Изобретение относится к управлению гидравлическими манипуляторами, применяемыми, например, для перегрузочно-технологических работ и для работ со штучными и затаренными грузами.
Известна электрогидравлическая система управления стрелового самоходного крана, содержащая, в частности, гидродвигатели с дистанционным управлением, средство для разгрузки гидросистемы, реле давления и другие элементы (см. RU 2078021, МПК6 В 66 С 23/00, 1997).
Технический недостаток известной системы управления: повышенная конструктивно-схемная сложность и, как следствие, усложнение алгоритма управления и снижение надежности при ограниченной области применения.
Известно также устройство для управления гидравлическим манипулятором, содержащее два гидроцилиндра поворота плеча, гидроцилиндр поворота предплечья, золотники и гидролинии, предназначенные для сообщения полостей гидроцилиндров с источником давления и со сливной магистралью (RU 2028929, МПК7 В 25 J 13/00, 9/14, 9/20, 1995).
Технический недостаток данного устройства: отсутствие средств независимого и автоматизированного управления гидроцилиндрами, нерациональный силовой поток в звеньях манипулятора и ограниченная зона действия рабочего органа из-за невозможности разворота плеча и предплечья в горизонтальной плоскости.
Техническая задача: обеспечение независимого и автоматизированного управления гидроцилиндрами при рациональном силовом потоке в звеньях манипулятора и расширение зоны действия рабочего органа.
Для этого устройство снабжено дополнительным гидроцилиндром поворота предплечья, гидроцилиндры поворота плеча расположены под углом друг к другу, их штоки соединены между собой в шарнирном узле, посредством которого цилиндры закреплены на плече и шарнирно связаны с цилиндрами предплечья, золотники выполнены в виде электроуправляемых кранов, сгруппированных в функциональные блоки таким образом, что каждый цилиндр плеча и цилиндры предплечья снабжены двумя парами крестообразно управляемых кранов, сообщающихся соответственно с общими нагнетательным и сливным каналами, при этом краны дополнительно попарно гидравлически соединены между собой, а цепи управления электродвигателя источника давления снабжены переменным сопротивлением и тиристорным регулятором частоты вращения.
Наряду с этим плечо и предплечье выполнены в виде шарнирно-стержневых ферм; электродвигатель выполнен с последовательным возбуждением; элементы включения каждой пары электроуправляемых кранов сблокированы с цепью управления электродвигателем.
