Изобретение относится к сельскохозяйственному машиностроению, а именно к конструкции машин для скашивания хлебов в валок.
Известна жатка-накопитель [1] с мотовилом двойного действия, которое имеет чередующиеся ряды спиралеобразных планок левостороннего и правостороннего заходов. Мотовило работает совместно с транспортером-аккумулятором.
Недостатком данного устройства является то, что мотовило не может поднимать и скашивать в валки полеглый и поникший хлебостой и в процессе уборки формирует не прямолинейный валок, что затрудняет работу комбайна на подборе валков, снижает его производительность и создает условия для увеличения потерь.
За прототип взята валковая жатка [2], содержащая режущий аппарат, эксцентриковое мотовило, транспортер с грузонесущими пальцами и его привод, систему автоматического управления привода транспортера с исполнительным механизмом, редуктором и регулирующим органом.
Недостатком данной валковой жатки является то, что она в процессе работы формирует валки перпендикулярно к направлению движения жатвенного агрегата, но стебли в нем расположены вдоль направления движения агрегата, это приводит к провалам части стеблей валка в колеи прохода агрегата, поэтому эта часть валков плохо просыхает и увеличиваются потери зерна при подборе валков.
Цель изобретения - скашивание полеглых и поникших хлебов с повышением устойчивости к провисанию части валков над колеями жатвенного агрегата за счет укладывания валка на стерне параллелограммной формы с расположением стеблей в нем под углом к направлению движения агрегата.
Цель изобретения достигается тем, что платформа жатки установлена под углом к направлению движения агрегата и повернута по направлению часовой стрелки на величину угла разворота стеблей, уложенных в валок.
Проведя анализ технического решения на существенные отличия было отмечено, что ранее подобного технического решения с установкой платформы жатки под углом к направлению движения агрегата не было.
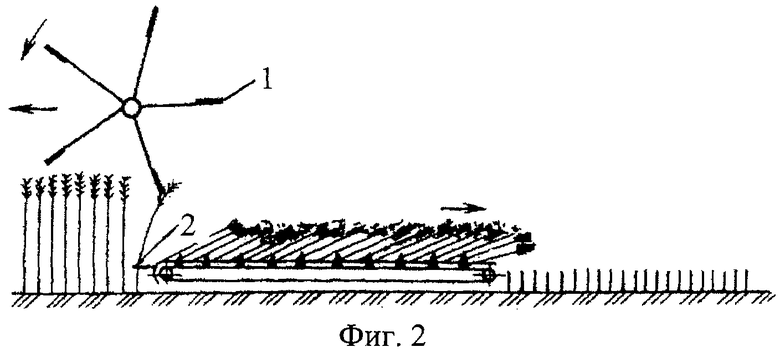
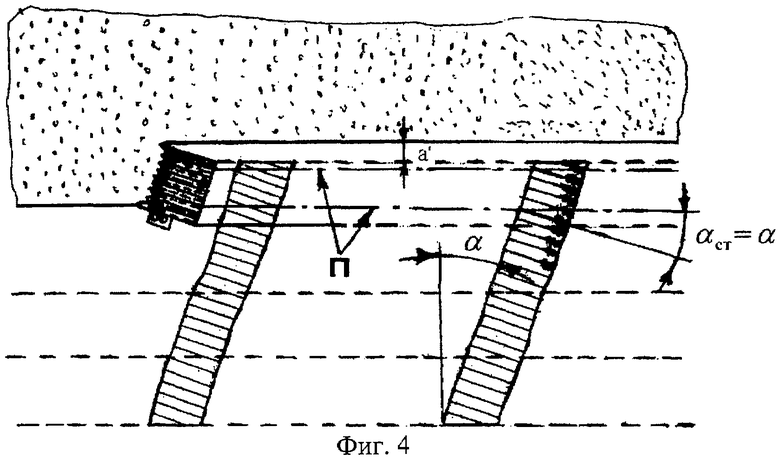
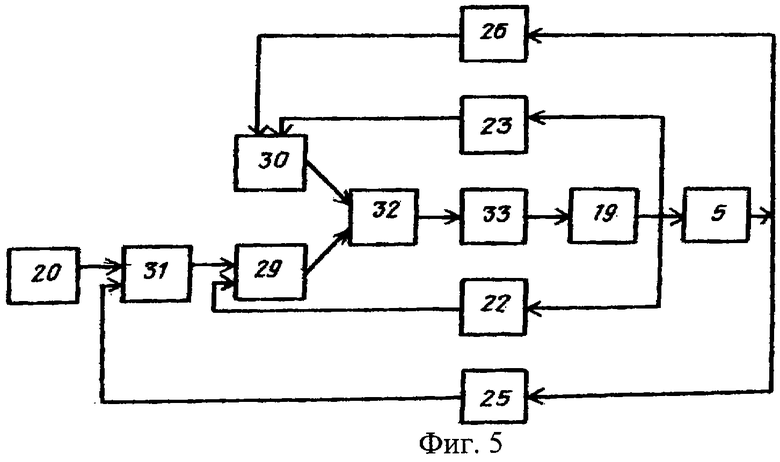
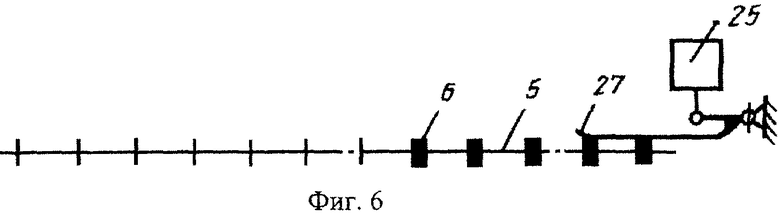
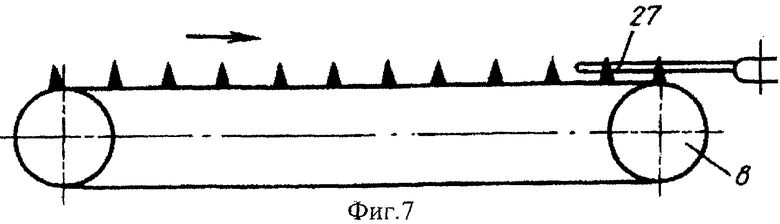
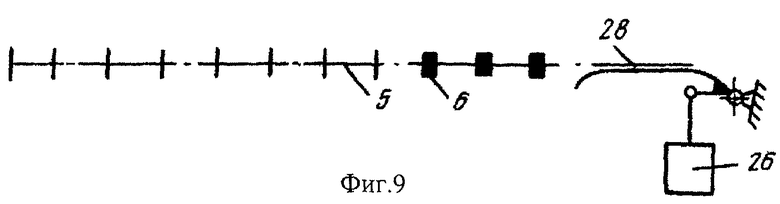
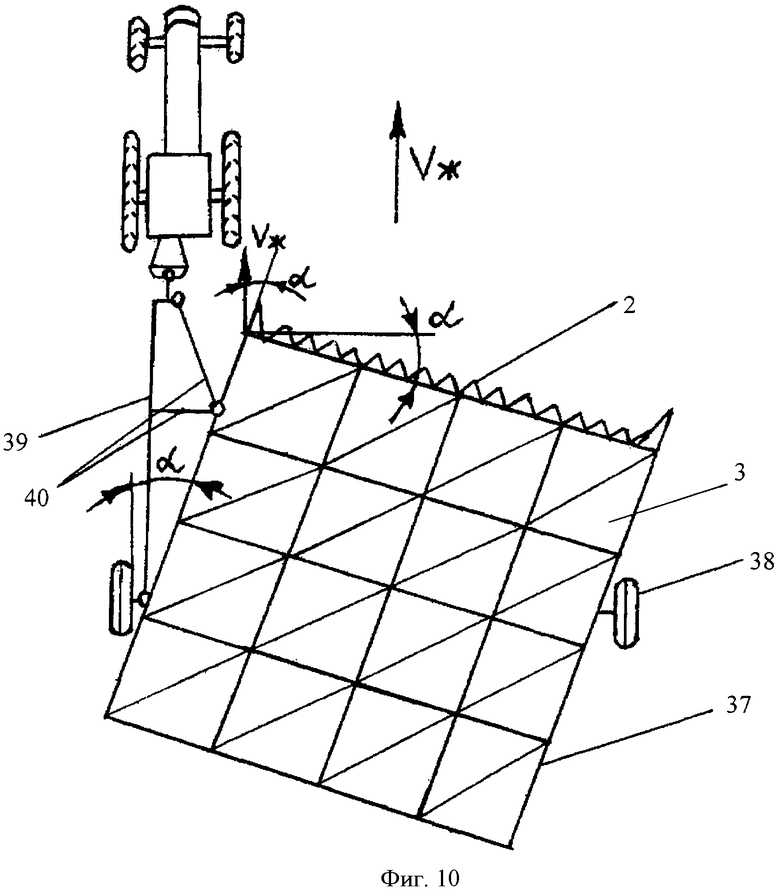
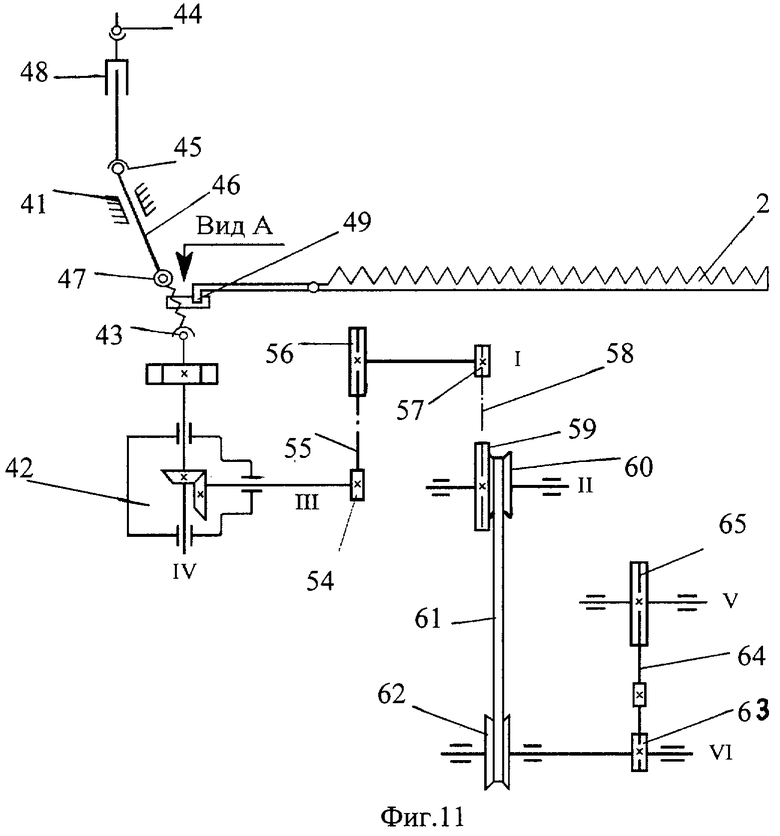
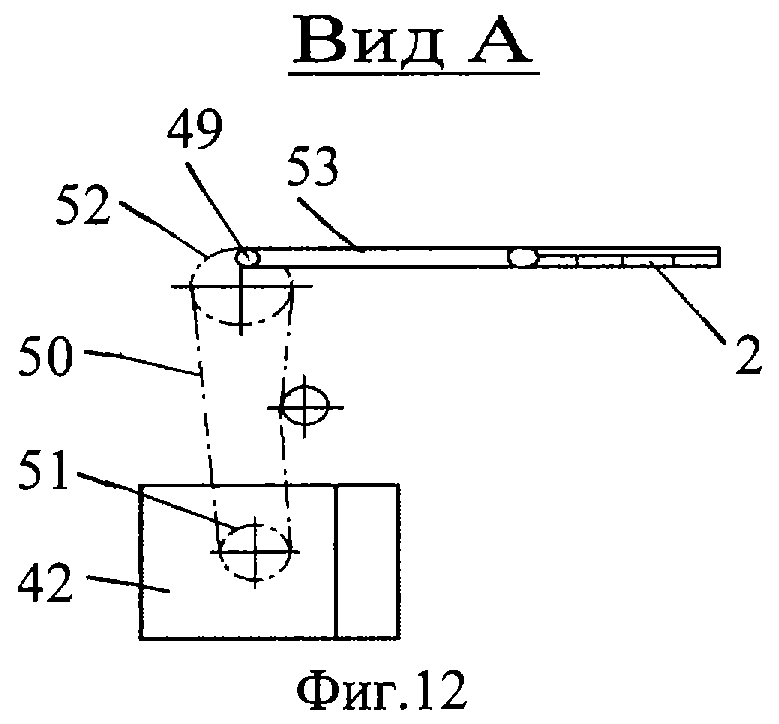
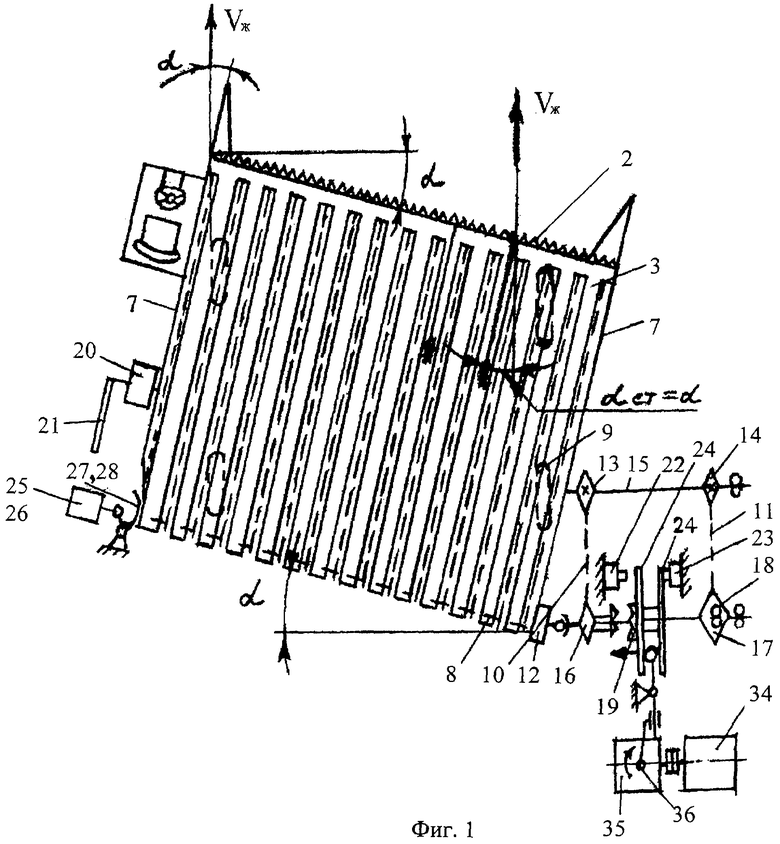
На фиг.1 показана самоходная валковая жатка, вид в плане; на фиг.2 - схема работы жатки при укладке хлебной массы на транспортер, вид сбоку; на фиг.3 - схема работы жатки при укладке хлебной массы в валок, вид сбоку; на фиг.4 - схема работы жатки на поле, вид в плане; на фиг.5 - функциональная схема системы автоматического управления приводом транспортера; на фиг.6 - датчик начального положения грузонесущих пальцев транспортера, вид сверху; на фиг.7 - датчик начального положения грузонесущих пальцев транспортера, вид сбоку; на фиг.8 - датчик конечного положения грузонесущих пальцев транспортера, вид сбоку; на фиг.9 - датчик конечного положения грузонесущих пальцев транспортера, вид сверху; на фиг.10 - схема рамы и сницы прицепной жатки; на фиг.11 - схема привода режущего аппарата и мотовила самоходной и прицепной жатки, вид в плане; на фиг.12 - схема привода режущего аппарата самоходной и прицепной жатки, вид сбоку (вид А).
Самоходная валковая жатка включает в себя эксцентриковое мотовило 1, режущий аппарат 2 и установленную под углом α к направлению движения агрегата платформу 3 с настилом 4, под которым размещен транспортер 5 с пальцами 6, которые установлены на участке транспортера 5, меньшем половины длины последнего. Пальцы 6 через продольные пазы выступают над поверхностью платформы 3, причем крайние пазы выполнены непосредственно у боковин 7 жатки. Привод ведущего вала 8 транспортера 5 осуществляется от опорного колеса 9 жатки. Платформа 3 жатки фиксируется относительно опорных колес 9. Привод транспортера 5 состоит из двух цепных передач 10 и 11 и редуктора 12. Ведущие звездочки 13 и 14 закреплены жестко на оси 15 опорного колеса 9. Ведомая звездочка 16 свободно вращается на валу 8, а звездочка 17 закреплена на корпусе муфты свободного хода 18. Кроме того, звездочка 16 снабжена регулирующим органом 19, например, в виде храповой муфты. Привод транспортера 5 снабжен системой автоматического управления, имеющей датчик валка 20 со щупом 21, который установлен на раме с левой стороны по ходу движения жатки с возможностью перемещения. Датчики начального 22 и конечного 23 положения регулирующего органа 19 закреплены на раме жатки, выполнены в виде концевых выключателей и управляются упорами 24, которые закреплены на подвижной части регулирующего органа 19. Датчики начального 25 и конечного 26 положения грузонесущих пальцев 6 транспортера 5 закреплены на раме у кромки платформы 3. Щуп 27 датчика 25 начального положения грузонесущих пальцев 6 расположен над настилом 4. Щуп 28 датчика 26 конечного положения грузонесущих пальцев 6 расположен ниже настила 4. Щупы 27 и 28 установлены с возможностью перемещения вдоль платформы 3. Система автоматического управления снабжена блоками запрета по начальному 29 и конечному 30 положению регулирующего органа 19 и блоком запрета 31 по начальному положению грузонесущих пальцев 6.
В систему автоматического управления входят также усилитель 32 в виде катушек реле и исполнительный механизм 33 с реверсивным электродвигателем 34 и редуктором 35, выходной вал 36 которого посредством системы передач связан с подвижной частью регулирующего органа 19.
Валковая жатка в прицепном варианте имеет раму 37, опирающуюся на два опорных колеса 38, прицепную сницу 39, с промежуточными регулировочными тягами 40 (фиг.10). Разворот платформы 3 жатки фиксируется относительно прицепной сницы 39 жатки и ее опорных колес 38.
Сница имеет опору 41 для карданного вала и раздаточной раздаточной коробки 42 (фиг.11).
Привод режущего аппарата 2 самоходной жатки осуществляется от вала отбора мощности самоходного энергетического средства посредством карданного вала, имеющего три шарнира 43, 44 и 45 (фиг.11), трубчатый вал 46, опору 41, предохранительную муфту 47 и телескопический вал 48. Карданный вал вилкой шарнира 44 надевается на шлицевой хвостовик вала отбора мощности самоходного энергетического средства. Другим концом при помощи вилки шарнира 43 карданный вал соединяется с валом IV раздаточной коробки 42. Возвратно-поступательное движение ножу режущего аппарата 2 сообщает кривошипно-шатунный механизм 49, который приводится в движение через цепную передачу 50 от ведущей звездочки 51 (фиг.12), последняя закреплена на валу IV раздаточной коробки 42. Звездочка 51 передает вращение ведомой звездочке 52, которая закреплена на валу кривошипно-шатунного механизма 49. Посредством шатуна 53 эксцентрик кривошипно-шатунного механизма 49 связан с головкой ножа режущего аппарата 2 жатки.
