Предлагаемое изобретение относится к области навигационного приборостроения и может быть использовано в магнитных стрелочных компасах, снабженных широтным компенсатором и устанавливаемых на судах, совершающих плавания, связанные со значительными изменениями магнитной широты.
Известен широтный компенсатор - флиндерсбар, описанный в книге "Магнитно-компасное дело", Н.Ю.Рыбалтовский, Государственное издательство водного транспорта, Ленинградское отделение, Л., 1954 г., стр.326-333.
Широтный компенсатор содержит вертикальный цилиндрический брусок мягкого железа, устанавливаемый спереди или сзади магнитного компаса в диаметральной плоскости, перпендикулярно к палубе судна. При этом верхний срез бруска располагается на уровне стрелок магнитного чувствительного элемента компаса (см. стр.327, 332).
Установка широтного компенсатора на компасе производится подбором его положения относительно магнитного чувствительного элемента компаса путем передвижения бруска (см. стр.330 и 332).
Окончательной установке широтного компенсатора предшествует ряд операций, производимых как в судовых, так и в береговых условиях:
- наблюдение полукруговой девиации не менее чем в двух различных магнитных широтах (см. стр.326) для определения судовых параметров С и К;
- вычисление коэффициента пропорциональности m широтного компенсатора по формуле (6) (см. стр.328);
- установка широтного компенсатора у нактоуза компаса в береговых условиях (см. стр.329) с сопутствующими измерениями и вычислениями (см. стр.329-332).
Основным недостатком рассмотренного широтного компенсатора является сложность и трудоемкость операций, предшествующих его установке, в том числе выбор его положения путем многократных последовательных перемещений бруска с сопутствующими измерениями и вычислениями. Другим недостатком является сложность конструктивного исполнения элементов, обеспечивающих крепление широтного компенсатора на компасе из-за неоднозначности его расположения относительно магнитного чувствительного элемента компаса.
В книге описан также широтный компенсатор-флиндерсбар В.Томсона (см. стр.332), состоящий из отдельных цилиндрических брусков мягкого железа размером 12, 6, 3, 1 1/2 дюйма и двух брусков по 3/4 дюйма. Бруски помещены в медную трубу, которая крепится к нактоузу компаса. Установка брусков осуществляется по известной таблице.
Основным недостатком широтного компенсатора В. Томсона является необходимость подбора длины его стержня путем замены брусков, а также сложность и трудоемкость операций по подбору длины стержня с сопутствующими измерениями и вычислениями.
Другой недостаток состоит в том, что компенсатор состоит из одного стержня, образованного брусками мягкого железа, т.е. является одинарным, намагничивается магнитным полем магнитного чувствительного элемента компаса и создает при этом дополнительную погрешность компаса - девиацию от индукции. Последняя требует установки на компас дополнительного компенсатора индукции в виде индукционных пластин, что усложняет конструкцию компаса и требует дополнительных работ по компенсации девиации от индукции.
Известен также широтный компенсатор-флиндерсбар, описанный в книге "Девиация магнитного компаса", В.П.Кожухов, В.В.Воронов, В.В.Григорьев, "Морской транспорт", Л., 1960 г., стр.227-239.
Широтный компенсатор содержит набор цилиндрических стержней разной длины, помещаемых в латунный пенал, закрепленный на нактоузе компаса. Верхний конец широтного компенсатора находится примерно на уровне магнитов магнитного чувствительного элемента компаса.
Основными величинами рассматриваемого широтного компенсатора являются диаметр составляющих стержней d, суммарная длина стержня L и расстояние от магнитного чувствительного элемент r. Они определяют основной параметр широтного компенсатора C1. Величины d и r являются постоянными. В зависимости от длины стержня L компенсатор будет создавать то или иное значение параметра C1.
Для определения основного параметра компенсатора C1 (см. формулу 103 стр.233) необходимо в двух различных точках земного шара с разными магнитными широтами произвести специальные наблюдения: определить коэффициенты полукруговой девиации В0’ и измерить дефлектором судовую вертикальную силу Z' на магнитном курсе Ost (W).
По ним произвести расчеты судовых параметров Со и Ко (см. стр.234) и только после этого вычислить основной параметр широтного компенсатора C1.
Однако для рассматриваемого широтного компенсатора отсутствует аналитическое выражение, определяющее соотношение основного параметра C1 и длины стержней L.
Поэтому на практике при установке рассматриваемого широтного компенсатора производят подбор необходимой суммарной длины стержня путем многократной последовательной перестановкой составляющих стержней с сопутствующими этому измерениями и вычислениями.