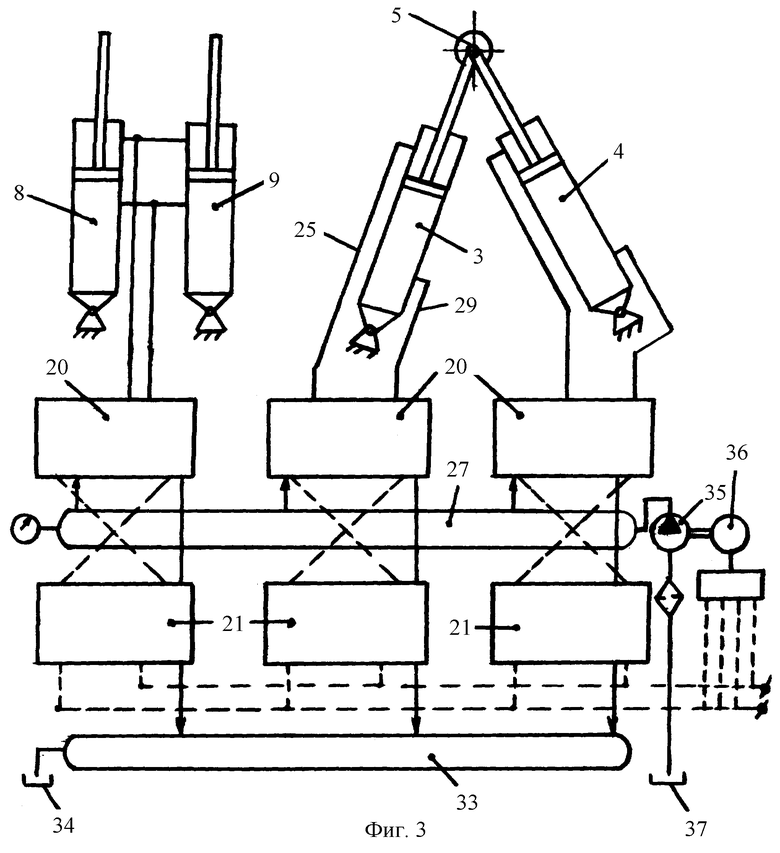
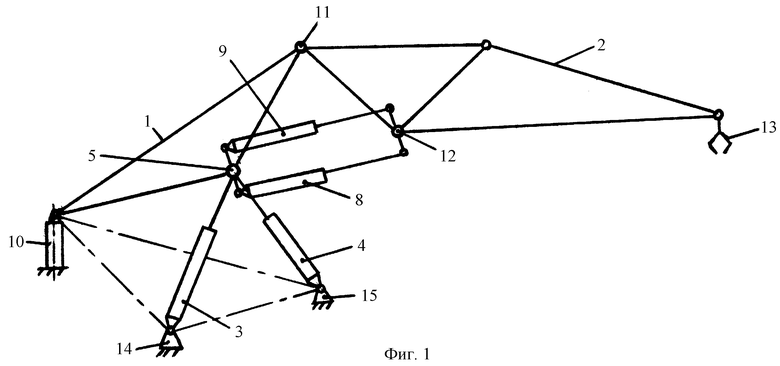
На фиг.1 изображен общий вид гидравлического манипулятора; на фиг.2 - шарнирный узел для соединения между собой и с плечом гидроцилиндров плеча и предплечья; на фиг.3 - блок-схема управления гидравлическим манипулятором; на фиг.4 - развернутая электрогидравлическая схема управления манипулятором.
Гидравлический манипулятор (фиг.1 и 2) включает шарнирно соединенные между собой плечо 1 и предплечье 2. Для поворота плеча и всей системы плечо-предплечье предусмотрены два гидроцилиндра 3 и 4. Эти цилиндры расположены под углом друг к другу, их штоки соединены между собой в шарнирном узле 5, посредством которого цилиндры закреплены на элементах 6 и 7 плеча. Для поворота предплечья манипулятор снабжен дополнительным гидроцилиндром, вследствие чего для предплечья предусмотрено два параллельно действующих гидроцилиндра 8 и 9. Эти цилиндры своими корпусами шарнирно связаны с цилиндрами 3 и 4 плеча посредством того же шарнирного узла 5. Плечо 1 и предплечье 2 выполнены в виде шарнирно-стержневых ферм. Узлы ферм совмещены: с опорно-поворотным устройством 10 с двумя степенями свободы для крепления плеча на основании; с указанным шарнирным узлом 5; с шарниром - связью 11 плеча и предплечья; шарниром 12 для соединения предплечья с гидроцилиндрами 8 и 9; концевым узлом предплечья, несущим на себе рабочий орган 13. Шарниры 14 и 15 крепления корпусов цилиндров 3 и 4 на основании имеют две степени свободы. Параллельно действующие гидроцилиндры 8 и 9 - это одно кинематическое звено гидравлического манипулятора, одноименные полости этих цилиндров соединены между собой.
Золотники выполнены в виде электроуправляемых двухпозиционных кранов 16-19, которые сгруппированы в функциональные блоки 20 и 21. Схему независимого и автоматизированного управления каждым гидроцилиндром манипулятора - цилиндрами 3 и 4 поворота плеча и цилиндрами 8 и 9, как одного кинематического звена, поворота предплечья - раскроем на примере управления одним цилиндром 3, имея в виду, что управление остальными цилиндрами идентично (фиг.3 и 4). В функциональных блоках 20 и 21, предназначенных для управления одним цилиндром, размещены соответственно электроуправляемые краны 16 и 17 в верхнем блоке 20 и краны 18 и 19 в нижнем блоке 21. Кран 16 блока 20 и кран 19 блока 21, а также кран 17 блока 20 и кран 18 блока 21 являются крестообразно управляемыми - их электрические элементы соединены между собой соответственно электролиниями 22 и 23.
