Изобретение относится к измерительной технике и может быть использовано в системах инерциальной навигации.
Известен маятниковый акселерометр, в котором положение маятника отслеживается системой фотоэлектронного слежения [1].
Недостатком аналога является влияние на результаты измерений положения маятника, а значит и величины ускорения, амплитудных факторов (измерения яркости источника света, старение фотоприемника, разъюстировка устройства и т.п.).
Известен маятниковый акселерометр с дисковым металлическим маятником и демпфирующим устройством. Угол поворота маятника измеряется с помощью оптического устройства, содержащего закрепленный на маятнике кодовый диск с радиальными сквозными прорезями, источник света и три фотоприемниика, оптически согласованные через кодовый диск [2].
Выходной сигнал акселерометра носит здесь частотный характер, поэтому данный акселерометр свободен от недостатка аналога.
Однако аналогу [2] присущи недостатки, связанные с погрешностью дискретизации отклонения маятника, особенно значительной при малых значениях отклонения маятника под действием ускорения. Это обусловлено тем, что количество прорезей кодового диска на определенном угле отклонения маятника - конечно.
Известен маятниковый акселерометр, содержащий корпус и закрепленный внутри корпуса маятник, а также два оптических датчика величины смещения маятника от положения равновесия, ориентированных в двух ортогональных направлениях, и выполненных в виде попарно оптически согласованных двух пар источников света и фотоприемников, подключенных выходами к входам усилителей, выходы которых соединены с микропроцессором, подключенным входом к регистратору [3].
Данный акселерометр [3] принят за прототип.
Достоинством прототипа по сравнению с аналогами [1, 2] является возможность измерения величины ускорения по двум координатам х, у.
Недостатком прототипа является влияние на результаты измерений ускорения амплитудных факторов, как в аналоге [1].
Техническим результатом, получаемым от внедрения изобретения, является устранение недостатка прототипа за счет измерения не амплитуды, а фазы оптического сигнала.
Данный технический результат получают за счет того, что в известном маятниковом акселерометре, содержащем корпус и закрепленный внутри корпуса маятник, а также два оптических датчика величины смещения маятника от положения равновесия, ориентированных в двух ортогональных направлениях, и выполненных в виде попарно оптически согласованных двух пар источников света и фотоприемников, подключенных выходами к входам усилителей, выходы которых соединены с микропроцессором, подключенным выходами к регистратору, на маятнике закреплены в ортогональной системе координат две пары волоконных катушек, попарно оптически связанных в два интерферометра с источниками света и фотоприемниками, при этом источники света выполнены когерентными, корпус - герметичным и заполненным рабочей жидкостью, а регистратор - в виде частотомера.
Акселерометр может также содержать два датчика знака (направления) отклонения маятника в прямоугольной системе координат, подключенными выходами к микропроцессору.
