Предлагаемое изобретение относится к области электрорадиоизмерений и может быть использовано для измерения постоянной составляющей сигнала, в составе которого присутствует n-ая гармоника, за малое время измерения, в том числе и за время, меньшее периода (полупериода) и некратное периоду первой гармоники сигнала, с повышенной точностью и помехоустойчивостью.
Известен способ измерения постоянной составляющей периодического сигнала, по которому независимо выделяют и усредняют значения полуволн положительной полярности сигнала, независимо выделяют и усредняют значения полуволн отрицательной полярности сигнала, непрерывно находят разности полученных величин для определения постоянной составляющей (см. а.с. СССР №951157, G 01 R 19/02).
Недостатком данного способа является низкое быстродействие, обусловленное тем, что нахождение постоянной составляющей может производиться не чаще, чем через период измеряемого сигнала, и невозможность точного определения постоянной составляющей при наличии в сигнале n-ой гармоники.
Известен способ, основанный на интегрировании измеряемого сигнала за время, равное периоду измеряемого гармонического сигнала и вычислении постоянной составляющей по результату интегрирования (см. кн. Ф.В. Кушнир. Электрорадиоизмерения: Учебное пособие для вузов. Л., - Энергоатомиздат, 1983, с.52).
Данный способ обеспечивает измерение постоянной составляющей сигнала с n-ой гармоникой при времени измерения, равном или кратном периоду первой гармоники сигнала. Однако при времени измерения, меньшем или некратном периоду первой гармоники сигнала, возникает большая систематическая погрешность, и измерение постоянной составляющей в этих условиях становится практически невозможным.
Наиболее близким по технической сущности к предлагаемому способу является способ, основанный на интегрировании за интервал времени, не связанный по длительности с периодом первой гармоники сигнала, не только самого измеряемого сигнала, но и косинусной составляющей опорного сигнала, квадрата косинусной составляющей опорного сигнала и произведения измеряемого сигнала на косинусную составляющую опорного сигнала. При этом интервал времени формируется симметрично относительно экстремума косинусной составляющей опорного сигнала (см. патент РФ №2196998, G 01 R 19/02).
В соответствии с данным способом результат измерения для гармонического сигнала представляется как
где 
при этом ξ (t) - измеряемый гармонический сигнал, Ти - время измерения (интегрирования), cosω 0t - косинусная составляющая опорного сигнала, т.е. гармонический сигнал, сформированный в измерителе, той же частоты, что и измеряемый сигнал (частота сигнала известна) и имеющий экстремум в середине измерительного интервала.
Данный способ обеспечивает оптимальное по критерию максимального правдоподобия измерение постоянной составляющей гармонического сигнала при произвольном времени измерения как кратном, так и некратном периоду первой гармоники этого гармонического сигнала. При этом обеспечивается минимально возможная случайная погрешность при воздействии на вход измерителя флуктуационного шума. Однако, при наличии в сигнале еще и n-ой гармоники, возникает большая систематическая погрешность, и измерение постоянной составляющей в этих условиях становится практически невозможным. Продемонстрируем сказанное следующим образом.
Измеряемый гармонический сигнал с учетом наличия шумовой составляющей и n-ой гармоники определится следующим выражением:

где Е0 - постоянная составляющая исследуемого сигнала, ω 0, Sm0, ϕ 0 - частота, амплитуда и фазовый сдвиг первой гармоники исследуемого сигнала, Smn0, ϕ n0 - амплитуда и фазовый сдвиг n-й гармоники сигнала, n - номер гармоники, присутствующей в сигнале, n(t) - флуктуационный шум, присутствующий совместно с полезным сигналом.
В идеальном случае при отсутствии шума - n(t)=0. Тогда, подставив (6) в (2), (3) и, взяв интегралы (2-5), результаты подставим в (1). Получим следующее выражение для измеренной постоянной составляющей:

где 


Как видно из (7), при Ти, равном или кратном периоду сигнала, - А=Е=F=0, тогда Еизм=Е0. Если же Ти меньше периода сигнала или не кратно периоду сигнала, то Еизм≠Е0, и возникает погрешность даже в случае отсутствия шума (систематическая погрешность).