Основной недостаток рассматриваемого широтного компенсатора состоит в трудоемкости работ, выполняемых в судовых и береговых условиях по подбору необходимой суммарной длины стержня компенсатора путем многократных последовательных ее изменений перестановкой составляющих стержней.
Другой недостаток рассматриваемого широтного компенсатора состоит в том, что он является одинарным, намагничивается полем магнитного чувствительного элемента компаса и создает при этом дополнительную погрешность компаса - девиацию от индукции. Для уничтожения этой девиации необходима установка на компас специальных индукционных пластин, что усложняет конструкцию компаса, вызывает необходимость проведения дополнительных работ по уничтожению девиации от индукции и вынуждает операцию по установке широтного компенсатора производить в два приема - сначала на судне, а затем в береговых условиях (см. стр.236) (Рассматриваемый широтный компенсатор описан также в книге "Магнитно-компасное дело", П.А.Нечаев, В.В.Григорьев, М.: Транспорт, 1975 г., стр.166-168).
Наиболее близким к предлагаемому изобретению по технической сущности является безындукционный сдвоенный широтный компенсатор-флиндерсбар, описанный в книге "Девиация магнитного компаса", стр.236-244 (прототип).
Безындукционный сдвоенный широтный компенсатор содержит два одинаковых вертикальных стержня (из наборов брусков мягкого железа), расположенных во взаимно перпендикулярных вертикальных плоскостях, проходящих через центр магнитного чувствительного элемента компаса.
Достоинством его является безындукционность, т.е. он не создает девиацию компаса от индукции, что исключает необходимость в установке индукционных пластин и проведении дополнительных девиационных работ, а также малая масса (см. стр.236).
Установке сдвоенного безындукционного широтного компенсатора (прототипа) предшествуют следующие операции:
- определение судовых параметров Со, fo, Ко (см. стр.238) при плавании судна в двух различных точках земного шара с разными магнитными широтами (с сопутствующими измерениями и расчетами);
- расчет основного параметра m широтного компенсатора (см. стр.238);
- выбор по величине основного параметра m длины стержней компенсатора и установка широтного компенсатора на компасе.
Однако предложенный в книге для прототипа выбор длины стержней по графикам заводов-изготовителей, отражающим зависимость m=f(L) (см. стр.238) на практике не может быть реализован из-за отсутствия указанных графиков, разработанных и выпущенных изготовителями серийных магнитных компасов.
Заявитель - ОАО "Штурманские приборы" является единственным в РФ предприятием-разработчиком магнитных компасов, снабженных широтными компенсаторами, и до настоящего времени графики зависимости параметра m от длины L компенсатора для серийно изготавливаемых магнитных компасов не составлялись.
В связи со сказанным, для установки безындукционного сдвоенного широтного компенсатора на компас требуется выполнение всего комплекса работ, рассмотренных выше для аналогов, в том числе подбор суммарной длины стержней путем многократной последовательной замены составляющих брусков, с сопутствующими измерениями и вычислениями, что может быть выполнено только в два приема:
- в судовых условиях;
- в береговых условиях.
Основным недостатком рассмотренного прототипа - безындукционного сдвоенного широтного компенсатора является необходимость выполнения трудоемких работ по подбору суммарной длины его стержней путем многократной последовательной замены составляющих брусков с сопутствующими этой работе наблюдениями, измерениями и расчетами.
Основными задачами, на решение которых направлено предлагаемое изобретение, является:
- оптимизация параметров безындукционного сдвоенного широтного компенсатора;
- определение аналитической зависимости длины каждого стержня компенсатора от диаметра составляющих брусков, магнитной восприимчивости стержня, расстояния стержня от вертикали компаса и коэффициента пропорциональности компенсатора (параметра m);
- уменьшение трудоемкости работ, выполняемых при установке широтного компенсатора на магнитный компас, за счет исключения необходимости многократного последовательного подбора суммарной длины его стержней путем перестановки составляющих брусков и определение необходимой длины сердечников путем расчета по аналитической зависимости;
- уменьшение трудоемкости работ по установке широтного компенсатора на компас за счет исключения береговых работ, связанных с демонтажем компаса, перевозкой его на берег и возвращения на штатное место на судне.
