Изобретение относится к управлению гидравлическими манипуляторами, применяемыми, например, в лесной промышленности для подачи лесоматериалов к деревообрабатывающим станкам или подачи захватно-срезающего устройства к стволу спиливаемого дерева и перемещения его в зону разгрузки в пакет, штабель или на транспортное средство.
Известен способ управления гидравлическим манипулятором для перемещения рабочего органа по траектории, близкой к пpямолинейной, заключающийся в изменении траектории движения рабочего органа в пространстве за счет совместного регулирования угловых перемещений плеча и предплечья путем одновременной подачи рабочей жидкости гидроцилиндра поворота плеча в одноименную полость гидроцилиндра поворота предплечья или наоборот [1].
Известно устройство для управления гидравлическим манипулятором для перемещения рабочего органа по траектории, близкой к прямолинейной, содержащее основной гидроцилиндр поворота плеча и гидроцилиндр поворота предплечья, гидролинии, предназначенные для сообщения полостей гидроцилиндров между собой, с источником давления и со сливной магистралью [2].
Недостатками известных способа и устройства является сложность операций, связанных с измерениями, вычислениями координат и углов для того, чтобы обеспечить перенос рабочего органа по траектории, близкой к прямолинейной. В них требуется использовать ЭВМ, не исключая при этом и ручное управление рычагами и переключателями.
Цель изобретения - упрощение процесса управления, конструкции устройства и повышение удобства в управлении перемещением рабочего органа в пространстве по траектории, близкой к прямолинейной.
Это достигается тем, что подачу рабочей жидкости из полости гидроцилиндра поворота плеча в одноименную полость гидроцилиндра поворота предплечья осуществляют при выполнении следующих условий: =
=  = 2 где λ1 и λ2 - угол поворота плеча и предплечья при переносе рабочего органа по траектории, близкой к прямолинейной;
= 2 где λ1 и λ2 - угол поворота плеча и предплечья при переносе рабочего органа по траектории, близкой к прямолинейной;
F1 и F2 - соответственно площади одноименных полостей гидроцилиндров поворота плеча (суммарная для основного и дополнительного) и поворота предплечья.
В устройстве для управления гидравлическим манипулятором поставленная цель достигается тем, что он снабжен дополнительным гидроцилиндром поворота плеча, причем одноименные полости обоих гидроцилиндров поворота плеча сообщены гидролиниями с соответствующей полостью гидроцилиндра поворота предплечья, при этом площади сечений одноименных полостей всех гидроцилиндров равны.
На фиг. 1 изображена гидравлическая схема манипулятора; на фиг.2 - кинематическая схема манипулятора.
Устройство для осуществления способа содержит основной 1 и дополнительный 2 гидроцилиндры поворота плеча 3 и гидроцилиндр 4 поворота предплечья 5, на конце которого установлен рабочий орган 6. Полости гидроцилиндров 1,2 и 4 подключены к выходам золотников 7, 8, при этом одноименные полости обоих гидроцилиндров 1 и 2 поворота плеча 3, например штоковые, сообщены гидролиниями 9 и 10 с соответствующей полостью гидроцилиндра 4 поворота предплечья 5 через дополнительный золотник 11. Причем площади сечений одноименных полостей всех гидроцилиндров равны между собой, т.е. для привода плеча и предплечья могут быть установлены одинаковые гидроцилиндры: два для поворота плеча и один для поворота предплечья. В этом случае, полные углы поворота предплечья α2 и плеча α1 так же будут равны между собой.
Точка крепления штока гидроцилиндра 4 на предплечье 5 может быть расположена на радиусе r2, определенном по формуле:
r2 =  где S2 - ход гидроцилиндра поворота предплечья, а точка крепления его гильзы на плече 3 на расстоянии, равном радиусу r1 - точки крепления штоков гидроцилиндров на плече. Величина r1 определяется графически или из известного соотношения:
где S2 - ход гидроцилиндра поворота предплечья, а точка крепления его гильзы на плече 3 на расстоянии, равном радиусу r1 - точки крепления штоков гидроцилиндров на плече. Величина r1 определяется графически или из известного соотношения:
r12+r22-2r1.r2.cos(ϕmin+ α2)=(l+2S2)2, где ϕmin - минимальный угол между плечом и предплечьем;
l - конструктивный размер, зависящий от конструкции гидроцилиндра и диаметра поршня.
Гильзы гидроцилиндров 1 и 2 в этом случае закрепляются на стойке 12 на радиусе r2. Обрабатываемый груз обозначен позицией 13, траектория перемещения рабочего органа в пределах полного угла α2 поворота предплечья обозначена позицией 14. Позициями 15-20 обозначены выходы золотников 7,8 и 11.
Система управления для манипулятора, реализующего способ, работает следующим образом.
Для перемещения рабочего органа 6 из начальной точки А по траектории 14 в точку В переводят дополнительный золотник 11 в правую по чертежу сторону. В этом случае рабочая жидкость от источника питания через выход 15 подается в поршневую полость гидроцилиндра 4, которая одновременно с поворотом предплечья 5, вытесняется его поршнем из штоковой полости по гидролиниям 9 и 10 в штоковые полости гидроцилиндров 1 и 2, а из их поршневых полостей через выход 16 золотника 11 сливается в бак. Из-за того, что суммарная площадь F1 штоковых полостей гидроцилиндров 1 и 2 в два раза больше площади F2 штоковой полости гидроцилиндра 4, угол α2 поворота предплечья 5 будет в два раза больше угла α1 поворота плеча 3. Это обеспечивает перемещение рабочего органа в пространстве по траектории 14, близкой к прямолинейной.
