Предлагаемое устройство относится к области машиностроения, роботостроения и может применяться при взятии и установке деталей на рабочую поверхность с требуемым ходом перемещения захватной головки.
Известны захватные модули, обеспечивающие взятие и установку деталей, которые содержат захватную головку с приводом ее вертикального перемещения (см. а.с. №1389154 «Захватная головка», Сысоев С.Н., Черкасов Ю.В. Агрегатно-модульное захватное устройство робота // Механизация и автоматизация производства. - 1987. - №1. - С.3). Применение традиционной схемы работы привода вертикального перемещения захвата, системы управления приводит к невысокой надежности и низкому быстродействию, связанному с большим временем на установку детали. Реализация систем управления привода вертикального перемещения на аппаратном принципе (см. А.с. №1540177 «Вакуумное захватное устройство», Сысоев С.Н., Черкасов Ю.В.) незначительно повышает быстродействие.
Известны захватные модули, созданные с использованием мехатронного принципа построения (см. патент России №2073601 «Вакуумное захватное устройство», Сысоев С.Н., Черкасов Ю.В., Мокеева Е.В., Глушков А.А.), где для питания применяется избыточное давление воздуха. Вакуумное захватное устройство содержит привод вертикального перемещения присоски, выполненный в виде двух пневмоцилиндров одностороннего действия, кинематически связанных между собой. Причем один пневмоцилиндр предназначен для выполнения устройством функции «взять» деталь, а второй - «установить» деталь. Эти функции представляют собой последовательное выполнение операций «опускание захвата на поверхность детали», «захват или отпускание детали», «подъем присоски».
Данное устройство, обладая повышенным высоким быстродействием, имеет сложную конструкцию, так как привод вертикального перемещения присоски состоит из двух пневмоцилиндров, а присоска выполнена с периферийной полостью, что ухудшает массогабаритные показатели устройства.
Известны захватные модули (см. патент РФ №2318653 «Захватная головка», Сысоев С.Н., Бакутов А.В., Орехов Н.С., опубл. в Бюл. №7, 10.03.08 г.). В устройстве привод вертикального перемещения захвата выполнен в виде силового цилиндра двухстороннего действия, поршневая полость которого соединена со штоковой полостью, а в пневмолинию соединения распределителя и предохранительного клапана дополнительно установлен дроссель. В данном устройстве ограничен ход вертикального перемещения захвата габаритными размерами привода. Применение трубопроводов, унифицированного предохранительного клапана с ограниченными расходными характеристиками снижает надежность и быстродействие работы устройства.
Наиболее близким из известных технических решений является захватный модуль (см. патент России №2256549 «Захватная головка», Сысоев С.Н., Жиров М.Ю.), где для питания также применяется избыточное давление воздуха. Захватный модуль состоит из захватной головки (присоски) и привода ее вертикального перемещения, выполненного в виде пневмоцилиндра одностороннего действия, а поршневая полость соединена с линией нагнетания через распределитель и с атмосферой через предохранительный клапан. Присоска выполнена безнасосной с рабочей камерой, соединенной с атмосферой через распределитель.
Применение в данных захватных модулях известных безнасосных захватных головок (см. Сысоев С.Н., Бакутов А.В., Приведенец И.А. «Конструирование быстродействующих вакуумных захватов», журнал СТИН, 2007 г., №12, с.15-19; патент РФ №2304505 «Вакуумная захватная головка», Сысоев С.Н. и др., опубл. 20.08.2007 в БИ №23; патент РФ №2317452 «Вакуумная захватная головка», Сысоев С.Н. и др., опубл. 20.02.08 в БИ №5; патент РФ №2312762 «Вакуумная захватная головка», Сысоев С.Н. и др., опубл. 20.02.08 в БИ №5) повышает быстродействие и надежность выполнения операций «захватить», «отпустить» изделие. Однако использование в известных захватных модулях в качестве привода вертикального перемещения присоски пневмоцилиндров одностороннего действия традиционного исполнения, предохранительного клапана ограничивает величину вертикального перемещения, снижает быстродействие и надежность работы модуля в целом.
Для выявления возможности совершенствования известного захватного модуля использовалось следующее положение: «Разные технические объекты, имеющие одинаковые функционально-физические связи, могут выполнять одинаковые функции» (см. с.62, Сысоев, С.Н. Принципы и методы нахождения технических решений. Метод исследования функционально-физических связей: моногр. / С.Н.Сысоев, Владим. гос. ун-т. - Владимир: Изд-во Владим. гос. ун-та, 2007. - 214 с.).