Кран 16 блока 20 гидравлическими линиями 24, 25 и 26 соединен соответственно с нагнетательным каналом 27, штоковой полостью гидроцилиндра 3 и с краном 18 блока 21. Кран 17 блока 20 гидролиниями 28, 29 и 30 соединен с тем же каналом 27, поршневой полостью гидроцилиндра 3 и с краном 19 блока 21. Следовательно, краны 16 и 18, 17 и 19 дополнительно попарно гидравлически соединены между собой. Наряду с этим краны 18 и 19 блока 21 гидролиниями 31 и 32 сообщаются со сливным каналом 33, из которого, в свою очередь, рабочая жидкость сбрасывается в бак 34. Нагнетательный канал 27 запитывается от источника давления - гидронасоса 35, который имеет привод от электродвигателя 36. Забор рабочей жидкости из бака 37 (конструктивно баки 34 и 37 могут быть выполнены как одно целое) насос производит через фильтр 38; в линии подачи жидкости предусмотрен предохранительный клапан 39.
Электродвигатель 36 переменного тока выполнен с последовательным возбуждением и не имеет стабилизированной частоты вращения. Цепь управления двигателем включает обмотку возбуждения 40, последовательно соединенную с якорем двигателя. Цепь управления электродвигателем 36 снабжена также переменным сопротивлением 41 и тиристорным регулятором частоты вращения 42. Элементы электроуправления гидравлическим манипулятором представляют собой кнопки управления 43 и 44 - по две кнопки на каждую пару блоков 20 и 21 или по одной кнопке на каждую функцию гидравлического управления одним гидроцилиндром 3 и 4 или двумя цилиндрами 8 и 9 как одним кинематическим звеном. Все кнопки, а также упомянутое сопротивление 41 смонтированы в общем электрическом пульте управления 45. В пульте проложены электролинии управления 46 и 47, нулевая линия (фаза ноль) 48 и линия электропитания 49. Кнопки управления 43 и 44 имеют двойные контакты, при замыкании которых включаются линии управления 46 и 47, дополнительно к этому каждая кнопка соединена с нулевой линией 48. Электрический пульт соответствующими электролиниями соединен с источником переменного тока 50, снабженным предохранителем 51, и с тиристорным регулятором 42. От источника тока отходит также фазная электролиния 52, соединенная со второй фазой электролинии 53 и 54 подачи напряжения на электроэлементы крестообразного управления кранами 16-19. Такие соединения электрических линий и элементов обеспечивают блокирование каждой пары электроуправляемых кранов 16 и 19, 17 и 18 между собой и с цепью управления электродвигателем 36 посредством пульта 45. Устройство содержит и некоторые другие элементы, показанные на фиг.1-4.
Устройство для управления гидравлическим манипулятором работает следующим образом.
При синхронном изменении длины - перемещении штока с поршнем - гидроцилиндров 3 и 4 плечу 1 вместе с предплечьем 2 сообщается поворот в вертикальной плоскости. При работе только одного гидроцилиндра 3 или 4 плечо 1 с предплечьем 2 разворачиваются в горизонтальной плоскости, сопровождающимся некоторым изменением угла возвышения в вертикальной плоскости. Если шток одного гидроцилиндра, например цилиндра 3, выдвигается, а шток другого гидроцилиндра, например цилиндра 4, втягивается, то плечо 1 вместе с предплечьем 2 разворачиваются практически горизонтально. Углы поворота плеча 1 в вертикальной плоскости имеют обычные значения, а в горизонтальной плоскости достигают +75° (суммарно 150°). Дополнительная зона действия рабочего органа 13 достигается за счет поворота предплечья 2 в шарнире 11 - относительно плеча 1 посредством изменения длины гидроцилиндров 8 и 9. При эволюциях относительно основания плечо 1 разворачивается в двух взаимно перпендикулярных направлениях в опорно-поворотном устройстве 10 с двумя степенями свободы, а шарниры 14 и 15 с двумя степенями свободы обеспечивают необходимые подвижности корпусов гидроцилиндров 3 и 4 относительно основания. Одновременно с этим в шарниром узле 5 происходят взаимные перемещения штоков гидроцилиндров 3 и 4 друг относительно друга, относительно элементов 6 и 7 плеча 1 и относительно корпусов гидроцилиндров 8 и 9. Таким образом, достигается расширение зоны действия рабочего органа 13 путем поворота плеча 1 с предплечьем 2 как в вертикальной, так и в горизонтальной плоскости при работе одних и тех же расположенных под углом друг к другу гидроцилиндров 3 и 4. Наряду с этим обеспечивается рациональный силовой поток за счет передачи усилий от гидроцилиндров 8 и 9 поворота предплечья на гидроцилиндры 3 и 4 и далее на основание. Рациональному силовому потоку способствует и выполнение плеча 1 и предплечья 2 в виде шарнирно-стержневых ферм, а также наличие двух параллельно расположенных гидроцилиндров 8 и 9 для поворота предплечья 2, благодаря чему удается присоединить эти цилиндры к общему шарнирному узлу 5, а их штоки совместить с шарниром 12 предплечья. В итоге основные звенья гидравлического манипулятора - гидроцилиндры и стержни плеча и предплечья - воспринимают рациональные усилия растяжения и сжатия.
