Snos(t) (t) S
Способ обеспечивает определение фазового сдвига с систематической погрешностью равной нулю. Для того, чтобы убедиться в этом, найдем миS«nSinnu)(,t, S....,(t) S.cosnuot. (14)
тематическое ожидание результата из- 55 мерения.
Для этого подставим в выражение (1) измеряемый сигнал 12 без шумов,т.е.
(t) (u)t,t + If о ) + 3„„ siH( ) (15)
1430904
I ч j u: и ч
Для составля щих (2-11), входяпщх в (1), получают
I
« s5 (1 - А) - S,.,cos4 ,,(C - (16)
- + . 1-ач;(С f n)j ; (17)
г -2 3,0 cos If Д С - D) + ,,( - В); (18)
1430904
I ч j u: и ч
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения фазового сдвига | 1988 |
|
SU1651227A2 |
| Способ определения амплитуды сигнала | 1989 |
|
SU1674003A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ СИГНАЛА | 2003 |
|
RU2239842C1 |
| Способ определения фазового сдвига | 1986 |
|
SU1377765A1 |
| Способ измерения амплитуды сигнала | 1986 |
|
SU1465786A1 |
| Способ измерения сдвига фаз | 1985 |
|
SU1310742A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ ГАРМОНИЧЕСКОГО СИГНАЛА | 2005 |
|
RU2281519C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОСТОЯННОЙ СОСТАВЛЯЮЩЕЙ ГАРМОНИЧЕСКОГО СИГНАЛА | 2000 |
|
RU2196998C2 |
| Способ измерения амплитуды сигнала | 1988 |
|
SU1564557A1 |
| Способ измерения сдвига фаз | 1985 |
|
SU1307382A1 |

Изобретение относится к области электрорадиоизмерений и может быть использовано для измерения в течение произвольно заданного интервала времени фазового сдвига сигналов, содержащих априорно известную п-ю гармонику основной частоты. Цель изобретения - повышение точности и быстродействия . Используя принцип квадратурной обработки сигналов, из одного входного сигнала, содержащего п-ю гармони- .