Изобретение относится к контрольно-измерительной технике, конкретно к навигационному приборостроению, и может быть использовано в магнитных судовых и авиационных компасах.
Известны компенсаторы девиации магнитных компасов. По устройству компенсаторы указанных компасов аналогичны: каждый из них содержит полую латунную трубу и линейные подвижные магниты, перемещаемые по этой трубе поступательно относительно магнитного чувствительного элемента компаса При этом в компасе УКП-М магниты закреплены на подвижных каретках, установленных снаружи трубы. Для правильной ориентации кареток на поверхности трубы проточены направляющие пазы, а каждая из кареток имеет направляющий штифт. В компасе КМО-Т магнит компенсатора креновой девиации, снабженныйоправой с зубчатой планкой, размещен внутри трубы и перемещается по стержню с червячной нарезкой, размещенному также внутри трубы. Изменение магнитного поля, воздействующего на магнитный чувствительный элемент компаса, осуществляется путем изменения расстояния между магнитным чувствительным ,
элементом компаса и магнитами компенсаторов .
Недостатком таких компенсаторов является нелинейная зависимость индукции магнитного поля в области магнитного чувствительного элемента компаса от линейного или углового перемещения магнитов. Это вызывает появление погрешностей при компенса10ции девиации, обусловленных тем, что в определенной зоне регулирования малым перемещением магнитов соответствуют значительные изменения индукции создаваемого ими поля. Эти
15 изменения индукции повышают значения, необходимые для обеспечения малой погрешности положения магнитного чувствительного элемента при скомпенсированном поле носителя компаса.
20
Другим недостатком компенсаторов с поступательным перемещением магнитов являются их значительные размеры, а компенсаторов с поворотными магнитами - сложность конструкции,
