Шумопеленгатор для поиска скоплений крабов относится к области гидроакустической техники и может быть использован для поиска промысловых скоплений крабов по их шумовому полю, а также для обнаружения немаркированных (утерянных и браконьерских) порядков крабовых ловушек.
Известны устройства для ведения разведки и оценки промысловых запасов крабов в виде контрольных ловушек и донных тралов [1], однако они не позволяют отображать промысловую обстановку в реальном масштабе времени, а также их использование сопряжено с причинением экологического вреда популяции крабов.
Наиболее близким к предлагаемому изобретению по технической сущности является шумопеленгатор “Чайка” [2], предназначенный для обнаружения биологической компоненты шумов моря и определения направления на шумоизлучающие объекты, а также для прослушивания и опознавания источников биологических шумов и содержащий следующие последовательно соединенные блоки:
- приемную антенну, состоящую из пяти разнесенных в пространстве гидрофонов;
- блок предварительной обработки сигналов;
- блок пространственно-временной обработки сигналов;
- блок отображения информации.
Шумопеленгатор “Чайка” достаточно эффективен как прибор для исследования биологической компоненты шумов моря, однако использование его для поиска промысловых скоплений крабов по излучаемым ими шумам практически не приемлемо, ибо он не позволяет в реальном масштабе времени определять их местоположение. Для определения места скопления крабов необходимо осуществлять сложное маневрирование носителем прибора с целью решения триангуляционной задачи, что связано с большими потерями времени при низкой точности и надежности решения поставленной задачи. При использовании шумопеленгатора “Чайка” идентификация обнаруженных объектов производилась на слух по субъективным признакам, объективные признаки не использовались.
Целью предлагаемого изобретения является повышение эффективности поиска промысловых скоплений крабов путем определения местоположения объекта поиска в реальном масштабе времени и идентификации обнаруженного объекта как по субъективным, так и по объективным признакам.
Указанная цель достигается тем, что шумопеленгатор для поиска скоплений крабов, содержащий последовательно соединенные приемную антенну, блок предварительной обработки сигналов, блок пространственно-временной обработки сигналов и блок отображения информации, снабжен блоком идентификации, подключенным между блоком пространственно-временной обработки сигналов и блоком отображения информации, к блоку идентификации подключены блок сопряжения с электронной картой, блок сопряжения с приемником системы навигации, а также блок базы данных эталонных портретов и блок спектрального анализа, связанный с блоком предварительной обработки сигналов.
Дополнение шумопеленгатора блоком идентификации с подключенными к нему блоками сопряжения с электронной картой, сопряжения с приемником системы навигации, спектрального анализа и блоком базы данных эталонных спектральных портретов позволяет:
- определять в реальном масштабе времени координаты обнаруженных шумящих объектов в зоне обзора под килем судна, включая крабовые ловушки, заполненные крабом;
- выполнять идентификацию обнаруженных крабовых скоплений по их шумовому сигналу в автоматическом режиме с нанесением их позиций на электронную карту в реальном масштабе времени;
- выполнять субъективную идентификацию обнаруженных объектов по результатам анализа их шумового сигнала в ручном режиме с последующим нанесением позиций опознанных крабовых скоплений на электронную карту.
