Изобретение относится к авиации, более конкретно - к аппаратам тяжелее воздуха, а именно к самолетам схемы “утка”, и может быть использовано в конструкции пассажирских, транспортных самолетов для повышения их экономичности и топливной эффективности.
Уровень техники
Известны самолеты схемы “утка”, включающие фюзеляж, крыло, вертикальное оперение и переднее горизонтальное оперение. (См., например, Проектирование самолетов /Под ред. С.М.Егера, М.: Машиностроение, 1983 г., стр. 101-105). Такая схема родилась из желания конструкторов избавиться от балансировочного сопротивления, создаваемого за счет направленной вниз нагрузки горизонтального оперения самолетов “нормальной” схемы. За все время существования авиации построено немало пассажирских самолетов схемы, “утка” однако, все они существовали либо в виде единичных экземпляров, либо в виде небольших партий, и не получили распространения в настоящее время. Исключение составляют ряд скоростных маневренных реактивных самолетов схемы “утка”: “Вигген” (Швеция), “Мираж” 4000, “Рафаил” (Франция) и др., в которых недостатки схемы компенсируются за счет использования автоматических систем управления и устойчивости. Для статически устойчивых самолетов (что характерно для пассажирских и транспортных самолетов) использование схемы “утка” влечет за собой ряд недостатков.
Так установлено, что “...при одинаковых относительных геометрических параметрах крыла и оперения (Су кр.≈Су го) и при соблюдении “правила продольного V” (α го>α кр) горизонтальное оперение в схеме “утка” должно быть более нагруженным в аэродинамическом отношении, и это предрасполагает к преждевременному (относительно крыла) срыву потока с оперения при увеличении его подъемной силы вследствие увеличения угла атаки от вертикального порыва ветра, либо вследствие управляющего воздействия для кабрирования самолета при маневрировании в плоскости продольного движения. Этот недостаток схемы “утка”, известный как тенденция к “клевку”, в особенности на взлетно-посадочных режимах, привел к тому, что эта схема широко применявшаяся в начале развития авиации, впоследствии практически не использовалась” (см. Проектирование самолетов, там же, стр. 103).
В силу вышеуказанного в схеме “утка” несущие свойства крыла не используются в полной мере, что приводит к ухудшению взлетно-посадочных характеристик либо к переразмериванию крыла - увеличению его площади и массы.
Кроме того, нагруженность переднего оперения снижает возможности использования его для управления самолетом в продольной плоскости.
Более того, снижается безопасность полетов. Известен самолет с передним горизонтальным оперением - самолет-триплан (см. патент РФ №2172706, МПК В 64 С 39/12, 2001 г.)
Самолет-триплан имеет фюзеляж, крыло, вертикальное оперение, а также переднее (ПГО) и заднее (ГО) горизонтальные оперения. Переднее горизонтальное оперение выполнено шарнирно установленным на оси, направленной вдоль его размаха, и самоустанавливающимся на заданный угол атаки с выполнением условия Супго≈0. Сам самолет-триплан выполнен сбалансированным по схеме “утка” для крейсерских режимов полета и статически устойчивым по “нормальной” схеме. Таким образом, ПГО обеспечивает балансировку самолета, но практически не участвует в обеспечении статической устойчивости (в то же время и не создает дестабилизирующего момента), в то время как ГО обеспечивает статическую устойчивость, практически не участвуя в балансировке на крейсерских режимах полета, и обеспечивает управление самолетом в продольном канале.
Недостатком такой схемы является наличие трех аэродинамических поверхностей (крыло, ГО и ПГО), не всегда используемых с максимальными нагрузками, что приводит к снижению аэродинамического качества и увеличению массы конструкции, а следовательно, - к снижению весовой отдачи и транспортной эффективности самолета.