После прихода рабочего органа 6 в требуемую точку возвращают дополнительный золотник 11 в исходную позицию. Далее перемещают золотник 7 в правую по чертежу сторону. Рабочая жидкость от источника питания через выход 18 подается в штоковые полости гидроцилиндров 1 и 2, а через выход 17 сливается из поршневых полостей в бак. В этом случае плечо 3 опускает рабочий орган 6 к грузу 13. После этого возвращают золотник 7 в исходную позицию, производят захват груза и вновь перемещают золотник 7 теперь уже в левую по чертежу сторону. Рабочая жидкость через выход 17 подается в поршневую полость гидроцилиндров 1 и 2, а через выход 18 сливается в бак, поднимая захваченный груз на высоту для перемещения его в зону разгрузки - точка А. Далее с помощью дополнительного золотника 11 производят перемещение груза аналогично описанному, которое происходит в обратной последовательности.
Опускание и подъем рабочего органа 6 к грузу 13 можно осуществить и с помощью золотника 8. В этом случае опускание и подъем рабочего органа осуществляется с помощью предплечья 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРАВЛИЧЕСКИЙ МАНИПУЛЯТОР | 1989 |
|
RU2014212C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ РАБОЧЕГО ОРГАНА ГРУЗОПОДЪЕМНОГО УСТРОЙСТВА | 1992 |
|
RU2008199C1 |
| ГИДРОПРИВОД УПРАВЛЕНИЯ РАБОЧИМИ ОРГАНАМИ МАНИПУЛЯТОРА | 1992 |
|
RU2039172C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ МАНИПУЛЯТОРОМ | 2003 |
|
RU2240226C1 |
| ПОГРУЗОЧНЫЙ МАНИПУЛЯТОР | 1992 |
|
RU2038284C1 |
| Гидропривод лесозаготовительных машин манипуляторного типа | 1991 |
|
SU1805226A1 |
| ГИДРАВЛИЧЕСКИЙ ПРИВОД | 1993 |
|
RU2061914C1 |
| Горнопроходческая машина | 1980 |
|
SU968381A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ | 1994 |
|
RU2113396C1 |
| ФРОНТАЛЬНЫЙ ПОГРУЗЧИК С ЭНЕРГОСБЕРЕГАЮЩИМ ГИДРОПРИВОДОМ ПОГРУЗОЧНОГО ОБОРУДОВАНИЯ | 2005 |
|
RU2306389C2 |

Использование: в области машиностроения для систем управления гидравлическими манипуляторами. Сущность изобретения: процесс перемещения рабочего органа в пространстве за счет совместного регулирования угловыми перемещениями плеча и предплечья осуществляют путем подачи рабочей жидкости из полости гидроцилиндров поворота плеча 3 в одноименную полость гидроцилиндра 4 поворота предплечья 5 или наоборот при условии, когда угол α2 поворота предплечья в два раза больше угла α1 поворота плеча, а суммарная площадь сечения одноименных полостей обоих гидроцилиндров поворота плеча тоже в два раза больше площади сечения одноименных полостей гидроцилиндра 4. 2 с.п. ф-лы, 2 ил.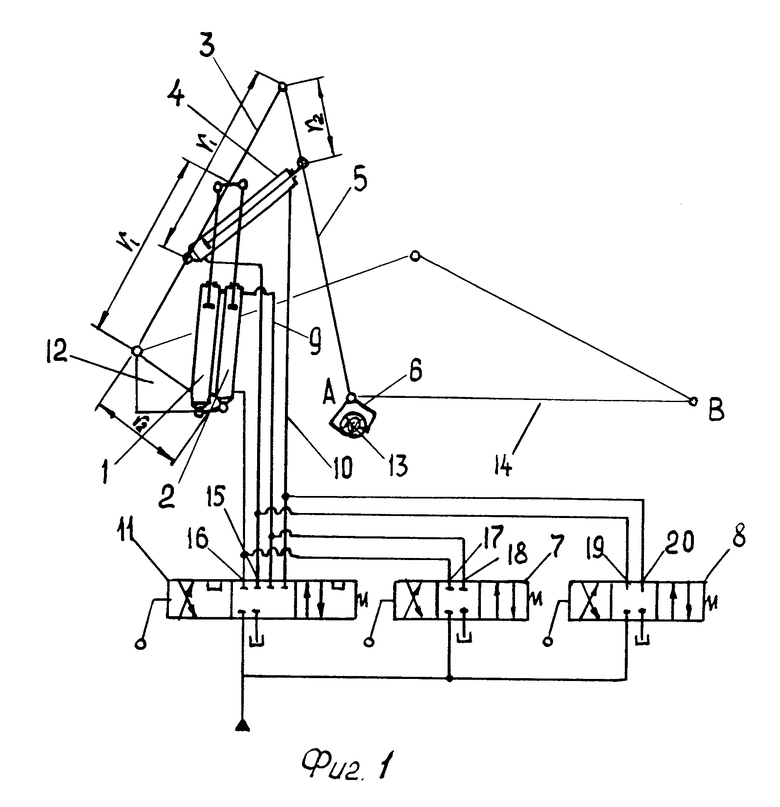
СПОСОБ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ МАНИПУЛЯТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ.

| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Жавнер В.Л | |||
| и др | |||
| Погрузочные манипуляторы | |||
| Л.: Машиностроение, 1975, с.27. | |||
