Изобретение относится к радиотехническим устройствам управления роботизированным транспортным средством (РТС), например, перемещающимся в трубопроводе и имеющим манипуляторы, смонтированные на тележках, и может быть использовано для телеинспекции внутренней поверхности трубопровода, туннеля метро, подвальных помещений (подземных гаражей) и т.п.
Известно устройство управления роботизированным транспортным средством, входящее в состав газопроводной автоматизированной инспекционной системы, содержащее широкополосный приемопередатчик оператора, оснащенный всенаправленной антенной и пультом управления, широкополосный приемопередатчик роботизированного транспортного средства, оснащенный всенаправленной антенной и исполнительными элементами, причем широкополосные приемопередатчики соответственно соединены с пультом управления и исполнительными элементами шиной интерфейса типа TCP/IP, например стандарта 802.11b. (US, №6697710).
В этом техническом решении средство перемещения выполнено в виде самоходного поезда, собранного из отдельных модулей, цилиндрообразной формы и связанных между собой шарнирно, приводы ходовых механизмов каждого из модулей выполнены из магнитов и электромагнитных катушек, камеры и светильники установлены на торце крайних модулей. Устройство управления работает на частоте 2,4 гГц, имеет на приемопередатчиках по одной антенне с круговой диаграммой направленности.
Преимуществами этой системы являются: возможность поворота робота и его перемещения в изгибах трубы; возможность управления роботом и регистрации данных оператором снаружи трубопровода при передвижении робота внутри трубы, большая протяженность телеинспекции, не ограниченная длиной кабеля.
Ограничением этого технического решения являются: небольшие диаметры от 150 мм до 220 мм инспектируемых трубопроводов из-за применения электромагнитного привода перемещения посредством отдельных модулей. По сути, стенка трубопровода является корпусом устройства управления - своеобразным волноводом, не вызывающим переотражений и интерференции радиоволн, поэтому возможно использование всенаправленной антенны. Технические возможности такой конфигурации позволяют управлять РТС на расстояниях до 500 м. При увеличении дальности, а также при движении РТС происходит увеличение количества ошибок в канале управления, а иногда и временные замирания сигнала. Известное устройство не может использоваться в трубопроводах больших диаметров, а также в туннелях и подвальных помещениях из-за возникающих в них переотражений радиоволн.
Известен мобильный робот, содержащий размещенные в корпусе устройства для перемещения робота, блок обнаружения препятствия, блок определения текущего местоположения робота и блок наблюдения за пространством перед роботом, соединенные посредством соответствующих информационных каналов с блоком управления, источник питания, соединенный первыми выводами с соответствующими выводами блока обнаружения препятствия, блока определения текущего местоположения робота и блока наблюдения за пространством перед роботом, подключенного входом к выходу по меньшей мере одной камеры наблюдения, установленной на корпусе устройства для перемещения робота. Робот имеет перемещающееся средство с размещенными на нем станцией мобильной связи, выполненной с возможностью доступа в Интернет, и пультом дистанционного управления, выполненным в виде по меньшей мере одного персонального компьютера, соединенного информационным каналом со станцией мобильной связи. Устройство для перемещения робота выполнено в виде самодвижущейся тележки, которая кинематически связана с перемещающимся средством, на осях ведущих колес самодвижущейся тележки размещены приводные элементы двигателей постоянного тока, которые выводами связаны со вторыми выводами источника питания, а управляющими входами - с выходами блока управления, на дисках ведомых колес самодвижущейся тележки установлены фотоимпульсные датчики, соединенные выходами с входами блока определения пройденного роботом расстояния, и акселерометры, подключенные выходами к входам блока измерения ускорения при движении робота, блок обнаружения препятствия снабжен установленными на корпусе самодвижущейся тележки по меньшей мере одним передатчиком ультразвукового сигнала и по меньшей мере одним приемником ультразвукового сигнала. Блок определения пройденного роботом расстояния и блок измерения ускорения при движении робота размещены на корпусе самодвижущейся тележки и связаны своими выводами с третьими выводами источника питания, а блок управления дополнительными информационными каналами соединен с блоком определения пройденного роботом расстояния, блоком измерения ускорения при движении робота, станцией мобильной связи и по меньшей мере одним персональным компьютером, причем источник питания четвертыми выводами соединен с соответствующими выводами станции мобильной связи и по меньшей мере одного персонального компьютера (RU, №2274543).