Сущность изобретения
Задачей изобретения является разработка такой конструкции самолета схемы “утка”, которая позволила бы полностью использовать несущие свойства крыла, обеспечивая при этом безопасную эксплуатацию самолета. Более того, должно быть обеспечена управляемость самолета в продольном канале за счет переднего горизонтального оперения.
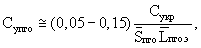
Поставленная задача достигается тем, что в самолете с передним горизонтальным оперением, включающем фюзеляж, крыло, вертикальное оперение, переднее горизонтальное оперение, выполненное шарнирно установленным вокруг оси, перпендикулярной плоскости симметрии с производной коэффициента подъемной силы по углу атаки самолета - Су≅ 0 для мгновенного (близкого к мгновенному) изменения угла атаки, и самоустанавливающимся на заданный угол атаки, систему управления с механизмом управления в продольном канале, переднее горизонтальное оперение выполнено с коэффициентом подъемной силы, меньшим коэффициента подъемной силы крыла для крейсерских режимов полета настолько, что выполняется условие
где Су пго - усредненный коэффициент подъемной силы переднего горизонтального оперения на крейсерских режимах полета;
Су кр - усредненный коэффициент подъемной силы крыла на крейсерских режимах полета;
Sпго - площадь переднего горизонтального оперения, отнесенная к площади крыла;
Lпго.э - плечо переднего горизонтального оперения, отнесенное к средней аэродинамической хорде крыла,
взятое с учетом скоса от переднего горизонтального оперения, при этом ПГО выполнено включенным в механизм управления в продольном канале.
Кроме того, половинки ПГО выполнены с трубчатыми лонжеронами, концы которых закреплены шарнирно на оси в подшипниковых узлах, установленных в носовой части фюзеляжа, при этом концы трубчатых лонжеронов связаны между собой соединительной трубой.
Более того, половинки ПГО выполнены в своей хвостовой части с серворулями, снабженными шарнирными тягами, связанными с механизмом управления ПГО, выполненным в виде центральной тяги, расположенной внутри трубчатых лонжеронов, и перемещающейся относительно них в опорах скольжения, допускающих поворот трубчатых лонжеронов относительно центральной тяги, при этом центральная тяга снабжена на своих концах шарнирными тягами, другие концы которых через двуплечие качалки, установленные шарнирно внутри конструкции половинок ПГО, связаны с шарнирными тягами серворулей, в то время как средней своей частью центральная тяга через механическую проводку связана с приводом механизма управления.
При этом ПГО снабжено демпфером крутильных колебаний вокруг оси установки, обеспечивающим плавность его перемещений в пределах летных углов атаки.
Сам демпфер крутильных колебаний выполнен в виде демпфера продольных перемещений, включающим выходной шток, связанный с кронштейном, установленным на соединительной трубе.
Изобретение поясняется чертежами, на которых
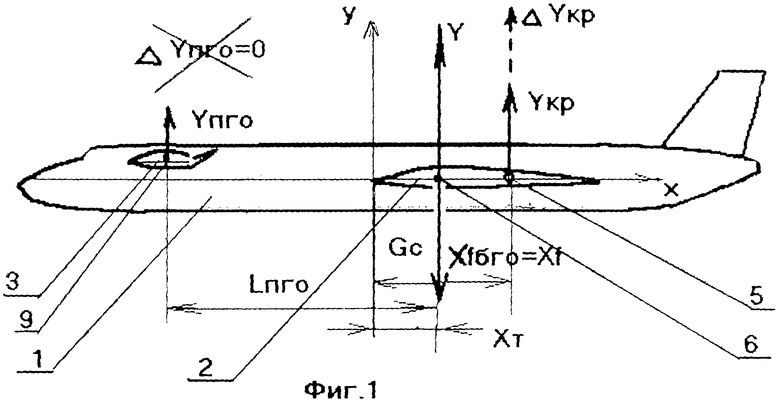
- Фиг.1 показывает балансировочную схему самолета, выполненного в соответствии с изобретением;
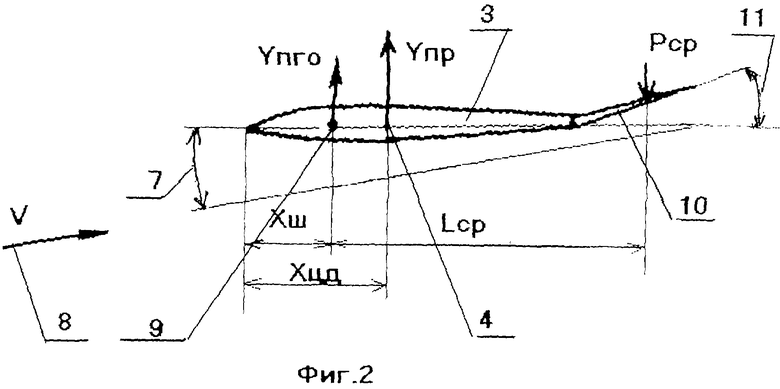
- Фиг.2 показывает балансировочную схему переднего горизонтального оперения (ПГО) самолета;
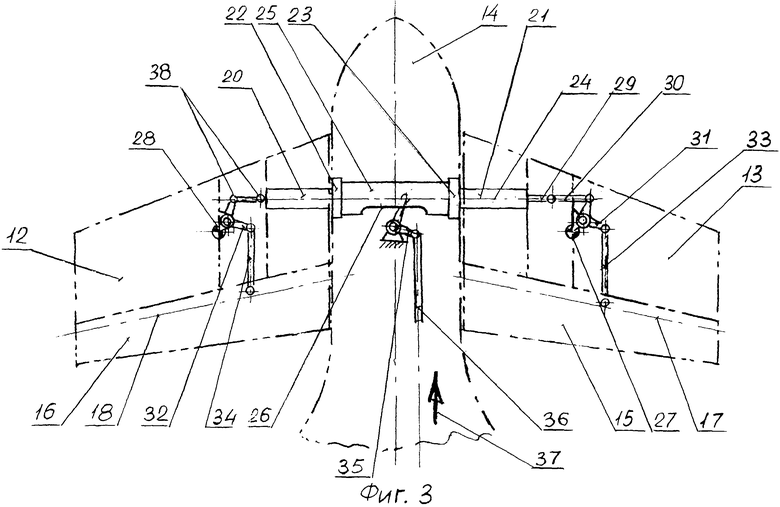
- Фиг.3 показывает схему управления ПГО.
Принятые обозначения:
1 - фюзеляж; 2 - крыло; 3 - переднее горизонтальное оперение (ПГО); 4 - центр давления профиля ПГО; 5 - центр давления крыла; 6 - центр тяжести самолета; 7 - угол установки ПГО - α пго; 8 - направление набегающего потока; 9 - шарнир подвески ПГО; 10 - серворуль ПГО; 11 - угол отклонения серворуля - δ ср.
- Yкр - подъемная сила крыла;
- Δ Yкр. - приращение подъемной силы крыла при изменении угла атаки;
- Yпго - подъемная сила ПГО, Yпго=Yпр-Pсp, где Yпр=Су пр•Sпго - подъемная сила профиля ПГО при отсутствии серворуля, a Pсp - вертикальное усилие, создаваемое серворулем;
- Δ Yпго - приращение подъемной силы ПГО при изменении угла атаки;
- Gc - сила веса самолета;
- Y=Yкр+Yпго - подъемная сила самолета;
- Lпго - плечо ПГО;
- Хт - координата центра тяжести самолета;
- Xf - координата фокуса самолета.
Сведения, подтверждающие осуществимость изобретения
Пример реализации изобретения для пассажирского или транспортного самолета, обладающего продольной статической устойчивостью.