Анализ работы предохранительного клапана и пневмоцилиндра одностороннего действия выявил, что поршень и корпус пневмоцилиндра выполняют функцию герметизации рабочей камеры. Эту же функцию и функцию разгерметизации выполняет предохранительный клапан. Если организовать дополнительную функцию разгерметизации рабочей камеры пневмоцилиндра соответствующим взаимодействием корпуса и поршня, то пневмоцилиндр, кроме выполнения своей основной функции, будет выполнять функцию предохранительного клапана.
Задачей предлагаемого изобретения является повышение быстродействия и надежности работы устройства во всем диапазоне требуемых величин перемещения присоски за счет возложения функций предохранительного клапана на силовую часть привода вертикального перемещения захватной головки и устранения зависимости величины ее хода от размеров привода вертикального перемещения.
Поставленная задача достигается тем, что в предлагаемом устройстве, включающем захватную головку, закрепленную на подвижном элементе, подпружиненном возвратной пружиной к корпусу в пневмоприводе одностороннего действия с рабочей камерой, выполненной с возможностью соединения через распределитель с линией избыточного давления воздуха, рабочая камера образована полостью корпуса и крышкой, а захватная головка закреплена на крышке, установленной на корпусе с возможностью разъединения с ним.
Кроме этого, для повышения быстродействия, увеличения диапазона рабочего хода захвата и оптимизации работы устройства с различными по массе изделиями на корпусе может быть установлен постоянный магнит с возможностью силового взаимодействия с крышкой, а возвратная пружина соединена с штоком дополнительно установленного на корпусе пневмоцилиндра одностороннего действия, поршневая рабочая полость которого соединена с рабочей камерой.
Пример реализации предлагаемого устройства показан на фиг.1.
Устройство состоит из корпуса 1, возвратной пружины 2, клапана 3, уплотнения 4, постоянного магнита 5, крышки 6, изделия 7, захватываемого присоской 8.
Полость корпуса 1 закрывается крышкой 6 с уплотнением 4, образуя рабочую камеру пневмопривода. Крышка 6 подпружинена возвратной пружиной 2 к корпусу 1, на котором закреплен постоянный магнит 5 с возможностью силового взаимодействия с крышкой 6. Рабочая камера выполнена с возможностью соединения с пневмолинией избыточного давления воздуха через управляемый клапан 3 (управление не показано). На крышке закреплена присоска 8.
Захватный модуль работает следующим образом.
В исходном положении (фиг.1, а), так как клапан закрыт, рабочая камера пневмопривода не соединена с линией избыточного давления, присоска занимает крайнее верхнее положение.
По команде «взять изделие» (фиг.1, б) открывается клапан 3, соединяя пневмолинию избыточного давления воздуха с рабочей камерой пневмопривода. В ней повышается избыточное давление воздуха и накапливается потенциальная энергия. Возрастает сила от давления, действующая на отрыв крышки 6 от корпуса 1. При превышении удерживающих крышку 6 сил она перемещается в направлении изделия 7 (фиг.1, в). Выключается клапан 3. Присоска 8 достигает поверхности изделия 7 и, продолжая двигаться в том же направлении за счет инерционных сил, деформируется (фиг.1, г), вытесняя воздух из своей рабочей полости. Выполняется функция захвата изделия. Затем начинает действовать возвратная пружина, перемещая крышку 6, присоску 8 с деталью 7 в направлении к корпусу 1 (фиг.1, д). После соединения крышки 6 с корпусом 1 изделие занимает крайнее верхнее положение и процесс «взять изделие» заканчивается.