Электрический пульт управления 45, электрическая и гидравлическая схемы манипулятора (фиг.3 и 4) обеспечивают независимое и автоматизированное управление гидроцилиндрами 3,4 и параллельными (как одно кинематическое звено) гидроцилиндрами 8 и 9, причем каждый из цилиндров 3 или 4 и пара цилиндров 8, 9 могут быть задействованы как отдельно, так и совместно. Алгоритм управления гидроцилиндрами раскроем на примере управления цилиндром 3. При наличии напряжения в источнике переменного тока 50 включают, например, кнопку управления 43 (с двойными контактами) пульта 45, вследствие чего задействуют электролинии управления 46 и 47 (нулевая линия 48, линия электропитания 49 и фазная электролиния 52 находятся под напряжением). После этого электрический сигнал по электролинии 53 поступает на электрические элементы электроуправляемого крана 19 и крестообразно связанного с ним (электролинией 22) крана 16. Поскольку элементы включения каждой пары электроуправляемых кранов (в данном случае кранов 16 и 19) сблокированы с цепью управления электродвигателем 36 (через тиристорный регулятор частоты вращения 42 и обмотку возбуждения 40), то включение любой кнопки на пульте управления 45 является также сигналом на запуск электродвигателя 36. Последний приводит во вращение гидронасос 35, который посредством фильтра 38 забирает рабочую жидкость из бака 37 и нагнетает ее в нагнетательный канал 27. Оттуда жидкость по гидролинии 24 поступает в открытый кран 16 блока 20 и далее по гидролинии 25 нагнетается в штоковую полость гидроцилиндра 3, вызывая перемещение поршня со штоком. Из поршневой полости этого цилиндра по гидролинии 29 жидкость, минуя закрытый кран 17, поступает в гидролинию 30, в открытый кран 19 блока 21 и с помощью гидролинии 32 сбрасывается в сливной канал 33, оттуда - в бак 34, сообщающийся с баком 37.
Для перемещения поршня со штоком в противоположную сторону отпускают кнопку управления 43 и включают другую кнопку 44, и посредством электролиний 54 и 23 задействуют электроуправляемые краны 18 и 17. После этого рабочая жидкость из нагнетательного канала 27 по гидролинии 28 поступает в открытый кран 17 блока 20, а оттуда по гидролинии 29 - в поршневую полость гидроцилиндра 3. Из штоковой полости этого цилиндра жидкость поступает в гидролинию 25, посредством гидролинии 26 “обходит” закрытый кран 16 и поступает в открытый кран 18 блока 21, далее посредством гидролинии 31 сбрасывается в сливной канал 33, а оттуда - в бак 34, сообщающийся с баком 37. Таким образом, предусмотренные для каждой функции управления одна кнопка в пульте 45 и два крестообразно управляемых крана в блоке 20 рабочего давления и в блоке 21 давления слива обеспечивают независимое и автоматизированное параллельное или последовательное задействование гидроцилиндров.
Для плавного и бесступенчатого регулирования подачи рабочей жидкости насосом 35, а следовательно, регулирования скорости перемещения штоков с поршнями гидроцилиндров 3, 4, 8, 9 производят регулирование частоты вращения якоря электродвигателя 36. Для этого задействуют переменное сопротивление 41 в пульте управления 35 и изменяют силу тока в цепи якоря двигателя. Обмотка возбуждения 40, последовательно соединенная с якорем электродвигателя 36, создает магнитный вращающий момент при взаимодействии с магнитным полем якоря. Изменяемая сила переменного тока и последовательное возбуждение электродвигателя в комплексе с тиристорным регулятором 42 обеспечивают плавное и бесступенчатое изменение частоты вращения вала двигателя и вращающего момента на валу. Увеличение частоты вращения приводит и к увеличению вращающего момента, а следовательно, и к увеличению мощности двигателя (в определенных пределах). Увеличение частоты вращения насоса 35 приводит к увеличению подачи жидкости в гидроцилиндры, это, в свою очередь, приводит к возрастанию мощности на валу насоса; электродвигатель 36 дает эту возможность. Двигатель 36 и насос 35 работают в экономичном режиме - включаются только при воздействии на одну или несколько кнопок пульта 45. Когда все кнопки отпущены, размыкается цепь управления электродвигателем 36, и отпадает надобность в непроизводительном сбросе жидкости в бак 37 посредством предохранительного клапана 39. Но для непредвиденных ситуаций в электрической схеме предусмотрен предохранитель 51, а в гидравлической схеме - упомянутый клапан.
На основании изложенного можно сделать вывод, что устройство обеспечивает независимое и автоматизированное управление гидроцилиндрами при рациональном силовом потоке в звеньях гидравлического манипулятора и расширение зоны действия рабочего органа.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕКРЫТИЯ ТРУБОПРОВОДА | 2003 |
|
RU2245482C2 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| КРАН-МАНИПУЛЯТОР | 2005 |
|
RU2312057C2 |
| СПОСОБ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ МАНИПУЛЯТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1986 |
|
RU2028929C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕКРЫТИЯ ТРУБОПРОВОДА | 2002 |
|
RU2220362C1 |
| РАБОЧЕЕ ОБОРУДОВАНИЕ ДОРОЖНОЙ МАШИНЫ | 2019 |
|
RU2729534C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2274559C1 |
| НАСОСНАЯ УСТАНОВКА НАГНЕТАТЕЛЬНАЯ, ОБЪЕМНАЯ, РЕГУЛИРУЕМАЯ | 2008 |
|
RU2380570C1 |
| Электрогидравлическая система привода двустворчатых ворот шлюза | 1989 |
|
SU1680858A1 |
| ПЕРЕДВИЖНАЯ УСТАНОВКА ДЛЯ ЗАПРЕССОВКИ ПОДШИПНИКОВ | 2003 |
|
RU2246390C2 |


Изобретение относится к управлению гидравлическими манипуляторами, применяемыми, например, для перегрузочно-технологических работ и для работ со штучными и затаренными грузами. Устройство содержит два гидроцилиндра поворота плеча, гидроцилиндр поворота предплечья, золотники и гидролинии, предназначенные для сообщения полостей гидроцилиндров с источником давления и со сливной магистралью. Устройство снабжено дополнительным гидроцилиндром поворота предплечья. Гидроцилиндры поворота плеча расположены под углом друг к другу, их штоки соединены между собой в шарнирном узле, посредством которого цилиндры закреплены на плече и шарнирно связаны с цилиндрами предплечья. Золотники выполнены в виде электроуправляемых кранов, сгруппированных в функциональные блоки таким образом, что каждый цилиндр плеча и цилиндры предплечья снабжены двумя парами крестообразно управляемых кранов, сообщающихся соответственно с общими нагнетательным и сливным каналами. При этом краны дополнительно попарно гидравлически соединены между собой, а цепи управления электродвигателя источника давления снабжены переменным сопротивлением и тиристорным регулятором частоты вращения. Изобретение позволит обеспечить независимое и автоматизированное управление гидроцилиндрами при рациональном силовом потоке в звеньях манипулятора и расширить зону действия рабочего органа. 3 з.п. ф-лы, 4 ил.
| СПОСОБ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ МАНИПУЛЯТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1986 |
|
RU2028929C1 |
| Способ управления рабочим органом грузоподъемного устройства | 1985 |
|
SU1346420A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СИСТЕМА УПРАВЛЕНИЯ СТРЕЛОВОГО САМОХОДНОГО КРАНА | 1995 |
|
RU2078021C1 |
| Способ приготовления сернистого красителя защитного цвета | 1921 |
|
SU84A1 |