Самолет в соответствии с изобретением содержит (см. фиг.1 и 2) основную несущую поверхность - крыло 2, переднее горизонтальное оперение (ПГО) - 3, снабженное серворулем 10, установленные на фюзеляже 1.
ПГО выполнено установленным шарнирно на оси 9, закрепленной на фюзеляже 1 перпендикулярно плоскости симметрии самолета вдоль размаха оперения, и снабжено на задней кромке серворулем 10, отклоняющимся на угол - 11.
ПГО снабжено механизмом управления, включенным в систему продольного управления самолета. При этом ПГО выполнено с коэффициентом подъемной силы Cу пго, меньшим коэффициента подъемной силы крыла - Су кр для крейсерских режимов полета самолета настолько, что выполняется условие
где Су пго - усредненный коэффициент подъемной силы переднего горизонтального оперения на крейсерских режимах полета;
Су кр - усредненный коэффициент подъемной силы крыла на крейсерских режимах полета;
Sпго - площадь переднего горизонтального оперения, отнесенная к площади крыла;
Lпго - плечо переднего горизонтального оперения, отнесенное к средней аэродинамической хорде крыла, взятое с учетом скоса от переднего горизонтального оперения.
Обеспечение устойчивости и балансировки самолета производится следующим образом.
На установившемся режиме полета шарнирный момент на ПГО и его подъемная сила (см. фиг.1, 2).
Мш0=-Yпр(Хцд-Хш)+Рв.срLср=О
Yпго=Yпр-Рв.ср
и коэффициент шарнирного момента

где α пго=α уст - заданный из условия балансировки угол атаки ПГО.
При воздействии возмущения Δ α

Приращение шарнирного момента

будет <0 при выполнении условия

Поскольку Δ Мш<0, ПГО поворачивается на уменьшение угла атаки
α пго+Δ α → α уст и Δ α пго=0.
При воздействии мгновенного (или близкого к мгновенному) возмущения Δ α возникает значительный восстанавливающий момент, приводящий к быстрому, в силу малоинерционности ПГО по сравнению с самолетом, установлению прежнего равновесного положения ПГО с прежними действующими силами. Yпго после действия возмущения будет равен Yпго до возмущения и
Δ Yпго=Cупго(Δ α )=0, и Δ Cупго≈0
Таким образом, производная коэффициента подъемной силы ПГО по углу атаки самолета практически равна нулю, т.е. Супго≈0. Тогда смещение фокуса самолета за счет наличия ПГО
т.е. 
Таким образом, обеспечение устойчивости самолета происходит с помощью крыла за счет более заднего расположения фокуса самолета по отношению к центру тяжести.
Из условия равновесия самолета (приближенно, без учета подъемных сил других частей самолета ввиду их малости)

Откуда

где  берутся с учетом скоса потока от ПГО, a Xf - положение фокуса самолета с учетом всех его частей, кроме ПГО.
берутся с учетом скоса потока от ПГО, a Xf - положение фокуса самолета с учетом всех его частей, кроме ПГО.
Целесообразно для транспортного или пассажирского самолета задавать степень продольной статической устойчивости в диапазоне m
И тогда 
т.е. Су пго<Сукр
Примем, исходя из существующих на практике средних значений параметров: m
 тогда Супго≈0,2 Сукр.
тогда Супго≈0,2 Сукр.
Т.е. при обеспечении требуемой степени продольной статической устойчивости коэффициент подъемной силы на ПГО меньше коэффициента подъемной силы крыла. Более того, например, для легких пассажирских (деловых) самолетов, целесообразно выполнять ПГО с площадью  а его плечо
а его плечо  выполнять равным 2-3,0 bA, где bA - величина средней аэродинамической хорды (при этом меньшим значениям Sпго будут соответствовать большие значения Lпго). Тогда Супго - коэффициент подъемной силы переднего горизонтального оперения на крейсерских режимах полета будет равным ≈ 0,111-0,94 Сукр. Для современных легких самолетов для крейсерских режимов полета коэффициент подъемной силы выбирают равным Сукр=0,3-0,4, тогда Су пго будет равным 0,033-0,32, что для используемых современных профилей, имеющих допускаемый коэффициент подъемной силы (из условия недопущения срыва) Су>0,8, вполне достаточно не только для балансировки самолета на крейсерских режимах полета, но и для балансировки на маневренных и взлетно-посадочных режимах.
выполнять равным 2-3,0 bA, где bA - величина средней аэродинамической хорды (при этом меньшим значениям Sпго будут соответствовать большие значения Lпго). Тогда Супго - коэффициент подъемной силы переднего горизонтального оперения на крейсерских режимах полета будет равным ≈ 0,111-0,94 Сукр. Для современных легких самолетов для крейсерских режимов полета коэффициент подъемной силы выбирают равным Сукр=0,3-0,4, тогда Су пго будет равным 0,033-0,32, что для используемых современных профилей, имеющих допускаемый коэффициент подъемной силы (из условия недопущения срыва) Су>0,8, вполне достаточно не только для балансировки самолета на крейсерских режимах полета, но и для балансировки на маневренных и взлетно-посадочных режимах.
Для конкретного самолета ПГО выполняется из двух половинок 12 и 13, закрепленных по обеим сторонам носовой части фюзеляжа 14, и снабжено механизмом управления, включающим (см. фиг.3) серверули 15, 16 закрепленные шарнирно на половинках ПГО на осях 17, 18 соответственно, и механическую проводку, связывающую серворули 16 и 15 между собой и с механизмом управления самолетом в продольном канале.
Половинки ПГО 12 и 13 снабжены трубчатыми лонжеронами 20 и 21 соответственно, с помощью которых они закреплены шарнирно на оси 24 в подшипниковых узлах 22 и 23, установленных в носовой части фюзеляжа 14. Концы трубчатых лонжеронов 20 и 21 связаны между собой соединительной трубой 25, фиксирующей половинки 12 и 13 от продольных перемещений в подшипниковых узлах 22 и 23. В то же время соединительная труба 25 жестко связана с трубчатыми лонжеронами 20, 21, обеспечивая синхронное отклонение половинок ПГО - 12 и 13. Соединительная труба 25 в центральной своей части снабжена боковой прорезью 26. Ось 24 вращения расположена впереди центров давления 27, 28 половинок ПГО. Половинки ПГО 12, 13 выполнены в своей хвостовой части с серворулями 15, 16, вращающихся вокруг осей навески 17, 18 соответственно. Серворули снабжены шарнирными тягами 33 и 34.
ПГО снабжено механизмом управления, выполненным в виде центральной тяги 29, расположенной внутри трубчатых лонжеронов 20, 21, и перемещающейся относительно их в опорах скольжения (не показано), допускающих поворот трубчатых лонжеронов относительно центральной тяги. Центральная тяга 29 снабжена на своих концах шарнирными тягами 30, другие концы которых через двуплечие качалки 31, 32, установленные шарнирно внутри конструкции половинок ПГО, связаны с шарнирными тягами 33, 34 серворулей 15, 16, при этом точка соединения тяг и серворулей расположена выше осей вращения сероворулей (не показано) для обеспечения управляемого поворота серворулей. Средней своей частью центральная тяга 29 через механическую проводку связана с приводом механизма управления ПГО.
Механическая проводка выполнена в виде тяг и качалок. В центральной своей части центральная тяга 29 связана с двуплечей качалкой 35, шарнирно установленной на конструкции носовой части фюзеляжа 14. Связь центральной тяги 29 с плечом двуплечей качалки 35 выполнена в виде пальца, закрепленного на конце плеча качалки и находящегося в поперечном пазу центральной тяги (не показано). Другое плечо качалки 35 связано с тягой 36, в свою очередь связанную с приводом механизма управления продольным каналом (не показано). Привод механизма управления продольным каналом может быть в виде рукоятки при ручном управлении, либо в виде рулевого привода автопилота.