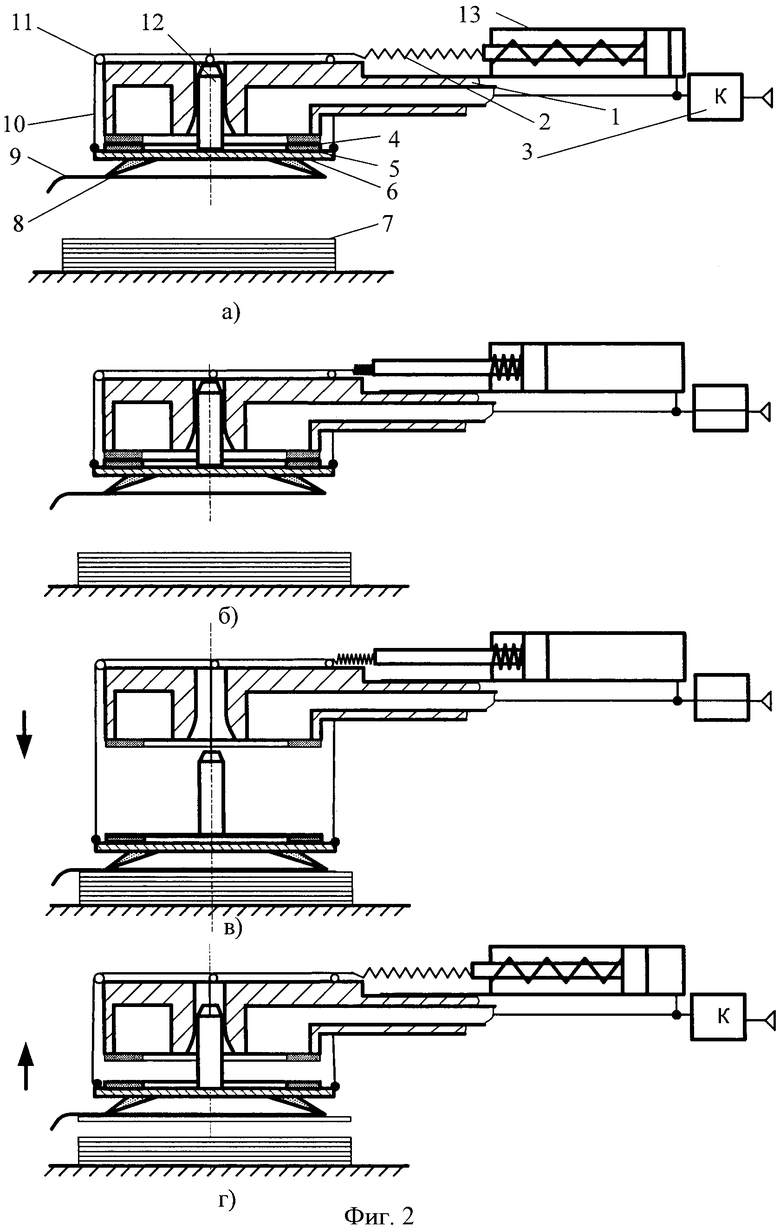
Пример реализации захватного модуля, с установкой дополнительного пневмоцилиндра, предназначенного для автоматического изменения усилия действия возвратной пружины в процессе работы, показан на фиг.2.
Захватный модуль состоит из корпуса 1, возвратной пружины 2, управляемого клапана 3 (управление не показано), уплотнения 4, постоянного магнита 5, крышки 6, изделия 7, захватываемого присоской 8 с закрепленным на ее периферийной поверхности рычагом 9, тросов 10, обводных элементов 11, направляющей 12 и пневмоцилиндра одностороннего действия 13. Полость корпуса 1 закрывается через уплотнение 4 крышкой 6, образуя рабочую камеру. Тросы 10 одним концом соединены с крышкой 6, а другим - с возвратной пружиной 2, закрепленной на штоке пневмоцилиндра 13, поршневая полость которого соединена пневмолинией с рабочей камерой и через клапан 3 с пневмолинией избыточного давления воздуха. На крышке 6 установлена направляющая 12.
Устройство работает следующим образом.
В исходном положении (фиг.2, а) клапан закрыт, рабочая камера и поршневая полость пневмоцилиндра разъединены с пневмолинией избыточного давления воздуха, поршень пневмоцилиндра занимает крайнее правое положение, натягивая возвратную пружину, создавая усилие прижатия крышки к корпусу через тросы. Присоска занимает крайнее верхнее положение.
