Изобретение относится к управляемым и программируемым от персонального компьютера (ПК) с использованием радиотехнических средств подвижным устройствам. Предлагаемое изобретение может быть использовано как развивающая игрушка, функционировать как управляемый от персонального компьютера кукольный театр, использоваться в игровых салонах, входить в состав обучающих систем, использоваться в рекламных, презентационных и иных целях. Под подвижным устройством в рамках настоящего изобретения понимается объект, представленный материализированно в конкретной осмысленной форме (например, в форме игрушки - робота) и выполненный с возможностью совершения манипуляций отдельными своими узлами и возможностью воспроизведения звука, в том числе он может перемещаться по опорной поверхности. Кроме того, предлагаемая система может использоваться в качестве обучающей системы, предназначенной для выработки навыков написания программ с демонстрацией их функционирования на объектах.
Известна игровая система с компьютерным управлением, включающая подвижные объекты (машинки), центральную компьютерную станцию, двухсторонний полудуплексный канал радиосвязи между станцией и машинками с антеннами радиосвязи на станции и машинках, пульты дистанционного управления машинками через центральную станцию (РСТ, заявка №WO 98/34699, А 63 Н 30/04, опубл. 13.08.98).
Каждая из машинок содержит электромоторы, центральный модуль управления машинкой, модуль управления электромоторами, приемник радиосигнала управления, передатчик сигнала об исполнении команд, модули управления приемником радиосигнала управления и передатчика сигнала исполнения. Такая система позволяет через двухсторонний полудуплексный канал радиосвязи по очереди управлять движением всех машинок и получать информацию о выполнении команд на центральной станции.
Недостатком известной системы является то, что система обладает ограниченными возможностями программного управления машинками. Например, используемые в этой системе электронные компоненты не допускают ввод программ для управления машинками на языках высокого уровня. На машинках отсутствуют и датчики определения реальных признаков окружающей обстановки. Поэтому управление движением машинок в ряде случаев оказывается недостаточно адекватным обстановке, что создает условно-аварийные ситуации. Отсутствие канала прямой связи между машинками не дает возможности моделировать реальные игровые ситуации. Система не позволяет пользователю с пультом управления находиться вблизи машинок при их удалении от рабочей станции. Это существенно, например, при интерактивном управлении машинками не в том помещении, в котором находится станция. Все эти недостатки снижают функциональные возможности известной системы и ограничивают игровой аспект системы.
Наиболее близкой по технической сущности к предлагаемому изобретению является система управления подвижной игрушкой, включающая компьютер, приемопередающее устройство с антенной, соединенное кабелем с компьютером, соединенный кабелем с компьютером пульт управления системой, игрушку, включающую антенну, динамик, микрофон, электромоторы для осуществления механического передвижения игрушки в целом или ее частей, лампы световой сигнализации, датчики внешней обстановки (внешнего сигнала): контакта, температуры, светочувствительный датчик и др. (РСТ, заявка №WO 99/10065, А631-133/00, опубл. 04.03.1999).
Такая система позволяет управлять движением игрушки (объекта), имитировать разговор с ней, получать информацию через полудуплексный канал радиосвязи о выполнении команд с компьютера.
Данное известное решение принято в качестве прототипа для заявленного объекта.
Недостатком известной системы управления подвижной игрушкой является то, что пользователь обязательно должен находиться на близком расстоянии от компьютера, быть "привязанным" к нему, что снижает функциональные игровые возможности известной системы. Кроме того, в системе не предусмотрена возможность ретрансляции команд объектами. Это существенно, например, в том случае, когда не все объекты находятся в зоне гарантированного обмена с приемопередающим устройством, соединенным с ПК.
Настоящее изобретение направлено на решение технической задачи по расширению функциональных возможностей системы для реализации игровых аспектов, приближенных к реально действующим моделям поведения.
Технический результат данного изобретения заключается в расширении функциональных возможностей системы для ее использования в качестве игровой или обучающей системы.
Указанный технический результат достигается тем, что обучающе-игровая система с компьютерным управлением, включающая по крайней мере один персональный компьютер, базовый модуль приемопередатчика с антенной, соединенный с компьютером и обеспечивающий обмен информацией компьютера с объектами, по крайней мере один объект, включающий модуль для обеспечения обмена информацией между объектом и компьютером, между объектом и дистанционными пультами и между объектами друг с другом, центральный модуль управления объектом, выполненный с функцией адресации полученных сигналов исполнительным узлам объекта, антенну, снабженный соответствующими согласующими устройствами набор исполнительных элементов, в который входят динамик, моторы и специализированные излучатели, снабженный соответствующими согласующими устройствами набор датчиков, в который входят датчики замыкания (контакта) и как минимум один фотоприемник, согласно настоящему изобретению снабжена, по крайней мере одним, беспроводным дистанционным пультом для ее управлением, центральный модуль управления объектом выполнен с функцией ретрансляции поступающих с персонального компьютера команд другим объектам системы и с функцией ретрансляции на персональный компьютер данных с датчиков, расположенных на других объектах системы.
В качестве датчиков внешней обстановки система содержит датчики замыкания и, как минимум, один фотоприемник.
Указанные признаки являются существенными и взаимосвязанными с образованием совокупности признаков, достаточной для получения требуемого технического результата.
Сущность предлагаемого изобретения поясняется следующими чертежами:
на фиг.1 представлена блок схема звуковой обучающе-игровой системы с компьютерным управлением; на фиг.2 - схема информационного обмена между ПК и движущимися объектами.
Согласно настоящего изобретения обучающе-игровая система с компьютерным управлением включает в себя по крайней мере один персональный компьютер, имеющий базовый модуль приемопередатчика с антенной, соединенный с компьютером, пульт управления системой в виде клавиатуры и мыши, один или несколько дистанционных пультов для управления системой с использованием цифрового и/или аналогового радиоканалов и/или инфракрасного канала.
Система включает в себя по крайней мере один объект, выполненный подвижным и включающий модуль для обеспечения обмена информацией объекта с компьютером, другими объектами, входящими в систему, и дистанционными пультами, антенну, центральный модуль управления объектом, выполненный с функцией адресации полученных сигналов исполнительным узлам объекта и соединенный с динамиком, моторами, излучателями, датчиками внешней обстановки и фотоприемниками через соответствующие согласующие устройства.
Система снабжена, по крайней мере одним, беспроводным дистанционным пультом для ее управления, центральный модуль управления объектом выполнен с функцией ретрансляции поступающих с персонального компьютера команд другим объектам системы, и с функцией ретрансляции на персональный компьютер данных с датчиков, расположенных на других объектах системы.
В качестве датчиков внешней обстановки система содержит датчики замыкания и фотоприемники.
Центральный модуль управления объектом представляет собой микропроцессорное устройство, содержащее подпрограммы, обеспечивающее функции высокоуровневого управления объектом, организацию связи с компьютером, дистанционными пультами и другими объектами.
Он осуществляет прием и дешифрацию сообщений и команд, поступающих с приемопередающего устройства, пересылку подтверждений на принятые сообщения, генерацию команд исполнительным устройствам, передачу данных с датчиков, повторную передачу адресных сообщений при их неприеме адресатом, временную синхронизацию передачи данных, ретрансляцию команд для обеспечения надежной связи с удаленными от компьютера объектами.
В центральном модуле управления объектом содержатся также подпрограммы, определяющие логику поведения объекта при тех или иных воздействиях окружающей среды, поступающих в модуль через датчики внешней обстановки. Таким образом, центральный модуль управления объектом реализует простейшие функции “искусственного интеллекта”, позволяющие объекту “принимать решения” без участия компьютера.
Для увеличения расстояния, на которое движущиеся объекты могут удаляться от соединенного с ПК приемопередающего устройства, в системе предусмотрен режим ретрансляции команд, передаваемых от ПК объекту другими объектами, входящими в систему. При переходе в данный режим производится и ретрансляция данных, поступающих с датчиков внешней обстановки.
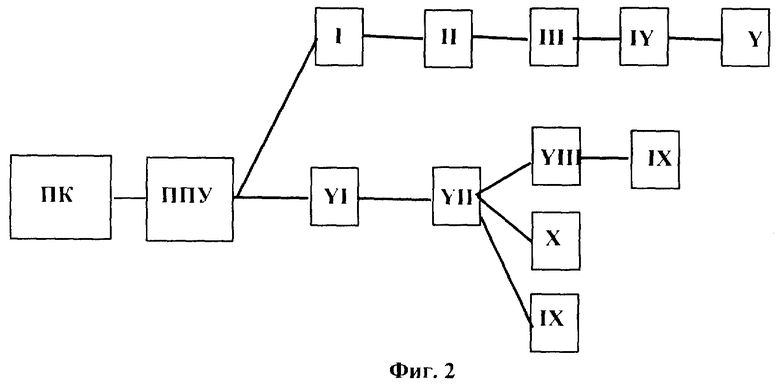
Использование ретрансляции команд и данных с датчиков иллюстрируется фиг.2, на которой приведен один из возможный режимов информационного обмена между ПК и движущимися объектами. Данная схема не является единственно возможной, однако наглядно иллюстрирует функционирование объектов при ретрансляции команд и данных сдатчиков.
На схеме (фиг.2) весь информационный обмен между ПК и движущимися объектами (они обозначены цифрами I, II, III, IY, Y, YI,...XI) производится через подключенное к ПК приемопередающее устройство (ППУ). При этом:
- объект, обозначенный на схеме цифрой I, обменивается данными непосредственно с ППУ и одновременно обеспечивает ретрансляцию команд и данных с датчиков для объектов, отмеченных на схеме цифрами II, III, IY и Y;
- объект, обозначенный на схеме цифрой II, обеспечивает ретрансляцию команд и данных с датчиков для объектов, отмеченных на схеме цифрами III, IY и Y;
- объект, обозначенный на схеме цифрой III, обеспечивает ретрансляцию команд и данных с датчиков для объектов, отмеченных на схеме цифрами IY и Y;
- объект, обозначенный на схеме цифрой IY, обеспечивает ретрансляцию команд и данных с датчиков для объекта, отмеченного на схеме цифрой Y;
- объект, обозначенный на схеме цифрой YI, обменивается данными непосредственно с ППУ и одновременно обеспечивает ретрансляцию команд и данных с датчиков для объектов, отмеченных на схеме цифрами YII-XI;
- объект, обозначенный на схеме цифрой YII, обеспечивает ретрансляцию команд и данных с датчиков для объектов, отмеченных на схеме цифрами YIII-XI;
- объект, обозначенный на схеме цифрой YIII, обеспечивает ретрансляцию команд и данных с датчиков для объекта, отмеченного на схеме цифрой IX;
Использование линейных схем ретрансляции данных между объектами обеспечивает возможность максимального удалений одного из объектов от ПК (объект, отмеченный на схеме цифрой Y).
Схема ретрансляции определяется непосредственно в процессе интерактивного управления объектами и может оператором гибко настраиваться, в зависимости от взаимного расположения объектов.
Сообщение о необходимости перевода системы в режим ретрансляции передается оператору, управляющему системой, автоматически, при утере связи ППУ с одним из управляемых объектов.
Система на фиг.1 включает в себя объединенные в локальную сеть IBM совместимые персональные компьютеры (ПК) 1 с установленным на них Windows 95 (или выше) и специализированным программным обеспечением. В системе может быть как один, так несколько ПК 1 (объединенных в локальную сеть). В первом случае к ПК 1 подключается модуль приемопередатчика 2 информации. В сетевом (многокомпьютерном) использовании системы при осуществлении обмена цифровой информацией используется только один приемопередатчик, а остальные (они выделены на схеме серым цветом) используются только для обмена с объектами аналоговой информацией. При использовании системы для разработки пользовательских программ на ПК 1 должен быть установлен Word, Excel или Access (97/2000).
Дистанционные пульты 3 (один или несколько) являются органами управления для ПК 1 и объектов.
Каждый из объектов оснащен модулем 4 для обеспечения обмена информацией объекта с ПК 1, дистанционными пультами 3 и с другими объектами.
Каждый из объектов оснащен центральным модулем 5 управления объектом.
Входящие в объекты исполнительные элементы с соответствующими согласующими устройствами отмечены на схеме цифрой 6, а датчики с соответствующими согласующими устройствами - цифрой 7.
Изображенные на схеме по фиг.1 модули конструктивно могут размещаться на отдельных платах могут как размещаться на нескольких платах, так и быть помещены на одной монтажной плате.
Звуковая обучающе-игровая система с компьютерным управлением функционирует следующим образом.
Функционирует система под управлением программного обеспечения (ПО), инсталлированного на ПК 1.
Весь обмен информацией между ПК и объектами производится через базовые модули приемопередатчиков 2, обеспечивающие связь ПК с модулями, отмеченными на схеме цифрами 3 и 4.
Передача с ПК на объекты команд исполнительным элементам через базовые модули приемопередатчиков 2 производится следующим образом.
Команды с ПК 1 передаются на модуль приемопередатчика 2, где они преобразуются в формат, соответствующий используемому каналу обмена информацией, и передаются на модуль 4 обмена информацией требуемого объекта. В модуле 4 обмена информацией сигнал фильтруется, декодируется, перекодируется во внутренний формат обмена данными объекта и транслируются на центральный модуль 5 управления объектом. После этого модуль 5 высылает на ПК подтверждение о приеме команды. Если за установленный промежуток времени такое подтверждение на ПК не поступило, то команда передается вторично. Эта процедура производится автоматически и обеспечивает режим гарантированной доставки команд на объекты. Центральный модуль 5 управления объектом транслирует команды на модуль 6, в котором располагаются все входящие в систему исполнительные элементы и соответствующие им согласующие устройства.
Передача с дистанционного пульта на объекты команд исполнительным элементам производится следующим образом.
Команды с дистанционного пульта 3 передаются на модуль обмена 4, где сигнал фильтруется, декодируется, перекодируется во внутренний формат обмена данными объекта, и транслируются на центральный модуль 5 управления объектом.
Передача на ПК данных с датчиков, располагающихся на объектах, производится следующим образом.
Команды с датчиков через соответствующие согласующие устройства 7 передаются на центральный модуль управления объектом 5, с которого они поступают на модуль обмена информацией объекта 4. С модуля обмена информацией объекта данные передаются на модуль приемопередатчика 2, где они фильтруются, преобразуются в формат, соответствующий используемому каналу обмена информацией, и передаются на ПК 1. После этого модуль 2 высылает на объект подтверждение о приеме данных с датчиков. Если за установленный промежуток времени такое подтверждение на объект не поступило, то данные с датчиков передаются вторично. Эта процедура производится автоматически и обеспечивает режим гарантированной доставки данных с датчиков на ПК.
Передача на ПК команд с дистанционных пультов производится следующим образом.
Команды с дистанционных пультов передаются на модуль приемопередатчика 2, где они фильтруются, преобразуются в формат, соответствующий используемому каналу обмена информацией, и передаются на ПК 1.
В системе предусмотрен и режим ретрансляции посылаемых с ПК и/или дистанционных пультов команд объектами, входящими в систему. Это означает, что в случае, когда объект, которому адресована посылаемая команда, находится вне зоны приема данных, то они могут быть переданы на объект путем их ретрансляции иным объектом, входящим в систему. Аналогично путем промежуточной ретрансляции могут быть переданы на ПК данные сдатчиков.
При этом для игровой системы ПК выполнен с программным обеспечением, реализующим функции выработки управляющих сигналов для исполнительных модулей объекта и передачи этих сигналов по полудуплексному каналу объекту для выполнения им действий в соответствии с управляющими сигналами.
Для обучающей системы ПК оснащен программным обеспечением, предназначенным для написания соответствующих прикладных программ выдачи управляющих сигналов на исполнительные модули объекта, передачи этих сигналов по полудуплексному каналу радиосвязи подвижному объекту для выполнения им действий в соответствии с управляющими сигналами и получения ответных сигналов об ошибках для корректировки соответствующих частей прикладных программ.
Таким образом, пользователь, используя возможности программного обеспечения ПК, пишет прикладную программу на выполнение конкретных действий объектом и направляет указанным ранее путем управляющий сигнал на исполнение этих действий объектам. Если программа написана корректно, то данные действия выполняются с отсылкой ответных сигналов о выполненных действиях. Если в написании программы допущена ошибка, то объекты не производят запрограммированных манипуляций. В этом случае пользователь корректирует программу. Указанные особенности системы позволяют в игровом аспекте формировать навыки по написанию программ на языке программирования высокого уровня.
