Изобретение относится к области машиностроения, роботостроения и может применяться для перемещения заготовок или деталей между технологическим оборудованием. Особенно эффективно применение устройства для обслуживания высокопроизводительного оборудования, например, в холодной листовой штамповке, а также при выполнении технологических операций укладки изделий в тару.
По типу привода предлагаемое устройство относится к цикловым приводам колебательного, маятникового, резонансного типа с рекуперацией механической энергии (см. «Манипуляционные системы роботов» под ред. А.И.Корендясева, М., Машиностроение, 1989, с.216-263). В данных устройствах используется безударный способ позиционирования, позволяющий значительно повысить быстродействие и снизить энергозатраты механизмов (см. Патент РФ №992126 «Способ позиционирования подвижного исполнительного органа», Сысоев С.Н., Черкасов Ю.В., опубл. БИ №4, 1983 г.).
Известны приводы (см. Бабицкий, В.И., Ковалева А.С. Оптимальное управление в резонансных манипуляционных системах, М., Наука, журнал Машиностроение, 1986, №2, с.21; журнал «Станки и инструмент», Акинфиев Т.С., Бабицкий В.И., Кондратьев B.C., Юрченков М.Ф. Быстродействующий резонансный манипулятор, М., Машиностроение, №2, 1986, с.9-11), в которых звено механической руки подпружинено в корпусе привода в среднем положении и представляет собой маятник. Фиксация его в крайних положениях на жесткие упоры производится при скорости его перемещения, близкой к нулю.
Недостатками данных устройств являются наличие при позиционировании исполнительного органа на жесткий упор удара второго рода, а также низкая надежность позиционирования, ограничивающие возможность повышения быстродействия данных механизмов.
Известно устройство, (см. Патент РФ №1664546 «Модуль линейного перемещения промышленного робота», Сысоев С.Н., Черкасов Ю.В.). Данное устройство состоит из каретки, установленной в корпусе с возможностью перемещения по направляющим и подпружинено в среднем положении. Устройство позиционирования каретки в крайних положениях на жесткие упоры выполнено в виде гибких лент, один конец которых кинематически связан с кареткой, а другой с корпусом, имеющих возможность прилегания в крайних положениях каретки к плоской магнитной плите.
Недостатком данного устройства является трудность реализации звена механической руки поворотного типа, значительное влияние движений лент на динамические процессы устройства, ограничивающие быстродействие.
Наиболее близким по технической сущности из известных является привод колебательного типа (см. Патент РФ, №2065354, Сысоев С.Н., Черкасов Ю.В., Глушков А.А., Трофимов М.М., МПК B25J 18/00, 9/12, БИ №23, 1996 г.). Привод включает корпус с установленными на нем упорами, поворотное звено механической руки, выполненное в виде маятника, и снабжен устройством позиционирования. Принудительный вывод в требуемое положение и фиксация звена производится путем использования магнитных полей постоянных магнитов, установленных как на подвижном звене механической руки, так и в обслуживаемых позициях.
Организация принудительного вывода поворотного звена в требуемую точку позиционирования не обеспечивает в полной мере безударное позиционирование механической руки. Влияние погрешности количества добавляемой энергии в привод, воздействие внешних факторов приводят к низкой надежности позиционирования поворотного звена механической руки.
Задачей, решаемой изобретением, является повышение надежности позиционирования привода путем коррекции добавляемой в систему энергии.
Анализ работы привода колебательного типа показал, что для всех штатных ситуаций их работы существует следующая закономерность физических явлений: при подходе поворотного звена к зоне позиционирования его угловая скорость снижается до «безударной». При скорости движения больше «безударной» возникает внештатная ситуация, приводящая к сбою работы привода. Данную закономерность можно использовать в качестве информационного потока для управления работой привода. Кроме этого, при создании высокоэффективной структуры устройства в целом необходимо стремиться к симбиозу максимального количества информационных и энергетических потоков (см. Сысоев С.Н. Нахождение технических решений методом исследования функционально-физических связей. Тезисы доклада на 4-м международном конгрессе "Конструкторско-технологическая информатика 2000", Москва, МГТУ «СТАНКИН», 2000 г., том 2, с.185-187.). Анализ физических процессов, происходящих в приводе, показал возможность использования величины центробежных сил, действующих на подвижное звено в качестве информационных и энергетических потоков для коррекции энергии.
Поставленная задача достигается тем, что в приводе колебательного типа, включающем корпус с установленными на нем упорами, поворотное звено механической руки, выполненное в виде маятника, с устройством позиционирования, вдоль механической руки подпружинен и натянут трос, на механической руке установлена инерционная масса, соединенная с тросом, на корпусе привода установлен дополнительный упор, выполненный с возможностью зацепления за него троса и отведения избыточной энергии.
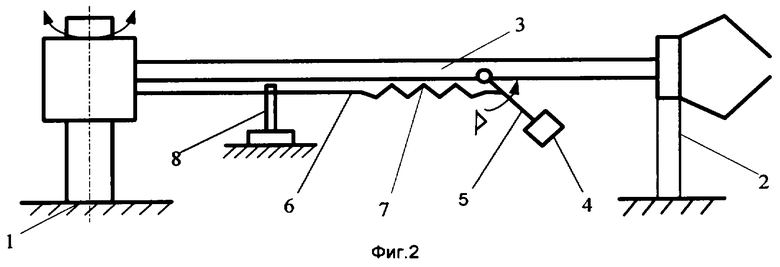
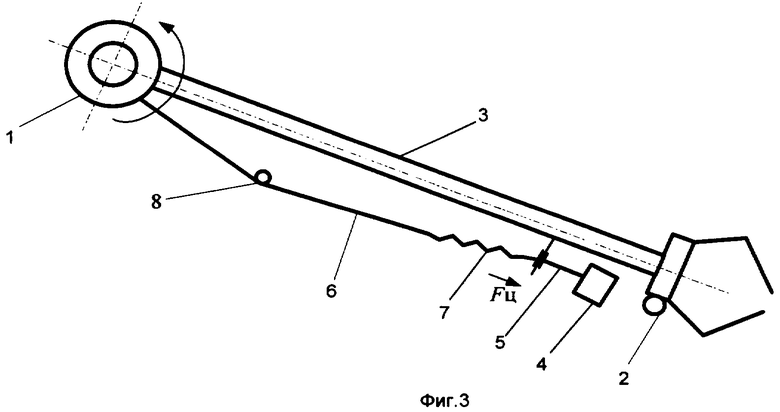
Пример реализации предлагаемого устройства показан на чертежах привода соответственно в статическом положении (фиг.1) и при подходе к точке позиционирования (главный вид - фиг.2, вид сверху - фиг.3).
Привод колебательного типа состоит из корпуса 1 с установленными на нем устройствами позиционирования 2 крайних положений механической руки 3, выполненных в виде выдвижных упоров. На механической руке 3, выполненной в виде маятника, установлена инерционная масса 4, закрепленная на рычаге 5 и соединенная с тросом 6, подпружиненным пружиной 7 и натянутым вдоль механической руки. На корпусе 1 привода установлен дополнительный упор 8, выполненный с возможностью зацепления за него троса и отведения избыточной энергии.
Устройство работает следующим образом. В исходном положении механическая рука 3 занимает одно из крайних положений и удерживается в нем устройством позиционирования 2. Механическая рука не перемещается, отсутствуют центробежные силы, инерционная масса 4 занимает крайнее левое положение и не натягивает трос 6.
По команде из системы управления (не показано) устройство позиционирования отводится от механической руки, тем самым, освобождая ее. Механическая рука, разгоняясь, начинает перемещаться в направлении противоположного крайнего положения. При этом возникающие центробежные силы отклоняют инерционную массу от центра поворота механической руки, натягивая трос 6. Чем больше угловая скорость механической руки, тем больше сила натяжения троса 6. Максимальную скорость движения механическая рука 3 достигает при прохождении положения статического равновесия. При дальнейшем ее движении угловая скорость начинает уменьшаться, уменьшается и сила натяжения троса 6.
При подходе к крайнему положению механической руки 3 трос 6 зацепляется за упор 8, установленный на корпусе 1 привода. При этом, чем больше величина избыточной энергии механической руки 3, тем больше ее отводится от привода для обеспечения надежного безударного позиционирования.
При ситуации выхода механической руки 3 в точку позиционирования на требуемой безударной скорости, корректирующее устройство не оказывает силового воздействия на механическую руку, так как центробежные силы, действующие на инерционную массу 4, приближаются к нулю и натяжение троса 6 отсутствует.
Это позволяет использовать механическую энергию рабочего органа для организации ее коррекции без преобразования, например, механической в электрическую, а затем опять в механическую.
Таким образом, предлагаемое устройство позволяет повысить надежность работы привода.
Работоспособность и эффективность предлагаемого устройства подтверждена моделированием и натурными испытаниями макета привода колебательного типа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОВОРОТНЫЙ ПРИВОД ЗВЕНА РЕЗОНАНСНОЙ МЕХАНИЧЕСКОЙ РУКИ | 2003 |
|
RU2271273C2 |
| МЕХАНИЧЕСКАЯ РУКА | 1993 |
|
RU2065354C1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 1994 |
|
RU2079401C1 |
| СПОСОБ ПОДПИТКИ ЭНЕРГИЕЙ ПРИВОДА КОЛЕБАТЕЛЬНОГО ТИПА | 2002 |
|
RU2239549C2 |
| СПОСОБ РАБОТЫ ПРИВОДА С РЕКУПЕРАЦИЕЙ МЕХАНИЧЕСКОЙ ЭНЕРГИИ | 2004 |
|
RU2266191C1 |
| ЗАХВАТНЫЙ МОДУЛЬ | 2008 |
|
RU2397857C2 |
| ЗАХВАТНАЯ ГОЛОВКА | 2003 |
|
RU2256549C2 |
| ВАКУУМНЫЙ ЗАХВАТНЫЙ КОРРЕКТИРУЮЩИЙ МОДУЛЬ | 2009 |
|
RU2431561C2 |
| ЗАХВАТНАЯ ГОЛОВКА | 2005 |
|
RU2318653C2 |
| ВАКУУМНАЯ ЗАХВАТНАЯ ГОЛОВКА | 2005 |
|
RU2304505C2 |
Изобретение относится к области роботостроения и может применяться для перемещения заготовок или деталей между технологическим оборудованием. Привод колебательного типа включает корпус с установленными на нем упорами, поворотное звено механической руки, выполненное в виде маятника, с устройством позиционирования. Вдоль механической руки подпружинен и натянут трос, на механической руке установлена инерционная масса, соединенная с тросом. На корпусе привода установлен дополнительный упор, выполненный с возможностью зацепления за него троса и отведения избыточной энергии. Изобретение позволит увеличить надежность и повысить безопасность работы, не ограничивая скоростные характеристики привода. 3 ил.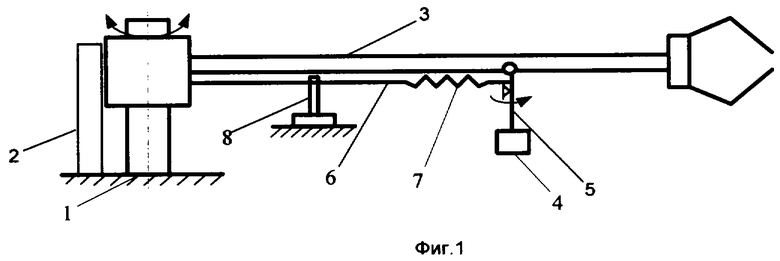
Привод колебательного типа, включающий корпус с установленными на нем упорами, поворотное звено механической руки, выполненное в виде маятника, с устройством позиционирования, отличающийся тем, что вдоль механической руки подпружинен и натянут трос, на механической руке установлена инерционная масса, соединенная с тросом, на корпусе привода установлен дополнительный упор, выполненный с возможностью зацепления за него троса и отведения избыточной энергии.
| СПОСОБ ПОДПИТКИ ЭНЕРГИЕЙ ПРИВОДА КОЛЕБАТЕЛЬНОГО ТИПА | 2002 |
|
RU2239549C2 |
| ПОВОРОТНЫЙ ПРИВОД ЗВЕНА РЕЗОНАНСНОЙ МЕХАНИЧЕСКОЙ РУКИ | 2003 |
|
RU2271273C2 |
| МЕХАНИЧЕСКАЯ РУКА | 1993 |
|
RU2065354C1 |
| Механическая рука | 1982 |
|
SU1237413A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |

