Изобретение относится к области контроля взаимного положения деталей агрегата во время его работы, в частности к области контроля параллельности и перекоса геометрических осей валов зубчатых колес, например редукторов.
Известны способы контроля параллельности и перекоса геометрических валов зубчатых колес, например редукторов, с использованием токовихревых датчиков.
Однако известные способы контроля позволяют только правильно определить взаимное положение осей валов зубчатых колес в статическом состоянии, т. е. при сборке редуктора, в результате запуска редуктора в работу происходит значительное искажение достигнутого при сборке сопряжения взаимодействующих зубьев зубчатых колес под влиянием температурных факторов, силовых факторов, износа подшипников, возникаюодих во время работы.
Целью данного изобретения является обеспечение правильного сопряжения взаимодействующих зубьев зубчатых колес редуктора во время работы редуктора путем повышения точности контроля параллельности и перекоса геометрических осей валов зубчатых колес. Эта цель достигается тем, что на шейках каждого вала устанавливают токовихревые датчики в двух взаимно перпендикулярных плоскостях, вращают валы и при установившемся режиме работы зубчатых колес регистрируют координаты положения шейки каждого вала, затем прекращают вращение валов и по показаниям датчиков определяют смещение геометрических осей валов в горизонтальной и вертикальной плоскостях, после чего корректируют положение вала на величину этого смещения.
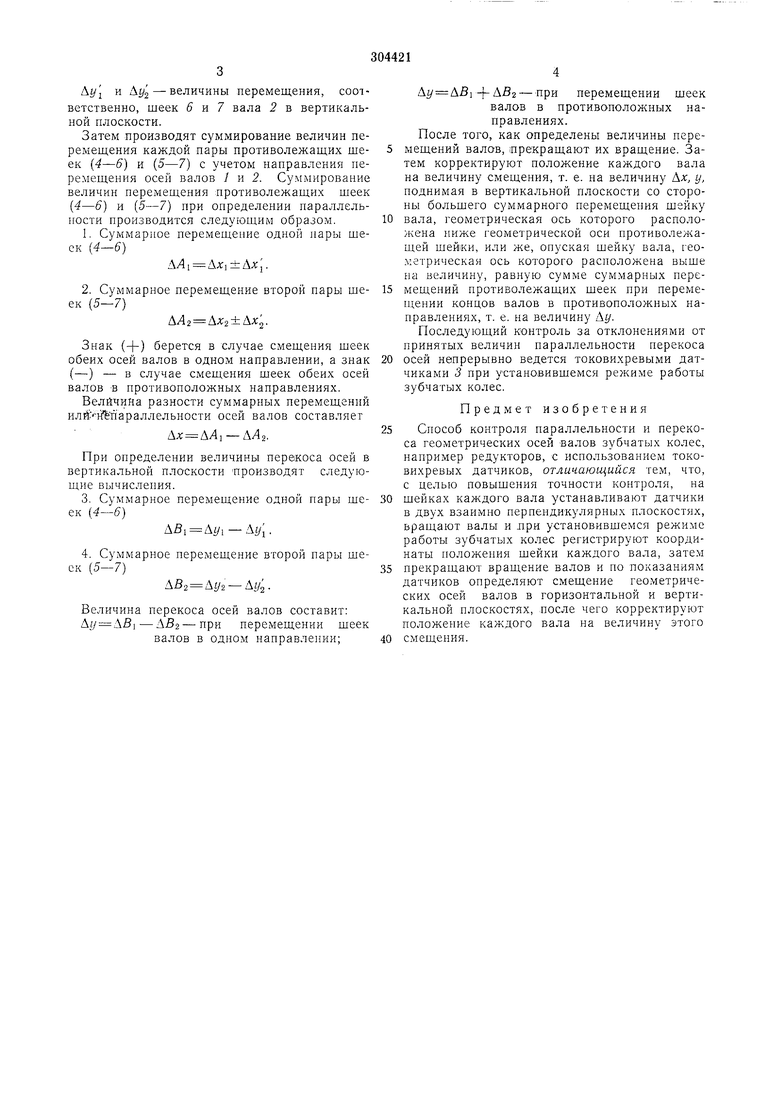
На фиг. 1 показана схема положения осей валов после запуска редуктора в работу, когда имеет место смещение валов, фиксируемых токовихревыми датчиками в двух плоскостях; на фиг. 2 - поперечное сечение одного из валов с устаноБле 1Ными на нем токовихревыми датчиками в двух плоскостях.