В описании к этому изобретению оговаривается, что этот робот может использоваться для диагностики трубопроводов, скрытых полостей, подземных коммуникаций при наличии неагрессивной среды.
Преимуществом этого устройства является возможность управления роботом с удаленного расстояния посредством сети Интернет, поскольку известный мобильный робот представляет собой самодвижущуюся тележку с прицепом, на котором имеется пульт дистанционного управления в виде ПК (ноутбука) с подсоединенным к нему сотовым телефоном (станция мобильной связи), имеющим доступ в Интернет. Компьютер, через который происходит управление за несколько сотен или тысяч километров, имеет тоже доступ в Интернет при помощи сотового телефона.
Однако применение такого робота для инспекции трубопровода нецелесообразно, т.к. при перемещении робота внутри трубы стенка трубопровода является экранирующей и установить устойчивую связь мобильной станции (сотового телефона) по сети Интернет при нахождении робота внутри трубы практически невозможно.
Известно устройство управления роботизированным транспортным средством, входящее в состав робототехнической системы инспекции трубопровода, содержащее узкополосный приемопередатчик оператора, оснащенный всенаправленной антенной и пультом управления со средствами отображения, узкополосный приемопередатчик роботизированного транспортного средства, оснащенный всенаправленной антенной и исполнительными элементами (RU, U1, №133896).
В этом устройстве используется передача и прием сигналов по узкополосному каналу связи.
Преимуществом этого устройства является возможность обеспечения устойчивой радиосвязи для трубопроводов больших диаметров.
Однако при телеинспекции протяженных ограниченных сред, таких как шахты, тоннели, коллекторы, подземные помещения и расположенные в них коммуникации, возникают проблемы поддерживания сохранения устойчивой радиосвязи из-за интерференционных искажений радиосигналов.
Известно устройство управления роботизированным транспортным средством, входящее в состав робота в виде тележки и содержащее узкополосный приемопередатчик оператора, оснащенный антенной и пультом управления со средствами отображения, узкополосный приемопередатчик роботизированного транспортного средства, оснащенный антенной и исполнительными элементами, котроллеры, которые соответственно служат для управления приемниками и передатчиками узкополосного приемопередатчика оператора и узкополосного приемопередатчика роботизированного транспортного средства. (US №5736821).
В этом устройстве узкополосные приемопередатчики оператора и роботизированного транспортного средства оснащены двумя антеннами линейной поляризации: одной антенной - горизонтальной для передачи команд управления и телеметрии, а другой - вертикальной для передачи сигналов изображений. Кроме того, используются средства для поддержания горизонтального и вертикального положения антенн при крене тележки. Для того чтобы уменьшить искажения сигналов, связанные с интерференцией радиоволны, предложено использовать частоты меньшие, чем частота среза волновода - стенки корпуса трубы, например для диаметра трубы 10 см, меньшие 1,758 ГГц, при этом боковые патрубки отводов газового трубопровода, с диаметром меньшим 10 см, не оказывают влияния на устойчивость радиопередачи и радиоприема.
Однако специалистам понятно, что при увеличении диаметра основного трубопровода или при телеинспекции замкнутых пространств сложной формы ввиду переотражений радиосигнала все равно возникают интерференционные искажения. Кроме того, использование двух антенн для раздельного приема команд телеуправления и потокового видео усложняет конструкцию при применении узкополосных приемопередатчиков.
Наиболее близким является устройство управления роботизированным транспортным средством, содержащее узкополосный приемопередатчик оператора, оснащенный антенной и пультом управления со средствами отображения, узкополосный приемопередатчик роботизированного транспортного средства, оснащенный антенной и исполнительными элементами, широкополосный приемопередатчик оператора и широкополосный приемопередатчик роботизированного транспортного средства, каждый из которых оснащен антенной, контроллеры, которые выполнены обеспечивающими подключение узкополосных и широкополосных приемопередатчиков оператора и роботизированного транспортного средства, соответственно один контроллер соединен шиной обмена данными с пультом управления со средствами отображения, а другой - с исполнительными элементами (RU, №2210491).