Для решения указанных задач в безындукционном сдвоенном широтном компенсаторе, содержащем два вертикальных стержня из брусков мягкого железа, расположенные в двух взаимно перпендикулярных вертикальных плоскостях, проходящих через вертикаль компаса, длина каждого стержня определяется формулой
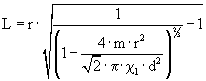
где L - длина стержня, состоящего из брусков;
r - расстояние от вертикальной оси стержня до вертикали компаса;
m - коэффициент пропорциональности (параметр) безындукционного сдвоенного широтного компенсатора;
π - константа;
χ1 - магнитная восприимчивость стержня;
d - диаметр брусков стержня.
Предлагаемый безындукционный сдвоенный широтный компенсатор, установленный на магнитном компасе, представлен на фиг.1, 2, 3 и 4.
На фиг.1 представлен общий вид безындукционного сдвоенного широтного компенсатора, установленного на магнитном компасе, вид сбоку.
На фиг.2 представлен безындукционный сдвоенный широтный компенсатор, установленный на магнитном компасе, вид сверху.
На фиг.3 представлено размещение компенсатора, вид сбоку.
На фиг.4 представлено размещение компенсатора, вид сверху.
Безындукционный сдвоенный широтный компенсатор состоит из двух пеналов 1 и 2 (см. фиг.1 и 2), внутри которых размещены наборы из цилиндрических брусков мягкого железа 3 и 4, образующих стержни компенсатора.
Пеналы 1 и 2 крепятся на корпусе магнитного компаса, установлены вертикально, параллельно вертикали компаса, при этом торец верхнего бруска каждого набора (фиг.3) расположен на уровне α-магнитов магнитного чувствительного элемента компаса. Пеналы 1 и 2 расположены в двух взаимно перпендикулярных вертикальных плоскостях, проходящих через вертикаль компаса OO (фиг.4), расположенных под углом 45° к диаметральной плоскости ДП компаса. Каждый стержень компенсатора, состоящий из набора брусков, имеет суммарную длину L (фиг.3) и расположен на расстоянии r от вертикали компаса OO.
Предлагаемое устройство работает следующим образом.
При наличии в районе размещения магнитного компаса на судне вертикальных стальных устройств (мачта, труба, антенна) они создают изменяющееся воздействие на компас вследствие изменяющейся в процессе плавания магнитной широты (вертикальной составляющей магнитного поля Земли), характеризующееся параметром Пуассона Со. Для компенсации этого влияния к нактоузу магнитного компаса прикрепляют известное устройство - сдвоенный широтный компенсатор, который должен создать равный значению Со, но противоположный по знаку параметр m. Знак параметра m зависит от размещения компенсатора. Параметр m определяется длиной L стержней компенсатора при постоянных значениях диаметра d брусков, образующих стержни, расстояний стержней от вертикали компаса r и магнитной восприимчивости стержней χ1.
После изменения судном магнитной широты рассчитывают по известной формуле значение параметра Пуассона Со. Формула для расчета параметра Со известна из литературных источников (например, см. книгу "Девиация магнитного компаса", стр.234, формула 104).
По формуле рассчитывают длину L стержней, принимая во внимание равенство абсолютных значений параметра Пуассона Со и параметра компенсатора m. Подбирают наборы брусков мягкого железа из числа входящих в принадлежности компаса, наиболее близко совпадающих с расчетным значением параметра m и устанавливают наборы в пеналы компенсатора. Все операции производят только на судне без демонтажа компаса и его перемещения на берег. После установки наборов стержней в пеналы компенсатора влияние судового оборудования на компас компенсируется, что обеспечивает уменьшение погрешностей курсоуказания.
Предлагаемое устройство по сравнению с прототипом обеспечивает:
- оптимизацию параметров безындукционного сдвоенного широтного компенсатора за счет определения необходимой длины стержней компенсатора расчетным путем по аналитической зависимости - формула (1), а не экспериментальным путем за счет многоразового подбора;
- уменьшение трудоемкости работ, выполняемых при установке широтного компенсатора на магнитный компас за счет исключения необходимости многократного последовательного подбора суммарной длины его стержней путем перестановки составляющих брусков и сопутствующих наблюдений, измерений и расчетов;
- уменьшение трудоемкости по установке широтного компенсатора на компас за счет выполнения всех операций на судне и исключения необходимости береговых работ, связанных с демонтажем компаса, перевозкой его на берег и возвращением на штатное место на судне.
Теоретическое приложение к заявке "Безындукционный сдвоенный широтный компенсатор".