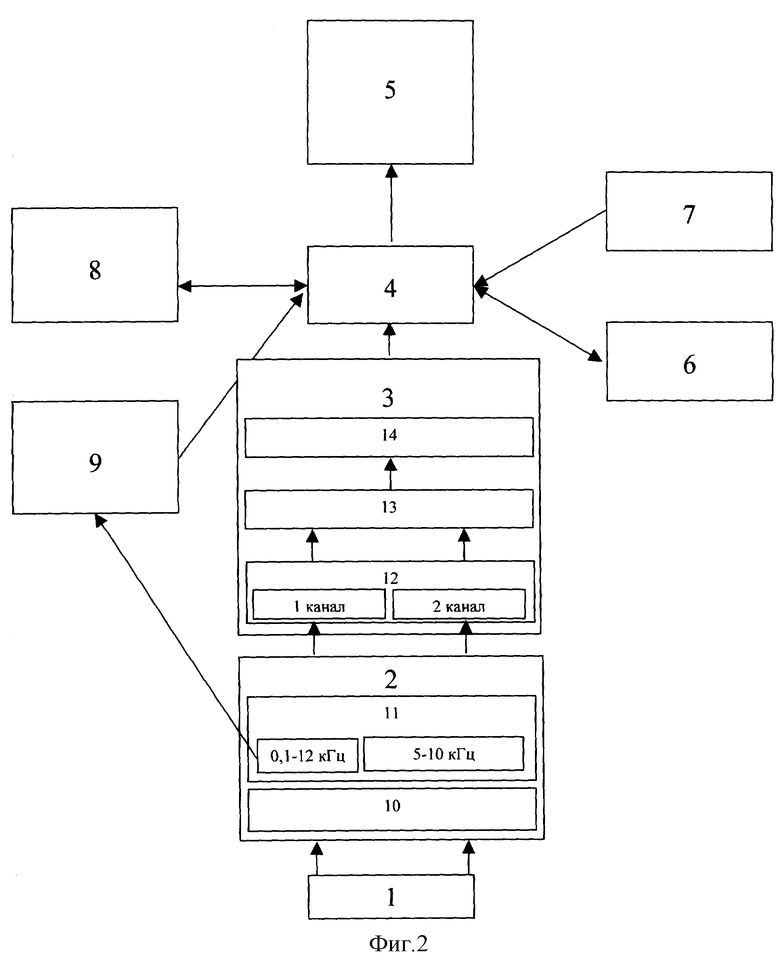
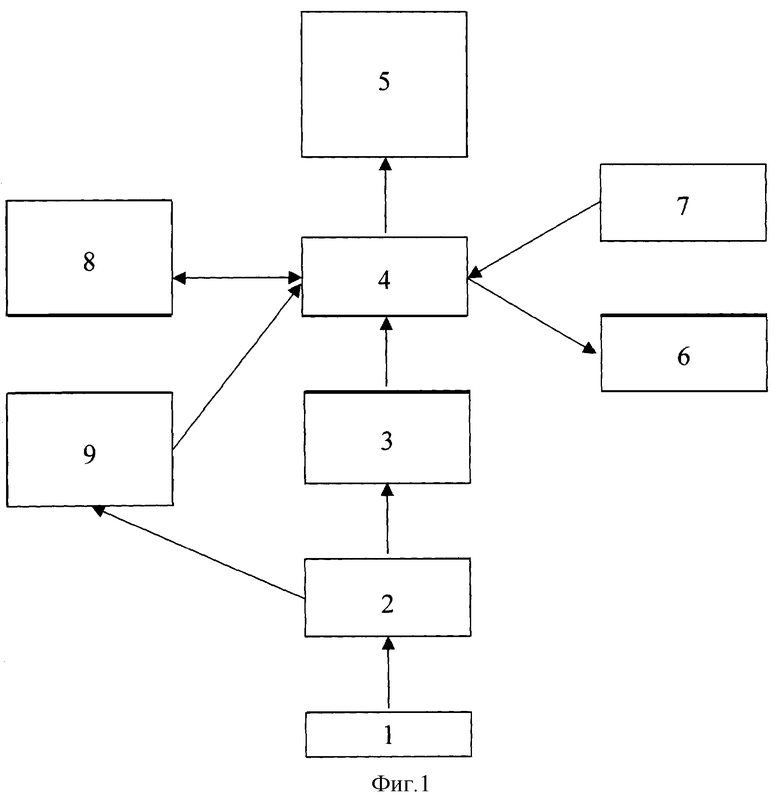
На фиг.1 представлена блок-схема шумопеленгатора, на фиг.2 представлена блок-схема шумопеленгатора в конкретном исполнении.
Шумопеленгатор состоит из последовательно соединенных приемной антенны 1, блока предварительной обработки сигналов 2, блока пространственно-временной обработки сигналов 3, блока идентификации 4, блока отображения информации 5.
К блоку идентификации 4 подключены блок сопряжения с электронной картой 6, блок сопряжения с приемником системы навигации 7, блок базы данных эталонных портретов 8 и блок спектрального анализа 9, связанный с блоком предварительной обработки сигналов 2.
Рассмотрим работу шумопеленгатора на примере конкретного исполнения.
Шумопеленгатор имеет приемную антенну 1. Габариты приемной антенны 100х100 см. Приемная антенна 1 состоит из 14 линейных дискретных антенн, ориентированных вдоль диаметральной плоскости судна. Каждая из антенн состоит из 14 гидрофонов и формирует диаграмму направленности, ориентированную по нормали в сторону дна. Рассматривая далее каждую из линейных дискретных антенн как чувствительный элемент, получаем линейную приемную антенну из 14 элементов, ориентированную перпендикулярно диаметральной плоскости судна.
Сигналы с каждого элемента антенны поступают в блок предварительной обработки сигналов 2, где после предварительного усиления в предварительном усилителе 10 идут на полосовой фильтр 11. Полосовой фильтр 11 обеспечивает фильтрацию сигнала:
- в широкой полосе частот 0,1-12 кГц - используется для спектральной обработки сигнала в режиме “ИДЕНТИФИКАЦИЯ”;
- в рабочей полосе частот 5-10 кГц - используется для обнаружения сигнала в режиме “ПОИСК”.
После полосового фильтра 11 из блока предварительной обработки сигналов 2 широкополосный сигнал поступает в блок спектрального анализа 9, где производится выделение спектра обнаруженного сигнала, а также транзитом передается в блок идентификации 4. Сигналы рабочей полосы частот поступают в блок пространственно-временной обработки сигналов 3 на двухканальный блок формирования веера характеристик направленности 12, где формируются два веера аддитивных характеристик направленности. Сигналы с выхода каналов блока формирования веера характеристик направленности 12 поступают в перемножитель 13. Полученный таким образом сигнал поступает в осреднитель 14, где производится его осреднение по времени.
Мультипликативная обработка в блоке 13 дает возможность сформировать более острые характеристики направленности. Использование узких характеристик направленности снижает влияние посторонних акустически активных объектов, повышает достоверность получаемой информации.
Веер характеристик направленности ориентируется в плоскости мидель-шпангоута в секторе ±45° от нормали. Использование веера узких характеристик направленности дает возможность при высокой помехоустойчивости обеспечить значительную ширину обследуемой полосы (160 м на глубине 60 м). Производительность поиска достигается за счет производства измерений на ходу судна. Поисковая скорость 6 узлов обеспечивает производительность поиска 1,7 км2/ч.
С выхода осреднителя 14 осредненный сигнал поступает в блок идентификации 4, который предназначен для решения задач обнаружения и идентификации, управления режимами работы шумопеленгатора, а также синхронизации работы его блоков с периферийными устройствами.
В шумопеленгаторе предусмотрено два режима - “ПОИСК” и “ИДЕНТИФИКАЦИЯ”.
В режиме “ПОИСК” сигнал рабочей полосы частот непрерывно поступает с блока идентификации 4, где производится обнаружение шумящих источников в зоне обзора, на блок отображения информации 5 (окно реального времени), который обеспечивает отображение акустической активности толщи воды под килем, включая дно в зоне обзора приемной антенны, на цветном мониторе в реальном масштабе времени. Для отображения интенсивности источника звука используется уже привычная по работе с активными промысловыми эхолотами цветовая гамма (от синего к красному). Использование цветного дисплея обеспечивает наглядность в процессе обследования района поиска и не требует специальной подготовки оператора для оценки промысловой обстановки. Режим “ИДЕНТИФИКАЦИЯ” имеет два подрежима:
- АВТОМАТИЧЕСКАЯ ИДЕНТИФИКАЦИЯ;
- РУЧНАЯ ИДЕНТИФИКАЦИЯ.
В подрежиме “АВТОМАТИЧЕСКАЯ ИДЕНТИФИКАЦИЯ” спектр обнаруженного сигнала в широкой полосе частот поступает с блока спектрального анализа 9 в блок идентификации 4, где производится сравнение спектра данного сигнала со спектрами эталонных портретов крабов (крабовых скоплений), поступающих из блока базы данных эталонных портретов 8.
В том случае, если принятый сигнал опознан как сигнал крабов, с блока идентификации 4 на блок отображения информации 5 и через блок сопряжения 6 на электронную карту (при отсутствии электронной карты, ее роль может выполнять любое другое устройство документирования координат) поступает сигнал обнаружения. На электронной карте и в окне реального времени блока отображения информации 5 координаты обнаруженных крабовых скоплений обозначаются маркером.
В подрежиме “РУЧНАЯ ИДЕНТИФИКАЦИЯ” с блока идентификации 4 временная реализация сигнала поступает на блок отображения информации 5 (окно идентификации), который используется для получения дополнительной классификационной информации.
Для реализации данного режима в блоке идентификации 4 предусмотрено выполнение дополнительных операций:
- маркировка записанных временных реализаций сигнала текущими координатами судна, поступающими от приемника системы навигации через блок сопряжения 7;
- просмотр выполненных записей в произвольном масштабе времени;
- субъективная идентификация принятых акустических сигналов путем анализа классификационных признаков, сравнения с сигналами из блока базы данных эталонных портретов 8.
При обнаружении сигналов, идентифицированных как сигналы крабов (крабовых скоплений) и отсутствующих в базе данных, они могут быть направлены оператором из блока идентификации 4 в блок базы данных эталонных портретов 8.
При идентификации сигналов крабов и крабовых скоплений в ручном режиме с блока идентификации 4 сигнал обнаружения крабов оператором передается на блок сопряжения с электронной картой 6. На электронной карте координаты идентифицированного сигнала обозначаются маркером.
Сопряжение блока идентификации 4 с приемником системы навигации и системой электронных карт осуществляется через блок сопряжения с электронной картой 6 и блок сопряжения с приемником системы навигации 7. Текущие координаты места судна в автоматическом режиме поступают в блок идентификации 4 для маркировки записываемого в оперативную память акустического сигнала. Поскольку шумопеленгатор прослушивает однозначно определенную полосу под килем судна, то задача определения координат обнаруженных скоплений краба обеспечивается путем их привязки к координатам судна (с точностью порядка 20 м).
Приемная антенна 1 может закрепляться на выносной штанге в районе форштевня или вдоль борта. Закрепление антенны на выносной штанге обеспечивает возможность установки шумопеленгатора на любых проектах судов без серьезных конструктивных их доработок. Возможна и стационарная подкильная установка приемной антенны 1.
Таким образом, предлагаемый шумопеленгатор позволяет:
- получать данные о распределении краба в районе поиска в реальном масштабе времени (изменениями координат судна за время автоматической идентификации сигнала можно пренебречь ввиду их малости);
- значительно повысить производительность поиска промысловых скоплений крабов по сравнению с существующими устройствами;
- обеспечить эффективный поиск немаркированных (утерянных и браконьерских) крабовых порядков по шумовому полю, создаваемому крабами, находящимися в ловушках (как целые порядки, так и отдельные ловушки), что для других средств поиска практически недоступно;
- исключить физическое воздействие на объект промысла в процессе обнаружения и при оценке его запасов, что исключает гибель самцов непромысловых размеров и самок краба, имеющую место при ведении промысловой разведки традиционными устройствами.
В результате использования предлагаемого шумопеленгатора существенно снижаются трудозатраты, финансовые затраты и повышается эффективность крабового промысла без нанесения экологического вреда популяции крабов.
Источники информации
1. Левин В.С. Камчатский краб Paralithodes camtshaticus. Биология, промысел, воспроизводство. - СПб.: Ижица, 2001. - 198с.: 40 ил.
2. Шишкова Е.В. Рыбошумопеленгатор Чайка // Рыбное хозяйство, - 1973. - № 12. - С.34-37 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОИСКА НЕМАРКИРОВАННЫХ (БРАКОНЬЕРСКИХ) ОРУДИЙ ЛОВА, НАХОДЯЩИХСЯ НА ГРУНТЕ И В ПРИДОННОМ СЛОЕ ОСАДКОВ | 2003 |
|
RU2249233C1 |
| Информационно-аналитическая система мониторинга деятельности судов рыбопромыслового флота, контроля улова, переработки и перемещения водных биологических ресурсов и производимой из них продукции | 2021 |
|
RU2785222C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| Комплекс навигации и управления кораблем | 2022 |
|
RU2786251C1 |
| СПОСОБ МОБИЛЬНОГО ПОИСКА МЕСТОРОЖДЕНИЙ УГЛЕВОДОРОДОВ И ДОННЫХ ОБЪЕКТОВ, ОБНАРУЖЕНИЯ ПРИЗНАКОВ ЗАРОЖДЕНИЯ ОПАСНЫХ ЯВЛЕНИЙ НА МОРСКОМ ШЕЛЬФЕ | 2015 |
|
RU2601773C2 |
| СПОСОБ ПОИСКА МЕСТОРОЖДЕНИЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ ПО СОБСТВЕННОМУ ИЗЛУЧЕНИЮ, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И МИКРОЛЕПТОННЫЙ ИНДИКАТОР | 1997 |
|
RU2113000C1 |
| СПОСОБ ПОИСКА МЕСТОРОЖДЕНИЙ УГЛЕВОДОРОДОВ НА МОРСКОМ ШЕЛЬФЕ | 2012 |
|
RU2503036C1 |
| СПОСОБ ОЦЕНКИ КОНКУРЕНТОСПОСОБНОСТИ ГИДРОАКУСТИЧЕСКОЙ РЫБОПОИСКОВОЙ АППАРАТУРЫ И ИНФОРМАЦИОННО-АНАЛИТИЧЕСКАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2139554C1 |
| СПОСОБ МАСКИРОВКИ ПОДВОДНОГО ШУМА РЫБОПРОМЫСЛОВОГО СУДНА И УСТРОЙСТВО МАСКИРОВКИ | 2001 |
|
RU2215305C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ КРУГОВОГО ОБЗОРА | 2012 |
|
RU2522982C2 |
Изобретение относится к области гидроакустической техники и может быть использован для поиска промысловых скоплений крабов по их шумовому полю, а также для обнаружения немаркированных (утерянных и браконьерских) порядков крабовых ловушек. Технический результат: повышение эффективности поиска. Сущность: шумопеленгатор содержит последовательно соединенные приемную антенну, блок предварительной обработки сигналов, блок пространственно-временной обработки сигналов, блок идентификации и блок отображения информации. К блоку идентификации подключены блок сопряжения с электронной картой, блок сопряжения с приемником системы навигации, блок базы данных эталонных портретов и блок спектрального анализа, связанный с блоком предварительной обработки сигналов. 2 ил.
Шумопеленгатор для поиска скоплений крабов, содержащий последовательно соединенные приемную антенну, блок предварительной обработки сигналов, блок пространственно-временной обработки сигналов и блок отображения информации, отличающийся тем, что он снабжен блоком идентификации, подключенным между блоком пространственно-временной обработки сигналов и блоком отображения информации, к блоку идентификации подключены блок сопряжения с электронной картой, блок сопряжения с приемником системы навигации, а также блок базы данных эталонных портретов и блок спектрального анализа, связанный с блоком предварительной обработки сигналов.
| Шишкова Е.В | |||
| Рыбошумопеленгатор "Чайка" Ж | |||
| "Рыбное хозяйство", 1973, №12, с.34-37 | |||
| СПОСОБ ПЕЛЕНГАЦИИ ГИДРОБИОНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2064683C1 |
| СПОСОБ ПЕЛЕНГАЦИИ ГИДРОБИОНТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1996 |
|
RU2093856C1 |
| US 4879697 A, 07.11.1989 | |||
| US 3882444 А, 06.05.1975. | |||