В этом устройстве узкополосные приемопередатчики служат только для передачи команд, а широкополосные приемопередатчики - для передачи исключительно видеоизображения, а не команд, поэтому известное устройство не позволяет компенсировать интерференционные искажения протяженных ограниченных сред, таких как: внутренней поверхности разветвленного трубопровода с подключенным оборудованием, туннеля метро, подвальных помещений.
Решаемая изобретением задача - улучшение технико-эксплуатационных характеристик при телеинспекции в протяженных ограниченных средах.
Технический результат, который получен при выполнении изобретения, - повышение надежности устройства за счет уменьшения влияния интерференционных искажений сигнала и улучшения достоверности передачи и приема команд телеуправления, телеметрии и потокового видео.
Для решения поставленной задачи с достижением указанного технического результата в известном устройстве управления роботизированным транспортным средством, содержащим узкополосный приемопередатчик оператора, оснащенный антенной и пультом управления со средствами отображения, узкополосный приемопередатчик роботизированного транспортного средства, оснащенный антенной и исполнительными элементами, широкополосный приемопередатчик оператора и широкополосный приемопередатчик роботизированного транспортного средства, каждый из которых оснащен антенной, контроллеры, которые выполнены обеспечивающими подключение шинами узкополосных и широкополосных приемопередатчиков оператора и роботизированного транспортного средства, соответственно один контроллер соединен шиной обмена данными с пультом управления со средствами отображения, а другой - с исполнительными элементами, согласно изобретению антенны узкополосного приемопередатчика оператора и узкополосного приемопередатчика роботизированного транспортного средства выполнены всенаправленными, каждый широкополосный приемопередатчик оператора и широкополосный приемопередатчик роботизированного транспортного средства оснащен двумя узконаправленными антеннами и снабжен сумматором/разветвителем, вход/выход широкополосного приемопередатчика соединен с двумя узконаправленными антеннами через сумматор/разветвитель, причем ширина α диаграммы направленности узконаправленной антенны - α≤180°, а расстояние L между узконаправленными антеннами - L>α.
Возможны дополнительные варианты выполнения устройства, в которых целесообразно, чтобы:
- каждый из контроллеров был соединен с узкополосными приемопередатчиками шиной последовательного интерфейса RS232, или RS422, или RS485, или LON, или KAN;
- каждый из контроллеров соединен с широкополосными приемопередатчиками шиной интерфейса типа TCP/IP - Ethernet, или IEEE 802.11, или Wireless Ethernet, или SLIP, или Token Ring, или ATM, или MPLS.
Указанные преимущества изобретения, а также его особенности поясняются с помощью вариантов реализации со ссылками на прилагаемые чертежи.
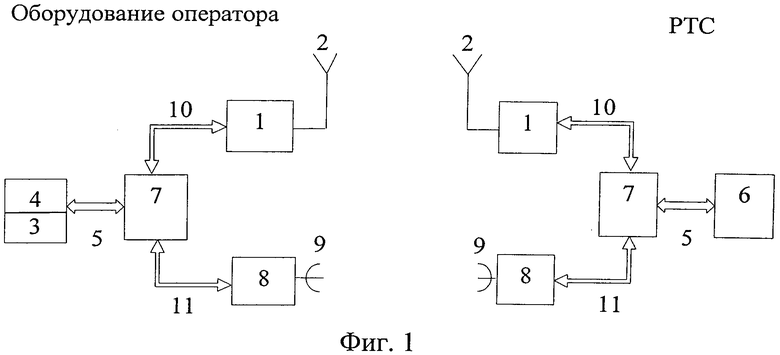
Фиг. 1 изображает обобщенную функциональную схему устройства;
Фиг. 2 - то же, что фиг. 1, при использовании в широкополосных приемопередатчиках двух узконаправленных антенн;
Фиг. 3 - блок-схему алгоритма работы контроллера, в режиме передачи;
Фиг. 4 - то же, что фиг. 3, в режиме приема.
