Настоящее изобретение относится к системе управления тягой газотурбинного двигателя и, в частности, к системе, выдающей пилоту сигнал частоты вращения воздушного винта, компенсирующий отклонения показателей тяги, соответствующих измеренным характеристикам тяги конкретного газотурбинного двигателя, от стандартных характеристик тяги двигателя этой модели, чтобы дать пилоту возможность более точно согласовать фактическую тягу двигателя с требованиями к тяге.
Конструкция, изготовление, система контроля отклонений и суммарные допуски газотурбинных двигателей ведут к различиям рабочих характеристик разных экземпляров двигателей, относящихся к одной и той же модели. Одной из этих рабочих характеристик является величина тяги. Для того чтобы обеспечить безопасную работу самолета, газотурбинные двигатели обычно конструируют таким образом, чтобы любой конкретный двигатель мог развивать определенный заранее минимальный или номинальный уровень тяги вне зависимости от различий в деталях и подсистемах. Кроме того, пилот осуществляет управление самолетом согласно определенным заранее кривым показателей работы двигателя данной модели. Эти кривые позволяют пилоту осуществлять контроль частоты вращения воздушного винта, чтобы добиться нужной тяги от любого двигателя определенной модели даже в том случае, когда все суммарные допуски определенного двигателя сдвигаются к такой конфигурации двигателя, при которой он развивает минимальную тягу. Любой двигатель с допусками и отклонениями, не ограниченными конфигурацией наименьшей выходной мощности, разовьет тягу, превышающую ту тягу, которая может быть эффективно использована самолетом при определенных условиях эксплуатации. Избыточный уровень тяги с сопровождающим его повышением рабочих температур вызван более высоким, чем требующееся, числом оборотов двигателя. Более высокая рабочая температура двигателя способствует усилению износа двигателя, что ведет к снижению срока его службы.
В существующих газотурбинных двигателях с гидромеханическими топливными системами структура управления разработана таким образом, что двигатель, работающий в “минимальном” или “наихудшем” режиме, развивает требующуюся тягу с запасом по сравнению с заданным параметром установки тяги (частота вращения воздушного винта). Заданные показатели частоты вращения воздушного винта определяются на основе условий окружающей среды, рабочих характеристик двигателя и требующейся номинальной тяги. В связи с ограничениями, которые накладывают гидромеханические топливные системы, не удается добиться подстройки заданных показателей частоты вращения двигателя к отдельным двигателям. Поэтому применение системы настройки тяги для двигателя, работающего в “минимальном” или “наихудшем” режиме, ведет к появлению большого количества двигателей с избыточной тягой.
Предметом настоящего изобретения является система индикации частоты вращения газотурбинных двигателей с гидромеханическими топливными системами, которая компенсирует возникающие на практике отклонения силы тяги от ее номинального значения. В данном изобретении заранее построенные кривые рабочих характеристик модели двигателя и фактические данные о работе двигателя применяются для расчета модифицированного параметра настройки тяги (частоты вращения воздушного винта). Кривые, представляющие изменение частоты вращения воздушного винта определенной модели двигателя, запрограммированы в запоминающем устройстве. Выбор конкретной кривой изменения частоты вращения воздушного винта дает индикацию частоты вращения винта, позволяющую пилоту более точно согласовать фактическую тягу двигателя с нужным значением тяги двигателя. Конкретнее, оператор двигателя устанавливает дроссель двигателя таким образом, что модифицированный сигнал частоты вращения воздушного винта согласуется с заданной частотой вращения воздушного винта, соответствующей требующемуся значению тяги для данных условий окружающей среды. Поскольку заданную частоту вращения воздушного винта устанавливают с использованием модифицированного сигнала частоты вращения воздушного винта, двигатель будет работать с меньшим числом оборотов по сравнению с заданным значением, установленным с использованием не модифицированного сигнала частоты вращения скорости. Это в свою очередь ведет к получению газотурбинного двигателя, развивающего нужную тягу при одновременном исключении избытка тяги, связанного с различиями между отдельными двигателями, что позволяет понизить температуру двигателя и увеличить срок службы двигателя.
Конструкция, работа и преимущества представленного варианта реализации настоящего изобретения станут более очевидными после изучения следующего описания, представленного вместе с прилагаемыми чертежами, на которых одинаковыми числовыми позициями обозначены одинаковые детали, на которых:
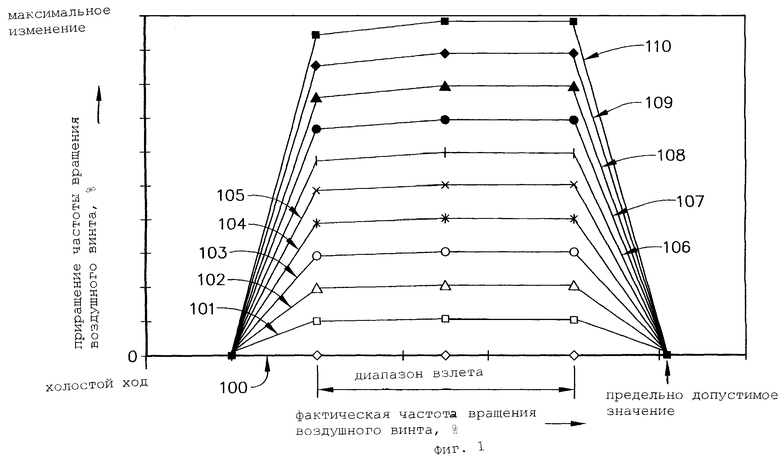
на фиг.1 графически представлены уровни изменения частоты вращения воздушного винта, применяемые для выравнивания тяги для диапазона отклонений силы тяги двигателя;
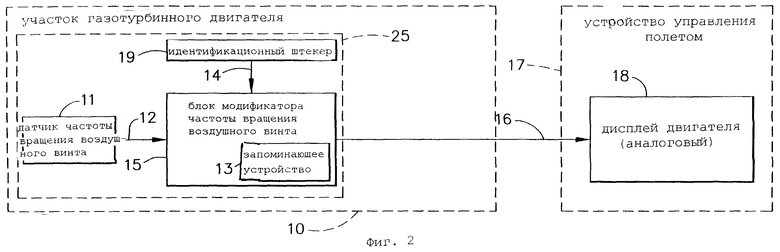
на фиг.2 показана блок-схема, иллюстрирующая предпочтительный вариант реализации системы регулирования частоты вращения газотурбинного двигателя в соответствии с настоящим изобретением;
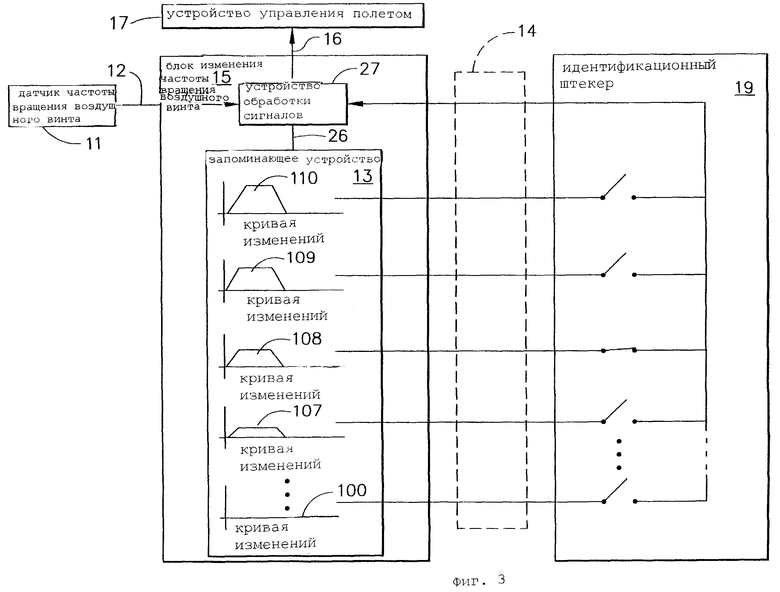
на фиг.3 показана блок-схема, иллюстрирующая систему изменения частоты вращения воздушного винта;
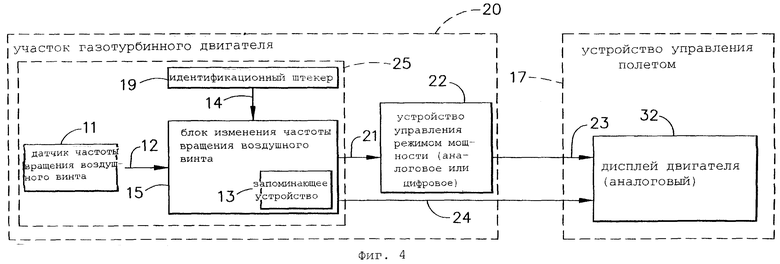
на фиг.4 показана блок-схема, иллюстрирующая второй предпочтительный вариант реализации системы регулирования частоты вращения газотурбинного двигателя в соответствии с настоящим изобретением.
В процессе испытаний образцов газовых турбин данной модели двигателя после первоначального изготовления происходит определение рабочих характеристик двигателя определенной модели. Эти данные о рабочих характеристиках применяют для выработки характеристик изменения частоты вращения воздушного винта, представляющих типичные отличия фактических значений силы тяги двигателей от номинальной частоты вращения двигателей данной модели. Эти выработанные характеристики изменения частоты вращения двигателя показывают соответствующее изменение частоты вращения воздушного винта, требующееся для согласования фактически развиваемой тяги с номинальной требующейся тягой. На фиг.1 графически представлены характеристики рабочей частоты вращения воздушного винта, типичные для двигателей, относящихся к определенной модели, по сравнению с номинальным заданным значением частоты вращения, демонстрирующие уровень изменения частоты вращения двигателя, необходимого для получения силы тяги, ожидаемой при каждом конкретном заданном значении частоты вращения. Характеристики 100-110 частоты вращения воздушного винта определяют эмпирически путем оценки большого количества двигателей определенной модели. Требующееся изменение частоты вращения меняется в зависимости от физической частоты вращения воздушного винта и уровни изменений являются наибольшими при скоростях взлета, когда ухудшение рабочих характеристик двигателя из-за высоких температур является наибольшим. Каждая из характеристик 100-110 является показателем частоты вращения некоторых членов семейства двигателей определенной модели. Характеристика 100 показывает номинальную частоту вращения воздушного винта, соответствующую заданной оператором частоте вращения конкретного газотурбинного двигателя. Характеристики 101-109 показывают отклонение частоты вращения двигателя от выбранной оператором номинальной частоты вращения определенных групп двигателей одного типа, для которых характеристика 100 представляет номинальную скорость. Характеристика 110 показывает максимальное прогнозируемое отклонение частоты вращения двигателя от выбранной оператором номинальной частоты вращения при нормальных условиях работы. Максимальное отклонение частоты вращения, показанное характеристикой 110, выбрано для того, чтобы гарантировать, что фактическая тяга, развиваемая двигателем, соответствует номинальному заданному значению, выбранному оператором, и представляет собой требующуюся тягу плюс запас надежности. Как показано в нижней левой части фиг.1, не требуют никаких коррекций газотурбинные двигатели, работающие на холостом ходу, поскольку на холостом ходу не развивается тяга. Когда двигатель приближается к скоростям взлета, происходит повышение силы тяги при росте отклонения конкретных двигателей от номинальных значений тяги. По мере того как частота вращения двигателя приближается к максимально допустимым условиям эксплуатации двигателя (красная черта), уровень изменений резко понижается при выборе пилотом максимальной силы тяги. На красной черте не производят никаких изменений частоты вращения воздушного винта, поскольку красная черта соответствует максимально допустимой рабочей скорости.
Уровень изменений частоты вращения, требующийся для получения нужного изменения частоты вращения определенного двигателя, основывается на результатах испытаний конкретного двигателя, проведенных или после его изготовления, или после капитального ремонта двигателя. Сразу после получения результатов испытаний отдельного двигателя измеряют характеристики развиваемой двигателем тяги в сопоставлении с номинальной силой тяги, развиваемой определенной моделью двигателя, так что можно определить подходящий уровень изменений частоты вращения для того, чтобы выбрать, какая из характеристик 101-109 наилучшим образом подходит для изменения частоты вращения данного конкретного двигателя для согласования фактической тяги с номинальной тягой. Настоящее изобретение позволяет изменить сигнал частоты вращения воздушного винта в реальном времени таким образом, что значение частоты вращения, выданное оператором двигателю, исправляется таким образом, чтобы компенсировать у данного конкретного двигателя измеренные отклонения от стандартной развиваемой тяги.
На фиг.2 показана система 25 изменения частоты вращения воздушного винта газотурбинного двигателя 10 и устройство 17 управления полетом. Датчик частоты вращения воздушного винта 11 соединяется проводником 12 с блоком изменения частоты вращения воздушного винта 15 (FSMU). Запоминающее устройство 13, находящееся в FSMU 15, запрограммировано на определенные характеристики частоты вращения газотурбинного двигателя, такие как, например, характеристики, представленные на фиг.1. Устройство выбора уровня изменения частоты вращения воздушного винта или идентификационный штекер 19 соединяется с FSMU 15 проводником 14. FSMU 15 выдает выходной сигнал, который передается по проводнику 16 на дисплей 18 двигателя на устройстве 17 управления полетом.
В процессе эксплуатации сигнал фактической (в реальном времени) частоты вращения воздушного винта изменяется в системе 25 изменения частоты вращения воздушного винта и затем передается по проводнику 16 в устройство 17 управления полетом. На фиг.3 проиллюстрирована блок-схема системы 25 изменения частоты вращения воздушного винта с фиг.2. Показана схема устройства выбора уровня изменения частоты вращения воздушного винта или идентификационного штекера 19, соединенного с FSMU 15 проводником 14. В предпочтительном варианте реализации устройство выбора уровня изменения частоты вращения воздушного винта или идентификационный штекер 19 содержит множество контактных штырей, расположенных таким образом, чтобы совмещаться с электрическими гнездами в FSMU 15. Электрическая схема идентификационного штекера сконструирована таким образом, что осуществляет отбор из запоминающего устройства 13 характеристик частоты вращения воздушного винта для конкретного двигателя. Так, например, на фиг.3 показано осуществление отбора из запоминающего устройства 13 информации, относящейся к кривой изменений 108, в то время как информация, относящаяся ко всем другим кривым изменений, остается не затронутой. Для достижения физической конфигурации, соответствующей выбору характеристики 108, как показано на фиг.3, когда штекер 19 вставлен в запоминающее устройство 13, должна соединяться пара штырей штекера 19, так что происходит активизация схемы, соответствующей выбору характеристики 108. Другие штыри штекера 19 должны оставаться не активированными, так как штыри, например, остаются отсоединенными, предупреждая активизацию неподходящего сигнала внесения изменений. Комплект идентификационных штекеров 19 должен включать в себя множество штекеров, по меньшей мере один из которых конфигурирован таким образом, чтобы выбирать каждую из характеристик 100-110, показанных на фиг.1, для определенной модели двигателя, так что после проверки показателя тяги определенного двигателя в схему должен быть вставлен штекер, обеспечивающий необходимую активизацию, чтобы получить на выходе запоминающего устройства 13 требующийся уровень внесения изменений с целью управления конкретным двигателем.
После выбора идентификационным штекером 19 нужной характеристики частоты вращения воздушного винта информацию характеристики частоты вращения воздушного винта (или информацию кривой изменений) направляют через проводник 26 в устройство 27 обработки сигнала. Фактическая частота вращения воздушного винта воспринимается датчиком 11 частоты вращения воздушного винта и передается в устройство 27 обработки сигнала по проводнику 12. Устройство 27 обработки сигнала суммирует сигналы, полученные по проводнику 26 и проводнику 12 для получения сигнала модифицированной частоты вращения воздушного винта. Сигнал модифицированной частоты вращения воздушного винта направляется в устройство 17 управления полетом по проводнику 16.
В предпочтительном варианте реализации сигнал модифицированной частоты вращения воздушного винта является аналоговым. Сигнал модифицированной частоты вращения воздушного винта выдается на дисплей 18 двигателя устройства 17 управления полетом с фиг.2 и фиг.3, так что значение сигнала модифицированной частоты вращения воздушного винта превышает значение фактической частоты вращения двигателя в диапазоне отрыва. Это большее показанное значение частоты вращения информирует оператора двигателя о том, что уставку дросселя можно понизить до заданной частоты вращения воздушного винта, требующейся для развития нужной тяги в случае конкретного двигателя. Понижение уставки дросселя в свою очередь понижает фактическую частоту вращения путем сокращения расхода топлива. Система изменения частоты 25 вращения выполняет самодиагностику с целью гарантировать должную работу, так что в случае отказа в процессе эксплуатации на устройство 17 управления полетом передают не модифицированный сигнал частоты вращения воздушного винта, такой как характеристика 100 с фиг.1.
В варианте реализации, проиллюстрированном на фиг.4, система изменения частоты вращения воздушного винта газотурбинного двигателя 20 и устройство 17 управления полетом идентичны системе, изображенной на фиг.2, за исключением того, что газотурбинный двигатель 20 с фиг.4 включает в себя электронное супервизорное управление, известное как управление режимом мощности (РМС) 22, а устройство 17 управления полетом с фиг.4 включает в себя дисплей 32 двигателя, обладающий по меньшей мере одним аналоговым и по меньшей мере одним цифровым вводом. FSMU 15 содержит выход, соединенный проводником 24 с дисплеем 32 двигателя, а также выход на РМС 22 через проводник 21. В зависимости от конкретного применения РМС выдает через проводник 23 или аналоговый, или цифровой сигнал на дисплей 32 двигателя. В этом предпочтительном варианте реализации дисплей двигателя 32 требует по меньшей мере двух входов индикации частоты вращения воздушного винта, один из которых обеспечивается РМС 22 и другой обеспечивается датчиком частоты вращения воздушного винта 11 (через FSMU 15 и проводник 24). В альтернативном варианте реализации полученный суммированный сигнал направляют по проводнику 21 на РМС 22, и в устройство управления полетом по проводнику 24, как изображено на фиг.4.
Хотя настоящее изобретение описано на примере предпочтительных вариантов реализации, специалистам в данной области техники должна быть очевидна возможность внесения в них изменений без отклонения от существа прилагаемых пунктов формулы изобретения, очерчивающих настоящее изобретение.
Изобретение относится к системе управления частотой вращения воздушного винта, позволяющей оператору управлять частотой вращения двигателя для согласования определенного показателя тяги с требующимся при полете. Изобретение согласует отклонения в показателе тяги, измеренные при изготовлении или капитальном ремонте двигателя. В одном из вариантов реализации изобретения предусматривается выдача на устройство управления полетом аналогового сигнала частоты вращения. Данная система может также быть скомпонована таким образом, чтобы выдавать на устройство управления режимом мощности цифровой сигнал. Такое выполнение системы позволит предотвратить количество двигателей, работающих с избыточной тягой. 2 н. и 8 з.п. ф-лы, 4 ил.
а) запоминающее устройство (13), предназначенное для хранения информации об уровне изменения частоты вращения воздушного винта в форме множества характеристик (100-110) изменения частоты вращения воздушного винта;
b) по меньшей мере один измеритель скорости (11), предназначенный для измерения в реальном времени частоты вращения газотурбинного двигателя и выдачи сигнала, представляющего частоту вращения в реальном времени;
с) идентификационный штекер (19), предназначенный для выбора из запоминающего устройства (13) сигнала характеристики (100-110) изменения частоты вращения воздушного винта; и
d) устройство (27) обработки сигнала, предназначенное для комбинирования сигнала характеристики (100-110) изменения частоты вращения воздушного винта и частоты вращения в реальном времени для генерирования сигнала модифицированной частоты вращения воздушного винта.
а) определение частоты вращения воздушного винта с помощью измерителя скорости (11) для выдачи сигнала частоты вращения воздушного винта в реальном времени;
b) выдача из запоминающего устройства (13) сигнала (100-110) заданного изменения частоты вращения;
с) суммирование сигнала частоты вращения воздушного винта в реальном времени и сигнала (100-110) заданного изменения частоты вращения для получения сигнала модифицированной частоты вращения воздушного винта.
Приоритет по пунктам:
| US 4313167 А, 26.01.1982 | |||
| УСТРОЙСТВО для ИЗГОТОВЛЕНИЯ БЕСКОНЕЧИБ1Х ШИРОКИХ АБРАЗИВНБ1Х ЛЕНТ | 0 |
|
SU358139A1 |
| US 4437303 А, 20.03.1984 | |||
| US 4104876 А, 08.08.1978 | |||
| US 4344141 А, 10.08.1982 | |||
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ТУРБОВИНТОВОЙ ДВИГАТЕЛЬНОЙ УСТАНОВКОЙ | 1991 |
|
RU2006633C1 |
| SU 1445321 А1, 10.10.1996. | |||