В основу настоящего изобретения положена задача осуществления измерения постоянной составляющей сигнала гармонического вида при наличии в нем кроме первой еще и n-й гармоники, при времени измерения, менее и некратном периоду первой гармоники сигнала без систематической погрешности при априорно неизвестных фазовом сдвиге и амплитуде как первой, так и n-й гармоники измеряемого сигнала.
Поставленная задача решается тем, что в способе измерения постоянной составляющей гармонического сигнала, основанном на интегрировании за время измерения измеряемого сигнала и формировании сигнала ρ , интегрировании за время измерения результата перемножения измеряемого сигнала с косинусной составляющей опорного сигнала и формировании сигнала β , результата возведения в квадрат косинусной составляющей опорного сигнала и формировании сигнала β * , косинусной составляющей опорного сигнала и формировании сигнала ν * , согласно предлагаемому изобретению, дополнительно измеряемый сигнал перемножают с косинусной составляющей n-ой гармоники опорного сигнала и интегрируют, формируя сигнал ε , перемножают косинусную составляющую опорного сигнала с косинусной составляющей n-ой гармоники опорного сигнала и интегрируют, формируя сигнал ν , косинусную составляющую опорного сигнала возводят в квадрат и интегрируют, формируя сигнал ε * , косинусную составляющую n-й гармоники опорного сигнала интегрируют, формируя сигнал γ * , затем, с помощью полученных по результатам интегрирования восьми сигналов ρ , β , β * , ε , ε * , ν , ν * ,γ * вычисляют значение постоянной составляющей сигнала по формуле:

причем интервал времени симметричен относительно экстремума косинусной составляющей опорного сигнала и может быть произвольным по длительности, как меньше периода (полупериода), так и некратным периоду первой гармоники измеряемого сигнала.
Сущность предлагаемого способа можно пояснить следующим образом.
В соответствии с предлагаемым способом, постоянная составляющая сигнала вида (6) определяется по выражению (13), где ρ , β , β * , ν * определены в (2-5), а


где ξ (t) - измеряемый сигнал, представленный (6), Ти - время измерения (интегрирования), соsω 0t - косинусная составляющая опорного сигнала, т.е. гармонический сигнал, сформированный в измерителе, той же частоты, что и измеряемый сигнал (частота сигнала известна), и имеющий экстремум в середине измерительного интервала. С этим связано название “косинусная составляющая”опорного сигнала. Сигнал, имеющий нулевое значение в середине измерительного интервала - синусная составляющая опорного сигнала - в предлагаемом способе не используется, соsnω 0t - косинусная составляющая n-й гармоники опорного сигнала (синусная составляющая n-й гармоники опорного сигнала в предлагаемом способе также не используется).
Предлагаемый способ обеспечивает измерение постоянной составляющей сигнала вида (6) с систематической погрешностью, равной нулю, при произвольном времени измерения при априорно неизвестных амплитуде и фазовом сдвиге, как первой, так и n-й гармоник измеряемого сигнала. Для применения предлагаемого способа необходимо априорное знание только частоты измеряемого сигнала для формирования косинусной составляющей опорного сигнала и ее n-й гармоники. Чтобы убедиться в этом, найдем математическое ожидание результата измерения по предлагаемому способу. Для этого подставим в (13) измеряемый сигнал без шума (n(t)=0). Тогда для составляющих (2-5), (14-17) после взятия интегралов получим:








где А, С, D, E, F определяются (8-12), а
Подставив (18-26) в (13), получим Еизм=Е0, причем данное равенство справедливо для любого Ти, как кратного, так и некратного периоду гармонического сигнала, в том числе и для Ти меньше периода (полупериода) сигнала, и не зависит от амплитуды и фазового сдвига первой и n-ой гармоник (Sm0, ϕ 0, Smn0, ϕ n0) измеряемого сигнала.
Как видно из анализа, предлагаемый способ обладает принципиальным, по сравнению с прототипом, свойством - обеспечивает измерение постоянной составляющей сигнала без систематической погрешности при времени измерения, меньшем периода сигнала, или, в более общем случае, некратном периоду сигнала, при наличии в сигнале гармонического вида кроме первой еще и n-й гармоники.
При анализе случайной погрешности предлагаемого способа измерения постоянной составляющей можно показать с использованием функции правдоподобия для сигнала вида (6), что данный способ имеет минимально возможную погрешность, так как способ получен путем исследования функции правдоподобия и является, поэтому, оптимальным по критерию максимального правдоподобия для способов измерения параметров сигнала гармонического вида за время, менее или некратное периоду сигнала, при наличии в сигнале первой и n-ой гармоник и при воздействии флуктуационного шума.
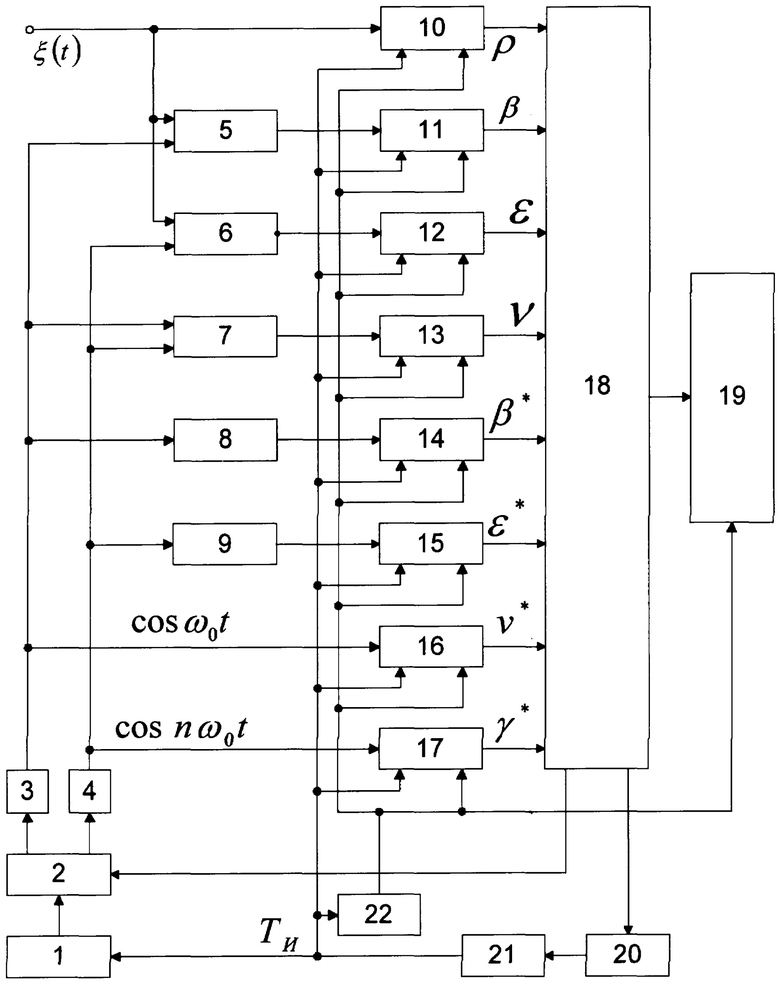
На фиг.1 приведена структурная схема одного из вариантов устройства, реализующего предлагаемый способ.
Устройство содержит тактовый генератор 1, блок памяти 2, цифроаналоговые преобразователи 3 и 4, перемножители 5, 6 и 7, квадраторы 8 и 9, интеграторы 10, 11, 12, 13, 14, 15, 16 и 17, вычислительный блок 18, индикатор 19, формирователь импульсов пуска 20, времязадающий элемент 21 и формирователь импульсов остановки 22. При этом тактовый генератор 1 выходом соединен с первым входом блока памяти 2, каждый из выходов которого соединен с входом цифроаналогового преобразователя соответственно 3 и 4, формирующих косинусную составляющую опорного сигнала и косинусную составляющую n-ой гармоники опорного сигнала. Выход цифроаналогового преобразователя 3 соединен с первыми входами перемножителей 5 и 7, с входом квадратора 8 и входом интегратора 16, выход цифроаналогового преобразователя 4 соединен с первым входом перемножителя 6, вторым входом перемножителя 7, с входом квадратора 9 и входом интегратора 17, вторые входы перемножителей 5 и 6 соединены с входом интегратора 10 и образуют вход для подачи измеряемого сигнала, выходы перемножителей 5, 6 и 7, квадраторов 8 и 9 соединены с входами интеграторов 11, 12, 13, 14 и 15 соответственно, а выходы всех интеграторов 10, 11, 12, 13, 14, 15, 16 и 17 соединены с соответствующими входами вычислительного блока 18, который, в свою очередь, основным выходом подключен к входу индикатора 19. Выход формирователя импульсов пуска 20 соединен с входом времязадающего элемента 21, выход которого соединен с первыми управляющими входами интеграторов 10, 11, 12, 13, 14, 15, 16 и 17 и является управляющим входом тактового генератора 1 и входом формирователя импульсов остановки 22, выход которого соединен с вторыми управляющими входами интеграторов 10, 11, 12, 13, 14, 15, 16 и 17 и с управляющим входом индикатора 19. Вычислительный блок 18 дополнительными управляющими выходами соединен с формирователем импульсов пуска 20 и со вторым входом блока памяти 2.