Соединения качалок с тягами выполнено с помощью универсальных шарниров 38, допускающих поворот половинок ПГО 12, 13 в пределах летных углов атаки ПГО.
ПГО снабжено демпфером крутильных колебаний вокруг оси установки 24 ПГО, обеспечивающим плавность его перемещений в пределах летных углов атаки.
Целесообразно демпфер крутильных колебаний выполнять в виде демпфера продольных перемещений. Такой демпфер может быть выполнен гидравлическим, включающим гидроцилиндр, поршень с системой перепускных отверстий, обеспечивающих необходимые характеристики, и выходной шток, связанный с поршнем. Свободный конец выходного штока соединен с кронштейном, установленном на соединительной трубе 25 (не показано), в то время как гидроцилиндр шарнирно закреплен на конструкции фюзеляжа. Характеристики демпфера подбираются таким образом, чтобы колебания ПГО, обусловленные его собственной аэродинамической устойчивостью, а также нежесткостью конструкции, были бы задемпфированы так, чтобы декремент затухания ξ находился в пределах ξ =0,5-0,7. Таким образом, обеспечивается плавность перемещения половинок ПГО под воздействием мгновенных (или близких к мгновенным) воздушных возмущений и управляемость ПГО. Демпфер снабжен ограничителями перемещения выходного штока в крайних положениях, обеспечивающих перемещение ПГО в пределах летных углов атаки. Кроме того, установка гидроцилиндра демпфера может быть выполнена на подвижном, регулируемом основании с помощью своего привода, благодаря чему может решаться проблема заедания ПГО в шарнире из-за обледенения и др. причин. В этом случае установка демпфера может использоваться для страгивания ПГО или установки его на заданный угол. Управление ПГО осуществляется следующим образом.
При перемещении тяги 36 (с помощью рукоятки управления продольным каналом) происходит поворот качалки 35 против часовой стрелки, что приводит к перемещению влево центральной тяги 29 и связанных с нею тяг 30, что, в свою очередь, приводит к повороту против часовой стрелки качалок 31 и 32, выполненных идентично друг другу. Одновременный поворот качалок 31 и 32 вызывает одновременное и идентичное перемещение тяг, что приводит к идентичному отклонению серворулей 15 и 16 вверх, вызывая тем самым перемещение половинок ПГО на увеличение угла атаки. Уменьшение угла атаки ПГО достигается перемещением тяги 36 в направлении, противоположном направлению стрелки 37.
С другой стороны, при воздействии на ПГО мгновенных порывов воздушного потока, имеющего вертикальную составляющую, половинки 12 и 13 могут отклоняться синхронно от установленного управлением заданного угла атаки на некоторое мгновение, а затем под воздействием возникающего аэродинамического момента они будут возвращаться в исходное положение, выдерживая установленный угол атаки вышеописанным образом в соответствии с фиг.2. При этом механизм управления остается неподвижным в силу того, что центральная тяга 29 и тяги 30 находятся на оси вращения ПГО и допускают его поворот в пределах летных углов атаки. При возникновении постоянного возмущения с помощью системы управления устанавливается новое балансировочное положение (угол атаки) ПГО.
Целесообразно крыло выполнять с концевыми элевонами, расположенными на задней кромке, могущими работать как элероны, отклоняющиеся дифференциально, и как рули, отклоняющиеся однонаправленно, при необходимости внесения корректировки в балансировку самолета.
В остальном самолет должен быть оборудован известными системами и оборудованием, обеспечивающим его безопасное и эффективное функционирование.
Такое выполнение переднего горизонтального оперения позволяет:
- максимально использовать несущие свойства крыла и за счет этого улучшить взлетно-посадочные характеристики самолета, расширив (≅ вдвое) диапазон его скоростей;
- повысить аэродинамическое качество за счет меньших балансировочных потерь на всех режимах полета (по сравнению с нормальной схемой);
- исключить “клевки” из-за срыва потока на оперении и повысить безопасность полета;
- исключить опасность потери управляемости в продольном канале за счет большого запаса по Су пго.
| название | год | авторы | номер документа |
|---|---|---|---|
| САМОЛЕТ-ТРИПЛАН | 1998 |
|
RU2172706C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ СХЕМЫ "ФЛЮГЕРНАЯ УТКА" (КРАСНОВ-УТКА) | 2015 |
|
RU2609644C1 |
| Игнорирующий турбулентность самолет и датчик изменения угла атаки самолета | 2019 |
|
RU2710955C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2409504C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ФЛЮГЕРНЫМ ГОРИЗОНТАЛЬНЫМ ОПЕРЕНИЕМ | 2015 |
|
RU2609620C1 |
| МНОГОЦЕЛЕВОЙ КРИОГЕННЫЙ КОНВЕРТОПЛАН | 2009 |
|
RU2394723C1 |
| Многоцелевая сверхтяжелая транспортная технологическая авиационная платформа укороченного взлета и посадки | 2019 |
|
RU2714176C1 |
| МАЛОЗАМЕТНЫЙ САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2018 |
|
RU2705416C2 |
| СКОРОСТНОЙ ВЕРТОЛЕТ-САМОЛЕТ-АМФИБИЯ | 2017 |
|
RU2655249C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2012 |
|
RU2509033C1 |
Изобретение относится к авиации, более конкретно - к аппаратам тяжелее воздуха, а именно к самолетам схемы “утка”, и может быть использовано в конструкции пассажирских, транспортных самолетов для повышения их экономичности и топливной эффективности. В самолете переднее горизонтальное оперение (ПГО) выполнено шарнирно установленным вокруг оси, перпендикулярной плоскости симметрии, с производной коэффициента подъемной силы по углу атаки самолета Суα≈0, самоустанавливающимся на заданный угол атаки и с коэффициентом подъемной силы, меньшим коэффициента подъемной силы крыла для крейсерских режимов полета. ПГО выполнено включенным в механизм управления в продольном канале, а половинки ПГО выполнены с трубчатыми лонжеронами, концы которых закреплены шарнирно на оси в подшипниковых узлах, установленных в носовой части фюзеляжа. Концы трубчатых лонжеронов связаны между собой соединительной трубой. Половинки ПГО выполнены в своей хвостовой части с серворулями, снабженными шарнирными тягами, связанными с механизмом управления ПГО. Технический результат - обеспечение управляемости самолета в продольном канале за счет переднего горизонтального оперения. 5 з.п. ф-лы, 3 ил.
где  - усредненный коэффициент подъемной силы переднего горизонтального оперения на крейсерских режимах полета;
- усредненный коэффициент подъемной силы переднего горизонтального оперения на крейсерских режимах полета;
 - усредненный коэффициент подъемной силы крыла на крейсерских режимах полета;
- усредненный коэффициент подъемной силы крыла на крейсерских режимах полета;
 - площадь переднего горизонтального оперения, отнесенная к площади крыла;
- площадь переднего горизонтального оперения, отнесенная к площади крыла;
 - плечо переднего горизонтального оперения, отнесенное к средней аэродинамической хорде крыла, взятое с учетом скоса потока от переднего горизонтального оперения.
- плечо переднего горизонтального оперения, отнесенное к средней аэродинамической хорде крыла, взятое с учетом скоса потока от переднего горизонтального оперения.
| САМОЛЕТ-ТРИПЛАН | 1998 |
|
RU2172706C2 |
| САМОЛЕТ | 1993 |
|
RU2087384C1 |
| Устройство для передачи на расстояние показаний измерительных приборов | 1947 |
|
SU84686A1 |
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |

