Изобретение относится к области промысловой гидроакустики и может быть использовано в рыбной промышленности для поиска немаркированных (браконьерских) орудий лова, находящихся на грунте и в придонном слое осадков.
Задача, которая решается изобретением, заключается в эффективном поиске, распознавании и определении пространственных координат немаркированных (браконьерских) орудий лова, находящихся на грунте и в придонном слое осадков, в интересах обеспечения рационального использования морских биологических ресурсов.
Способ реализуется следующим образом.
Судно, производящее поиск немаркированного орудия лова, буксирует при помощи кабель-троса подводный аппарат. На судне находится спутниковая навигационная система, позволяющая с высокой точностью определять координаты судна в пространстве, а также электронно-вычислительная машина (ЭВМ), обеспечивающая управление работой всех трактов, находящихся на судне и в буксируемом подводном аппарате (БПА). Кроме того, ЭВМ решает, в конечном итоге, задачи эффективного поиска, обнаружения, распознавания и определения пространственных координат немаркированных орудий лова, находящихся на грунте и в придонном слое осадков. При этом в соединенных между собой при помощи специального фала ловушках находятся морские биологические объекты (МБО), издающие в процессе своей жизнедеятельности широкополосные сигналы Ω б.
В тракте параметрического излучения широкополосных сигналов при помощи последовательно электрически соединенных блока формирования сигналов накачки на частотах ω 3 и ω 4, второго усилителя мощности и второго излучателя высокочастотных (ВЧ) сигналов накачки осуществляется формирование, усиление до необходимого уровня и излучение в водную среду ВЧ сигнала накачки на частотах ω 3 и ω 4. В водной среде происходит генерация широкополосной волны разностной частоты Ω 2=ω 3-ω 4, с помощью которой лоцируется вся толща воды от поверхности до дна.
В тракте непрерывного излучения интенсивного ВЧ сигнала накачки с помощью последовательно электрически соединенных блока формирования сигналов на частоте накачки ω н1, третьего усилителя мощности и третьего излучателя ВЧ сигнала накачки осуществляется формирование, усиление до необходимого уровня и излучение в водную среду ВЧ сигнала накачки на частоте ω н1, близкой к субгармонике резонансной частоты пузырьков воздуха ω 0, находящихся в приповерхностном слое воды в районе расположения третьего излучателя ВЧ сигнала накачки. В водной среде происходит нелинейное взаимодействие рассеянной в обратном направлении ВЧ волны накачки ω ’н1 с отраженной от неоднородностей (рассеиватели звука, находящихся во всей толще воды) водной среды широкополосной волной Ω ’2. При этом образуется ВЧ волна на комбинационной частоте ω ’н1±Ω’2, которая принимается с помощью первого ВЧ приемника, расположенного в нижней части корпуса судна, тракта параметрического приема широкополосных сигналов. Далее ВЧ сигнал на комбинационной частоте ω ’н1±Ω’2 поступает на вход блока фильтров, где осуществляется подавление ВЧ помех. С выхода блока фильтров ВЧ сигнал на комбинационной частоте ω
При этом в тракте параметрического излучения относительно широкополосных сигналов с помощью последовательно электрически соединенных блока формирования ВЧ сигналов накачки на частотах ω 1 и ω 2, первого усилителя мощности и первого излучателя ВЧ сигналов накачки на частотах ω 1 и ω 2 осуществляется формирование, усиление до необходимого уровня и излучение ВЧ сигнала накачки на частотах ω 1 и ω 2, близких к резонансной частоте ω 0 пузырьков воздуха, находящихся в приповерхностном слое воды в районе расположения первого излучателя ВЧ сигналов накачки ω 1 и ω 2. В водной среде происходит генерация относительно широкополосной волны разностной частоты Ω 1=ω 1-ω 2, с помощью которой лоцируется на большой площади дно, в том числе и немаркированное орудие лова, находящееся на грунте и в придонном слое осадков под различным углом к курсу движения судна. В тракте параметрического излучения относительно узкополосных и менее интенсивных сигналов с помощью последовательно электрически соединенных блока формирования ВЧ сигналов накачки на частотах ω 5 и ω 6, четвертого усилителя мощности и четвертого излучателя ВЧ сигналов накачки на частотах ω 5 и ω 6 осуществляется формирование, усиление до необходимого уровня и излучение в водную среду ВЧ сигналов накачки на частотах ω 5 и ω 6. В водной среде происходит генерация волны относительно узкополосной разностной частоты Ω 3=ω 5-ω 6, лоцируется с ее помощью немаркированное орудие лова (на меньшей дальности, в узком телесном угле, на оптимальном курсе движения буксируемого подводного аппарата и т.д.), принимается отраженная волна разностной частоты Ω ’3 и более достоверно (в конечном случае) распознаются немаркированные орудия лова и более точно определяются их координаты.
В тракте непрерывного излучения менее интенсивного ВЧ сигнала накачки с помощью последовательно электрически соединенных блока формирования сигнала накачки на частоте ω н2, пятого усилителя мощности и пятого излучателя ВЧ сигнала накачки осуществляется формирование, усиление до необходимого уровня и излучение ВЧ сигнала накачки на частоте ω н2, близкой к резонансной частоте ω s рассеивателей звука, доминирующих на горизонте нахождения буксируемого подводного аппарата в районе расположения пятого излучателя ВЧ сигнала накачки.
В водной среде происходит нелинейное взаимодействие рассеянных в обратном направлении ВЧ волн накачки ω ’н1 и ω ’н2 с отраженными волнами на разностных частотах Ω ’1, Ω ’2 и Ω ’3, а также шумоизлучением Ω б МБО, при этом образуются ВЧ волны на комбинационных частотах ω ’н1±Ω’1, ω ’н1±Ω’2,ω’н1±Ω’3,ω’н1±Ω б, ω ’н2±Ω’1, ω ’н2±Ω’2, ω ’н2±Ω’3, ω ’н2±Ω б, которые принимаются соответственно с помощью первого ВЧ приемника тракта параметрического приема широкополосных сигналов и с помощью второго ВЧ приемника тракта высоконаправленного параметрического приема широкополосных сигналов. Далее ВЧ сигналы на комбинационных частотах ω ’н1±Ω’1, ω ’н1±Ω’3 и ω ’н1±Ω б поступают на входы соответствующих блоков фильтров, где осуществляется подавление ВЧ помех. С выхода блока фильтров ВЧ сигналы на комбинационных частотах ω ’н1±Ω’1, ω ’н1±Ω’3 и ω ’н1±Ω б поступают на входы соответствующих блоков обработки сигналов, в которых осуществляется выделение полезных широкополосных сигналов Ω ’1, Ω ’3 и Ω б из ВЧ сигналов на комбинационных частотах ω ’н1±Ω’1, ω ’н1±Ω’3 и ω ’н1±Ω б методом детектирования. С выходов блоков обработки сигналов широкополосные сигналы Ω ’1, Ω ’3 и Ω б поступают на вход ЭВМ. Одновременно с этим сигналы на ВЧ комбинационных частотах ω ’н2±Ω’1, ω ’н2±Ω’2, ω ’н2±Ω’3, ω ’н2±Ω б поступают с выхода второго ВЧ приемника на вход многоканального блока фильтров, где осуществляется подавление ВЧ помех по каждому каналу (каждой ВЧ комбинационной частоте). С выхода блока фильтров ВЧ сигналы на комбинационных частотах ω ’н2±Ω’1, ω ’н2±Ω’2, ω ’н2±Ω’3, ω ’н2±Ω б поступают на соответствующие входы многоканального блока обработки сигналов, в которых осуществляется выделение широкополосных сигналов Ω ’1, Ω ’2, Ω ’3 и Ω б из ВЧ сигналов на комбинационных частотах ω ’н2±Ω’1, ω ’н2±Ω’2, ω ’н2±Ω’3, ω ’н2±Ω б методом детектирования. С выхода многоканального блока обработки сигналов полезные широкополосные сигналы Ω ’1, Ω ’3 и Ω б поступают на вход ЭВМ.
Одновременно с этим в тракте линейного приема широкополосных сигналов с помощью последовательно электрически соединенных широкополосного приемника, расположенного в нижней части буксируемого подводного аппарата, многоканального блока фильтров и многоканального блока обработки широкополосных сигналов осуществляется прием, фильтрация и обработка отраженных сигналов на разностных частотах Ω ’1, Ω ’2 и Ω ’3, а также шумоизлучения Ω б МБО, находящихся в немаркированном орудии лова. В ЭВМ все полезные сигналы Ω ’1, Ω ’3 и Ω б сравнивают с эталонными сигналами Ω 1, Ω 3 и Ω б и принимают окончательное решение об обнаружении, идентификации и определении пространственных координат немаркированного (баконьерского) орудия лова, находящегося на грунте и в придонном слое осадков (9 ил).
Известен способ обнаружения морских объектов (в том числе биологических), заключающийся в формировании, усилении и излучении в водную среду гидроакустических сигналов; распространении гидроакустических сигналов, в том числе в сторону морского объекта; приеме и идентификации гидроакустических сигналов, прошедших через водную среду и отразившихся от морского объекта, а также принятии решения об его обнаружении и определении пространственных координат объекта [1].
К недостаткам данного способа относятся:
1. Сложность обнаружения морского объекта с незначительной отражательной способностью (например, разряженных скоплений рыбы, скоплений беспозвоночных, орудий лова и др.).
2. Невозможность обнаружения морского объекта (например, орудий лова) находящегося в придонном слое осадков.
3. Незначительная дальность, из-за низкого соотношения сигнал/помеха (С/П), особенно в условиях поверхностной и донной реверберации, на выходе приемной части устройства.
4. Низкая достоверность распознавания морского объекта.
Известен способ поиска и идентификации морских объектов (в том числе биологических) по издаваемым ими характерным шумам, заключающийся в формировании и излучении в водную среду гидроакустических сигналов биологического характера; распространении гидроакустических сигналов биологического характера в водной среде, в том числе и в сторону приемной части устройства; приеме и распознавании гидроакустических сигналов биологического характера, прошедших через водную среду, а также определении их пространственных координат и принятии решения об обнаружении морских объектов [2].
К недостаткам данного способа относятся:
1. Сложность обнаружения морского объекта с незначительным уровнем подводных шумов и сигналов (например, разряженных скоплений рыбы, скоплений беспозвоночных и др.).
2. Невозможность обнаружения морского объекта (например, орудия лова), в том числе находящегося в придонном слое осадков.
3. Незначительная дальность из-за низкого соотношения сигнал/помеха (С/П), особенно в условиях повышенных шумов моря (из-за волнения моря и т.д.) на выходе приемной части устройства.
4. Низкая достоверность распознавания морского объекта.
Известен способ формирования в водной среде направленного низкочастотного (НЧ) излучения сигналов, основанный на закономерностях параметрического преобразования в нелинейной водной среде ВЧ волн накачки. Способ заключается в облучении водной среды ультразвуковыми сигналами на близких частотах и формировании в водной среде высоконаправленного излучения волны разностной частоты (ВРЧ), распространяющейся в направлении морского объекта; приеме и идентификации гидроакустических сигналов ВРЧ, прошедших через водную среду и отразившихся от морского объекта, а также определении пространственных координат морских объектов и принятии решения об их обнаружении [3].
К недостаткам данного способа относятся:
1. Низкая эффективность способа из-за малого значения коэффициента преобразования акустической энергии ВЧ-волн накачки в акустическую энергию НЧ-волны разностной частоты.
2. Сложность обнаружения морского объекта с незначительным уровнем подводных шумов и сигналов (например, разряженных скоплений рыбы, скоплений беспозвоночных и др.).
3. Незначительная дальность, из-за низкого соотношения сигнал/помеха (С/П), особенно в условиях повышенных шумов моря (из-за волнения моря и т.д.) на выходе приемной части устройства.
4. Низкая достоверность распознавания морского объекта.
Наиболее близким по технической сущности к заявляемому способу относится способ, выбранный в качестве способа-прототипа, формирования направленного излучения НЧ сигналов, заключающийся в формировании, усилении и излучении в водную среду двух ВЧ сигналов накачки на частотах ω 1 и ω 2, близких к резонансной частоте биологических рассеивателей звука ω s, доминирующих в области взаимодействия ВЧ сигналов накачки в данное время суток в конкретном географическом районе Мирового океана, генерации в водной среде НЧ волны разностной частоты Ω 1=ω 1-ω 2, лоцировании с ее помощью исследуемого, приеме отраженной волны разностной частоты Ω ’1, распознавании исследуемого объекта и определении его пространственных координат [4].
К недостаткам данного способа относятся:
1. Низкая эффективность способа при отсутствии биологических рассеивателей звука (их незначительной концентрации) в области взаимодействия ВЧ волн накачки.
2. Низкая помехоустойчивость способа из-за ненаправленного (слабо направленного) приема отраженных сигналов.
3. Сложность обнаружения и пеленгования малоразмерного (с малой отражательной способностью) морского объекта.
4. Низкая достоверность распознавания морских объектов.
Задача, которая решается изобретением, заключается в разработке способа, свободного от перечисленных выше недостатков.
Технический результат предложенного способа заключается в эффективном поиске, распознавании и определении пространственных координат немаркированных (браконьерских) орудий лова, находящихся на грунте и в придонном слое осадков, в интересах обеспечения рационального использования морских биологических ресурсов.
Поставленная цель достигается тем, что в известном способе, заключающемся в формировании, усилении и излучении в водную среду ВЧ сигналов накачки на частотах ω 1 и ω 2, близких к резонансной частоте рассеивателей звука, доминирующих в области взаимодействия ВЧ сигналов накачки на частотах ω 1 и ω 2, при помощи первого излучателя ВЧ сигналов, расположенного в нижней части корпуса судна, генерации в водной среде волны разностной частоты Ω 1=ω 1-ω 2, лоцировании с ее помощью исследуемого объекта, приеме отраженной волны разностной частоты Ω ’1, распознавании исследуемого объекта и определении его пространственных координат, в качестве исследуемого объекта используются немаркированные орудия лова; ВЧ сигналы накачки на частотах ω 1 и ω 2 близки к резонансной частоте пузырьков воздуха ω 0, находящихся в приповерхностном слое воды в районе расположения первого излучателя ВЧ сигналов накачки ω 1 и ω 2; волна разностной частоты Ω 1 является относительно широкополосной; дополнительно осуществляется формирование, усиление и излучение в водную среду ВЧ сигналов накачки на частотах ω 3 и ω 4 при помощи второго излучателя ВЧ сигналов, расположенного в нижней части корпуса судна, в водной среде происходит генерация широкополосной волны разностной частоты Ω 2=ω 3-ω 4, с помощью которой лоцируется вся толща воды, принимается отраженная волны разностной частоты Ω ’2, определяются акустические характеристики рассеивателей звука и их пространственное положение во всей толще воды; дополнительно формируется, усиливается и непрерывно излучается в водную среду при помощи третьего излучателя ВЧ сигналов, расположенного в нижней части корпуса судна, ВЧ сигнал накачки на частоте ω н1, близкой к субгармонике резонансной частоты пузырьков воздуха ω 0, находящихся в приповерхностном слое воды в районе расположения третьего излучателя ВЧ сигналов; дополнительно осуществляется формирование, усиление и излучение в водную среду ВЧ сигналов накачки на частотах ω 5 и ω 6, при помощи четвертого излучателя ВЧ сигналов, расположенного в нижней части буксируемого на заданной глубине при помощи кабель-троса подводного аппарата, в водной среде происходит генерация волны относительно узкополосной разностной частоты Ω 3=ω 5-ω 6, лоцируется с ее помощью немаркированные орудия лова, принимается отраженная волна разностной частоты Ω ’3, более точно распознаются немаркированные орудия лова и более точно определяются их пространственные координаты; дополнительно формируется, усиливается и непрерывно излучается в водную среду помощи пятого излучателя ВЧ сигналов, расположенного в нижней части буксируемого подводного аппарата, ВЧ сигнал накачки на частоте ω н2, близкой к резонансной частоте рассеивателей звука ω s, доминирующих на горизонте нахождения буксируемого подводного аппарата в районе расположения пятого излучателя ВЧ сигналов; прием отраженных сигналов на разностных частотах Ω ’1, Ω ’2 и Ω ’3, а также шумоизлучения Ω б МБО, находящихся в немаркированных орудиях лова, осуществляется при помощи широкополосного приемника, расположенного в нижней части буксируемого подводного аппарата; дополнительно в водной среде происходит нелинейное взаимодействие рассеянных в обратном направлении ВЧ волн накачки ω ’н1 и ω ’н2 с отраженными волнами на разностных частотах Ω ’1, Ω ’2 и Ω ’3, а также шумоизлучением Ω б МБО, при этом образуются ВЧ волны на комбинационных частотах ω ’н1±Ω’1, ω ’н1±Ω’2, ω ’н1±Ω’3, ω ’н1±Ω б, ω ’н2±Ω’1, ω ’н2±Ω’2, ω ’н2±Ω’3 и ω ’н2±Ω б, которые принимаются с помощью первого ВЧ приемника, расположенного в нижней части корпуса судна и с помощью второго ВЧ приемника, расположенного в нижней части буксируемого подводного аппарата, после демодуляции выделяются сигналы на разностных частотах Ω ’1, Ω ’2 и Ω ’3, а также шумоизлучение Ω б МБО; дополнительно используется информация о текущих координатах судна, получаемая с помощью спутниковой навигационной системы; дополнительно используется ЭВМ для обработки сигналов на частотах Ω ’1, Ω ’2, Ω ’3, Ω б, ω ’н1±Ω’1, ω ’н1±Ω’2, ω ’н1±Ω’3, ω ’н1±Ω б, ω ’н2±Ω’1, ω ’н2±Ω’2, ω ’н2±Ω’3 и ω ’н2±Ω б, а также для акустической спектроскопии рассеивателей звука во всей толще воды, распознавания и оценки пространственных координат немаркированных орудий лова.
Повышение эффективности поиска немаркированных орудий лова достигается за счет того, что:
1. Оптимизируется (с точки зрения максимальной эффективности взаимодействия акустических волн при их распространении в водной среде) работа всех трактов параметрического излучения и направленного параметрического приема сигналов, расположенных на судне и в БПА:
- предварительно проводится с помощью тракта параметрического излучения широкополосных сигналов акустическая спектроскопия рассеивателей звука, доминирующих во всей толще воды;
- параметры сигналов накачки для трактов параметрического излучения и направленного параметрического приема сигналов выбираются на основе полученных данных по акустической спектроскопии рассеивателей звука (исходя из максимальной нелинейности водной среды на резонансных частотах рассеивателей звука), что приводит к повышению эффективности использования данных трактов в целом.
2. Используются судовые тракты параметрического излучения интенсивных относительно широкополосных сигналов, непрерывного излучения интенсивного ВЧ сигнала накачки и направленного параметрического приема широкополосных сигналов и для обследования большой площади дна, но при относительно малом пространственном разрешении.
3. Комплексируется и обрабатывается на ЭВМ информация от трактов параметрического излучения, направленного параметрического приема и линейного приема сигналов, расположенных на судне и в БПА.
Повышение эффективности (достоверности) распознавания немаркированных орудий лова достигается за счет того, что:
1. Используется БПА с трактами параметрического излучения относительно узкополосных и менее интенсивных сигналов, непрерывного излучения менее интенсивного ВЧ сигнала накачки, высоконаправленного параметрического приема широкополосных сигналов и линейного приема широкополосных сигналов. При этом БПА буксируется на заданной глубине и курсе, вдали от судна - для обеспечения высокой помехоустойчивости трактов приема (параметрического и линейного) сигналов, более детального обследования дна и слоя осадков, в том числе с находящимися на грунте немаркированными орудиями лова.
2. Комплексируется и обрабатывается на ЭВМ информация от трактов параметрического излучения, направленного параметрического приема и линейного приема сигналов, расположенных на судне и в БПА.
Повышение эффективности (точности) определения пространственных координат немаркированных достигается за счет того, что:
1. Используется информация о пространственном положении судна, БПА и, в конечном итоге, немаркированного орудия лова от судовой высокоточной навигационной спутниковой системы.
2. Комплексируется и обрабатывается на ЭВМ информация от трактов параметрического излучения, направленного параметрического приема и линейного приема сигналов, расположенных на судне и в БПА.
Отличительные от прототипа признаки заявляемого способа:
1. B качестве исследуемого объекта используются немаркированные орудия лова, находящиеся на грунте и в придонном слое осадков.
2. ВЧ сигналы накачки на частотах ω 1 и ω 2 близки к резонансной частоте пузырьков воздуха ω 0, находящихся в приповерхностном слое воды в районе расположения первого излучателя ВЧ сигналов накачки.
3. Волна разностной частоты Ω 1 является относительно широкополосной.
4. Дополнительно осуществляется формирование, усиление и излучение в водную среду ВЧ сигналов накачки на частотах ω 3 и ω 4 при помощи второго ВЧ излучателя, расположенного в нижней части корпуса судна, в водной среде происходит генерация широкополосной волны разностной частоты Ω 2=ω 3-ω 4, с помощью которой лоцируется вся толща воды, принимается отраженная волны разностной частоты Ω ’2, определяются акустические характеристики рассеивателей звука и их пространственное положение во всей толще воды.
5. Дополнительно формируется, усиливается и непрерывно излучается в водную среду помощи третьего ВЧ излучателя, расположенного в нижней части корпуса судна, ВЧ сигнал накачки на частоте ω н1, близкой к субгармонике резонансной частоты пузырьков воздуха ω 0, находящихся в приповерхностном слое воды в районе расположения третьего ВЧ излучателя.
6. Дополнительно осуществляется формирование, усиление и излучение в водную среду ВЧ сигналов накачки на частотах ω 5 и ω 6, при помощи четвертого ВЧ излучателя, расположенного в нижней части буксируемого на заданной глубине при помощи кабель-троса подводного аппарата, в водной среде происходит генерация волны относительно узкополосной разностной частоты Ω 3=ω 5-ω 6, лоцируются с ее помощью немаркированные орудия лова, принимается отраженная волна разностной частоты Ω ’3, более точно распознаются немаркированные орудия лова и более точно определяются их пространственные координаты.
7. Дополнительно формируется, усиливается и непрерывно излучается в водную среду при помощи пятого ВЧ излучателя, расположенного в нижней части буксируемого подводного аппарата, ВЧ сигнал накачки на частоте ω н2, близкой к резонансной частоте рассеивателей звука ω s, доминирующих на горизонте нахождения буксируемого подводного аппарата в районе расположения пятого ВЧ излучателя.
8. Прием отраженных сигналов на разностных частотах Ω ’1, Ω ’2 и Ω ’3, а также шумоизлучения Ω б МБО, находящихся в немаркированных орудиях лова, осуществляется при помощи широкополосного приемника, расположенного в нижней части бусксируемого подводного аппарата.
9. Дополнительно в водной среде происходит нелинейное взаимодействие рассеянных в обратном направлении ВЧ волн накачки ω ’н1 и ω ’н2 с отраженными волнами на разностных частотах Ω ’1, Ω ’2 и Ω ’3, а также шумоизлучением Ω б МБО, при этом образуются ВЧ волны на комбинационных частотах ω ’н1±Ω’1, ω ’н1±Ω’2, ω ’н1±Ω’3, ω ’н1±Ω б, ω ’н2±Ω’1, ω ’н2±Ω’2, ω ’н2±Ω’3 и ω ’н2±Ω б, которые принимаются с помощью первого ВЧ приемника, расположенного в нижней части корпуса судна и с помощью второго ВЧ приемника, расположенного в нижней части буксируемого подводного аппарата, после демодуляции выделяются сигналы на разностных частотах Ω ’1, Ω ’2 и Ω ’3, а также шумоизлучение Ω б МБО.
10. Дополнительно используется информация о текущих координатах судна, получаемая с помощью спутниковой навигационной системы.
11. Дополнительно используется ЭВМ для обработки сигналов на частотах Ω ’1, Ω ’2, Ω ’3, ω ’н1±Ω’1, ω ’н1±Ω’2, ω ’н1±Ω’3, ω ’н1±Ω б, ω ’н2±Ω’1, ω ’н2±Ω’2, ω ’н2±Ω’3 и ω ’н2±Ω б, а также для акустической спектроскопии рассеивателей звука во всей толще воды, распознавания и оценки пространственных координат немаркированных орудий лова.
Наличие отличительных от прототипа признаков позволяет сделать вывод о соответствии заявляемого способа критерию "новизна".
Анализ известных технических решений с целью обнаружения в них указанных отличительных признаков показал следующее.
Признаки 1 и 10 являются известными в промышленном рыболовстве, а признак 8 известен в гидроакустике.
Признаки 2-9 и 11 являются новыми. В то же время известно использование признаков 2-5, 7 в нелинейной гидроакустике для повышения эффективности применения параметрических излучающих и параметрических приемных антенн. Известно также использование БПА при исследовании морских осадков в морской геофизике и поиске морских объектов, находящихся на грунте.
Таким образом, наличие новых признаков, в совокупности с известными, обеспечивает появление у заявляемого решения нового свойства, не совпадающего со свойствами известных технических решений, - обеспечить эффективный поиск, достоверное распознавание и точное определение пространственных координат немаркированных (браконьерских) орудий лова, находящихся на грунте и в придонном слое осадков, в интересах обеспечения рационального использования морских биологических ресурсов.
В данном случае мы имеем новую совокупность признаков и их новую взаимосвязь, причем не простое объединение новых признаков и уже известных в гидроакустике (в том числе и нелинейной гидроакустике), промышленном рыболовстве, в морской геофизике и мореплавании, а именно выполнение операций в предложенной последовательности и приводит к качественно новому эффекту.
Данное обстоятельство позволяет сделать вывод о соответствии разработанного способа критерию "существенные отличия".
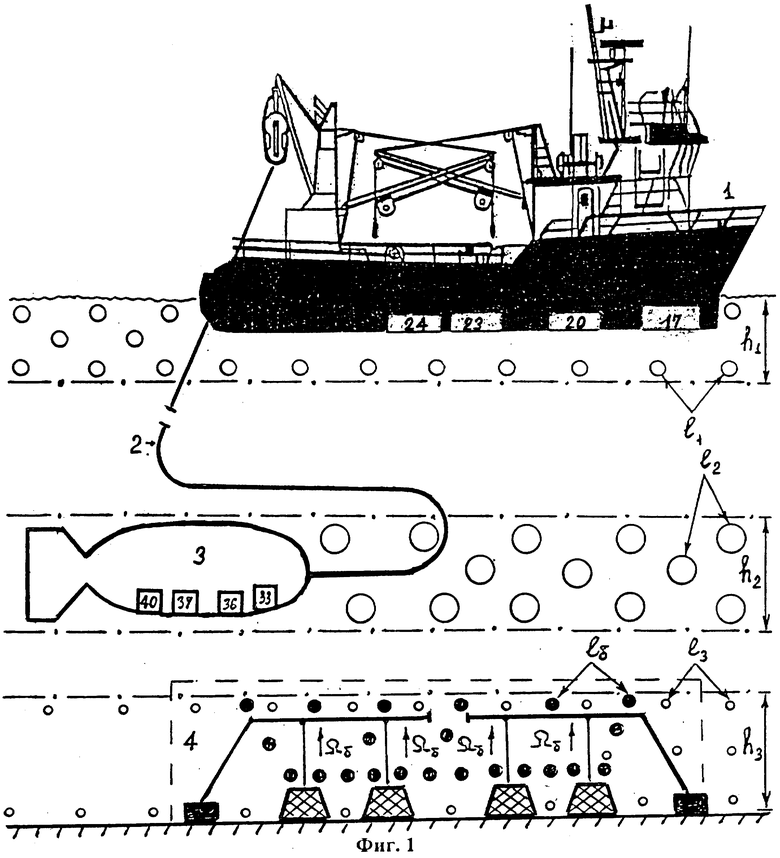
На фиг.1 представлена функциональная схема реализации разработанного способа поиска немаркированных (браконьерских) орудий лова, находящихся на грунте и в придонном слое осадков.
На фиг.2, 3 и 4 представлены структурные схемы устройства, реализующего разработанный способ высоконаправленного излучения и приема широкополосных гидроакустических сигналов.
Устройство содержит судно (1), буксируемый при помощи кабель-троса (2) подводный аппарат (3) и немаркированное орудие лова (4), находящееся на грунте и в придонном слое осадков. На судне (1) находится спутниковая навигационная система (5), ЭВМ (6), а также тракты: параметрического излучения интенсивных относительно широкополосных сигналов (7); параметрического излучения широкополосных сигналов (8); непрерывного излучения интенсивного ВЧ сигнала накачки (9); направленного параметрического приема широкополосных сигналов (10). На буксируемом подводном аппарате (3) находятся тракты: параметрического излучения относительно узкополосных и менее интенсивных сигналов (11); непрерывного излучения менее интенсивного ВЧ сигнала накачки (12); высоконаправленного параметрического приема широкополосных сигналов (13) и линейного приема широкополосных сигналов (14).
При этом на судне (1) тракт параметрического излучения интенсивных относительно широкополосных сигналов (7) содержит последовательно электрически соединенные блок формирования сигналов накачки (15) на частотах ω 1 и ω 2, первый усилитель мощности (16) и первый излучатель (17) ВЧ сигналов накачки на частотах ω 1 и ω 2, близких к резонансной частоте пузырьков воздуха ω 0, находящихся в приповерхностном слое воды в районе расположения первого излучателя ВЧ сигналов накачки (17); тракт параметрического излучения широкополосных сигналов (8) содержит последовательно электрически соединенные блок формирования сигналов накачки (18) на частотах ω 3 и ω 4, второй усилитель мощности (19) и второй излучатель (20) ВЧ сигналов накачки на частотах ω 3 и ω 4; тракт непрерывного излучения интенсивного ВЧ сигнала накачки (9) содержит последовательно электрически соединенные блок формирования сигналов (21) на частоте накачки ω н1, третий усилитель мощности (22) и третий излучатель (23) ВЧ сигнала накачки на частоте ω н1, близкой к субгармонике резонансной частоты пузырьков воздуха ω 0, находящихся в приповерхностном слое воды в районе расположения третьего излучателя ВЧ сигнала накачки (23); тракт (10) направленного параметрического приема широкополосных сигналов на частотах ω ’н1±Ω’1, ω ’н1±Ω’2, ω ’н1±Ω’3 и ω ’н1±Ω б содержит последовательно электрически соединенные первый ВЧ приемник (24), расположенный в нижней части корпуса судна, блоки фильтров (25), (26) и (27), соответственно, для фильтрации сигналов на частотах ω ’н1±Ω’1 и ω ’н1±Ω’3, а также ω ’н1±Ω’2 и ω ’н1±Ω б и соответствующие блокам фильтров (25), (26) и (27) блоки обработки (18), (29) и (30) сигналов на частотах ω ’н1±Ω’1 и ω ’н1±Ω’3, а также ω ’н1±Ω’2 и ω ’н1±Ω б.
При этом на буксируемом подводном аппарате (3) тракт параметрического излучения относительно узкополосных и менее интенсивных сигналов (11) содержит последовательно электрически соединенные блок (31) формирования ВЧ сигналов накачки на частотах ω 5 и ω 6, четвертый усилитель мощности (32) и четвертый излучатель (33) ВЧ сигналов накачки на частотах ω 5 и ω 6, расположенный в нижней части буксируемого на заданной глубине подводного аппарата; тракт непрерывного излучения менее интенсивного ВЧ сигнала накачки (12) содержит последовательно соединенный блок (34) формирования сигнала накачки на частоте ω н2, пятый усилитель мощности (35) и пятый излучатель (36) ВЧ сигнала накачки на частоте ω н2, близкой к резонансной частоте рассеивателей звука ω s, доминирующих на горизонте нахождения буксируемого подводного аппарата в районе расположения пятого излучателя ВЧ сигнала накачки; тракт высоконаправленного параметрического приема широкополосных сигналов (13) содержит последовательно электрически соединенные второй ВЧ приемник (37) сигналов ω ’н2±Ω’1, ω ’н2±Ω’2, ω ’н2±Ω’3 и ω ’н2±Ω б, многоканальный блок фильтров (38) ВЧ сигналов и многоканальный блок обработки сигналов ВЧ сигналов (39); тракт линейного приема широкополосных сигналов (14) содержит последовательно электрически соединенные широкополосный приемник (40) сигналов на разностных частотах Ω ’1, Ω ’2 и Ω ’3, а также шумоизлучения Ω б МБО, находящихся в немаркированном орудии лова (4), многоканальный блок фильтров (41) широкополосных сигналов Ω ’1, Ω ’2, Ω ’3 и Ω б, а также многоканальный блок (42) обработки широкополосных сигналов Ω ’1, Ω ’2, Ω ’3 и Ω б.
Немаркированное орудие лова (4), находящееся на грунте и в придонном слое осадков, содержит последовательно соединенные между собой при помощи специального фала (43) ловушки (44) для МБО (45). При этом немаркированное орудие лова удерживается на дне при помощи двух якорей (46), расположенных по обоим его краям.
Способ реализуется следующим образом (фиг.1, 2, 3 и 4). Судно (1), производящее поиск немаркированного орудия лова (4), буксирует при помощи кабель-троса (2) подводный аппарат (3). На судне (1) находится спутниковая навигационная система (5), позволяющая с высокой точностью определять координаты судна в пространстве, а также ЭВМ (6), обеспечивающая управление работой всех трактов, находящихся на судне (1) и буксируемом подводном аппарате (3). Кроме того, ЭВМ (6) решает, в конечном итоге, задачи эффективного поиска, распознавания и определения пространственных координат немаркированных орудий лова (4), находящихся на грунте и в придонном слое осадков. При этом в соединенных между собой при помощи специального фала (43) ловушках (44) находятся МБО (45), издающие в процессе своей жизнедеятельности широкополосные сигналы Ω б.
В тракте параметрического излучения широкополосных сигналов (8) при помощи последовательно электрически соединенных блока формирования сигналов накачки (18) на частотах ω 3 и ω 4, второго усилителя мощности (19) и второго излучателя (20) ВЧ сигналов накачки осуществляется формирование, усиление до необходимого уровня и излучение в водную среду ВЧ сигнала накачки на частотах ω 3 и ω 4. В водной среде происходит генерация широкополосной волны разностной частоты Ω 2=ω 3-ω 4, с помощью которой лоцируется вся толща воды от поверхности до дна.
В тракте непрерывного излучения интенсивного ВЧ сигнала накачки (9) с помощью последовательно электрически соединенных блока формирования сигналов (21) на частоте накачки ω н1, третьего усилителя мощности (22) и третьего излучателя (23) ВЧ сигнала накачки осуществляется формирование, усиление до необходимого уровня и излучение в водную среду ВЧ сигнала накачки на частоте ω н1, близкой к субгармонике резонансной частоты пузырьков воздуха ω 0, находящихся в приповерхностном слое воды в районе расположения третьего излучателя ВЧ сигнала накачки (23). В водной среде происходит нелинейное взаимодействие рассеянной в обратном направлении ВЧ волны накачки ω ’н1 с отраженной от неоднородностей (рассеиватели звука, находящиеся во всей толще воды) водной среды широкополосной волной Ω ’2. При этом образуется ВЧ волна на комбинационной частоте ω ’н1±Ω’2, которая принимается с помощью первого ВЧ приемника (24), расположенного в нижней части корпуса судна (1), тракта (10) параметрического приема широкополосных сигналов. Далее ВЧ сигнал на комбинационной частоте ω ’н1±Ω’2 поступает на вход блока фильтров (26), где осуществляется подавление ВЧ помех. С выхода блока фильтров (26) ВЧ сигнал на комбинационной частоте ω ’н1±Ω’2 поступает на соответствующий блок обработки сигналов (29), в котором осуществляется выделение полезного широкополосного сигнала Ω ’2 из ВЧ сигнала на комбинационной частоте ω ’н1±Ω’2 методом детектирования. С выходя блока обработки (29) широкополосный сигнал Ω ’2 поступает на вход ЭВМ, где его сравнивают с эталонным сигналом Ω 2 и принимают решение о пространственных (горизонт нахождения, протяженность и др.) и акустических (резонансная частота, сила слоя и др.) характеристиках ЗРС, находящихся во всей толще воды (осуществляется акустическая спектроскопия рассеивателей звука). Например (фиг.1), вертикальная протяженность приповерхностного ЗРС составляет h1 (м), а резонансный размер доминирующих в слое пузырьков воздуха составляет l1, вертикальная протяженность глубинного биологического ЗРС составляет h2 (м), а резонансный размер доминирующих в слое пузырьков воздуха составляет l2, вертикальная протяженность придонного биологического ЗРС составляет h3 (м), а резонансный размер доминирующих в слое пузырьков воздуха составляет l3. Исходя из полученных результатов по акустической спектроскопии рассеивателей звука, горизонт буксировки подводного аппарата (3) устанавливается равным верхней границе слоя глубинного биологического ЗРС или верхней границе слоя придонного биологического ЗРС.
При этом в тракте параметрического излучения относительно широкополосных сигналов (7) с помощью последовательно электрически соединенных блока формирования ВЧ сигналов накачки (15) на частотах ω 1 и ω 2, первого усилителя мощности (16) и первого излучателя (17) ВЧ сигналов накачки на частотах ω 1 и ω 2 осуществляется формирование, усиление до необходимого уровня и излучение ВЧ сигнала накачки на частотах ω 1 и ω 2, близких к резонансной частоте ω 0 пузырьков воздуха (на фиг.1 размером l1), находящихся в приповерхностном слое воды в районе расположения первого излучателя (17) ВЧ сигналов накачки ω 1 и ω 2. В водной среде происходит генерация относительно широкополосной волны разностной частоты Ω 1=ω 1-ω 2, с помощью которой лоцируется на большой площади дно, в том числе и немаркированное орудие лова, находящееся на грунте и в придонном слое осадков под различным углом к курсу движения судна (1). В тракте (11) параметрического излучения относительно узкополосных и менее интенсивных сигналов с помощью последовательно электрически соединенных блока (31) формирования ВЧ сигналов накачки на частотах ω 5 и ω 6, четвертого усилителя мощности (32) и четвертого излучателя (33) ВЧ сигналов накачки на частотах ω 5 и ω 6 осуществляется формирование, усиление до необходимого уровня и излучение в водную среду ВЧ сигналов накачки на частотах ω 5 и ω 6. В водной среде происходит генерация волны относительно узкополосной разностной частоты Ω 3=ω 5-ω 6, лоцируется с ее помощью немаркированное орудие лова (на меньшей дальности, в узком телесном угле, на оптимальном курсе движения буксируемого подводного аппарата и т.д.), принимается отраженная волна разностной частоты Ω ’3 и более достоверно (в конечном случае) распознаются немаркированные орудия лова и более точно определяются их координаты.
В тракте непрерывного излучения менее интенсивного ВЧ сигнала накачки (12) с помощью последовательно электрически соединенных блока (34) формирования сигнала накачки на частоте ω н2, пятого усилителя мощности (35) и пятого излучателя (36) ВЧ сигнала накачки осуществляется формирование, усиление до необходимого уровня и излучение ВЧ сигнала накачки на частоте ω н2, близкой к резонансной частоте ω s рассеивателей звука (на фиг.1 размером l2), доминирующих на горизонте нахождения буксируемого подводного аппарата (3) в районе расположения пятого излучателя (36) ВЧ сигнала накачки.
В водной среде происходит нелинейное взаимодействие рассеянных в обратном направлении ВЧ волн накачки ω ’н1 и ω ’н2 с отраженными волнами на разностных частотах Ω ’1, Ω ’2 и Ω ’3, а также шумоизлучением Ω б МБО, при этом образуются ВЧ волны на комбинационных частотах ω ’н1±Ω’1, ω ’н1±Ω’2, ω ’н1±Ω’3, ω ’н1±Ω б и ω ’н2±Ω’1, ω ’н2±Ω’2, ω ’н2±Ω’3, ω ’н2±Ω б, которые принимаются соответственно с помощью первого ВЧ приемника (24) тракта (10) параметрического приема широкополосных сигналов и с помощью второго ВЧ приемника (37) тракта высоконаправленного параметрического приема широкополосных сигналов (13). Далее (по аналогии с ВЧ сигналом на комбинационной частоте ω ’н1±Ω’2) ВЧ сигналы на комбинационных частотах ω ’н1±Ω’1, ω ’н1±Ω’3, и ω ’н1±Ω б поступают на входы соответствующих блоков фильтров (25) и (27), где осуществляется подавление ВЧ помех. С выхода блока фильтров (26) ВЧ сигналы на комбинационных частотах ω ’н1±Ω’1, ω ’н1±Ω’3, и ω ’н1±Ω б поступают на входы соответствующих блоков обработки сигналов (28) и (30), в которых осуществляется выделение полезных широкополосных сигналов Ω ’1, Ω ’2 и Ω ’б из ВЧ сигналов на комбинационных частотах ω ’н1±Ω’1, ω ’н1±Ω’3 и ω ’н1±Ω б методом детектирования. С выходов блоков обработки сигналов (28) и (30) широкополосные сигналы Ω ’1, Ω ’2 и Ω ’б поступают на вход ЭВМ. Одновременно с этим сигналы на ВЧ комбинационных частотах ω ’н2±Ω’1, ω ’н2±Ω’2, ω ’н2±Ω’3, ω ’н2±Ω б поступают с выхода второго ВЧ приемника (37) на вход многоканального блока фильтров (38), где осуществляется подавление ВЧ помех по каждому каналу (каждой ВЧ комбинационной частоте). С выхода блока фильтров (26) ВЧ сигналы на комбинационных частотах ω ’н2±Ω’1, ω ’н2±Ω’2, ω ’н2±Ω’3, ω ’н2±Ω б поступают на соответствующие входы многоканального блока обработки сигналов (39), в которых осуществляется выделение широкополосных сигналов Ω ’1, Ω ’2, Ω ’3, и Ω б из ВЧ сигналов на комбинационных частотах ω ’н2±Ω’1, ω ’н2±Ω’2, ω ’н2±Ω’3, ω ’н2±Ω б методом детектирования. С выхода многоканального блока обработки сигналов (39) полезные широкополосные сигналы Ω ’1, Ω ’3 и Ω б поступают на вход ЭВМ.
Одновременно с этим в тракте линейного приема широкополосных сигналов (14) с помощью последовательно электрически соединенных широкополосного приемника (40), расположенного в нижней части буксируемого подводного аппарата (3), многоканального блока фильтров (41) и многоканального блока (42) обработки широкополосных сигналов осуществляется прием, фильтрация и обработка отраженных сигналов на разностных частотах Ω ’1, Ω ’2 и Ω ’3, а также шумоизлучения Ω б МБО, находящихся в немаркированном орудии лова (4). В ЭВМ все полезные сигналы Ω ’1, Ω ’3 и Ω б сравнивают с эталонными сигналами Ω 1, Ω 3 и Ω б и принимают окончательное решение об обнаружении, идентификации и определении пространственных координат немаркированного (баконьерского) орудия лова, находящегося на грунте и в придонном слое осадков.
На фиг.5 представлены типовые, экспериментально полученные, зависимости параметра нелинейности ε водной среды (вертикальная ось) от частоты сигнала (f, кГц) и горизонта (× 2 m) расположения акустической системы “излучатель - приемник” для южных (фиг.5а) и северных (фиг.5б) географических районов [5]. Как видно из фиг.5 существует ярко выраженная зависимость параметра нелинейности от частоты (в диапазоне ~от 7 до ~52 кГц) и глубины (в диапазоне от ~22 до ~60 м) для приповерхностного слоя пузырьков воздуха, образующихся в воде при ветровом волнении (на фиг.1 слой h1 с характерными размерами пузырьков l1). При этом (фиг.5а) значение параметра нелинейности на частоте ~32 кГц достигает величины ~300, что ~на 2 порядка выше, чем для параметра нелинейности однородной (не содержащей пузырьки воздуха) водной среды [6].
На фиг.6а, б представлены эхограммы сигналов с фиксированной частотой 25,5 кГц, зарегистрированные на выходе судового навигационно-рыбопоискового эхолота НЭЛ-5Р при проведении испытаний разработанного способа. Как видно из фиг.6а, б дополнительную (к приповерхностному пузырьковому слою) неоднородность (нелинейность) могут вносить биологические ЗРС, поднимающиеся в ночные часы с глубины в верхние слои моря. На фиг.6в, г представлено вертикальное распределение скорости звука (С) по глубине (Н) и осциллограмма зондирующего сигнала эхолота НЭЛ-5Р соответственно в диапазоне глубин от 10 до 200 м в одном из районов Охотского моря при проведении морских испытаний. Как видно из фиг.6в в приповерхностном слое моря регистрируется резкий перепад скорости звука (~ до 25 м/с), обусловленный наличием в слое пузырьков воздуха. Наличие рассеивателей звука в приповерхностном слое моря при типовом ветровом волнении подтверждают осциллограммы сигналов с эхолота НЭЛ-5Р, представленные на фиг.6г, 7б, г. При этом на осциллограмме, иллюстрирующейся фиг.6г, отчетливо видно и наличие придонного ЗРС, обусловленного наличием биологических ЗРС (на фиг.1 слой h3 с характерными размерами пузырьков l3).
На фиг.7а, в и на фиг.7б, г представлены вертикальные распределения скорости звука (С) по глубине (Н) и осциллограмма зондирующего сигнала эхолота НЭЛ-5Р соответственно в диапазоне глубин от 10 до 200 м в некоторых районах Охотского моря при проведении экспериментальных исследований. Как видно из фиг.7а, в в приповерхностном слое моря регистрируется перепад скорости звука (~ до 20 м/с), обусловленный наличием в слое пузырьков воздуха, а в глубинном ЗРС регистрируется более резкий перепад скорости звука (~ до 30 м/с), обусловленный наличием в слое биологических ЗРС. Наличие рассеивателей звука в приповерхностном и глубинном слоях моря подтверждают и осциллограммы сигналов с эхолота НЭЛ-5Р, представленные на фиг.7б, г. При этом на осциллограмме, иллюстрирующейся фиг.7г, отчетливо видно и наличие трех глубинных ЗРС, обусловленных наличием в них биологических ЗРС (на фиг.1 слой h2 с характерными размерами пузырьков l2).
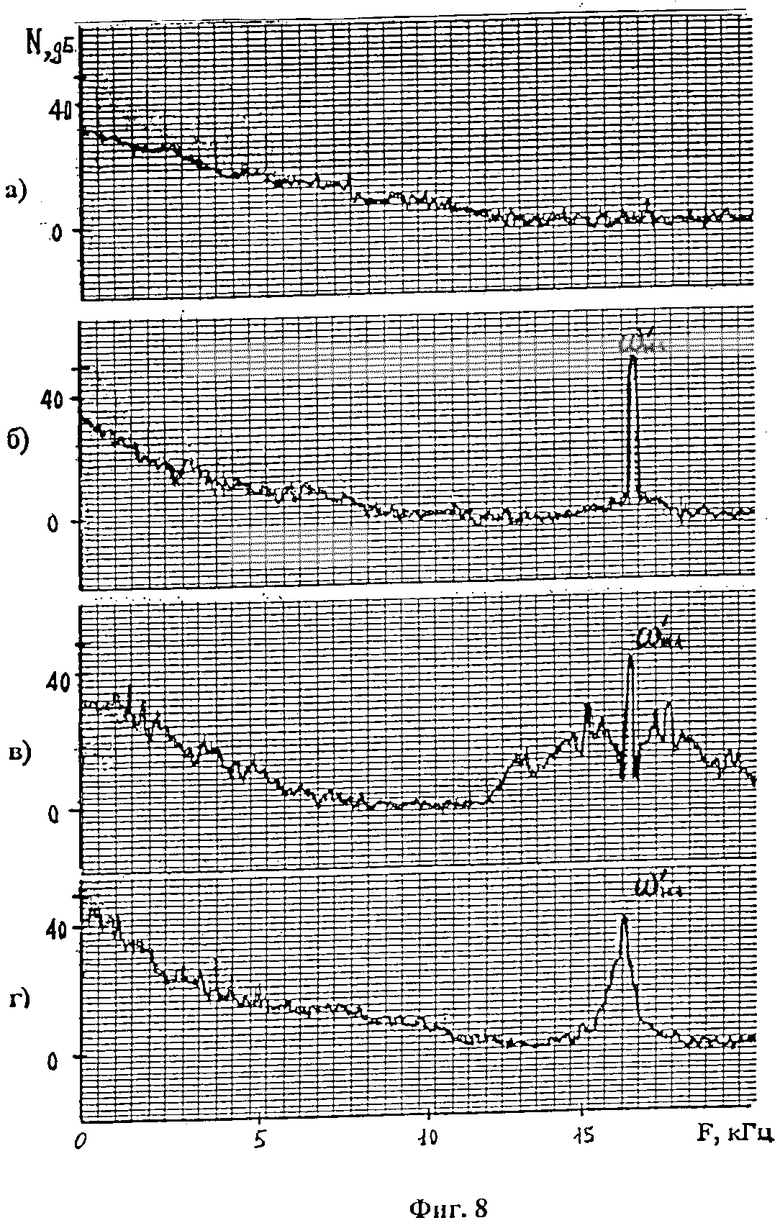
На фиг.8 иллюстрируется пример оперативного распознавания МБО, находящихся в немаркированном (браконьерском) орудии лова, по спектру сигналов комбинационных частот, зарегистрированных на выходе ВЧ приемника, расположенного на корпусе судна. При этом на фиг.8б представлена спектрограмма рассеянной ВЧ волны накачки ω ’н1 в отсутствии шумов МБО; на фиг.8в, г представлены спектрограммы ВЧ сигналов комбинационных частот ω ’н1±Ω б, зарегистрированные на выходе ВЧ приемника при наличии шумов МБО с преобладанием ВЧ составляющих в спектре их шумоизлучения (фиг.8в) и при наличии шумов МБО с преобладанием НЧ составляющих в спектре их шумоизлучения. На фиг.8а иллюстрируется спектрограмма акустических помех в диапазоне частот от единиц Гц до 20 кГц при отсутствии излучения ВЧ сигнала накачки на частоте ω н1. Как видно из фиг.8в, в случае преобладания в спектре шумоизлучения МБО Ω б ВЧ составляющих в районе ВЧ сигнала накачки ω ’н1 ВЧ комбинационные частоты регистрируются в виде “пьедестала”. В случае же преобладания в спектре шумоизлучения МБО Ω б НЧ составляющих в районе ВЧ сигнала накачки ω ’н1 ВЧ комбинационные частоты регистрируются в виде “колокола” (фиг.8г). При этом (фиг.8в, г) происходит уменьшение (~ на 6-8 дБ) уровня рассеянного ВЧ сигнала накачки ω ’н1 по сравнению с его аналогичным параметром в отсутствии шумящего объекта (фиг.8б).
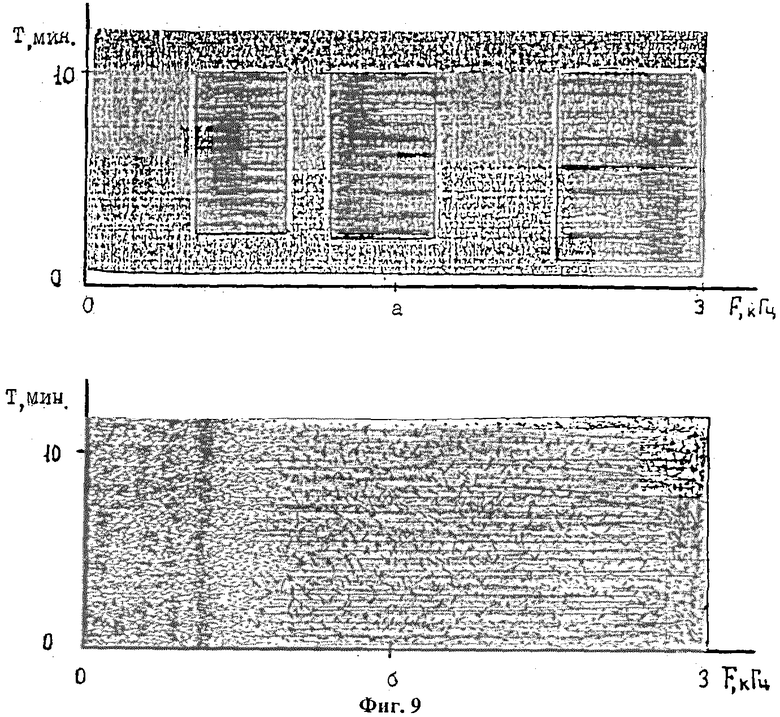
На фиг.9, для примера, представлены сонограммы шумов краба-стригуна opilio (фиг.9а) и камчатского краба (фиг.9б), зарегистрированные на выходе блока обработки сигналов при реализации разработанного способа поиска немаркированных орудий лова. Как видно из фиг.9а, в диапазоне частот от единиц Гц до 3 кГц отчетливо регистрируются три условных поддиапазона частот (400-600 Гц, 800-1200 Гц и 2,2-3 кГц) с характерными звуками краба-стригуна opilio. В то время как звуки камчатского краба (существенно отличающегося своим размером и строением тела) более низкочастотны и основная энергия их шумов соредоточена в диапазоне частот от 200 до 700 Гц (фиг.9б).
Таким образом, МБО (беспозвоночные, рыбы и др.) в немаркированных (браконьерских) орудиях лова могут быть обнаружены и идентифицированы по спектрам сигналов, зарегистрированных на входе и выходе тракта параметрического приема широкополосных сигналов (находящегося на судне и (или) в БПА), а также на выходе линейного тракта приема широкополосных сигналов, находящегося в БПА.
Пример реализации способа.
В 1998 г. в районе промысла был поднят на борт немаркированный порядок ловушек (100 шт.) с камчатским крабом. Для более точной оценки количества крабов, его видового и биологического состояния были взяты 3 ловушки (в начале, середине и конце порядка) и типовое (по группам) количество краба в них было усреднено. Из-за ограниченного времени непромысловые самцы (молодь) и самки были сведены в одну группу. Оказалось, что в одной “типовой” ловушке находится 58 особей краба, из них: ~25 шт.(~43%) - промысловые особи краба, а остальные 33 шт. (~57%) - молодь и самки. При этом 11 шт. (~20%) - погибший краб (исключительно молодь и самки), ~30% (18 шт.) - поврежденный краб (из них 2 шт. - промысловые особи, а 16 шт. - молодь и самки) и ~50% (29 шт.) - целые особи краба (из них 23 шт. - промысловые особи, а 6 шт. - молодь и самки). Другими словами, 22 шт. (~38%) от общей биомассы составляли погибшие и поврежденные самки и молодь краба, вылов которых категорически запрещен правилами ведения рыболовства. Таким образом, в одном утерянном порядке (из 100 ловушек) 290 шт. (~50%) крабов являлись некондиционными и составляли текущие экологические потери, а общие потери краба составляли 580 особей на один немаркированный крабовый порядок.
По аналогии оценим ущерб, наносимый популяции краба-стригуна opilio, одним немаркированным (браконьерским) крабовым порядком. В 1999 г. в районе промысла были подняты на борт судна 2 немаркированных порядка ловушек. Оказалось, что в одной такой “усредненной” ловушке находится ~98 особей данного краба, из них: -44 шт.(~45%) - промысловые особи, а остальные ~54 шт. (~55%) - молодь и самки. При этом ~14 шт. (~14%) - погибший краб (~2 шт. - промысловые особи, ~12 шт. - молодь и самки), ~28 шт. (~28%) - поврежденный краб (из них ~4 шт. - промысловые особи, а ~24 шт. - молодь и самки) и ~56 шт. (~57%) - целые особи краба (из них 38 шт. - промысловые особи, а 18 шт. - молодь и самки). Таким образом, в одном утерянном порядке (~100 ловушек) 420 шт. (~42%) крабов являлись некондиционными и составляли текущие экологические потери, а общие потери краба-стригуна opilio составляли 980 особей на один немаркированный (браконьерский) крабовый порядок.
Указанные выше цифры, конечно же, являются приближенными. Однако они в какой-то мере позволяют оценить масштаб экономических и экологических потерь, имеющих место при промысле краба в РФ, в том числе с использованием немаркированных (браконьерских) орудий лова.
Литература
1. Митько В.Б., Евтютов А.П., Гущин С.Е. Гидроакустические средства связи и наблюдения. - Л.: Судостроение, 1982, с.119.
2. Шишкова Е.В. Физические основы промысловой гидроакустики. - М.: Пищевая промышленность, 1977, с.213.
3. Новиков Б.К., Руденко С.В., Тимошенко В.Н. Нелинейная гидроакустика. - Л.: Судостроение, 1978, с.7-12.
4. Способ формирования направленного излучения низкочастотных сигналов. - Патент РФ №2096807, приоритет 01.02.94 г., заявка №94003782.
5. Буланов В.А. Акустика микронеоднородных жидкостей и методы акустической спектроскопии // Диссертация д.ф.-м.н. - Владивосток: ИПМТ ДВО РАН, 1996, с.358-391.
6. Новиков Б.К., Руденко С.В., Тимошенко В.Н. Нелинейная гидроакустика, - Л.: Судостроение, 1978, с.7-12.
7. Бахарев С.А., Бондарь Л.Ф., Горкавенко В.В. и др. Исследования влияния гидрофизических параметров морской среды на акустическое поле в морской шельфовой зоне. - Отчет о НИР “Акватория”, ГК по рыболовству. - Владивосток: Дальрыбвтуз, 1999, 151 с.






Изобретение относится к области промысловой гидроакустики и может быть использовано в рыбной промышленности для поиска немаркированных (браконьерских) орудий лова, находящихся на грунте и в придонном слое осадков. Технический результат заключается в эффективном поиске, распознавании и определении пространственных координат немаркированных (браконьерских) орудий лова, находящихся на грунте и в придонном слое осадков. Способ реализуется следующим образом. Судно, производящее поиск немаркированного орудия лова, буксирует при помощи кабель-троса подводный аппарат. На судне находится спутниковая навигационная система, позволяющая с высокой точностью определять координаты судна в пространстве, а также электронно-вычислительная машина (ЭВМ), обеспечивающая управление работой всех трактов, находящихся на судне и в буксируемом подводном аппарате. Кроме того, ЭВМ решает, в конечном итоге, задачи эффективного поиска, обнаружения, распознавания и определения пространственных координат немаркированных орудий лова, находящихся на грунте и в придонном слое осадков. При этом в соединенных между собой при помощи фала ловушках находятся морские биологические объекты, издающие в процессе своей жизнедеятельности широкополосные сигналы. 9 ил.
Способ поиска немаркированных (браконьерских) орудий лова, находящихся на грунте и в придонном слое осадков, заключающийся в формировании, усилении и излучении в водную среду высокочастотных сигналов накачки на частотах ω 1 и ω 2, близких к резонансной частоте рассеивателей звука, доминирующих в области взаимодействия высокочастотных сигналов накачки на частотах ω 1 и ω 2, при помощи первого излучателя высокочастотных сигналов, расположенного в нижней части корпуса судна, генерации в водной среде волны разностной частоты Ω 1=ω 1-ω 2, лоцировании с ее помощью исследуемого объекта, приеме отраженной волны разностной частоты Ω
| СПОСОБ ФОРМИРОВАНИЯ НАПРАВЛЕННОГО ИЗЛУЧЕНИЯ НИЗКОЧАСТОТНЫХ СИГНАЛОВ | 1994 |
|
RU2096807C1 |
| УСТРОЙСТВО КРАНА | 2006 |
|
RU2387907C2 |
| А.П.ЕВТЮТОВ и др | |||
| Справочник по гидроакустике | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| - Л.: Судостроение, 1988 | |||
| Параметрический эхолокатор | 1990 |
|
SU1815616A1 |
| ПАРАМЕТРИЧЕСКИЙ ЭХОЛОКАТОР С БУКСИРУЕМЫМ ПРЕОБРАЗОВАТЕЛЕМ НАКАЧКИ | 2000 |
|
RU2168742C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МОРСКИХ ОБЪЕКТОВ ПРИ ВСПЛЫТИИ ПОДВОДНОГО АППАРАТА | 2002 |
|
RU2215304C2 |