Способ реализуется следующим образом.
Момент начала измерения формируется формирователем импульсов пуска 20, работающего в ручном или автоматическом (под управлением вычислительного блока 18) режимах. Времязадающим элементом 21 формируется импульс, равный по длительности времени измерения Ти, который подают на управляющий вход тактового генератора 1, на первые управляющие входы интеграторов 10, 11, 12, 13, 14, 15, 16 и 17 и на вход формирователя импульсов остановки 22. В течение времени Ти тактовым генератором 1 осуществляется выборка значений опорного сигнала, записанных в блоке памяти 2, которые в цифровом виде по двум выходам поступают на входы цифроаналоговых преобразователей 3 и 4, на выходах которых и формируются аналоговые сигналы, являющиеся косинусной составляющей опорного сигнала с экстремумом в середине измерительного интервала и косинусной составляющей n-й гармоники опорного сигнала, поступающие затем на перемножители 5, 6 и 7, квадраторы 8 и 9 и интеграторы 16 и 17. Сигналы, являющиеся результатом перемножения измеряемого сигнала и косинусной составляющей опорного сигнала, измеряемого сигнала и косинусной составляющей n-ой гармоники опорного сигнала, возведения в квадрат косинусной составляющей опорного сигнала и косинусной составляющей n-ой гармоники опорного сигнала, а также косинусная составляющая опорного сигнала, косинусная составляющая n-ой гармоники опорного сигнала и сам измеряемый сигнал интегрируются в течение времени Ти. После окончания интегрирования результаты запоминаются на время, равное длительности импульса с выхода формирователя импульсов остановки 22, поступающего на вторые управляющие входы интеграторов 10, 11, 12, 13, 14, 15, 16 и 17 и индикатор 19. Сигналы с выходов интеграторов 10, 11, 12, 13, 14, 15, 16 и 17, которые в течение действия импульса на выходе формирователя импульсов остановки 22 постоянны во времени, подаются на соответствующие входы вычислительного блока 18, где происходит их перевод в цифровую форму и вычисление результата измерения по формуле (13). С выхода вычислительного блока 18 сигнал, являющийся результатом измерения, подается на индикатор 19, который фиксирует его и отображает до окончания следующего измерения. Вычислительный блок 18 может задавать момент начала следующего измерения для блока 20 и изменять содержимое блока памяти 2 в зависимости от требуемого количества выборок значений опорного сигнала и его n-й гармоники.
Используемые в устройстве, реализующем предлагаемый способ, узлы могут быть построены следующим образом.
Перемножители и квадраторы могут быть построены по схемам логарифмических функциональных генераторов (У. Титце, К. Шенк. Полупроводниковая схемотехника. М.: Мир, 1982, с.156). Интеграторы могут быть построены на основе операционных усилителей. Для обеспечения интегрирования в течение времени Tи применяются интеграторы с асинхронизацией и памятью. Схема такого интегратора приведена на с.144 в кн. У. Титце, К. Шенк. Полупроводниковая схемотехника. М.: Мир, 1982.
Индикатор может быть выполнен в виде последовательно включенных элемента выборки и хранения и стрелочного прибора. Элемент выборки и хранения можно реализовать на основе цифровых запоминающих устройств, а стрелочный прибор заменить на цифровой индикатор.
Формирователь импульса пуска может быть реализован по схеме снхронизируемого мультивибратора, а времязадающий элемент и формирователь импульсов остановки могут быть реализованы по схемам одновибраторов.
Вычислительный блок может быть реализован на основе микропроцессора Intel 80386 по типовой структуре с аналого-цифровыми преобразователями на входе.
