Известен способ определения пара-метров поверхностей на трехкоординатном измерительном устройстве, имеюще.м продольный, поперечный и .вертикальный суппорты, снабженные индивидуальными шкалами для отсчета их перемещений, и вращающийся контактный щун с индикатором для отсчета перемещения щупа.
Одна|Ко известный способ не позволяет о-пределять асферичность, координаты центра сферы и радиуса сферы у деталей, и.меющих поверхность в виде произвольного участка сферы.
Предлагаемый способ отличается от известного тем, что для определения асферичности координат центра сферы и радиуса сферы у деталей, имеющих поверхность в виде продольного участка сферы сначала, касаясь -контролируемой поверхности контактным щупом, поворачивая его относительно оси вращения и перемещая его в вертикальной плоскости с помощью вертикального суппорта, а деталь - в горизонтальной плоскости с помощью продольного и поперечного суппортов, добиваются такого положения детали, когда индикатор при перемещении вертикальното суппорта показывает максимальное значение и минимальный размах показаний при повороте контактного щупа вокруг оси вращения; затем с помощью Щкал продольного, поперечного и вертикального суппортов ф 1ксируют координаты центров окружностей, образованных пересечением контролируемой сферической поверхност с плоскостями, проходящими
через се центр, н по величине размаха показаний индикатора при повороте его вокруг оси вращения определяют некруглость этих окружностей, а радиус их определяют, измерив расстояние между на-конечником контактного
щуна и осью его вращения, измеренные параметры окружностей и характеризуют контролируемые параметры измеряемой сферической поверхности.
Описываемый способ отличается от известного также и тем, что для измерения расстояния между наконечником щупа и осью вращения производят измерение перемещения оси вращения щупа при повороте его на 180 и
с.мещении на заранее известную велнчину, по которому вычисляют с помощью известной формулы расстояние между наконечником щупа и осью вращения, характеризующее радиус контролируемой сферической поверхности.
