Изобретение относится к устройствам управления высокой точности, работающим в условиях повышенных вибрационных нагрузок, преимущественно для авиационной и ракетной техники.
Известен гидроусилитель [1], включающий электромеханический преобразователь (ЭМП) с заслонкой на выходном валу, корпус с подводящими каналами, два установленных в резьбовых отверстиях корпуса по обе стороны заслонки соосно и с возможностью перемещения вдоль своей оси сопла, осевые каналы которых гидравлически связаны радиальными каналами с подводящими каналами корпуса, причем конец каждого сопла, противоположный заслонке, выполнен выступающим из корпуса и снабжен элементом регулировки положения сопла относительно заслонки.
Недостатком указанного устройства является нестабильность положения сопел относительно заслонки, а следовательно, непостоянство сопротивлений регулируемых дросселей, образуемых ими, при определенном электрическом сигнале на ЭМП, т.к. возможен люфт в резьбовом соединении между соплом и корпусом при воздействии вибрации.
Наиболее близким к предложенному устройству - прототипом является гидроусилитель [2], включающий ЭМП с заслонкой на выходном валу, корпус с подводящими каналами, два установленных в резьбовых отверстиях корпуса по обе стороны заслонки соосно и с возможностью перемещения вдоль своей оси сопла, осевые каналы которых гидравлически связаны радиальными каналами с подводящими каналами корпуса, причем конец каждого сопла, противоположный заслонке, выполнен выступающим из корпуса и снабжен элементом регулировки положения сопла относительно заслонки и фиксирующим элементом.
В указанном гидроусилителе фиксирующие элементы в виде контргаек устраняют перемещение сопел при вибрации, но устранение резьбового зазора при затяжке контргаек изменяет расстояние между соплом и заслонкой при определенном электрическом сигнале на ЭМП и требует многократного отворачивания контргаек и многократной подрегулировки указанного расстояния для его точного выставления с учетом затяжки контргаек. Недостатком указанной конструкции является недостаточная технологичность из-за нарушения отрегулированных расстояний между соплами и заслонкой при фиксации.
Техническим результатом настоящего изобретения является повышение технологичности путем выполнения безлюфтового соединения сопла и корпуса с возможностью последующей однократной регулировки зазора между соплом и заслонкой при обеспечении поджатия сопла к корпусу в процессе регулировки.
Технический результат достигается тем, что гидроусилитель, включающий ЭМП с заслонкой на выходном валу, корпус с подводящими каналами, два установленных в резьбовых отверстиях корпуса по обе стороны заслонки соосно и с возможностью перемещения вдоль своей оси сопла, осевые каналы которых гидравлически связаны радиальными каналами с подводящими каналами корпуса, причем конец каждого сопла, противоположный заслонке, выполнен выступающим из корпуса и снабжен элементом регулировки положения сопла относительно заслонки и фиксирующим элементом, в отличие от прототипа он снабжен двумя крышками, в каждой из которых выполнено отверстие для доступа к элементу регулировки положения сопла относительно заслонки, каждый фиксирующий элемент размещен на соответствующей крышке, конец каждого сопла, противоположный заслонке, снабжен буртом, между буртом и крышкой установлен узел поджатия сопла к корпусу, а сопла снабжены элементами компенсации поджатия. Для уменьшения усилия поджатия сопла при вывинчивании его из корпуса радиальные каналы сопел, связывающие подводящие каналы корпуса с собственным осевым каналом выполнены в виде плоских параллельных пазов, перпендикулярных оси сопла и смещенных вдоль нее, при этом элемент компенсации поджатия сопла выполнен посредством перемычек между пазами сопла, размещенных попарно по обе стороны от оси сопла с угловым смещением в проекции на плоскость, перпендикулярную этой оси.