Изобретение промышленно применимо, так как реализовано на базе известных блоков и узлов, оснащаемых соответствующим программным обеспечением и соответствующей настройкой для обеспечения возможности передачи и приема сигналов в соответствии с общим для всех компонент системы протоколом.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ РОБОТОМ И СПОСОБ УПРАВЛЕНИЯ | 2007 |
|
RU2361726C2 |
| МОДУЛЬ УПРАВЛЕНИЯ ПОЛИГОННЫМ ОБОРУДОВАНИЕМ | 2017 |
|
RU2670395C1 |
| АВТОМОБИЛЬНЫЙ ПРОТИВОУГОННЫЙ КОМПЛЕКС С ОПРЕДЕЛЕНИЕМ ГЕОГРАФИЧЕСКИХ КООРДИНАТ | 2006 |
|
RU2333853C2 |
| СИСТЕМА ОХРАННОЙ СИГНАЛИЗАЦИИ С ВОЗМОЖНОСТЬЮ БЕСПРОВОДНОГО ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СРЕДСТВАМИ ОБНАРУЖЕНИЯ | 2015 |
|
RU2614565C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ РОБОТИЗИРОВАННЫМ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2014 |
|
RU2557085C1 |
| СПУТНИКОВАЯ ОХРАННО-ПОИСКОВАЯ СИСТЕМА | 2013 |
|
RU2528090C1 |
| РАДИОКАНАЛЬНАЯ СИСТЕМА ОХРАННО-ПОЖАРНОЙ СИГНАЛИЗАЦИИ | 2009 |
|
RU2399095C1 |
| ПОРТАТИВНАЯ ШИРОКОДИАПАЗОННАЯ РАДИОСТАНЦИЯ | 2023 |
|
RU2804517C1 |
| Измерительно-вычислительный комплекс для определения качественных и количественных характеристик нефти и нефтепродуктов | 2019 |
|
RU2723773C1 |
| СИСТЕМА ОХРАНЫ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ | 2013 |
|
RU2536429C1 |
Изобретение относится к игровым системам с управляемыми от ПК подвижными устройствами. Технический результат заключается в расширении функциональных возможностей системы для реализации игровых аспектов, приближенных к реально действующим моделям поведения. Игровая система включает персональный компьютер с базовым модулем приемопередатчика, по крайней мере один объект с модулем для обеспечения обмена информацией между объектом и персональным компьютером, с центральным модулем управления объектом с функцией адресации полученных сигналов исполнительным узлам объекта, и снабженный исполнительными элементами и датчиком. Система имеет беспроводный дистанционный пульт для управления, центральный модуль управления объектом выполнен с функцией ретрансляции поступающих с персонального компьютера команд другим объктам системы и с функцией ретрансляции на персональный компьютер данных с датчиков, расположенных на других объектах системы. 2 ил.

Игровая система с компьютерным управлением, включающая по крайней мере один персональный компьютер, имеющий базовый модуль приемопередатчика, соединенный с персональным компьютером, по крайней мере один объект, включающий модуль для обеспечения обмена информацией между объектом и персональным компьютером, центральный модуль управления объектом, выполненный с функцией адресации полученных сигналов исполнительным узлам объекта, снабженный соответствующими согласующими устройствами набор исполнительных элементов, включающий в себя динамик, моторы и излучатели, снабженный соответствующими согласующими устройствами набор датчиков, предназначенный для передачи данных на центральный модуль управления объектом, отличающаяся тем, что система снабжена по крайней мере одним беспроводным дистанционным пультом, предназначенным для передачи команд на базовый модуль приемопередатчика, центральный модуль управления объектом выполнен с функцией ретрансляции поступающих с персонального компьютера команд другим объектам системы и с функцией ретрансляции на персональный компьютер данных с датчиков, расположенных на других объектах системы, а модуль для обеспечения обмена информацией между объектом и персональным компьютером предназначен также для трансляции информации на центральный модуль управления объектом.
| WO 9910065 А1, 04.03.1999 | |||
| НАСТОЛЬНАЯ ИГРА | 1993 |
|
RU2097087C1 |
| СПОСОБ БЕСПРОВОДНОЙ ПЕРЕДАЧИ И ПРИЕМА КОДОВОЙ ИНФОРМАЦИИ НА РАССТОЯНИИ (ВАРИАНТЫ) И ПОРТАТИВНОЕ УСТРОЙСТВО ДЛЯ БЕСПРОВОДНОЙ ПЕРЕДАЧИ КОДОВОЙ ИНФОРМАЦИИ НА РАССТОЯНИИ | 1998 |
|
RU2144264C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ И ИДЕНТИФИКАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2013785C1 |
| СПОСОБ ПОЛУЧЕНИЯ ПЛЕНКООБРАЗОВАТЕЛЯ | 1999 |
|
RU2161629C2 |

