точку позиционирования и в момент расфиксации рабочего органа. Данный способ реализуется устройством (см. А.с. №2065354, кл. В 25 J 18/00, 9/12, бюл. №23, 1996 г., “Механическая рука”). В данном механизме устройства позиционирования рабочего органа выполнены в виде постоянных магнитов, подпитка энергией системы осуществляется при помощи магнитных сил. Во время расфиксации рабочего органа магнитные силы отталкивают его, а при позиционировании дотягивают рабочий орган в точку позиционирования.
Недостатком данного способа является то, что подпитка энергией привода производится на небольшом участке движения рабочего органа, что снижает точностные характеристики и тем самым ограничивает потенциальные скоростные характеристики привода. Кроме этого устройства позиционирования и подпитки энергии требуют точной настройки и не допускают значительных отклонений от многочисленных параметров привода, к которым относятся и масса перемещаемых предметов, нестабильность сил трения, значительные динамические нагрузки и др.
Наиболее близким по технической сущности из известных является способ подпитки энергии, включающий предварительную настройку привода рабочего органа на требуемое положение статического равновесия рабочего органа и добавление энергии для движения рабочего органа (SU 1664546 А1, B 23 J 11/00, 23.07.1991, “Модуль линейного перемещения промышленного робота”, бюл. №27, 1991 г.).
Точностные характеристики привода подпитки энергии, его динамические воздействия на систему определяют ошибку добавления энергии и являются одним из определяющих критериев получения максимального быстродействия и надежности работы.
Приводы колебательного типа широко применяются в манипуляционных механизмах загрузки заготовок в основное технологическое оборудование. Время работы данных механизмов является вспомогательным. Уменьшение данного вспомогательного времени возможно уменьшением времени нахождения рабочего органа в рабочей зоне основного технологического оборудования. В данное время входит и время подпитки энергией привода.
Задачей предлагаемого изобретения является повышение быстродействия за счет устранения операции добавления энергии приводу для возврата рабочего органа в исходное положение..
Поставленная задача достигается тем, что добавление энергии производят для движения рабочего органа в одном направлении из исходного положения, а предварительную настройку привода рабочего органа осуществляют на положение статического равновесия, смещенное в направлении, противоположном направлению движения рабочего органа из исходного положения, на величину, которую определяют в соответствии с величиной добавляемой энергии из условия получения дополнительной энергии, необходимой для перемещения рабочего органа в исходное положение.
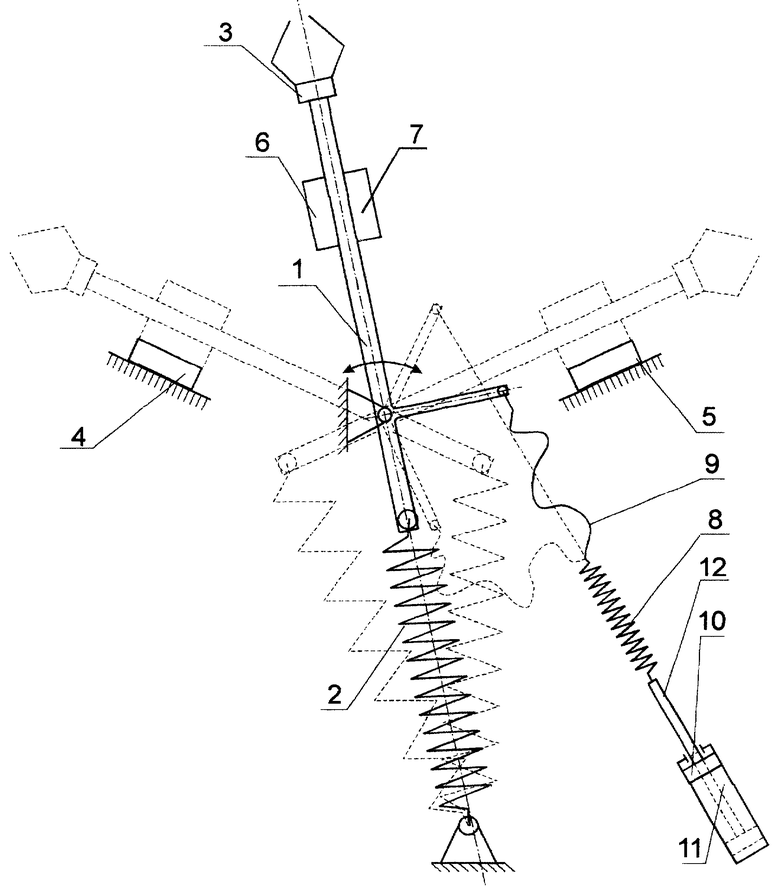
Данный способ, например, может быть реализован устройством подпитки энергии в угловой привод колебательного типа (см. чертеж).
Устройство содержит рабочий орган 1, шарнирно установленный в корпусе и подпружиненный силовой пружиной 2 и несущий на себе захват 3, фиксаторы крайних положений 4, 5 рабочего органа, а также устройства расфиксации (на чертеже не показаны), на рабочем органе 1 установлены ответные элементы 6, 7 с возможностью взаимодействия с фиксаторами 4, 5 в крайних положениях, а также дополнительную пружину 8, связанную с рабочим органом с помощью гибкого троса 9, поршень 10 силового цилиндра 11 через шток 12 связан с дополнительной пружиной 8, силовой цилиндр выполнен с возможностью регулировки длины хода поршня.
Работает устройство следующим образом.
Перед началом работы производят предварительную настройку привода. Рабочий орган 1 выводят в крайнее левое исходное положение. В данном положении оно удерживается устройством фиксации 4, 6. Длина троса 9 выбрана таким образом, что он натянут, а дополнительная пружина 8 находится в ненагруженном состоянии равновесия. Затем рабочий орган 1 выводят в крайнее правое положение, в котором он удерживается устройством фиксации 5, 7. Далее смещают положение статического равновесия рабочего органа 1 в сторону его исходного положения путем изменения заделки пружины 2, добавляя в статике в привод энергию. Величину данного смещения определяют в соответствии с величиной добавляемой энергии из условия получения приводом дополнительной энергии, необходимой для перемещения рабочего органа в исходное положение.
При этом силовая пружина 2 растягивается и запасает энергию, необходимую для перемещения рабочего органа из данного крайнего положения в исходное.
Затем рабочий орган 1 перемещают в крайнее левое (исходное) положение, фиксируют устройством фиксации 4, 6 и настраивают ход поршня 10 силового цилиндра 11, величину натяжения дополнительной пружины 8 из условия добавления энергии в привод, достаточной для перемещения рабочего органа 1 из исходного положения в крайнее правое положение.
При подаче команды из системы управления на начало работы привода поршень 10 цилиндра 11, связанного штоком 12 с пружиной 8, под действием давления в верхней полости цилиндра 11 перемешается вниз, при этом пружине 8 сообщается потенциальная энергия. После того как дополнительная пружина 8 накопила дополнительную энергию, служащую для компенсации диссипации в системе, из системы управления подается команда на расфиксацию рабочего органа 1, который начинает перемещаться из левого (исходного) положения в правое. Потенциальная энергия основной пружины 2 и дополнительной пружины 8 переходит в кинетическую энергию движения рабочего органа 1. После прохождения среднего положения начинается торможение рабочего органа 1 и кинетическая энергия пружины 8 и рабочего органа 1 переходит в потенциальную энергию основной пружины 2, тем самым пружина 2 запасает энергию, необходимую для перемещения рабочего органа 1 в крайнее левое положение. Так как ось силовой пружины 2 смещена относительно оси рабочего органа 1 вправо, то в крайнем правом положении рабочего органа 1 пружина 2 растягивается больше, чем в крайнем левом (исходном) положении, что позволяет накопить дополнительную энергию, необходимую для компенсации потерь энергии при движении рабочего органа 1 из правого крайнего положения в левое (исходное). После позиционирования рабочего органа 1 в крайнем правом положении трос 9 остается натянутым, а дополнительная пружина 8, отдав всю свою энергию в систему, выходит в положение статического равновесия.
Для осуществления обратного хода рабочего органа 1 поршень 10 цилиндра 11 перемещается в верхнее исходное положение, взаимодействуя через шток 12 и пружину 8 с тросом 9, ослабляя натяжение которого таким образом, чтобы при выходе рабочего органа 1 в крайнее левое (исходное) положение трос 9 натянулся, а пружина 8 осталась в равновесии. После этого рабочий орган 1 расфиксируется и начинает перемещаться влево.
Таким образом подкачка энергии в систему осуществляется при помощи дополнительной пружины 8 в статике только в крайнем левом (исходном) положении рабочего органа. При помощи регулирования натяжения дополнительной пружины 8 корректируется количество энергии, добавляемой в систему.
Предлагаемый способ подпитки энергией привода колебательного типа позволяет устранить операцию добавления энергии приводу для возврата рабочего органа в исходное положение, снизить вспомогательное время на подпитку энергией привода, тем самым повысить быстродействие привода.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАБОТЫ ПРИВОДА С РЕКУПЕРАЦИЕЙ МЕХАНИЧЕСКОЙ ЭНЕРГИИ | 2004 |
|
RU2266191C1 |
| ПОВОРОТНЫЙ ПРИВОД ЗВЕНА РЕЗОНАНСНОЙ МЕХАНИЧЕСКОЙ РУКИ | 2003 |
|
RU2271273C2 |
| ПРИВОД КОЛЕБАТЕЛЬНОГО ТИПА | 2007 |
|
RU2348510C2 |
| СПОСОБ ДИНАМИЧЕСКОГО ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНОГО ИСПОЛНИТЕЛЬНОГО ОРГАНА | 1993 |
|
RU2074086C1 |
| Модуль линейного перемещения промышленного робота | 1989 |
|
SU1664546A1 |
| МЕХАНИЧЕСКАЯ РУКА | 1993 |
|
RU2065354C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 1994 |
|
RU2079401C1 |
| Способ позиционирования подвижного исполнительного органа | 1981 |
|
SU992126A1 |
| ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2397857C2 |
| УСТРОЙСТВО ДЛЯ ВОЗБУЖДЕНИЯ КОЛЕБАНИЙ | 2006 |
|
RU2327533C1 |
Изобретение относится к области машиностроения и может быть использовано в конструкциях цикловых промышленных роботов и манипуляторов, применяемых для автоматизации и механизации основных и вспомогательных операций в промышленности. Производят предварительную настройку привода рабочего органа на требуемое положение статического равновесия рабочего органа и добавление энергии для движения рабочего органа при статическом положении последнего. Энергию добавляют для движения рабочего органа в одном направлении из исходного положения. Предварительную настройку привода рабочего органа осуществляют на положение статического равновесия, смещенное в направлении, противоположном направлению движения рабочего органа из исходного положения. Величину смещения определяют в соответствии с величиной добавляемой энергии из условия получения дополнительной энергии, необходимой для перемещения рабочего органа в исходное положение. В результате обеспечивается повышение быстродействия за счет устранения операции добавления энергии приводу для возврата рабочего органа в исходное положение. 1 ил.
Способ подпитки энергией привода колебательного типа, включающий предварительную настройку привода рабочего органа на требуемое положение статического равновесия рабочего органа и добавление энергии для движения рабочего органа при статическом положении последнего, отличающийся тем, что добавление энергии производят для движения рабочего органа в одном направлении из исходного положения, а предварительную настройку привода рабочего органа осуществляют на положение статического равновесия, смещенное в направлении, противоположном направлению движения рабочего органа из исходного положения, на величину, которую определяют в соответствии с величиной добавляемой энергии из условия получения дополнительной энергии, необходимой для перемещения рабочего органа в исходное положение.
| Модуль линейного перемещения промышленного робота | 1989 |
|
SU1664546A1 |
| МЕХАНИЧЕСКАЯ РУКА | 1993 |
|
RU2065354C1 |
| УСТРОЙСТВО ДЛЯ ДЕКОДИРОВАНИЯ ДИСКРЕТНЫХ СИГНАЛОВ, РАСПРОСТРАНЯЮЩИХСЯ В МНОГОЛУЧЕВОМ КАНАЛЕ | 2014 |
|
RU2560102C2 |