В работе [1] приведена формула для расчета горизонтальной составляющей напряженности магнитного поля Н, создаваемого схематическим магнитом во внешней точке:

где М - магнитный момент магнита;
r и h - расстояния от верхнего полюса магнита до точки измерения по горизонтали и вертикали соответственно;
θ - угол наклона оси магнита к вертикали;
L - длина магнита.
В рассматриваемом случае стержни сдвоенного широтного компенсатора устанавливают так, что их верхние полюсы находятся на уровне магнитного чувствительного элемента (МЧЭ) компаса, т.е. на уровне точки измерения, а их оси вертикальны. Поэтому h=0 и θ=0, после чего (1) для одного стержня приобретает вид

В соответствии с [2] для сдвоенного широтного компенсатора в (2) добавляется сомножитель  и М определяется формулой
и М определяется формулой
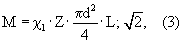
где χ1 - магнитная восприимчивость стержня;
Z - вертикальная составляющая напряженности внешнего магнитного поля;
d - диаметр стержня.
Коэффициент пропорциональности (параметр) компенсатора m равен отношению Н, создаваемого компенсатором в центре МЧЭ, к Z. Отсюда
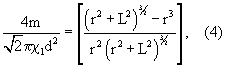
Получим из (4) выражение для L. После несложных преобразований
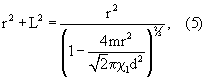
откуда
Литература
1. Колюбакин В.В., Лапина М.П. Обзор способов решения прямой и обратной задач магнитной разведки. Труды Института физики Земли им. О.Ю.Шмидта, 1960, №13
2. Вонсовский С.В. Магнетизм, - M.: Наука, 1971 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ КОМПАС | 2007 |
|
RU2338157C1 |
| МАГНИТНЫЙ КОМПАС | 2006 |
|
RU2323413C1 |
| СПОСОБ УНИЧТОЖЕНИЯ ПОЛУКРУГОВОЙ ДЕВИАЦИИ НА ОДНОМ МАГНИТНОМ КУРСЕ | 2010 |
|
RU2442961C1 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2364835C1 |
| МАГНИТНЫЙ КОМПАС | 2001 |
|
RU2239787C2 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2372587C1 |
| Способ измерения магнитного курса судна в высоких широтах и устройство для его реализации | 2018 |
|
RU2688900C1 |
| МАГНИТНЫЙ КОМПАС | 2005 |
|
RU2289786C1 |
| МАГНИТНЫЙ КОМПАС | 2003 |
|
RU2247322C2 |
| МАГНИТНЫЙ КОМПАС | 1999 |
|
RU2161775C2 |
Изобретение относится к области навигационного приборостроения и может быть использовано в магнитных стрелочных компасах, снабженных широтным компенсатором и устанавливаемых на судах, совершающих плавания, связанные со значительными изменениями магнитной широты. Сущность: компенсатор содержит два вертикальных стержня из брусков мягкого железа, расположенные в двух взаимно перпендикулярных вертикальных плоскостях, проходящих через вертикаль компаса. Длина каждого стержня определяется формулой
где L - длина стержня, состоящего из брусков; r - расстояние от вертикальной оси стержня до вертикали компаса; m - коэффициент пропорциональности (параметр) безындукционного сдвоенного широтного компенсатора; π - константа; χ1- магнитная восприимчивость стержня; d - диаметр брусков стержня. Технический результат: оптимизация параметров безындукционного сдвоенного широтного компенсатора, уменьшение трудоемкости по установке на магнитный компас. 4 ил.
Безындукционный сдвоенный широтный компенсатор, содержащий два вертикальных стержня из брусков мягкого железа, расположенных в двух взаимно перпендикулярных вертикальных плоскостях, проходящих через вертикаль компаса, отличающийся тем, что длина каждого стержня определяется формулой
где L - длина стержня, состоящего из брусков;
r - расстояние от вертикальной оси стержня до вертикали компаса;
m - коэффициент пропорциональности (параметр) безындукционного сдвоенного широтного компенсатора;
π - константа;
χ1 - магнитная восприимчивость стержня;
d - диаметр брусков стержня.
| Компенсатор девиации магнитных компасов | 1981 |
|
SU970108A1 |
| Способ охлаждения керамзита | 1975 |
|
SU554244A1 |
| Цифровое устройство для решения системы линейных уравнений | 1976 |
|
SU624234A1 |
| КОЖУХОВ В.П | |||
| и др | |||
| Девиация магнитного компаса | |||
| - Л.: Морской транспорт, 1960, с.236-244. | |||