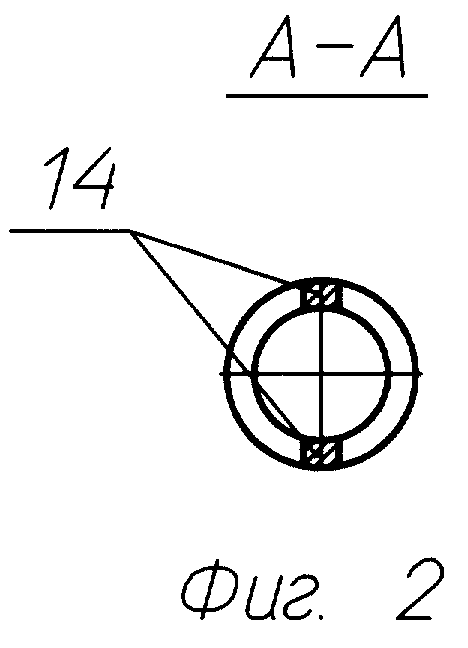
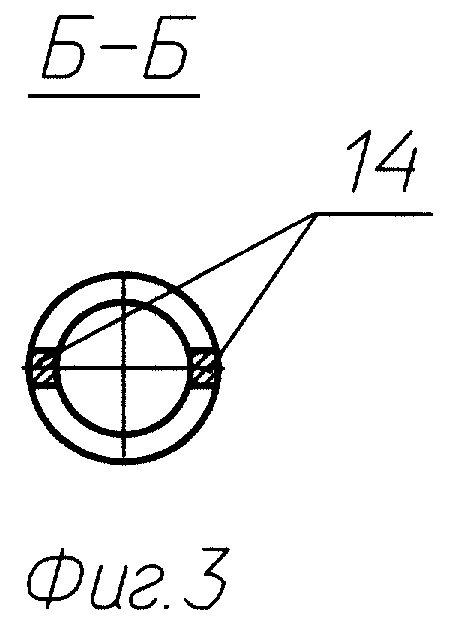
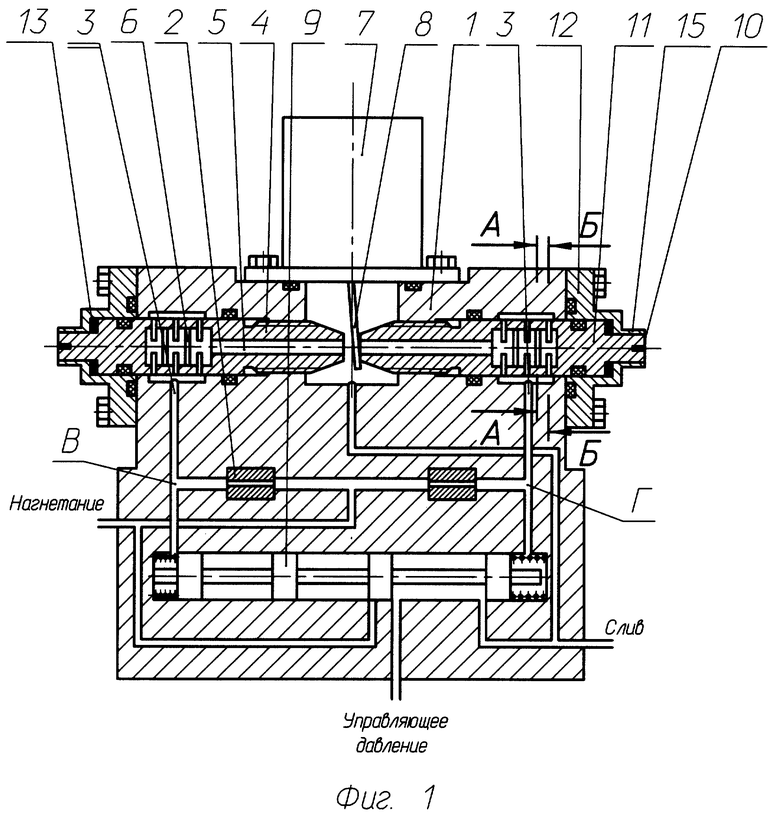
На фиг.1 представлена общая конструктивная схема двухкаскадного гидроусилителя, на фиг.2 и 3 представлены сечения сопла в плоскостях А и Б, проходящих через два соседних плоских параллельных паза, смещенных вдоль оси сопла.
Гидроусилитель включает в себя корпус 1 с двумя нерегулируемыми дросселями 2 и подводящими каналами 3, два сопла 4 с осевым каналом 5 и радиальными каналами 6, ЭМП 7 с заслонкой 8 в первом каскаде усиления и золотник 9 во втором каскаде усиления. Сопла выполнены подвижными относительно корпуса за счет выполнения резьбы в корпусе 1 и на наружной поверхности сопла 4. Гидроусилитель снабжен также элементами регулировки положения сопел относительно заслонки, включающих, например, шлиц 10 на торцовой поверхности сопла, противоположной заслонке. На этом же конце сопла 4 выполнен бурт 11, поджимаемый к корпусу 1 посредством крышки 12, т.к. в крышке диаметр отверстия для доступа к шлицу меньше диаметра отверстия под бурт. Между буртом 11 и крышкой 12 установлен узел поджатия сопла к корпусу, выполненный в виде набора шайб 13, причем сумма толщины набора шайб и расстояния от корпуса до торца бурта, противоположного заслонке, больше глубины отверстия крышки под бурт сопла. Радиальные отверстия 6 сопел 4 выполнены в виде плоских параллельных пазов, перпендикулярных оси сопла и смещенных вдоль нее. Пазы размещены попарно в каждой плоскости и образуют по две перемычки 14, являющиеся элементом компенсации поджатия при перемещении сопла 4 относительно корпуса 1, перемычки размещены в соседних плоскостях со смещением в проекции на плоскость, перпендикулярную оси сопла 4, оптимально на 90 градусов для уменьшения продольной жесткости сопла в зоне хвостовика, т.е. уменьшения усилия поджатия. На крышке 12 размещен фиксирующий элемент, выполненный в виде тонкостенного пояска 15, охватывающего конец сопла, противоположный заслонке 8, в зоне от бурта до торца с перекрытием шлица 10. При обжатии пояска 15 в шлиц 10 проворот и перемещение сопла 4 относительно корпуса 1 невозможны.
При подаче рабочей жидкости в магистрали нагнетания и слива корпуса 1 она через нерегулируемые дроссели 2 поступает в подводящие каналы 3, а затем поступает в каналы 5 сопел 4 через радиальные каналы 6, при этом между соплами 4 и заслонкой 8 ЭМП 7 образуются регулируемые дроссели. В зависимости от положения заслонки 8 возникает перепад давлений в полостях В и Г (при перемещении заслонки в сторону полости В давление в ней выше, чем в полости Г и наоборот перемещение заслонки в сторону полости Г повышает давление в последней по сравнению с полостью В), за счет перепада давлений происходит перемещение золотника 9, который сообщает управляющую полость либо с магистралью слива, либо с магистралью нагнетания. Быстродействие гидроусилителя определяется зазором между соплами 4 и заслонкой 8. Регулировка быстродействия осуществляется изменением положения сопел относительно заслонки путем вращения сопел 4 относительно корпуса 1 посредством шлицов 10 при обеспечении поджатия сопла к корпусу в процессе регулировки. Расстояние контролируется, например, мерным щупом, устанавливаемым между соплом и заслонкой. Поджатие сопла 4 к корпусу 1 для выборки зазора и безлюфтового соединения последних осуществляется посредством воздействия крышки 12 на бурт 11 через набор шайб 13. Усилие поджатия определяется толщиной набора шайб 13 и моментом затяжки болтов, крепящих крышку 12. Для предохранения от чрезмерных усилий, действующих на сопло при вывинчивании последнего из корпуса, гидроусилитель снабжен элементом компенсации поджатия. Перемещение сопла компенсируется уменьшением его длины за счет поджатия перемычек 14, образованных посредством выполнения радиальных каналов 6 в виде плоских параллельных пазов. Фиксация положения сопла 4 обеспечивается обжатием пояска 15 крышки 12 в шлиц 10 сопла 4.