Устройство управления роботизированным транспортным средством (фиг. 1) содержит узкополосный приемопередатчик 1 оператора, оснащенный антенной 2 и пультом 3 управления со средствами 4 отображения (соединенные между собой известным образом, например, как в RU, №13389, по шине 5 обмена данными интерфейса RS-485 или как в US, №5736821) и узкополосный приемопередатчик 1 роботизированного транспортного средства (РТС), оснащенный антенной 2 и исполнительными элементами 6. Контроллеры 7 соответственно служат для управления приемниками и передатчиками узкополосного приемопередатчика 1 оператора и узкополосного приемопередатчика 1 роботизированного транспортного средства. Узкополосные приемопередатчики 1 и антенны 2 для оператора и для роботизированного транспортного средства выполнены идентичными.
Антенны 2 узкополосного приемопередатчика 1 оператора и узкополосного приемопередатчика 2 РТС выполнены всенаправленными (с круговой диаграммой направленности). Устройство имеет широкополосный приемопередатчик 8 оператора и широкополосный приемопередатчик 8 РТС. Каждый из широкополосных приемопередатчиков 8 оснащен по меньшей мере одной узконаправленной антенной 9 и контроллером 7, выполненными идентичными. Контроллеры 7 выполнены обеспечивающими подключение узкополосных приемопередатчиков 1 и широкополосных приемопередатчиков 8. Соответственно один контроллер 7 соединен шиной 5 обмена данными с пультом 3 управления со средствами 4 отображения, а другой контроллер 7 - с исполнительными элементами 6. Каждый из контроллеров соединен шиной 10 последовательного интерфейса типа RS232 с узкополосными приемопередатчиками 1, а шиной 11 интерфейса типа TCP/IP - с широкополосными приемопередатчиками 7.
Для уменьшения влияния интерференционных искажений сигнала ширина α диаграммы направленности узконаправленной антенны 9 выбрана удовлетворяющей: α≤180°.
Шиной 10 последовательного интерфейса может быть RS232, или RS422, или RS485, или LON, или KAN.
Шиной 11 интерфейса типа TCP/IP может быть Ethernet, или IEEE 802.11, или Wireless Ethernet, или SLIP, или Token Ring, или ATM, или MPLS.
В устройстве (фиг. 2) каждый широкополосный приемопередатчик 7 снабжен двумя узконаправленными антеннами 9 и сумматором/разветвителем 12. Вход/выход широкополосного приемопередатчика 8 соединен с двумя узконаправленными антеннами 9 через сумматор/разветвитель 12.
Для исключения взаимного влияния узконаправленных антенн 9 расстояние L между узконаправленными антеннами 9 выбрано: L>α, где α - ширина диаграммы направленности узконаправленной антенны 9.
Работает устройство управления роботизированным транспортным средством (фиг.1) следующим образом.
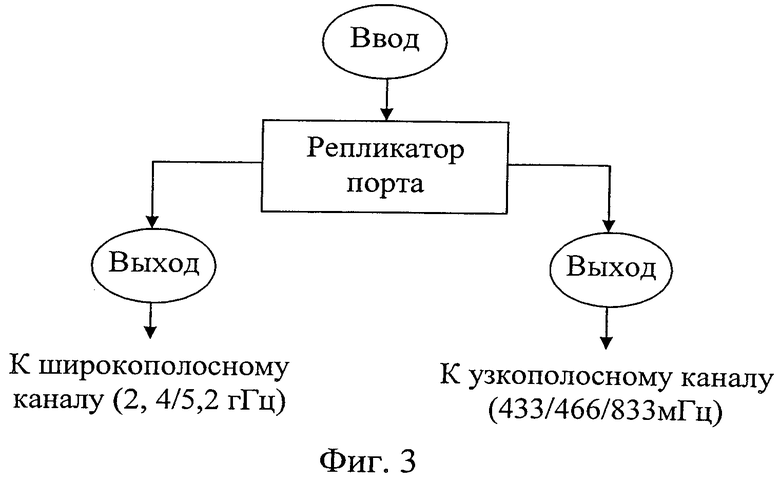
Команда с пульта 3 управления (манипулятор «мышь», джойстик, трекбол, клавиатура и т.п.) со средствами 4 отображения (монитор, сенсорный экран) реорганизуется цифровым преобразователем пульта 3 в стандартный протокол и в виде кодовой посылки в формате, позволяющем определить наличие ошибки, поступает по шине 5 обмена данными в устройство ввода контроллера 7. Контроллер 7 при передаче команд функционирует в режиме репликатора порта (фиг. 3). При этом (аналогично US, №5736821) контроллер 7 подключает передатчики узкополосного приемопередатчика 1 и широкополосного приемопередатчика 8 к шине 10 последовательного интерфейса типа RS232 с несущими частотами 433, или 466, или 833 мГц командных сигналов и к шине 11 интерфейса типа TCP/IP с несущими частотами 2, 4 или 5,2 гГц.