ческую составляющую, и четырех gnop- ных сигналов (синусной и косинусной составлякшщх основной частоты и синусной и косинусной составляющих гармоники) формир тот с помощью операции перемножения десять вторичных сигналов. Затем сигналы интегрируют и, преобразовав в форму, удобную для вычислений, вычисляют уточненное значение фазового сдвига по формуле, приведенной в тексте описания. Кроме повышения точности за счет учета гармоники, повышается быстродействие, так как время интегрирования может быть много-меньше (в п раз) периода основной частоты. 4 ил.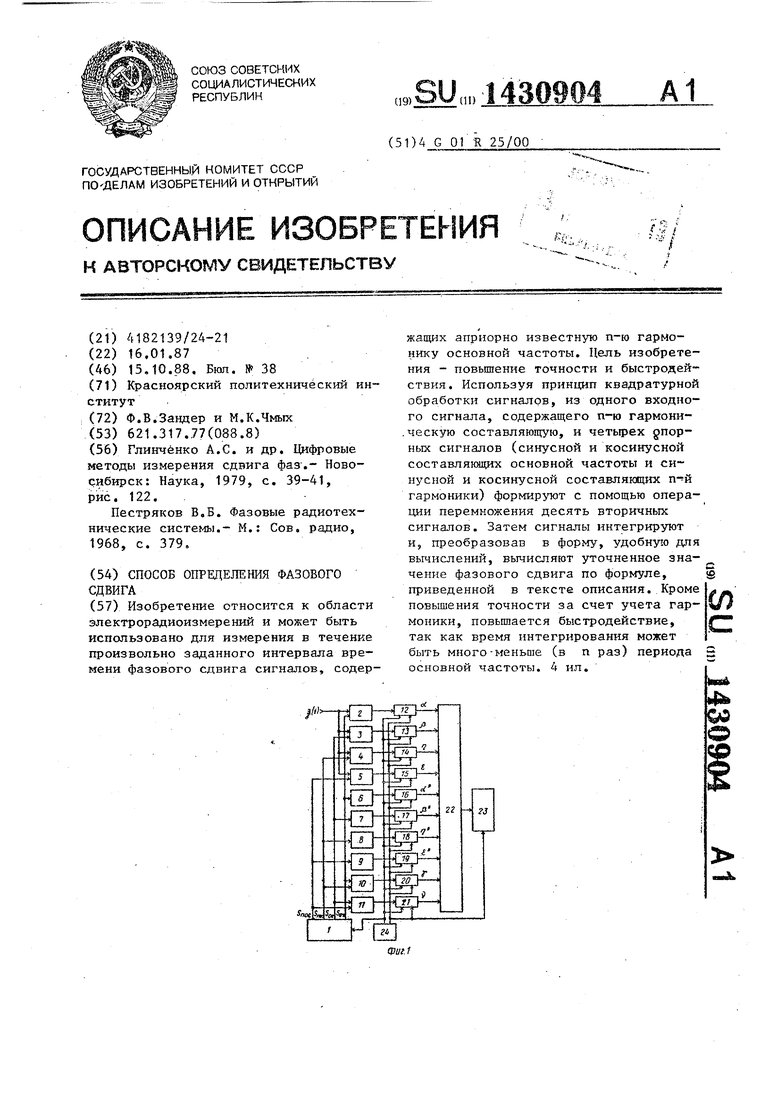
+ D). S sinlf./d + В); (19)
,
P
(1 + A);
Tn
. ( - B); E yd + B); 4e-D); -j(C + D),
sinu),)( 3innu3jTn /nWoTt,;
(n Т)от ;;72
D siEiS-± liWiTn /2. .
(n + 1)Uo 1/2
Если подставить (16-25) в (1), получают
Ч „з« ,(30)
причем данное равенство справедливо для любого Т, как кратного, так и некратного периоду сигнала, в том числе и для Т, меньшего периода сигнала.
Что касается случайной погрешности способа определения фазового сдвигвд то на основе исследования функции правдоподобия можно показать, что данньй способ имеет минимально возможную случайную погрешность из возможных способов определения фазового сдвига при времени измерения, меньшем периода сигнала или некратном периоду сигнала.
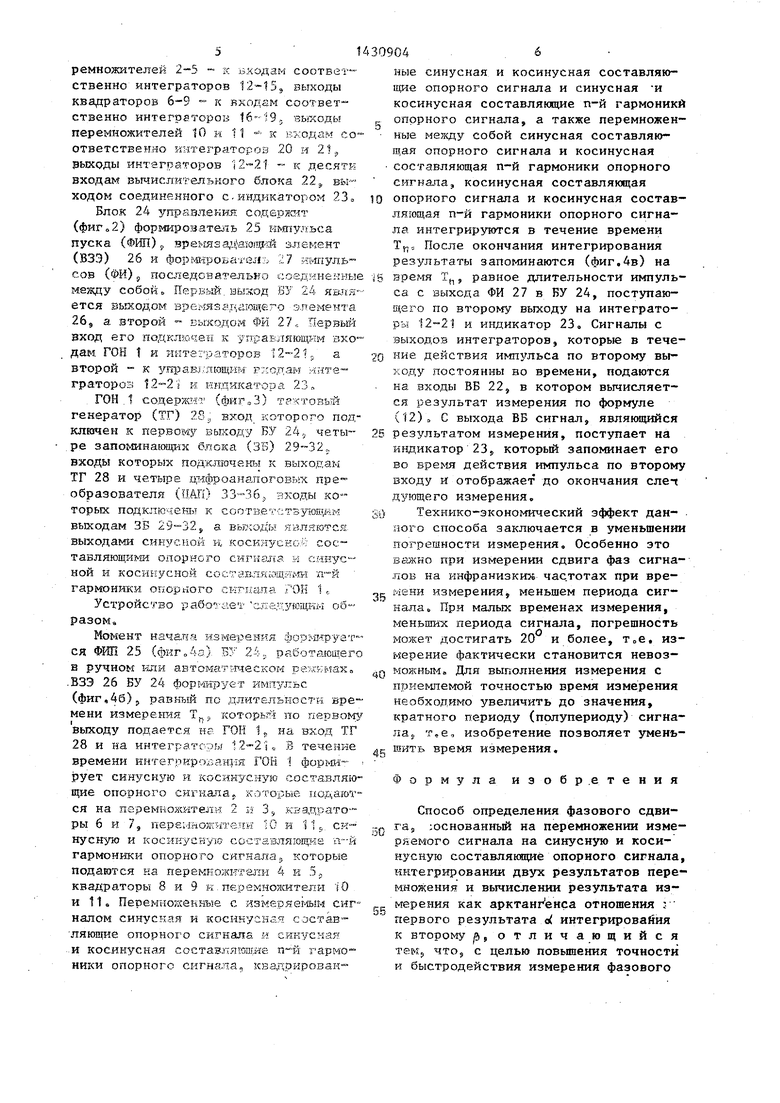
На фиг.1 приведена структурная схема одного из вариантов устройства, реализуннцего способ; на фиг.2 - вариант схемы блока управления на фиг.З вариант схемы генератора опорного
(21) (22 (23)
(24)
(25)
напряжения; на фиг.4 - временные дна30 граммы работы блока упранления.