Для контроля положения валов / и 2 токовихревые датчики 3 устанавливают на шейках валов, после чего валы вращают. Величины перемещения шеек валов показаны на фиг. 1.
Дх и - величины перемещения, соответственно, шеек 4 и 5 вала / в горизонтальной плоскости;
Дг/1 и Ai/2 - величины перемещения, соответственно, шеек 4 т 5 вала 1 в вертикальной плоскости;
At/j и At/2 - величины перемещения, соответственно, шеек 6 и 7 вала 2 в вертикальной плоскости.
Затем производят суммирование величин перемещения каждой пары противолежащих щеек (4-6) и (5-7) с учетом направления перемещения осей валов 1 и 2. Суммирование величин перемещения противолежащих шеек (4-6) и (5-7) при определении параллельности производится следующим образом.
1.Суммарное перемещение одной пары шеек (4-6)
АЛ1 Дл:,±Дл;.
2.Суммарное перемещение второй пары шеек (5-7)
АЛ2 А 2±А- 2Знак (-|-) берется в случае смещения шеек обеих осей валов в одном направлении, а знак (-) - в случае смещения шеек обеих осей валов в противоположных направлениях.
Величина разности суммарных перемещений илй -11Ьпараллельности осей валов составляет
-АЛа.
При определении величины перекоса осей в вертикальной плоскости производят следующие вычисления.
3.Суммарное перемещение одной пары шеек (4-6)
- Аг/;.
4.Суммарное перемещение второй пары шеек (5-7)
AS2 Ar/2 -Аг/2.
Величина перекоса осей валов составит: A// ABi - АВ2-при перемещении шеек ва.чов в одпом направлении;
Аг/ АБг+АВ2-при перемещении шеек валов в противоположных направлениях.
После того, как определены величины перемещений валов, прекращают их вращение. Затем корректируют положение каждого вала на величину смещения, т. е. на величину Ах, у, поднимая в вертикальной плоскости со стороны больщего суммарного перемещения щейку вала, геометрическая ось которого расположена ниже геометрической оси противолежащей шейки, или же, опуская шейку вала, геометрическая ось которого расположена выше на величину, равную сумме суммарных перемещений противолежащих щеек при перемещении концов валов в противоположных направлениях, т. е. на величину Аг/.
Последующий контроль за отклонениями от принятых величин параллельности нерекоса осей непрерывно ведется токовихревыми датчиками 3 при установившемся режиме работы зубчатых колес.