Как при передаче, так и приеме радиосигналов шиной 10 последовательного интерфейса может быть RS232, или RS422, или RS485, или LON, или KAN и др., а шиной 11 интерфейса типа TCP/IP может быть Ethernet, или IEEE 802.11, или Wireless Ethernet, или SLIP, или Token Ring, или ATM, или MPLS и др.
Радиочастотные сигналы на упомянутых частотах излучаются в направлении РТС всенаправленной антенной 2 (с круговой диаграммой направленности) узкополосного приемопередатчика 1 и узконаправленной антенной 9 (α≤180°) широкополосного приемопередатчика 8 оборудования оператора. Поскольку несущие частоты узкополосного и широкополосного каналов значительно различаются между собой, то всенаправленная антенна 2 узкополосного приемопередатчика 1 РТС принимает сигналы узкополосного приемопередатчика 1 оборудования оператора, а узконаправленная антенна 9 широкополосного приемопередатчика 8 РТС - широкополосного приемопередатчика 8 оборудования оператора. Информация о направленной команде от АЦП приемника узкополосного приемопередатчика 1 и от АЦП приемника широкополосного приемопередатчика 8 по шине 10 последовательного интерфейса типа RS232 и по шине 11 интерфейса типа TCP/IP поступает соответственно на контроллер 7.
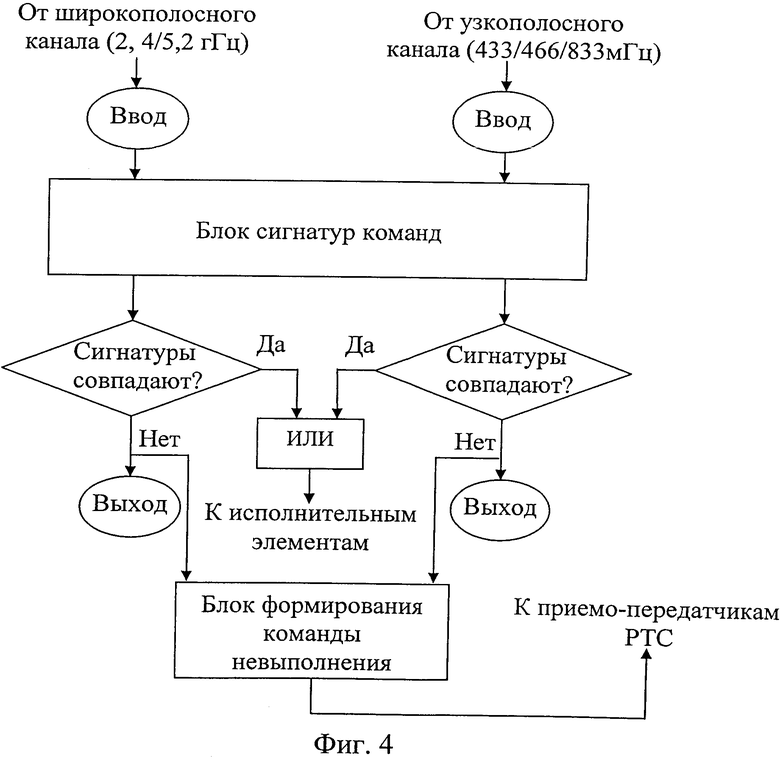
В режиме приема контроллер 7 (фиг. 1) работает по следующему алгоритму (фиг. 4).