Выполнение безлюфтового соединения сопла и корпуса с возможностью последующей однократной регулировки зазора между соплом и заслонкой при обеспечении поджатия сопла к корпусу в процессе регулировки повышает технологичность конструкции. Снабжение сопла элементом компенсации поджатия, выполненного в виде перемычек между плоскими параллельными пазами, перпендикулярными оси сопла и смещенными вдоль нее, размещенными попарно по обе стороны от оси сопла с угловым смещением в проекции на плоскость, перпендикулярную этой оси, уменьшает усилие, прилагаемое к соплу при регулировке.
Литература
1. Т.М.Башта и др. “Объемные гидравлические приводы”, Машиностроение, М., 1969 г., стр.374-375.
2. В.А.Хохлов “Электрогидравлический следящий привод”, Наука, М., 1966 г., стр.145-146.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИДРОУСИЛИТЕЛЬ | 2007 |
|
RU2347115C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ГИДРОУСИЛИТЕЛЯ | 2007 |
|
RU2347114C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ГИДРОУСИЛИТЕЛЯ | 2005 |
|
RU2293889C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ГИДРОУСИЛИТЕЛЯ | 2010 |
|
RU2446320C2 |
| Электрогидравлический усилитель | 1990 |
|
SU1756655A1 |
| ДВУХКАНАЛЬНЫЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ УСИЛИТЕЛЬ МОЩНОСТИ | 2013 |
|
RU2553588C1 |
| Ороситель | 1989 |
|
SU1728499A1 |
| СЕРВОКЛАПАН СО СТРУЙНЫМ УПРАВЛЕНИЕМ | 2011 |
|
RU2482341C1 |
| ГИДРАВЛИЧЕСКИЙ ИНЪЕКТОР | 1988 |
|
RU1630048C |
| ПНЕВМАТИЧЕСКИЙ ПРИВОД САЯПИНА И ЭЛЕКТРОПНЕВМАТИЧЕСКОЕ УПРАВЛЯЮЩЕЕ УСТРОЙСТВО | 1998 |
|
RU2131065C1 |
Гидроусилитель предназначен для устройств управления с высокой точностью. Гидроусилитель включает электромеханический преобразователь с заслонкой на выходном валу, корпус с подводящими каналами, два установленных в резьбовых отверстиях корпуса по обе стороны заслонки соосно и с возможностью перемещения вдоль своей оси сопла, осевые каналы которых гидравлически связаны радиальными каналами с подводящими каналами корпуса, причем конец каждого сопла, противоположный заслонке, выполнен выступающим из корпуса и снабжен элементом регулировки положения сопла относительно заслонки и фиксирующим элементом, при этом он снабжен двумя крышками, в каждой из которых выполнено отверстие для доступа к элементу регулировки положения сопла относительно заслонки, каждый фиксирующий элемент размещен на соответствующей крышке, конец каждого сопла, противоположный заслонке, снабжен буртом, между буртом и крышкой установлен узел поджатия сопла к корпусу, а сопла снабжены элементами компенсации поджатия. Технический результат - повышение точности управления. 1 з.п. ф-лы, 3 ил.
| ХОХЛОВ В.А | |||
| Электрогидравлический следящий привод | |||
| - М.: Наука, 1966, с.145-146 | |||
| БАШТА Т.М | |||
| Объемные гидравлические приводы | |||
| - М.: Машиностроение, 1969, с.374-375 | |||
| RU 2059899 С1, 10.05.1996 | |||
| US 4074527 A, 21.02.1978 | |||
| ОПТИЧЕСКИЙ МНОГОСЛОЙНЫЙ ПОЛОСНО-ПРОПУСКАЮЩИЙ ФИЛЬТР | 2013 |
|
RU2538078C1 |