Таким образом, предлагаемый способ решает поставленную задачу - измерение постоянной составляющей сигнала при любом по длительности времени измерения при наличии n-ой гармоники в сигнале, и физически реализуем в устройстве, приведенном в описании.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ ГАРМОНИЧЕСКОГО СИГНАЛА | 2000 |
|
RU2196998C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ ГАРМОНИЧЕСКОГО СИГНАЛА | 2005 |
|
RU2281519C1 |
| Способ определения амплитуды сигнала | 1989 |
|
SU1674003A1 |
| Способ определения фазового сдвига | 1987 |
|
SU1430904A1 |
| Способ определения фазового сдвига | 1988 |
|
SU1651227A2 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ АМПЛИТУДЫ СИГНАЛА | 2004 |
|
RU2280877C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ АМПЛИТУДЫ СИГНАЛА | 2000 |
|
RU2212676C2 |
| Способ измерения амплитуды сигнала | 1988 |
|
SU1564557A1 |
| Способ определения фазового сдвига | 1986 |
|
SU1377765A1 |
| Устройство изменения фазового сдвига | 1988 |
|
SU1647446A1 |
Изобретение относится к области электрорадиоизмерений. Способ включает интегрирование за время измерения измеряемого сигнала и формирование сигнала ρ. При этом дополнительно интегрируют произведение измеряемого сигнала и косинусной составляющей опорного сигнала, получая сигнал β, произведение измеряемого сигнала и косинусной составляющей n-й гармоники опорного сигнала, получая сигнал ∈, косинусную составляющую и квадрат косинусной составляющей опорного сигнала, получая сигналы ν* и β* соответственно, косинусную составляющую n-й гармоники и квадрат косинусной составляющей n-й гармоники опорного сигнала, получая сигналы γ* и ∈*, произведение косинусной составляющей опорного сигнала и косинусной составляющей n-й гармоники опорного сигнала, получая сигнал ν. По результатам интегрирования восьми сигналов ρ, β, β*, ∈, ∈*, ν, ν*, γ* вычисляют значение постоянной составляющей сигнала. Изобретение позволяет осуществлять измерение постоянной составляющей сигнала при любом времени измерения при априорно неизвестных амплитуде и фазовом сдвиге как первой, так и n-ой гармоник измеряемого сигнала. 1 ил.
Способ измерения постоянной составляющей сигнала, основанный на интегрировании за время измерения измеряемого сигнала и формировании сигнала ρ, интегрировании за время измерения результата перемножения измеряемого сигнала с косинусной составляющей опорного сигнала и формировании сигнала β, результата возведения в квадрат косинусной составляющей опорного сигнала и формировании сигнала β*, косинусной составляющей опорного сигнала и формировании сигнала ν*, причем интервал времени измерения симметричен относительно экстремума косинусной составляющей опорного сигнала и не связан по длительности с периодом первой гармоники измеряемого сигнала, отличающийся тем, что измеряемый сигнал дополнительно перемножают с косинусной составляющей n-ой гармоники опорного сигнала и интегрируют, формируя сигнал ε, перемножают косинусную составляющую опорного сигнала с косинусной составляющей n-ой гармоники опорного сигнала и интегрируют, формируя сигнал ν, косинусную составляющую опорного сигнала возводят в квадрат и интегрируют, формируя сигнал ε*, косинусную составляющую n-ой гармоники опорного сигнала интегрируют, формируя сигнал γ*, затем с помощью полученных по результатам интегрирования восьми сигналов ρ, β, β*, ε, ε*, ν, ν*, γ* вычисляют значение постоянной составляющей сигнала по формуле:

| СПОСОБ ИЗМЕРЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ ГАРМОНИЧЕСКОГО СИГНАЛА | 2000 |
|
RU2196998C2 |
| Способ определения постоянной составляющей сложного сигнала | 1990 |
|
SU1721525A1 |
| RU 94007749 A1, 27.04.1996 | |||
| Способ измерения постоянной составляющей периодического сигнала | 1983 |
|
SU1126888A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ПЕРЕМЕННОГО СМЕЩЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ В ДИСКРЕТИЗИРОВАННОМ СИГНАЛЕ | 1997 |
|
RU2187899C2 |
| US 4642564 А, 10.02.1987. | |||