Сигналы команд по шинам 10 и 11 поступают в блок сигнатур команд, где они сравниваются с шаблонами сигнатур. В случае отсутствия ошибок и совпадения принятой команды с шаблоном, команда считается истинной. Блоки принятия решений «Сигнатуры совпадают?» имеют два выхода. В случае принятия решения «Нет» осуществляется выход из алгоритма, сигналы не поступают к исполнительным элементам 6, но направляются в блок формирования команды невыполнения, которая от контроллера 7 РТС по шинам 10 и 11 соответственно передается к ЦАП передатчиков узкополосного приемопередатчика 1 и широкополосного приемопередатчика 8 РТС. Узкополосный приемопередатчик 1 и широкополосный приемопередатчик 8 РТС направляет сообщение о невыполнении оборудованию оператора (фиг. 1).
В случае наличия информации «Да» (фиг. 3) на выходе одного из блоков принятия решения и «Нет» - на выходе другого блока принятия решения, хотя бы один из сигналов «Да» поступает на вход блока, выполняющего функцию «ИЛИ», с выхода которого действующая команда направляется к исполнительным элементам. В случае наличия информации «Да» на выходах обоих блоков принятия решения контроллер 7 реализует функцию типа оператора «исключительное ИЛИ». С целью повышения быстродействия и увеличения надежности управления приоритетными являются данные, поступившие от широкополосного канала.
Данные алгоритмы (фиг. 3, 4) реализованы на контроллере sbRIO с помощью программного обеспечения LabVIEW.
Исполнительными элементам 6 (фиг. 1) являются приводы колес, приводы телекамер, осветительное оборудование и т.п. После отработки команды, поступившей шине 5 обмена данными, аналогично выше описанному для оборудования оператора в режиме передачи, цифровыми преобразователями исполнительных элементов 6 формируется команда о выполнении, которая реорганизуется в стандартный протокол и в виде кодовой посылки по шине 5 обмена данными поступает в контроллер 7 РТС. В режиме передачи контроллер 7 РТС функционирует в соответствии с алгоритмом (фиг. 3). По шинам 10, 11 сигнал о выполненной команде соответственно поступает на передатчики узкополосного приемопередатчика 1 и широкополосного приемопередатчика 8 РТС и передается оборудованию оператора всенаправленной антенной 2 и узконаправленной антенной 9 РТС.
При приеме радиосигналов о выполнении команд узкополосным приемопередатчиком 1 и широкополосным приемопередатчиком 8 оборудования оператора контроллер 7 работает точно в соответствии с алгоритмом фиг. 3, а «исполнительными элементами» в этой блок-схеме являются пульт 3 управления со средствами 4 отображения. Аналогично обрабатывается команда невыполнения. При поступлении команды о невыполнении исполнительным элементом 6 заданного действия от контроллера 7 РТС, в отличие от других известных устройств оператор имеет возможность использовать, например, команды: «вперед», «назад», «поворот» и т.п., пока не будет достигнута устойчивая радиосвязь хотя бы по одному из каналов.
Таким образом, поскольку используется практически функционально идентичное оборудование оператора и РТС для управления, в которых контроллеры 7 работают по одинаковым алгоритмам, а также за счет использования двух каналов передачи данных - узкополосного и широкополосного, в которых каждый из каналов имеет значительно разнящиеся частоты, и так как применяются узкополосные приемопередатчики 1 с всенаправленными антеннами 2 и широкополосные приемопередатчики 8 с узконаправленными антенными 9 как для оборудования оператора, так и для РТС, то удается повысить надежность устройства за счет уменьшения влияния интерференционных искажений сигнала в различных протяженных средах, являющихся своеобразным корпусом устройства (трубопроводы больших диаметров, шахты, тоннели, коллекторы, подземные помещения и расположенные в них коммуникации), и улучшить достоверность передачи и приема команд телеуправления, телеметрии и потокового видео.
Как показали исследования, повысить надежность устройства и улучшить достоверность передачи и приема можно, если каждый широкополосный приемопередатчик 7 снабжен двумя узконаправленными антеннами 9 и сумматором/разветвителем 12 (фиг. 2). Вход/выход широкополосного приемопередатчика 8 соединен с двумя узконаправленными антеннами 9 через сумматор/разветвитель 12. При использовании двух узконаправленных антенн 9 расстояние L между узконаправленными антеннами 9 может быть выбрано: L>α, где α - ширина диаграммы направленности узконаправленной антенны 9, при этом исключается взаимное влияние этих антенн.