Привод на эксцентриковое мотовило 1 самоходной жатки осуществляется следующим образом. Вращение от вала отбора мощности самоходного энергетического средства посредством карданного вала передается через вал III раздаточной коробки 42 на ведущую звездочку 54 (фиг.11), которая передает вращение посредством цепной передачи 55 на звездочку 56, закрепленную на промежуточном валу I. На этом же валу с противоположной стороны закреплена звездочка 57, передающая вращение цепной передачей 58 на звездочку 59, закрепленную на валу II ведущего шкива 60 вариатора. Последний посредством клиноременной передачи 61 передает вращение ведомому шкиву 62 вариатора. Звездочка 63, закрепленная на одном контрприводном валу VI с ведомым шкивом 62 вариатора, передает вращение посредством цепной передачи 64 на звездочку 65, закрепленную на трубчатом валу V эксцентрикового мотовила 1 жатки.
Рабочий процесс жатки состоит из двух режимов: режима накопления хлебной массы на платформе 3 в виде порции и режима разгрузки ее транспортером 5 на стерню с образованием непрерывного валка (фиг.2, 3 и 4).
Режим накопления хлебной массы на платформе жатки начинается при ее скашивании режущим аппаратом 2, мотовило 1 укладывает хлебную массу на переднюю часть настила 4. Но так как платформа жатки расположена под углом α к направлению движения агрегата, происходит разворот стеблей на угол αст относительно направления движения агрегата, т.е. на величину угла α установки опорных колес жатки относительно платформы жатки (фиг.1). Далее транспортер 5 грузонесущими пальцами 6 перемещает хлебную массу в противоположную сторону к направлению движения агрегата.
Режим накопления порции хлебной массы осуществляется в результате движения грузонесущих пальцев 6 со скоростью, меньшей скорости жатки. При накоплении порции привод на вал 8 осуществляется от опорного колеса 9 (или колеса 38 для прицепной жатки) через цепную передачу 11. При этом щуп 21 датчика 20 валка (фиг.1 и 5) скользит по полю, датчик 25 начального положения грузонесущих пальцев 6 транспортера 5 отклонен, а цепь блока запрета 31 разомкнута. Такое положение предотвращает включение исполнительного механизма 33 щупом 21 датчика валка 20 от случайной помехи (камень, пучок соломы и т.д.). На некотором расстоянии до начала полосы формирования валка (0,5-1,0 м) датчик 25 начального положения грузонесущих пальцев 6 транспортера 5 включается щупом 27 (фиг.1, 6 и 7), в результате чего замыкается цепь блока запрета 31 (фиг.5). При этом цепь датчика валка 20 подготовлена для включения исполнительного механизма 33 на разгрузку порции.
Режим разгрузки хлебной массы. Включение режима разгрузки хлебной массы осуществляется щупом 21 датчика валка 20, который находит на валок и включает датчик 20. Сигнал от датчика валка 20 через блоки запрета 31, 29 и усилитель 32 поступает на исполнительный механизм 33, который включает регулирующий орган 19. Последний выключает передачу 11 и включает передачу 10, обеспечивая этим переключение работы транспортера 5 с режима накопления на режим разгрузки. Одновременно регулирующий орган 19 отключает датчик 22 (фиг.1) начального положения регулирующего органа 19, обеспечивая размыкание цепи блока запрета 29 по начальному положению регулирующего органа 19, и включает датчик 23, замкнув цепь блока запрета 30 по конечному положению регулирующего органа 19. Этим обеспечивается отключение исполнительного механизма 33 после переключения транспортера 5. При разгрузке вращение от опорного колеса 9 (или колеса 38) на вал 8 передается через цепную передачу 10. При этом пальцы 6 транспортера движутся со скоростью, равной скорости жатки Vж. При разгрузке порция валка разгружается с платформы жатки на стерню в виде параллелограмма, повернутого на величину угла α - разворота валка на стерне. Положение стеблей в валке остается неизменным, они укладываются в валок на тот же угол разворота стеблей αст, который они имели на платформе жатки при режиме накопления, но изменяется положение стеблей в валке по отношению к колеям “П” колес жатки, они укладываются под выбранным углом разворота стеблей αст (фиг.4), опираясь своими концами на прямостоящую стерню рядом с колеями. Валки формируются в направлении, не перпендикулярном направлению движения жатвенного агрегата на величину угла разворота платформы α. Во время режима разгрузки порции вновь скашиваемая хлебная масса укладывается мотовилом 1 на переднюю часть платформы 3 и остается неподвижной до подхода пальцев 6. По окончании разгрузки пальцы 6 транспортера 5 уходят из-под щупа 28 (фиг.1, 8 и 9), и включается датчик 26. Сигнал от последнего через блок запрета 30 по конечному положению регулирующего органа 19 и усилитель 32 поступает на исполнительный механизм 33, который отключает регулирующий орган 19. Регулирующий орган 19 отключает передачу 10 и включает передачу 11, обеспечивая этим переключение транспортера 5 с режима разгрузки на режим накопления. Одновременно регулирующим органом 19 отключается датчик 23 (фиг.1), размыкая цепь блока запрета 30 по конечному положению регулирующего органа 19 и выключается исполнительный механизм 33. Параллельно с этим включается датчик 22 и замыкается цепь блока запрета 29 по начальному положению регулирующего органа 19. При выключенном регулирующем органе 19 вращение от опорного колеса 9 (или колеса 38) на вал 8 передается через цепную передачу 11. Скорость пальцев 6 транспортера 5 уменьшается до скорости, которую они имели при режиме накопления хлебной массы предыдущей порции. Далее процесс работы жатки повторяется.
В прицепном варианте жатки вращение на рабочие органы (режущий аппарат 2 и эксцентриковое мотовило 1) производится от вала отбора мощности трактора.
Привод режущего аппарата 2 осуществляется карданным валом, который вилкой шарнира 44 (фиг.11) надевается на хвостовик вала отбора мощности трактора. Другой конец карданного вала при помощи вилки шарнира 43 соединяется с валом IV раздаточной коробки 42. Далее цепная передача 50 (фиг.12) передает вращение кривошипно-шатунному механизму 49, который сообщает возвратно-поступательное движение ножу режущего аппарата 2.
Привод эксцентрикового мотовила 1 осуществляется карданным валом трактора, он передает вращение на вал III раздаточной коробки 42, затем цепной передачей 55 вращение передается на вал I, а цепной передачей 58 вращение передается на вал II ведущего шкива вариатора 60. Затем клиноременной передачей 61 вращение передается ведомому шкиву 62 вариатора. А от звездочки 63, закрепленной на одном контрприводном валу VI с ведомым шкивом 62 вариатора, цепной передачей 64 вращение передается на звездочку 65, закрепленную на трубчатом валу V эксцентрикового мотовила 1 жатки.
В остальном принцип работы прицепной жатки такой же, как было указано выше для самоходной жатки.
Регулировка и настройка самоходной валковой жатки производится следующим образом. Величина угла разворота платформы α выбирается в зависимости от ширины, глубины следа “П” (фиг.4), получаемого от опорных колес жатвенного агрегата. Оптимальная величина угла α=20-35°. Угол разворота платформы α регулируется поворотом или перестановкой опорных колес относительно платформы жатки, но так, чтобы уменьшить ширину следа колес агрегата. В случае прицепного варианта жатки с прямоугольным транспортером, кроме вышесказанного, необходимо также повернуть сницу на требуемый угол разворота платформы α за счет изменения длины промежуточных тяг 40 и фиксации опорных колес 38 по направлению движения агрегата (фиг. 10), чтобы величина прокоса а’ (фиг.4) была не менее 2000 мм и была достаточной для прохода трактора с минимальной шириной колеи 1800 мм плюс 200 мм - запас. Прямоугольный транспортер прицепной и самоходной жатки более прост в изготовлении и надежен в работе, чем, например, параллелограммный.
Выбор необходимой скорости грузонесущей части транспортера 5 при режиме накопления, т.е. выбор желаемой мощности и концентрации (ширины и толщины) валка, осуществляется оператором по определенной программе в зависимости от характеристики хлебостоя. Это достигается изменением передаточного числа цепных передач 10 и 11, изменением длины грузонесущей части транспортера и настройкой системы автоматического управления. Настройка достигается регулировкой выноса щупа 21 датчика валка 20, а также выносом щупов 27 и 28 датчиков начального 25 и конечного 26 положения грузонесущих пальцев 6 транспортера 5. Настройка производится с учетом времени на срабатывание системы автоматического управления при включении транспортера 5 на разгрузку хлебной массы и на накопление ее на транспортере 5. При этом вынос щупа 27 датчика 25 осуществляется с некоторым запасом, например на 10-20 см. Это обеспечивает включение датчика 25 начального положения грузонесущих пальцев 6 транспортера 5 за 0,5-1,0 м до на начала предыдущей порции валка.
Преимущества валковой жатки с платформой, установленной под углом к направлению движения агрегата, заключается в повышении устойчивости валка к проваливанию в колеи агрегата. Образуется качественный валок по всей его длине, включая колеи опорных колес жатвенного агрегата. Поэтому валок хорошо просыхает, и, как следствие, снижаются потери зерна при подборе валков и их обмолоте. Повышается производительность валковой жатки при скашивании в валок и комбайного агрегата при подборе и обмолоте валка.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Авторское свидетельство СССР №1530135, А 01 Д 57/20, 34/00 1989 г.
2. Авторское свидетельство СССР №1166712, А 01 Д 35/00 1981 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| Валковая жатка | 1981 |
|
SU1166712A1 |
| Валковая жатка | 1978 |
|
SU722515A1 |
| Валковая жатка | 1989 |
|
SU1625413A1 |
| СПОСОБ РАЗДЕЛЬНОЙ УБОРКИ ЗЕРНОВЫХ КУЛЬТУР И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2285382C1 |
| Валковая жатка | 1978 |
|
SU753383A1 |
| Валкоукладчик хлебной массы | 2019 |
|
RU2710166C1 |
| ВАЛКООБРАЗУЮЩИЙ ТРАНСПОРТЕР ЖАТКИ-НАКОПИТЕЛЯ | 1991 |
|
RU2060624C1 |
| СПОСОБ УКЛАДКИ ХЛЕБНОЙ МАССЫ ВАЛКА НА СТЕРНЮ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2262829C1 |
| ВАЛКОВАЯ ЖАТКА | 1970 |
|
SU268057A1 |
| ВАЛКОВАЯ ПОРЦИОННАЯ ЖАТКА С УСТРОЙСТВОМ ОБРАЗОВАНИЯ СТЕРНЕВЫХ КУЛИС | 2012 |
|
RU2493685C1 |


Изобретение относится к сельскохозяйственному машиностроению и может быть использовано в устройствах для скашивания хлебов в валок. Валковая жатка содержит платформу с режущим аппаратом и эксцентриковым мотовилом. Платформа жатки установлена под углом к направлению движения агрегата по направлению часовой стрелки на величину угла разворота уложенных в валок стеблей. Процесс формирования валка складывается из предварительного накопления хлебной массы на платформе в виде порции и последующей разгрузки ее на стерню с образованием валка в форме параллелограмма с разворотом валка на стерне на величину угла разворота стеблей в валке, что позволяет укладывать стебли в валке в местах прохода колес жатвенного агрегата. Стебли в валке зависают над колеями и не проваливаются в них, что увеличивает устойчивость лежащих на примятой стерне валков. Жатка позволяет полностью собрать весь урожай с нормальной влажностью и качеством зерна. 2 з.п. ф-лы, 12 ил.
| Валковая жатка | 1981 |
|
SU1166712A1 |
| ВАЛКОВАЯ ЖАТКА | 0 |
|
SU268057A1 |
| ВАЛКООБРАЗУЮЩИЙ ТРАНСПОРТЕР ЖАТКИ-НАКОПИТЕЛЯ | 1991 |
|
RU2060624C1 |
| Способ формирования хлебной массы в валок и устройство для его осуществления | 1988 |
|
SU1530135A1 |
| US 5463857 А, 07.11.1995 | |||
| DE 3638076 A1, 11.05.1988. | |||