25 требующей наличия прямозубых и конических зубчатых передач.
Наиболее близким по технической сущности к предлагаемому является компенсатор, содержащий корпус, два
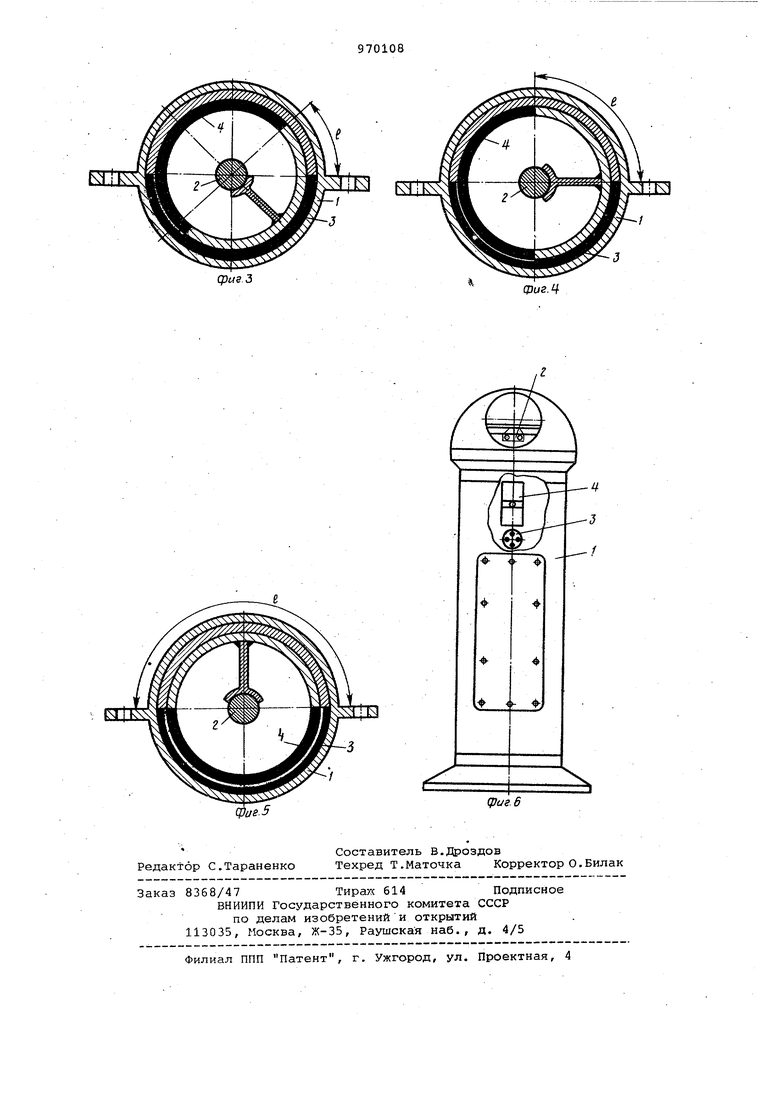
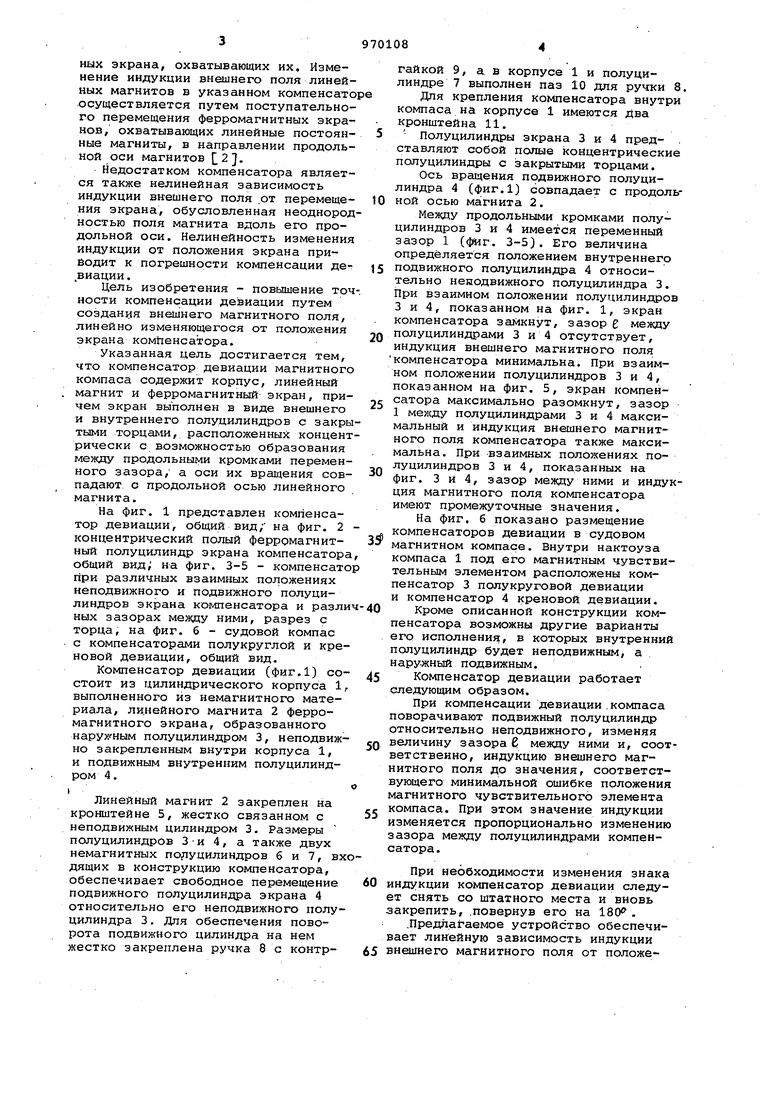
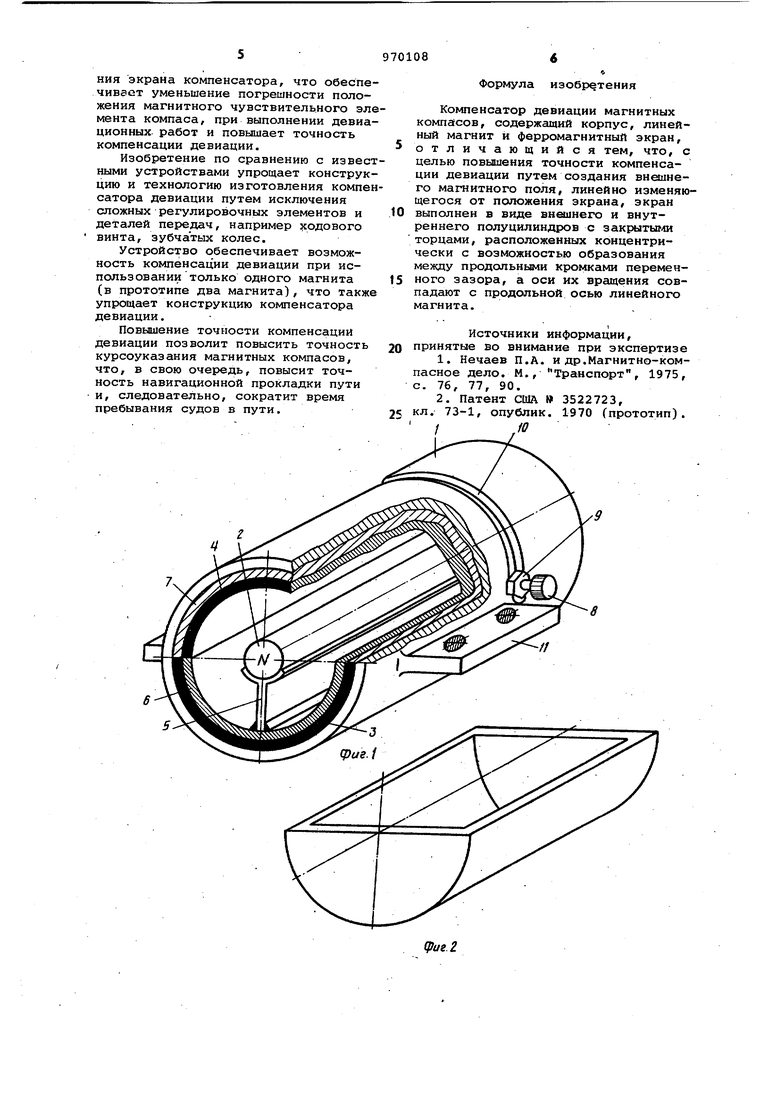
30 линейных магнита и два ферромагнитных экрана, охватывающих их. Изменение индукции внешнего поля линейных магнитов в указанном компенсато .осуществляется путем поступательного перемещения ферромагнитных экранов, охватывающих линейные постоянные магниты, в направлении продольной оси магнитов ,2. Недостатком компенсатора является также нелинейная зависимость индукции вн-ешнего поля .от переметения экрана, обусловленная неоднород ностью поля магнита вдоль его продольной оси. Нелинейность изменения индукции от положения экрана прийодит к погрешности компенсации де,виации. Цель изобретения - повглиение точ ности компендации девиации путем создания внешнего магнитного поля, линейно изменяющегося от положения экрана компенсатора. Указанная цель достигается тем, что компенсатор девиации магнитного компаса содержит корпус, линейный магнит и ферромагнитный экран, причем экран выполнен в виде внешнего и внутреннего полуцилиндров с закры тыми торцами, расположенных концент рически с возможностью образования между продольными кромками переменного зазора, а оси их вращения совпадают с продольной осью Линейного магнита. На фиг. 1 представлен компенсатор девиации, общий вид; на фиг. 2 концентрический полый ферромагнитный полуцилиндр экрана компенсатор общий вид; на фиг. 3-5 - компенсато при различных взаимных положениях неподвижного и подвижного полуцилиндров экрана компенсатора и разли