Акселерометр может содержать фазосдвигающее устройство, установленное в одной из волоконных катушек, при этом выходы усилителей соединяют с микропроцессором через аналого-цифровые преобразователи (АЦП).
В качестве рабочей жидкости используют дистиллированную воду, при этом корпус акселерометра выполняют из нержавеющей стали.
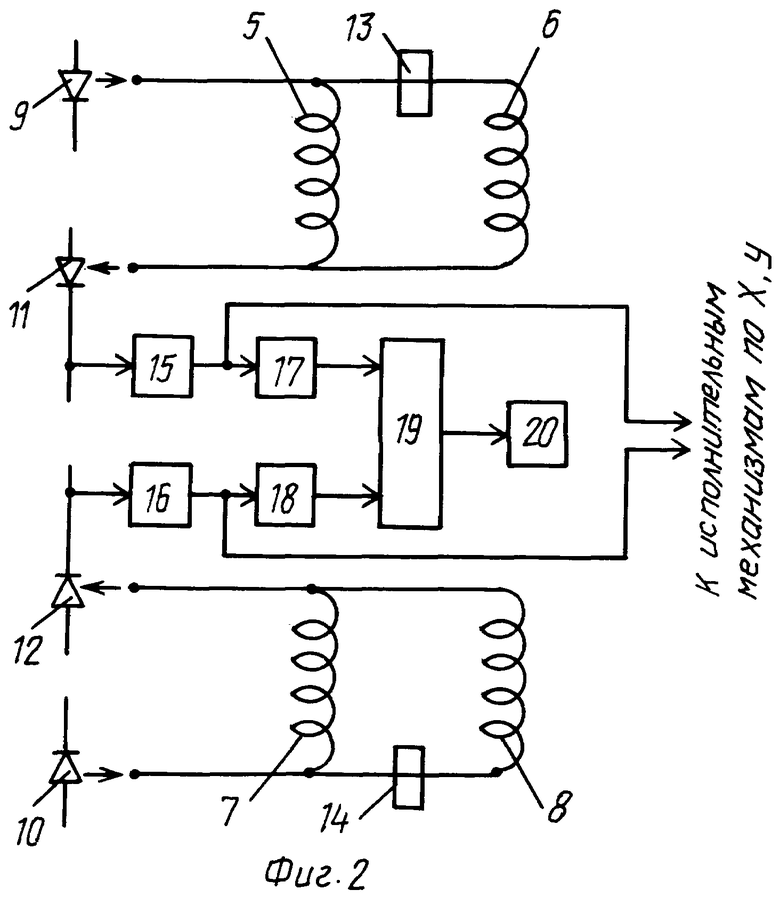
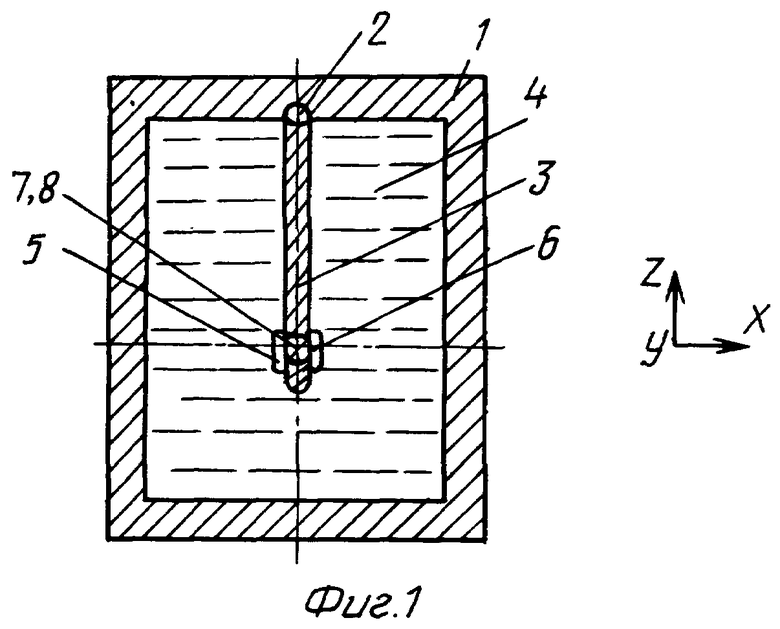
Изобретение поясняется чертежом, на фиг.1 которого представлена конструктивная схема акселерометра, а на фиг.2 - его оптико-электронная схема.
Маятниковый акселерометр содержит корпус 1 (фиг.1) и закрепленный внутри корпуса на шарнире 2 маятник 3. Корпус 1 выполнен из нержавеющей стали герметичным. Корпус 1 заполнен дистиллированной водой 4.
Имеется два оптических датчика смещения маятника от положения равновесия по направлению х, у под действием ускорения.
Оптические датчики выполнены в виде двух пар волоконных катушек 5, 6 и 7, 8 из оптического волокна, расположенных на маятнике 3 с различных его сторон по прямоугольной системе координат х, у. (На фиг.1 волоконные катушки 7 и 8 слились на чертеже).
Имеются также два когерентных источника света 9, 10 (фиг.2), выполненные в виде светодиодов, и два фотоприемника 11, 12, выполненных в виде фотодиодов.
Источники 9, 10 света и фотоприемники 11, 12 оптически связаны через волоконные катушки 5, 6 и 7, 8 в два интерферометра.
Волоконные катушки 6, 8 интерферометров могут содержать фазосдвигающие устройства 13, 14.
Выходы фотоприемников 11, 12 подключены через последовательно соединенные усилители 15, 16 и АЦП 17, 18 к двум входам микропроцессора 19, выход которого подключен к регистратору 20, выполненному в виде частотомера.
Когда реализуется основной пункт формулы изобретения для упрощения программы работы микропроцессора 19 целесообразно введение двух датчиков знака отклонения маятника 3 по координатам х, у, выполненных по любой известной схеме. Например, в виде цилиндрической капсулы с двумя парами электрических контактов у оснований капсулы, замыкаемых электропроводным шариком, расположенным внутри капсулы при наклоне последней. Капсулы закрепляются на конце маятника 3 (не показаны).
Провода к капсулам и оптические волокна к источникам света 9, 10 и фотоприемникам 11, 12 проходят внутри маятника 3 и выходят наружу корпуса 1. (На фиг.1 данная оптическая и электрическая связь не показаны).
Выходы усилителей 15, 16 могут быть соединены с исполнительными механизмами изделия, на котором используется акселерометр (например, ракете, торпеде, подвижном плавсредстве и т.п.) для корректировки величины скорости и направления его движения.
Маятниковый акселерометр работает в двух режимах: в режиме больших отклонений маятника (первые два пункта формулы изобретения) и малых (пункты 1, 2, 3 формулы изобретения).
В первом режиме работы в акселерометре отсутствуют фазосдвигающее устройство 13, 14 и АЦП 17, 18. А выходные сигналы фотоприемников 11, 12 выглядят в виде интерференционных пиков.
Во втором режиме интерферометры работают в пределах четверти интерференционной полосы на квазилинейном участке интерференционной полосы. Предварительно с помощью фазосдвигающих устройств 13, 14 начальную разность фаз интерферирующих лучей устанавливают равной 90°. Аналоговый выходной сигнал с помощью АЦП 17, 18 преобразуют в цифровой для нормальной работы микропроцессора 19.
Иногда целесообразно использовать две пары рассматриваемых интерферометров: по каждой из координат х, у использовать интерферометр для измерения малых и больших отклонений маятника 3. При этом программа работы микропроцессора 19 усложняется.
Акселерометр работает следующим образом.
Предварительно отградуированный акселерометр закрепляют на изделии. Начальное положение маятника 3 при этом может быть вертикальным или наклонным.
При воздействии на изделие ускорения маятник 3, а с ним и волоконные катушки 5, 6 и 7, 8 придут в движение. При этом динамическое давление на одну из катушек (носовую) будет больше, чем на другую (кормовую). Например, при движении маятника 3 в направлении х давление на волоконную катушку 6 будет больше, чем на волоконную катушку 5 (фиг.1).
В первом режиме работы интерферометров на их выходах появится частотный выходной сигнал. Частота сигнала несет информацию о скорости изменения измеряемой величины, а количество пиков - о ее величине. Информация поступает на микропроцессор 19 и частотомер 20.
Во втором режиме - характер выходного сигнала - аналоговый. После преобразования в АЦП 17, 18 он также поступает на микропроцессор 19 и регистратор 20.
Для осуществления инерциальной автоматической навигации изделия (ракета, торпеда) сигнал с выхода усилителей 15, 16 или АЦП 17, 18 подается на соответствующие координатные исполнительные механизмы, снабженные соответствующими электронными блоками для преобразования поступающих сигналов (не показаны).
При этом все волоконные катушки 5, 6 и 7, 8 интерферометров находятся в одинаковых условиях по температуре, глубине и т.п., поэтому амплитудные факторы не будут влиять на результаты измерений. Чем достигается поставленный технический результат.
Источники информации
1. Заявка Японии №62 - 157574, кл. G 01 P 15/02, G 01 P 15/11, 1987.
2. Заявка ФРГ №4124031, кл. G 01 P 15/03, 1993.
3. Заявка Японии №62 - 233769, кл. G 01 P 15/11, 1987 - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИЗМЕРИТЕЛЬ ПАРАМЕТРОВ МОРСКИХ ВОЛН | 2002 |
|
RU2231033C2 |
| ОПТОЭЛЕКТРОННЫЙ КРЕНОМЕТР | 2003 |
|
RU2244259C1 |
| ЖИДКОСТНОЙ АКСЕЛЕРОМЕТР | 2003 |
|
RU2236015C1 |
| ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ ПРИБОР | 2005 |
|
RU2300079C1 |
| ПОРТАТИВНАЯ ГИДРОАКУСТИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2002 |
|
RU2233458C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК СКОРОСТНОГО НАПОРА ПОТОКА ЖИДКОСТИ | 1993 |
|
RU2060505C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ИЗМЕРИТЕЛЬ ВОЛНОВОГО ДАВЛЕНИЯ У ПОВЕРХНОСТИ МОРЯ | 1996 |
|
RU2112943C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ИНТЕНСИВНОСТИ МОРСКОГО ВОЛНЕНИЯ | 2002 |
|
RU2231025C2 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ГИДРОФИЗИЧЕСКИХ ПАРАМЕТРОВ МОРСКОЙ СРЕДЫ | 1993 |
|
RU2047279C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ШУМОПЕЛЕНГАТОР | 1995 |
|
RU2105992C1 |
Изобретение относится к измерительной технике и может быть использовано в системах инерциальной навигации. Существо изобретения заключается в том, что в герметичном корпусе, заполненном рабочей жидкостью, закрепляется маятник, смещаемый от положения равновесия воздействующим ускорением. Положение маятника отслеживается по двум координатам двумя оптическими датчиками, выполненными в виде двух пар волоконных катушек, закрепленных с четырех сторон маятника попарно напротив друг друга. Волоконные катушки попарно оптически согласованы с двумя источниками когерентного света и двумя фотоприемниками в два интерферометра. Воздействие ускорения приводит к фазовому изменению интерферирующих лучей интерферометров, которое измеряется с помощью электронной системы. Техническим результатом является повышение точности измерений за счет измерения не амплитуды, а фазы оптического сигнала. 2 з.п. ф-лы, 2 ил.
| JP 62233769 А, 14.10.1987 | |||
| ВОЛОКОННО-ОПТИЧЕСКИЙ ДАТЧИК СКОРОСТНОГО НАПОРА ПОТОКА ЖИДКОСТИ | 1993 |
|
RU2060505C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ ПОДВОДНЫХ ТЕЧЕНИЙ | 1994 |
|
RU2105985C1 |
| ЕР 0419173 А1, 27.03.1991 | |||
| JP 62157574 А, 13.07.1987. | |||