Этот способ опрсделелпя параметров поBcpxiiiocTeii осуществ.чястся при полоиди трехксординатного пзмерптсльгюго устройства.
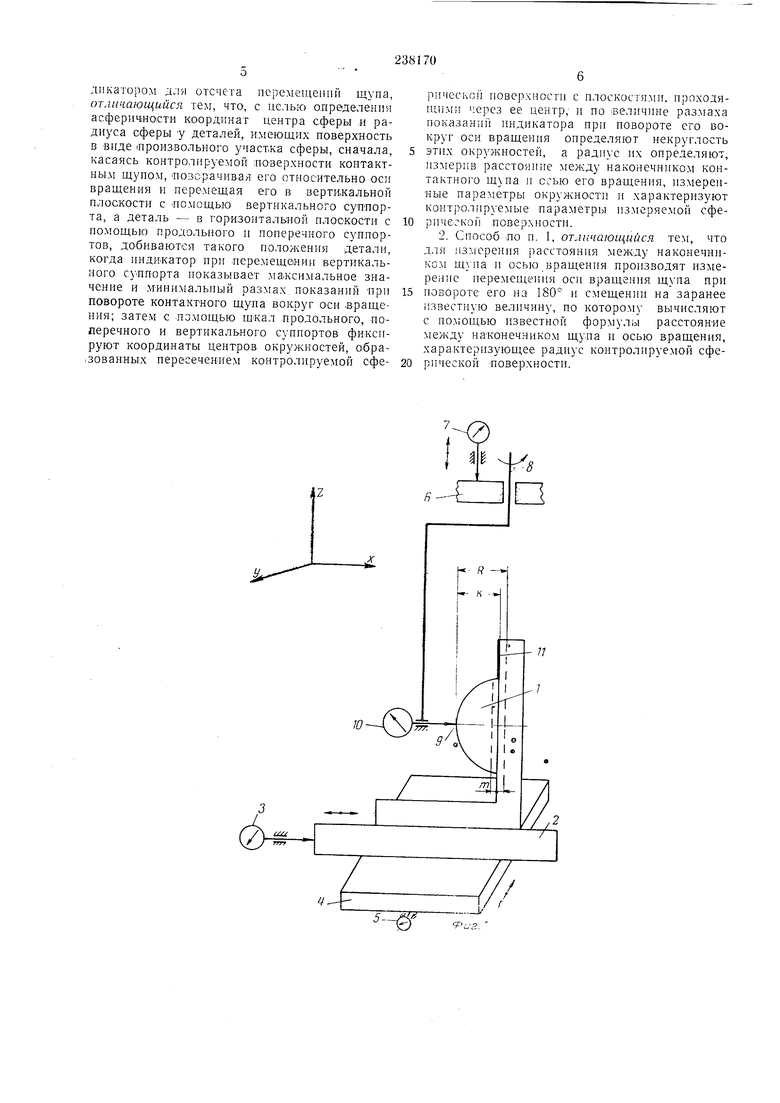
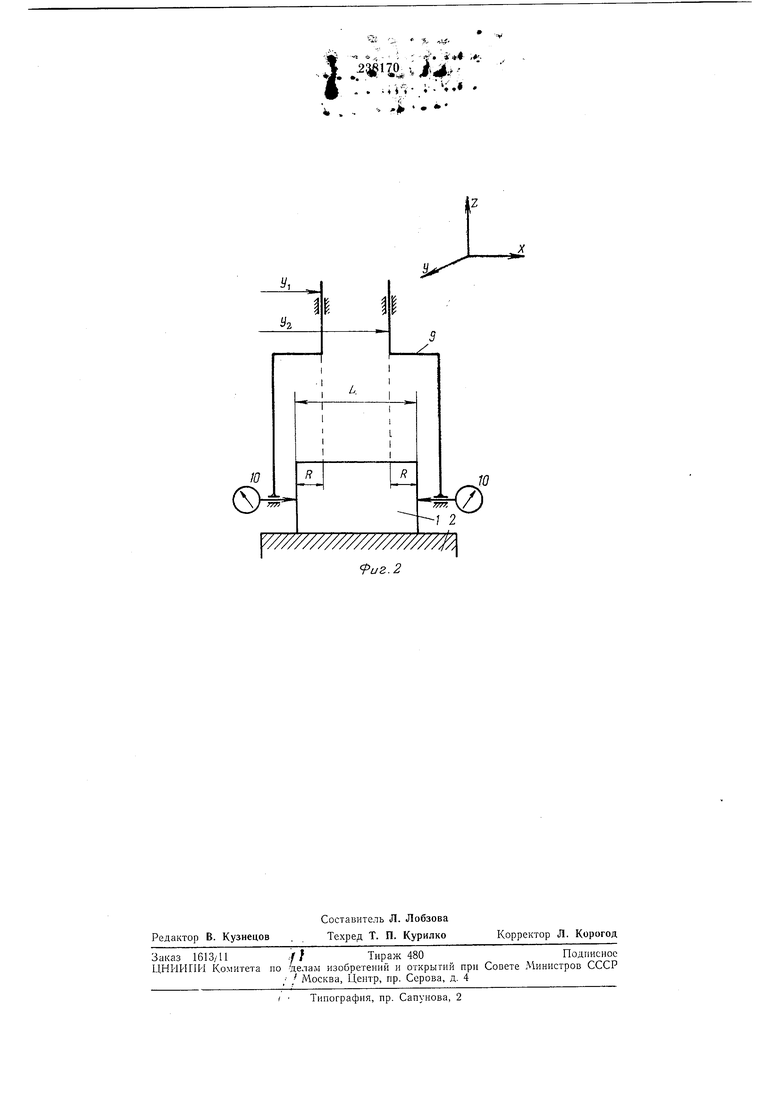
На фиг. 1 изображена п.ринциппальная схема измерительного устройства; на фиг. 2 - принципиальная схема определения расстояния между накоиечником контактного щупа н осью вращения.
Для измерительных работ с контролируемой деталью / трехкоординатное измерительнос устройство содержит иродольный суииорт 2 со шкалой 3 для отсчета атеремещений, поперечный суппорт 4 со щкалой 5 для отсчета перемещений, вертикальный суппорт 6 со щкалой 7 для отсчета иере.мещеинй н закрепленный на вертикальном суппорте щниидель 8 с KOHTaKTiHbiM щупом 9 и индикатором 10 для отсчета -перемещений ко.нтактного щупа. В качестве «иди-катора может быть использовал пневматический, электронный, механический или любой другой датчик перемещеиий.
Предлагаемый способ осуществляется на трехкоордииатном измерительном устройстве следующим образом.
На столе продольного суппорта 2 устанавливают измеряемую деталь /, которая соприкасается с KOHTaiKTiHbiM щупОМ 9. Поворачивая контактный щуп с иомощью щпинделя 8 и иеремещая его в вертикальной плоскости с помощью вертикального суппорта 6, а деталь - в горизонтальной плоскости С помощью продольного и поперечного суппортов, добиваются такого положения детали 7, когда инди-катор W ири перемещении вертикального суппорта 6 показывает ма-ксимальное зиачение п ц минимальный размах показаний нри повороте контактного щупа вокруг оси вращения 1лпипделя 8.
Это положение соответствует совпадению центра окружности, образоваиной пересечепием контролируемой сферической поверхности с плоскостью, проходящей через точку контакта щупа с контролируемой позер.хностью и перпендикулярной осн вращения щи миделя.,
С помощью щкал 3, 5 и 7 для отсчета перемещений суппорто-в ф;1ксируют координаты центра Oj этой 01кружности (Aj, Ali, Ki).
Для определения взаимного расположения центра Oj относительно какой-либо поверхиости детали измеряют коордниаты этой поверхности и по известным координатам NI, MI, Ki вычисляют их взаимное расположение. Так, например, расстояипе m 1между больщим торцом детали и центром 0 определяют следующим образом. Перед закреплением детали иа подстав-ке базовый торец 11 последней вставляют строго иерпендикулярио к направлению перемещения продольного суппорта 2 п параллельно перемещению вертикального супио;рта 6. После определения координат центра и иекруглости окружности, образованной пересечением контролируамОЙ сферической поверхности с плоскостью, ироходящей через точку контакта щупа с контролируемой поверхиостью и иериендикуляриой оси вращеИ1 я щиинделя 8, деталь снимают -с подставки. Подставку с помощью иродо,тьцого суппорта вводят в соарикосновение с коита ктным щупом, покачивают его и находят позицию, IB которой вылет наконечника относительно оси врац1,ения -минимальный. В этой иозидии щупа фиксируют положение N-2 продольного суппорта в момент, когда на индикаторе устанавливается значение п.
Вычисляют путь, пройдениый иродольиым суппортом, по формуле
.
Пскомую величину определяют по формуле
m , где / - радиус сферы.
По размаху показаний индикатора при повороте его вокруг оси щпииделя в пределах контролируемой поверхности определяют некруглость той же окружности, а расстояние между наконечником контактного щупа и осью его вращения равно радиусу окружности. Его оиределяют следующим образом.
Па столе продольного суипорта устанавливают образцовую деталь / со строго параллельными рабочими поверхностями, наиример, концевой мерой длины, чтобы ее рабочие поверхности были перпендикулярны направлению перемещения продольного суппорта. Затем измерительный наконечник -контактного щупа с помощью суппорта вводят в соприкосновение с одной из рабочих поверхностей образцовой детали, -поворачивая контактный щуп вокруг его оси, добиваются минимального вылета измерительного наконечника относительно осп вращения контактного щупа, а продольный суп-порт продолжают перемещать до тех пор, пока стрелка .индикатора контактного щупа не будет находиться против деления щкалы индикатора, соответствующего положению п, по-сле этого перемещение продольного суппорта прекращают, и в этой же плоскости фиксируют его «оордииату У;.
Поворачивая контактный щуп на 180° до касания проти-в-оположной рабочей поверхности образцовой детали и повторяя те же операаии, определяют координату У, второго положения продольного суппорта.
В дальнейшем, пользуясь несложными известными зависимостями и заранее зная расстояние /- -между рабочими поверхностями образцовой детали, определяют радиус проверяемой сферической поверхности по формуле
-(r,-ri) 2
Предмет изобретения
1. Способ определения пара-метров поверхностей на трехкоординатном измерительном устройстве, имеющем продольный, поперечный и вертикальный суппорты, снабженные индивидуальными шкалами для отсчета их перемещений, и вращающийся .контактный щуп с индикатором дли отсчета перемещений щупа, отличающийся тем, что, с целью определения асфернч,Ности координат центра сферы и радиуса сферы у деталей, имеющих поверхность в виде (Произвольного участка сферы, сначала, касаясь контролируемой :п0верхр1ости контактны.м щупом, позсрачивал его относительно оси вращения и перемещая его в вергш альной плоскости с ПОМОЩЬЮ вертикального суп-порта, а деталь - в горизоптальной плоскости с помощью продольного и поперечного суппортов, добиваются такого положения детали, когда индиКатор при перемещении вертикального суппорта показывает лга.ксимальное значение и минимальный размах, показаний при повороте контактного щупа вокруг осп .вращения; затем с помощью щкал продольного, поперечного и вертикального суппортов фиксируют координаты центров окружностей, обра.зованных пересечением контролируемой сферической иоверхности с плоскостями, проходящими через ее центр, и по величине размаха показаний индикатора прп повороте его вокруг оси вращения оиределяют некруглость этих окружностей, а радиус их определяют, измерив расстояние между наконечником контактного и осью его вращения, измеренные параметры окружности и характеризуют контролируемые параметры излюряемой сферической поверхности.
2. Способ ло п. 1, отличающийся тем, что для 1 змеренпя расстояния между наконечннком и осью вращения производят измерение иеремещепия оси вращения щупа прп
иоБОроте его на 180° и смещении на заранее известную величину, по которому вычисляют с но.;ощью известной формулы расстоян-ие между наконечником щупа и осью вращения, характеризующее радиус контролируемой сферической поверхности.
ii .
///////////////////zm
% -t-i X, - -е. ,.
...K . . .iv- ;--.«
к ,
.2