ных зазорах между ними, разрез с торца, на фиг. б - судовой компас с компенсаторами полукруглой и креновой девиации, общий вид. Компенсатор девиации (фиг.1) состоит из цилиндрического корпуса 1 выполненного из немагнитного материала, линейного магнита 2 ферромагнитного экрана, образованного наружным полуцилиндром 3, неподвижно закрепленным внутри корпуса 1, и подвижным внутренним полуцилиндром 4. 1 Линейный магнит 2 закреплен на кронштейне 5, жестко связанном с неподвижным цилиндром 3. Размеры полуцилиндров 3-й 4, а также двух немагнитных полуцилиндров б и 7, вх дящих в конструкцию компенсатора, обеспечивает свободное перемещение подвижного полуцилиндра экрана 4 относительно его неподвижного полуцилиндра 3, Для обеспечения поворота подвижного цилиндра на нем жестко закреплена ручка 8 с контргайкой 9, а в корпусе 1 и полуцилиндре 7 выполнен паз 10 для ручки 8. Для крепления компенсатора внутри компаса на корпусе 1 имеются Два кронштейна 11. Полуцилиндры экрана 3 и 4 пред- . ставляют собой полые концентрические полуцилиндры с закрытыми торцами. Ось вращения подвижного полуцилиндра 4 (фиг.1) совпадает с продольной осью магнита 2. Между продольными кромками полуцилиндров 3 и 4 имеется переменный зазор 1 (фиг. 3-5). Его величина определяется положением внутреннего подвижного полуцилиндра 4 относительно неподвижного полуцилиндра 3. При взаимном положении полуцилиндров 3 и 4, показанном на фиг. 1, экран компенсатора замкнут, зазор С между полуцилиндрами 3 и 4 отсутствует, индукция внешнего магнитного поля компенсатора минимальна. При взаимном положении полуцилиндров 3 и 4, показанном на фиг. 5, экран компенсатора максимально разомкнут, зазор 1 между полуцилиндрами 3 и 4 максимальный и индукция внешнего магнитного поля компенсатора также максимальна. При взаимных положениях полуцилиндров 3 и 4, показанных на фиг. 3 и 4, зазор между ними и индукция магнитного поля компенсатора имеют промежуточные значения. На фиг, б показано размещение компенсаторов девиации в судовом магнитном компасе. Внутри нактоуза компаса 1 под его магни-тным чувствительным элементом расположены компенсатор 3 полукруговой девиации и компенсатор 4 креновой девиации. Кроме описанной конструкции компенсатора возможны другие варианты его исполнения, в которых внутренний полуцилиндр будет неподвижным, а наружный подвижным. Компенсатор девиации работает следующим образом. При компенсации девиации .компаса поворачивают подвижный полуцилиндр относительно неподвижного, изменяя величину зазора 6 между ними и, соответственно, индукцию внешнего магнитного поля до значения, соответствующего минимальной ошибке положения магнитного чувствительного элемента компаса. При этом значение индукции изменяется пропорционально изменению зазора мазкду полуцилиндрами компенсатора. При необходимости изменения знака индукции компенсатор девиации следует снять со штатного места и вновь закрепить, .повернув его на ISC . .Предлагаемое устройство обеспечивает линейную зависимость индукции внешнего магнитного поля от положения экрана компенсатора, что обеспе чивает уменьшение погрешности положения магнитного чувствительного эл мента компаса, при выполнении девиа ционных. работ и повышает точность компенсации девиации. Изобретение по сравнению с извес ными устройствами упрощает конструк цию и технологию изготовления компе сатора девиации путем исключения сложных регулировочных элементов и передач, например ходового винта, зубчатых колес. Устройство обеспечивает возможность компенсации девиации при использовании только одного магнита (в прототипе два магнита), что такж упрощает конструкцию компенсатора девиации. Повышение точности компенсации девиации позволит повысить точность курсоуказания магнитных компасов, что, в свою очередь, повысит точность навигационной прокладки пути и, следовательно, сократит время пребывания судов в пути. Формула изобретения Компенсатор девиации магнитных компагсов, содержащий корпус, линейный магнит и ферромагнитный экран, отличающийся тем, что, с целью повышения точности компенсации девиации путем создания вноинего магнитного поля, линейно изменяющегося от положения экрана, экран выполнен в виде внешнего и внутреннего полуцилиндров с закрытыми торцами, расположенных концентрически с возможностью образования между продольными кромками переменного зазора, а оси их вращения совпадают с продольной осью линейного магнита. Источники информации, принятые во внимание при экспертизе 1.Нечаев П.А. и др.Магнитно-компасное дело. М., Транспорт, 1975, с. 76, 77, 90. 2.Патент США 3522723, кл. 73-1, опублик. 1970 (прототип). / 10
физ.З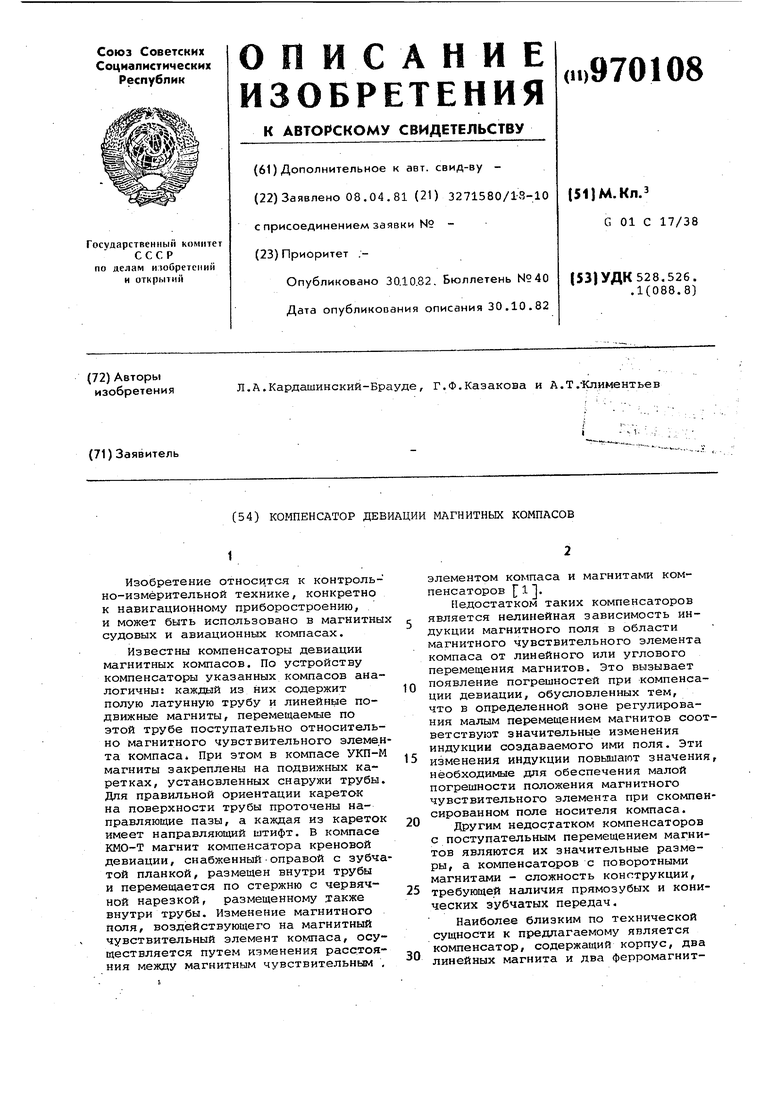
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2372587C1 |
| МАГНИТНЫЙ КОМПАС | 2001 |
|
RU2239787C2 |
| МАГНИТНЫЙ КОМПАС | 1999 |
|
RU2161776C2 |
| СПОСОБ УНИЧТОЖЕНИЯ ПОЛУКРУГОВОЙ ДЕВИАЦИИ НА ОДНОМ МАГНИТНОМ КУРСЕ | 2010 |
|
RU2442961C1 |
| БЕЗЫНДУКЦИОННЫЙ СДВОЕННЫЙ ШИРОТНЫЙ КОМПЕНСАТОР | 2001 |
|
RU2239786C2 |
| Устройство для определения полукруговой девиации компаса | 1977 |
|
SU742709A1 |
| МАГНИТНЫЙ КОМПАС | 2008 |
|
RU2364835C1 |
| СПОСОБ ЦИФРОВОЙ КОМПЕНСАЦИИ ЭЛЕКТРОМАГНИТНОЙ ДЕВИАЦИИ ДЛЯ МАГНИТНОГО ЭЛЕКТРОННОГО КОМПАСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2210060C2 |
| МАГНИТНЫЙ КОМПАС | 2006 |
|
RU2323413C1 |
| МАГНИТНЫЙ КОМПАС | 2007 |
|
RU2338157C1 |