Устройство, резлизу щее способ,, содержит генератор 1 опорного напря™ жения (ГОН) J перемножители 2-5,, ккад- раюры 6-9, перемк ожителт 10 и 11 „
- интеграторы 12--21, вьмкглнт.зльньм блок (ВБ) 22, и1-щ к:атор 23,, блок 24 управления (БУ), Hpii этом ГОН 1 опорного напряжения первыт.ч выходом., язля-- ющимся выходок С Гь:усной составлякщей
40 опорного сигнала.; подключен к первому входу перекножителя 2, входу квадратора 6 и пepвo tз входу перемнокЕгтеля to,, вторым выходом, явочяющьгмся выходом косинусной составля о11;ай опорного
45 сигнала,- к nepBoi iy входу перемножнтеля
входу квадратора 7- и первому
входу перемкожителя 11 j третьим зыхо- дом, являющимся выходом CHS-r CHoii составляющей п-и rapffOHHKH опорного сиг рд нала к первому- входу перемкохчите- ля 4, входу квндратора 8 и второ {у в входу пepe ffloжитeля 10 четвертьм выходом,, являющимся ВЫХ.ОДОМ КОСИ1ТУСНОЙ
есставляюшей гармоники опорного сигнала,- к первому входу перемножителя 5, входу квадратора 9 и второму входу перемножителя 11. Вторые входы перемножителей 2-5 подклаочень к шине измеряемого сигнала, выходы пе55
Первьгй, вькод ВУ 24 явля
ремножителей 2-5 - к входам соответственно интеграторов 12-t5s выходы квадраторов 6-9 - к входам соответ ственно интеграторов вьжоды перенножителай 10 и II к входам соответственно кнтегратороз 20 и 21,, эькоды интеграторов - к десяти входам вычислит-елького блока 22 j, вы-- ходок соединенного с.индикатором 23
Блок 24 управления содерлшт (фиг,2) формирователь 25 кш}ульса пуска (ФИЛ);, вре газад ающ-кй злекент (ВЗЭ) 26 и фор 4КрОБа- ; ал:ь 27 И1«1пуль сов (ФИ)р последовательнс между собой
ется выходом вре стзадающего элемента 265 а второй выходом ФИ 27,. Первьй вход его подключен к -угграЕЛяющкм входам ГОН t и иктеграторов 12-21;. а второй - к ущ:1ав.1.;лющим р:;одам хснте- гратороз 12-2 I и индикатора 23 „
ГОН . 1 со.цержит (фиГаЗ) ТРКТОВЬЙ генератор (ТГ) 28.; вход которого подключен к первому вькоцу БУ 24.j четы- .ре запоминающих блока (ЗБ) 29.32,., входы которых подключеш к выходам ТГ 28 и четыре цифроанапоговых преобразователя (.Ш1) зкоды которых подклкзчены к соотв.ет.гтвующик выходам ЗБ 29-32J, а вькодк являются выходами синусной н, косккусной составляющими опорного сигь зла я с.ииус ной и косинусной составляющими гap юники огюрного сигнала ГОК 1 „
Устройство рабо-Х ает следукщк - образом,
Момент качана изг ерения фор 1Ируат- ся ФИЛ 25 (фкг„4з) БЗ 24,, работг ао1него в ручном или автоматическом реккиах, .ВЗЭ 26 БУ 24 форг щэует импульс (фиг.Аб),, равный по длителы-гости времени измереьгая , которкй по первому выходу подается на ГОН 1 , на вход ТГ 28 и на интеграторы 12-21... В течение времени интегрироващия ГОН 1 форми- рует синусную и косинусную состав.пяю щие опорного сигнала кото.рые подаются на перемножител.и: 2 jj 3. квадраторы 6 и 7, переинойштели 10 и 11 синусную и косинусную составляющие п-й гармоники опорного сигналаj которые подаются ка переккожктели 4 и 5, квадраторы 8 и 9 к. перемноясители 10 и 11. Перемноксекнъ е с измеряе№М сигналом синуска.я н косикусна.я состав™ ляющие опорного сигнала .и с.икусная и косинусная составляющ.ие гармоники опорного сигнала, квадрирован5
ные синусная и косинусная составляю- 111ие опорного сигнала и синусная -и косинусная составляющие п-й гармоники опорного сигнала, а также перемноженные между собой синусная составляющая опорного сигнала и косинусная составляющая п-й гармоники опорного сигнала, косинусная составляющая
10 опорного сигнала и косинусная составляющая п-й гармоники опорного сигнала интегрируются в течение времени Tf5 После окончания интегрирования результаты запоминаются (фиг.4в) на
3 соединенные jg время Т, равное длительности импульса с выхода ФИ 27 в БУ 24, поступающего по второму выходу на интеграторы 12-21 и индикатор 23, Сигналы с выходов интеграторов, которые в тече20 ние действия импульса по второму выходу постоянны но времени, подаются на входы ВБ 22, в котором вычисляется результат измерения по формуле (12)„ С выхода ВБ сигнал, являющийся
25 результатом измерения, поступает на индикатор 235 который запоминает его во время действия импульса по второму входу и отображает до окончания слет дующего измерения,
gi) Технико-экономический эффект данного способа заключается в уменьшении погрешности измерения. Особенно это важно при измерении сдвига фаз сигналов на инфранизких час.тотах при вре-
ос мени измерения, меньшем периода сигнала При малых временах измерения, меньших периода сигнала, погрешность мо.жет достигать 20 и более, Тов. измерение фактически становится невоз(,Q мойчным. Для выполнения измерения с приемлемой точностью время измерения необходимо увеличить до значения, кратного периоду (полупериоду) сигнала j т,е, изобретение позволяет уменъ шить время измерения.
50
55
Формула изобр.етения
Способ определения фазового сдвига, ;основанный на перемножении измеряемого сигнала на синусную и косинусную составлякщиё опорного сигнала, интегрировании двух результатов перемножения и вычислении результата измерения как арктанг енса отношения ; первого результата о интегрировайия к второму j,, отличающийся текр что, с целью повышения точности и быстродействия измерения фазового
ормула изобр.етения
Способ определения фазового сдвига, ;основанный на перемножении измеряемого сигнала на синусную и косинусную составлякщиё опорного сигнала, интегрировании двух результатов перемножения и вычислении результата измерения как арктанг енса отношения ; первого результата о интегрировайия к второму j,, отличающийся текр что, с целью повышения точности и быстродействия измерения фазового
сдвига при наличии априорно известной п-й гармоники в сигнале, измеряемьй сигнал дополнительно перемножают с синусной и косинусной составляющими п-й гармоники опорного сигнала и интегрируют, формируя соответственно сигналы (х. и Е , синусную и косинусную составляющие опорного сигнала и синусную и косинусную составляющие п-й гармоники опорного сигнала возводят в квадрат и интегрируют, формируя соответственно сигналы / /3, 1 и f, синусную составлякщую опорного сигна- та и синусную составляющую п-й гармо -5
ники опорного сигнала перемножают . меящу собой и интегрируют, формируя сигнал } , косинусную составляющую опорного сигнала и косинусную составляющую п-й гармоники опорного сигнала также пере шожают мен;цу собой и интегрируют, формируя сигнал ) , затем с помощью полученных десяти сигналов по результатам интегрирований вычисляют значения фазового сдвига по формуле ;
()( У г) с/ arctg tpp™ )
i/г2
75
cpus.S
фи&Л
| Глинчёнко А.С | |||
| и др | |||
| Цифровые методы измерения сдвига фаз .- Новосибирск: Наука, 1979, с | |||
| Машина для изготовления проволочных гвоздей | 1922 |
|
SU39A1 |
| Схема обмотки ротора для пуска в ход индукционного двигателя без помощи реостата, с применением принципа противосоединения обмоток при трогании двигателя с места | 1922 |
|
SU122A1 |
| Пестряков В.Б | |||
| Фазовые радиотехнические системы.- М.: Сов | |||
| радио, 1968, с | |||
| Дальномер | 1922 |
|
SU379A1 |