По команде «взять изделие» (фиг.2, б) открывается клапан, соединяя пневмолинию избыточного давления воздуха с рабочей камерой пневмопривода и поршневой полостью пневмоцилиндра. В них повышается избыточное давление воздуха и накапливается потенциальная энергия. Возрастает сила от давления, действующая на отрыв крышки от корпуса. Поршень пневмоцилиндра перемещается влево, ослабляя усилие натяжения пружины. При превышении удерживающих крышку сил она перемещается в направлении изделия (фиг.2, в). Выключается клапан. Присоска достигает поверхности изделия и, продолжая двигаться в том же направлении за счет инерционных сил, деформируется, вытесняя воздух из своей рабочей полости. При этом на рычаг 9 не оказывается силового воздействия со стороны изделия. Выполняется функция захвата изделия. Поршень пневмоцилиндра перемещается вправо, дополнительно натягивая возвратную пружину 2. Возвратная пружина перемещает крышку и присоску с изделием в направлении к корпусу. Направляющая 12 способствует реализации требуемой ориентации крышки относительно корпуса (фиг.2, г). После соединения крышки с корпусом изделие занимает крайнее верхнее положение и процесс «взять изделие» заканчивается.
По команде «установить изделие» на рабочую поверхность захватный модуль выполняет такие же действия, какие выполнялись при взятии изделия. Отличие состоит в том, что при приближении изделия к рабочей поверхности первоначально рычаг 9 взаимодействует с ней. Данное силовое взаимодействие приводит к тому, что край присоски отводится от поверхности изделия, ее рабочая полость разгерметизируется, то есть выполняется операция отпускания изделия присоской.
Повышение быстродействия и надежности работы устройства при значительном увеличении диапазона величин перемещения присоски достигается за счет:
- выполнения подвижного элемента, отсоединяющегося от корпуса привода перемещения захвата;
- применения постоянного магнита, магнитное поле которого позволяет увеличить величину потенциальной энергии сжатого воздуха в рабочей камере;
- изменения характеристики силового воздействия на подвижный элемент со стороны возвратной пружины в процессе его опускания и подъема.
Во Владимирском государственном университете был изготовлен действующий макет захватного модуля (фиг.3). Натурные испытания показали его работоспособность и эффективность. По сравнению с аналогичными устройствами в несколько раз повышено быстродействие и максимальный рабочий ход захвата. Например, выполнение операции «взять» изделие (опускание захвата, захват изделия, подъем) массой 100 г с расстояния 200 мм осуществляется за время менее 0,1 секунды.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЗАХВАТНАЯ ГОЛОВКА | 2005 |
|
RU2318653C2 |
| ЗАХВАТНАЯ ГОЛОВКА | 2003 |
|
RU2256549C2 |
| ВАКУУМНАЯ ЗАХВАТНАЯ ГОЛОВКА | 2006 |
|
RU2312762C1 |
| Вакуумный захватный агрегатный модуль | 2019 |
|
RU2703771C1 |
| ВАКУУМНАЯ ЗАХВАТНАЯ ГОЛОВКА | 2005 |
|
RU2304505C2 |
| Вакуумный захватный агрегатный модуль | 2018 |
|
RU2691155C1 |
| ВАКУУМНАЯ ЗАХВАТНАЯ ГОЛОВКА | 2008 |
|
RU2370359C1 |
| Захватный корректирующий модуль | 2015 |
|
RU2618019C1 |
| ВАКУУМНЫЙ ЗАХВАТНЫЙ КОРРЕКТИРУЮЩИЙ МОДУЛЬ | 2009 |
|
RU2431561C2 |
| ВАКУУМНОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 1994 |
|
RU2073601C1 |
Изобретение относится к области машиностроения, роботостроения и может применяться при взятии и установке деталей на рабочую поверхность с большим требуемым ходом перемещения захватной головки. Захватный модуль содержит корпус, захватную головку в виде деформируемой присоски, возвратную пружину и пневмопривод одностороннего действия, рабочая камера которого соединена через клапан с пневмолинией избыточного давления воздуха. Захватный модуль снабжен крышкой, подпружиненной к корпусу возвратной пружиной с образованием рабочей камеры пневмопривода. Присоска снабжена рычагом для установки захваченной детали и закреплена на крышке, которая установлена на корпусе с возможностью разъединения с ее перемещением в направлении захватываемой детали за счет действий инерционных сил и в направлении к корпусу - за счет возвратной пружины. На корпусе установлен постоянный магнит с возможностью силового взаимодействия с крышкой. Изобретение повышает быстродействие и надежность работы устройства при значительном увеличении диапазона величин перемещения захватной головки. 2 з.п. ф-лы, 3 ил.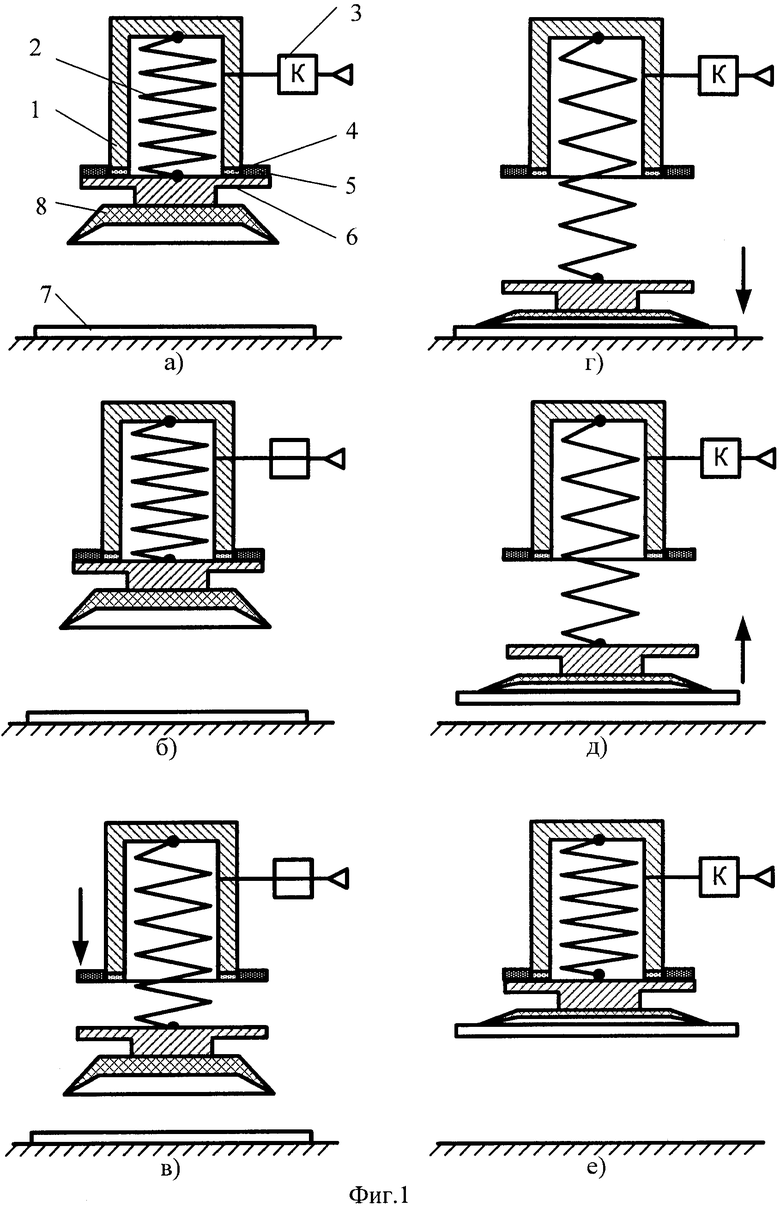
1. Захватный модуль, содержащий корпус, захватную головку в виде деформируемой присоски, возвратную пружину и пневмопривод одностороннего действия, рабочая камера которого соединена через клапан с пневмолинией избыточного давления воздуха, отличающийся тем, что он снабжен крышкой, подпружиненной к корпусу возвратной пружиной с образованием рабочей камеры пневмопривода, при этом присоска снабжена рычагом для установки захваченной детали и закреплена на крышке, которая установлена на корпусе с возможностью разъединения с ее перемещением в направлении захватываемой детали за счет действий инерционных сил и в направлении к корпусу - за счет возвратной пружины.
2. Захватный модуль по п.1, отличающийся тем, что на корпусе установлен постоянный магнит с возможностью силового взаимодействия с крышкой.
3. Захватный модуль по п.1, отличающийся тем, что возвратная пружина соединена с штоком дополнительно установленного на корпусе пневмоцилиндра одностороннего действия, поршневая рабочая полость которого соединена с рабочей камерой.
| ЗАХВАТНАЯ ГОЛОВКА | 2003 |
|
RU2256549C2 |
| Вакуумное захватное устройство | 1990 |
|
SU1776558A1 |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД ОДНОСТОРОННЕГО ДЕЙСТВИЯ | 2006 |
|
RU2317452C2 |
| Вакуумный захват | 1988 |
|
SU1615130A1 |
| US 2007187965 A1, 16.08.2007. | |||