Предмет изобретения
Способ контроля параллельности и перекоса геометрических осей валов зубчатых колес, например редукторов, с использованием токовихревых датчиков, отличающийся тем, что, с целью повыщения точности контроля, на
шейках каждого вала устанавливают датчики в двух взаимно перпендикулярных плоскостях, вращают валы и .при установившемся режиме работы зубчатых колес регистрируют координаты положепия шейки каждого вала, затем
прекращают вращение валов и по показаниям датчиков определяют смещение геометрических осей валов в горизонтальной и вертикальной плоскостях, после чего корректируют положение каждого вала на величину этого
смещения.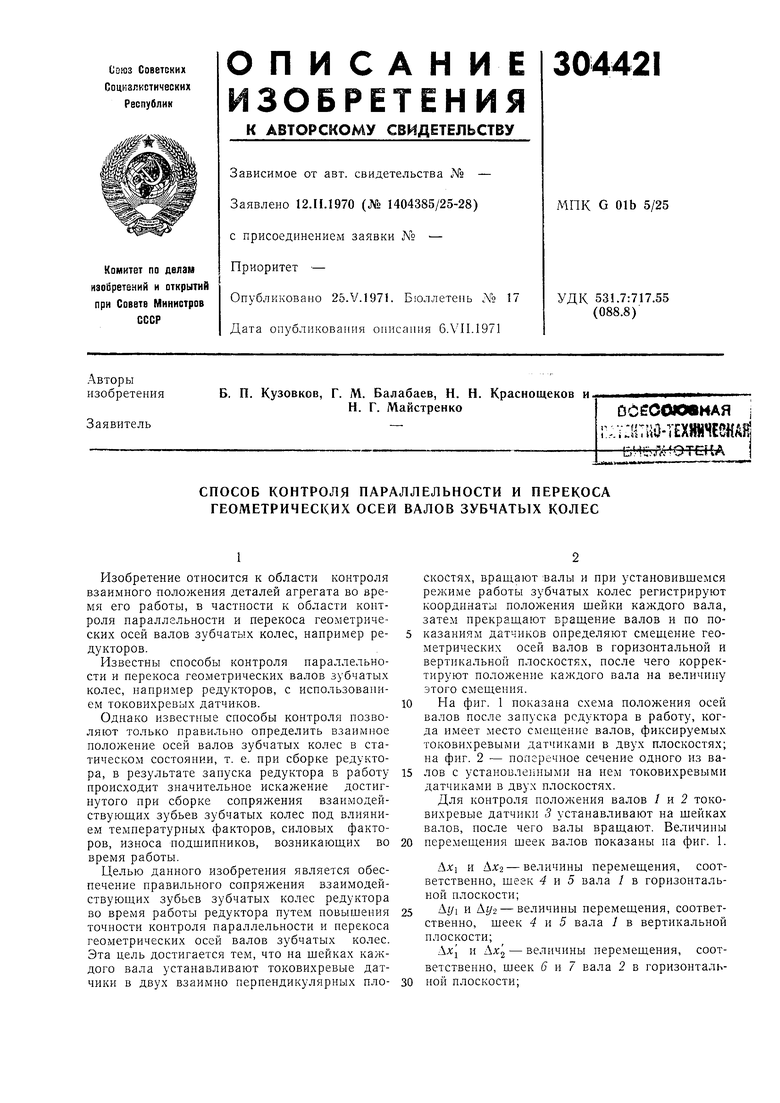
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ восстановления коленчатых валов | 1978 |
|
SU737147A1 |
| Устройство для проверки коленчатых валов | 1983 |
|
SU1128112A1 |
| ШТАМП ДЛЯ ИЗГОТОВЛЕНИЯ КОЛЕНЧАТЫХ ВАЛОВ | 1971 |
|
SU295598A1 |
| ПЕРЕНОСНЫЙ СТАНОК ДЛЯ ШЛИФОВАНИЯ ШЕЕК КОЛЕНЧАТЫХ ВАЛОВ | 1966 |
|
SU182548A1 |
| Прокатная клеть | 1980 |
|
SU984519A1 |
| Устройство для обрезки шеек семян луковичных | 1972 |
|
SU440134A1 |
| РЕВЕРСИВНОЕ УСТРОЙСТВО ДЛЯ ДВУХТАКТНОГО ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 1969 |
|
SU241813A1 |
| Станок для обработки шатунных шеек коленчатых валов | 1979 |
|
SU921712A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ И СБОРКИ/РАЗБОРКИ ВОЛНОВОЙ ГЕРМЕТИЧНОЙ ПЕРЕДАЧИ И УСТРОЙСТВО ДЛЯ ИХ ОСУЩЕСТВЛЕНИЯ АБРАМОВА В.А. | 2013 |
|
RU2566584C2 |
| Радиально-поршневой гидромотор многократного действия | 1979 |
|
SU866261A1 |
i,2
PU&. 2