Устройство (фиг. 2) работает точно так же, как устройство управления роботизированным транспортным средством (фиг. 1). Пассивные сумматоры и разветвители (за исключением направленных ответвителей НО) являются взаимными устройствами многополюсниками, т.е. сумматор может использоваться в качестве разветвителя (сплитера), и наоборот. В режиме передачи радиосигнала оборудованием оператора сумматор/разветвитель 12 является разветвителем и выход передатчика широкополосного приемопередатчика 8 подсоединен синфазно к двум узконаправленным антеннам 9, которые излучают высокочастотный сигнал от оборудования оператора в направлении к РТС. А в режиме приема радиосигнала сумматор/разветвитель 12 является сумматором и вход приемника широкополосного приемопередатчика 8 подсоединен к двум узконаправленным антеннам 9, которые принимают высокочастотный сигнал от РТС. Аналогично работает и сумматор/разветвитель 12 РТС.
В результате проведенных испытаний было получено, что использование узкополосного канала не уменьшает количества ошибок в широкополосном канале, а уменьшает последствия от эффекта замирания в нем сигнала. Соответственно, повышается надежность устройства управления. А количество ошибок уменьшается с помощью использования широкополосных приемопередатчиков 8 (например, многоантенных, с различной поляризацией и в различных диапазонах).
Кроме того, специалистам понятно, что для повышения надежности передачи и приема команд устройством в оборудовании оператора могут использоваться по меньшей мере два отдельных широкополосных приемопередатчика 8, каждый из которых имеет по две узконаправленные антенны 9, и два отдельных широкополосных приемопередатчика 8 для РТС с такими же антеннами, работающих на разных несущих частотах, например 2,4 ГГц и 5,2 ГГц.
Изобретение не исключает других технических усовершенствований, а объем патентных притязаний в целом представлен в независимом пункте формулы изобретения.
Наиболее успешно заявленное устройство управления роботизированным транспортным средством промышленно применимо для проведения телеинспекции подводных или подземных участков магистральных трубопроводов больших диаметров, а также шахт, тоннелей, коллекторов, подземных помещений с расположенными в них коммуникациями, и других протяженных объектов с ограниченным сложным поперечным сечением.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНАЯ АВТОНОМНАЯ РОБОТОТЕХНИЧЕСКАЯ ПЛАТФОРМА С БЛОЧНОЙ ИЗМЕНЯЕМОЙ СТРУКТУРОЙ | 2019 |
|
RU2704048C1 |
| Мультиагентная робототехническая система | 2017 |
|
RU2658684C1 |
| АВТОНОМНЫЙ РОБОТ ДЛЯ ВНУТРИТРУБНОЙ ДИАГНОСТИКИ | 2022 |
|
RU2796166C1 |
| МОБИЛЬНАЯ СТАНЦИЯ ВИДЕОМОНИТОРИНГА И СВЯЗИ | 2008 |
|
RU2398353C2 |
| КОМПЛЕКСНАЯ АППАРАТНАЯ СВЯЗИ ДЛЯ ТРАНСПОРТНОЙ СЕТИ ПОЛЕВОЙ СИСТЕМЫ СВЯЗИ | 2016 |
|
RU2629426C1 |
| СПОСОБ НАВИГАЦИИ В ПОМЕЩЕНИИ И РАДИОНАВИГАЦИОННЫЙ ДАТЧИК ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2023 |
|
RU2838877C1 |
| МОБИЛЬНЫЙ УЗЕЛ СПУТНИКОВОЙ СВЯЗИ | 2007 |
|
RU2342787C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ | 2020 |
|
RU2737684C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ ОБЪЕКТОВ ЗА ПРЕГРАДОЙ | 2016 |
|
RU2626460C1 |
| ПЕРЕНОСНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС ОГНЕВОЙ ПОДДЕРЖКИ И БОЕВОГО ОБЕСПЕЧЕНИЯ | 2019 |
|
RU2725942C1 |
Изобретение относится к технике связи и может использоваться в системах беспроводной связи. Технический результат состоит в повышении надежности работы устройства за счет уменьшения влияния интерференционных искажений. Для этого устройство содержит узкополосный приемопередатчик оператора, оснащенный антенной и пультом управления со средствами отображения, и узкополосный приемопередатчик роботизированного транспортного средства (РТС), оснащенный антенной и исполнительными элементами. Контроллеры служат для управления приемниками и передатчиками узкополосных приемопередатчиков оператора и РТС. Антенны узкополосных приемопередатчиков оператора и РТС выполнены всенаправленными. Введены широкополосные приемопередатчики оператора и РТС, каждый из которых оснащен по меньшей мере одной узконаправленной антенной. Контроллеры выполнены дополнительно обеспечивающими подключение узкополосньгх и широкополосных приемопередатчиков. 2 з.п. ф-лы, 4 ил.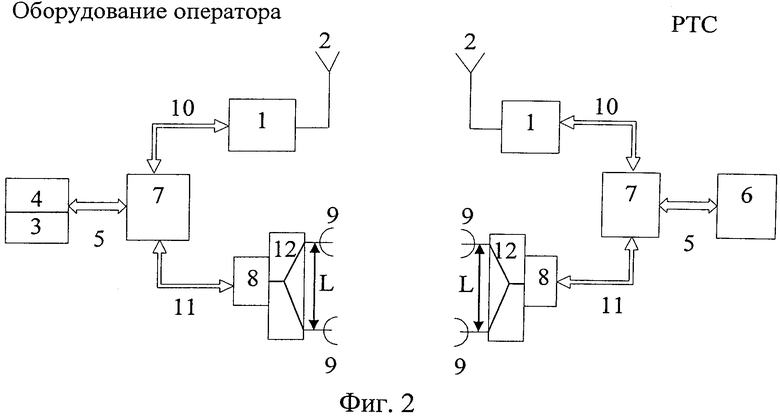
1. Устройство управления роботизированным транспортным средством, содержащее узкополосный приемопередатчик оператора, оснащенный антенной и пультом управления со средствами отображения, узкополосный приемопередатчик роботизированного транспортного средства, оснащенный антенной и исполнительными элементами, широкополосный приемопередатчик оператора и широкополосный приемопередатчик роботизированного транспортного средства, каждый из которых оснащен антенной, контроллеры, которые выполнены обеспечивающими подключение шинами узкополосных и широкополосных приемопередатчиков оператора и роботизированного транспортного средства, один контроллер соединен шиной обмена данными с пультом управления со средствами отображения, а другой - с исполнительными элементами, отличающееся тем, что антенны узкополосного приемопередатчика оператора и узкополосного приемопередатчика роботизированного транспортного средства выполнены всенаправленными, каждый широкополосный приемопередатчик оператора и широкополосный приемопередатчик роботизированного транспортного средства оснащен двумя узконаправленными антеннами и снабжен сумматором/разветвителем, вход/выход широкополосного приемопередатчика соединен с двумя узконаправленными антеннами через сумматор/разветвитель, причем ширина α диаграммы направленности узконаправленной антенны - α≤180°, а расстояние L между узконаправленными антеннами - L>α.
2. Устройство по п. 1, отличающееся тем, что каждый из контроллеров соединен с узкополосными приемопередатчиками шиной последовательного интерфейса RS232, или RS422, или RS485, или LON, или KAN.
3. Устройство по п. 1, отличающееся тем, что каждый из контроллеров соединен с широкополосными приемопередатчиками шиной интерфейса типа TCP/IP - Ethernet, или IEEE 802.11, или Wireless Ethernet, или SLIP, или Token Ring, или ATM, или MPLS.
| СИСТЕМА С МОБИЛЬНЫМ РОБОТОМ, ВЫПОЛНЕННАЯ С ИСПОЛЬЗОВАНИЕМ ВЫСОКОЧАСТОТНОГО МОДУЛЯ | 2001 |
|
RU2210491C2 |
| TCP/IP https://ru.wikipedia.org/wiki/TCP/IP | |||
| Крутильно-намоточный аппарат | 1922 |
|
SU232A1 |
| ТРАНСПОРТНЫЙ РОБОТ | 2010 |
|
RU2424891C1 |
| ТРАНСПОРТНЫЙ РОБОТ С БОРТОВОЙ ЛОКАЦИОННОЙ СИСТЕМОЙ (ВАРИАНТЫ) | 2010 |
|
RU2454314C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
| Гасительная камера | 1958 |
|
SU115109A2 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |

