Изобретение относится к способу и устройству указанных в ограничительной части пунктов 1 и 6 формулы изобретения типов.
В линейных двигателях для подвижного состава на магнитной подвеске, в частности в синхронных длинностаторных линейных двигателях подвижных составов на магнитной подвеске, статорную обмотку обычно разделяют на короткие, например, длиной лишь около 1,2 км, и расположенные в направлении движения непосредственно друг за другом секции обмотки, которые электрически отделены друг от друга коммутационными стыками. Кроме того, параллельно пути движения проложен сравнительно длинный, например около 40 км, длинный секционный кабель, который подключен к так называемой подстанции, в которой установлены необходимые для снабжения электрическим током обмотки статора преобразователи или т.п. При этом для ограничения потребления энергии электроток подают только в ту секцию обмотки, в которой как раз находится подвижной состав, за счет того, что отдельные секции обмотки с помощью переключающих устройств по отдельности и друг за другом соединяют с секционным кабелем в соответствии с продвижением подвижного состава.
Проблемой такого известного способа короткого замыкания управления, важной для скорости подвижного состава, зависящей от подачи тока, является то, что при проезде коммутационного стыка только одна из примыкающих к этому коммутационному стыку секций обмотки может быть соединена с секционным кабелем, поскольку больше нельзя контролировать поток тока в секцию обмотки, и подвижной состав принимает ток таким образом, который соответствует короткому замыканию обмотки. Вследствие этого при каждой смене секции временно происходит изменение активной длины подвижного состава и тем самым уменьшение силы тяги, которая составляет, по меньшей мере, 50% и отрицательно влияет на комфортность движения.
Для предотвращения такого уменьшения силы тяги предложены многочисленные способы и устройства (например, из специальной публикации в ETZ, том 108, 1987, №9, страницы 1-24, DE 3917058 А1), которые известны под такими броскими названиями, как "способ козлиного прыжка", "способ переменного хода", "двойное питание", "разделение тока в зависимости от положения" и т.п. Однако для всех этих способов общим является то, что при прохождении коммутационного стыка или только в одну, или только в другую секцию обмотки подают ток и поэтому всегда активной является только часть транспортного двигателя. За счет этой зависимости активной части транспортного двигателя от положения подвижного состава в зоне коммутационного стыка до настоящего времени удавалось предотвращать уменьшение силы тяги только за счет того, что в подстанциях устанавливали избыточные мощности для покрытия возникающей при проезде коммутационного стыка повышенной потребности в ней, или предусматривали системы питания, имеющие по меньшей мере два секционных кабеля.
В противоположность этому, в основу изобретения положена задача так изменить способ и устройство указанного в начале типа, чтобы в зоне коммутационного стыка активным всегда оставался весь транспортный двигатель и чтобы создать новые возможности реализации секций статора, которые максимально не связаны с уменьшением силы тяги.
Решению этой задачи служат отличительные признаки пунктов 1 и 6 формулы изобретения.
Изобретение имеет то преимущество, что обе секции обмотки, задействованные в коммутационном стыке во время смены секции, постоянно соединены последовательно и через них проходит тот же ток. Поэтому, с одной стороны, практически не имеет значения положение подвижного состава относительно коммутационного стыка, а с другой стороны, возникают многочисленные новые возможности подачи тока при проезде коммутационного стыка.
Ниже приводится подробное описание изобретения на примере выполнения дороги на магнитной подвеске с длинностаторным линейным двигателем со ссылками на чертежи, на которых схематично изображено:
фиг.1 - разрез подвижного состава на магнитной подвеске и его пути движения;
фиг.2 - схема устройства согласно изобретению для эксплуатации подвижного состава на магнитной подвеске; и
фиг.3-8 - схема выполнения способа согласно изобретению, на основе нескольких примеров выполнения устройства согласно изобретению.
В дороге на магнитной подвеске с синхронным длинным статором (фиг.1) пакет 1 сердечника статора неподвижно соединен с проложенным вдоль заданной трассы путем 2 движения. В пазы пакета 1 статора вложена обмотка 3 длинного статора в виде трехфазной обмотки, которая снабжается от статического преобразователя трехфазным током переменной амплитуды и частоты, за счет чего известным образом образуется перемещающаяся волна линейной токовой нагрузки вдоль длинностаторного линейного двигателя. Поле возбуждения синхронного длинностаторного линейного двигателя формируется несущими магнитами 4, которые соединены с движущимся вдоль пути 1 и показанного на фиг.1 лишь схематично подвижного состава 5 и состоят из магнитного сердечника 6 и обмотки 7 возбуждения. Наряду с функцией магнитного поддерживания несущие магниты 4 одновременно создают поле возбуждения синхронного электродвигателя. Как правило, по обе стороны пути 2 движения установлено по одному пакету 1 сердечника статора с соответствующими, обычно трехфазными обмотками 3 длинного статора, а также предусмотрено множество несущих магнитов 4.
Для образования желаемой движущей силы необходимо, чтобы скорость подвижного состава была синхронна скорости распространения волны линейной токовой нагрузки. Максимальная движущая сила, соответственно сила тяги, обеспечивается при заданной амплитуде основной гармоники бегущей волны, когда выдерживается оптимальное относительное положение поля возбуждения поезда к бегущей волне, что в синхронном трехфазном двигателе соответствует выдерживанию оптимального угла выбега ротора. Это достигается посредством регулирования частоты инвертора, при этом в качестве опорных величин используют моментальную скорость подвижного состава и относительное положение несущих магнитов 4 к, например, фазе R обмотки длинного статора.
Для минимизации потребности в реактивной мощности и напряжении длинностаторного линейного двигателя активируют каждый раз только ту часть обмотки 3 длинного статора (фиг.2), по которой как раз движется подвижной состав 5, например, в направлении пути движения (стрелка  ). Для этого, как схематично показано на фиг.2, обмотка 3 длинного статора разделена на множество следующих непосредственно друг за другом в продольном направлении пути движения секций 3.1-3.9 обмотки, которые через соответствующее коммутационное устройство 8 могут быть соединены с секционным кабелем 9. На фиг.2 это относится как раз к секции 3.4 обмотки. Концы секционного кабеля 9 соединены с соответствующей подстанцией 10А, соответственно, 10В (двойное питание), в которых установлены необходимые для подачи тока в секции 3.1-3.9 обмотки устройства, в частности, статические преобразователи или т.п. Подстанции 10А, 10В могут быть с помощью других коммутационных устройств 11 соединены с соответствующим другим проложенным вдоль пути движения секционным кабелем 12, соответственно, 13, когда подвижной состав 5 еще не въехал на участок пути, заданный подстанциями 10А, 10В, соответственно, секционным кабелем 9, или когда он покидает его.
). Для этого, как схематично показано на фиг.2, обмотка 3 длинного статора разделена на множество следующих непосредственно друг за другом в продольном направлении пути движения секций 3.1-3.9 обмотки, которые через соответствующее коммутационное устройство 8 могут быть соединены с секционным кабелем 9. На фиг.2 это относится как раз к секции 3.4 обмотки. Концы секционного кабеля 9 соединены с соответствующей подстанцией 10А, соответственно, 10В (двойное питание), в которых установлены необходимые для подачи тока в секции 3.1-3.9 обмотки устройства, в частности, статические преобразователи или т.п. Подстанции 10А, 10В могут быть с помощью других коммутационных устройств 11 соединены с соответствующим другим проложенным вдоль пути движения секционным кабелем 12, соответственно, 13, когда подвижной состав 5 еще не въехал на участок пути, заданный подстанциями 10А, 10В, соответственно, секционным кабелем 9, или когда он покидает его.
Кроме того, в действительности обмотка 3 длинного статора состоит не только из секций 3.1-3.9 обмотки, но также из других соответствующих секций обмотки, которые соединены, например, с секциями 3.1-3.9 обмотки в схемы звезды, имеющими нейтрали 14.1, 14.2 и т.д., для получения обычной трехфазной системы с фазами R, S и Т.
Поскольку эти дополнительные секции обмотки необязательны для понимания изобретения, то они для упрощения изображения не показаны на фиг.2.
Показанные на фиг.2 секции 3.1-3.9 обмотки как правило служат для привода одной, например, правой стороны подвижного состава 5. Соответствующие секции 15.1, 15.2 обмотки, коммутационные устройства 16 и 17, подстанции 18А, 18В и секционные кабели 19, 20 и 21 служат для привода соответствующим образом левой стороны подвижного состава. При этом секции 3.1-3.9 обмотки сдвинуты относительно секций 15.1-15.9 обмотки предпочтительно, по меньшей мере, на длину подвижного состава в направлении  , для обеспечения возможности применения так называемого способа переменного шага. Он состоит в том, что коммутационные устройства 8, соответственно, 16 приводят в действие тогда, когда коммутационный стык 22, 23 между двумя расположенными друг за другом секциями обмотки находится примерно в середине подвижного состава. Кроме того, на практике соответствующие друг другу подстанции 10А, 18А, соответственно, 10В, 18В объединены в один расположенный у подвижного состава узел. Секции 15.1-15.9 обмотки ведут к нейтралям 24.1-24.9.
, для обеспечения возможности применения так называемого способа переменного шага. Он состоит в том, что коммутационные устройства 8, соответственно, 16 приводят в действие тогда, когда коммутационный стык 22, 23 между двумя расположенными друг за другом секциями обмотки находится примерно в середине подвижного состава. Кроме того, на практике соответствующие друг другу подстанции 10А, 18А, соответственно, 10В, 18В объединены в один расположенный у подвижного состава узел. Секции 15.1-15.9 обмотки ведут к нейтралям 24.1-24.9.
Для управления описанной дорогой на магнитной подвеске служит регулятор 25 скорости, соответственно, тока, к которому через линию 26 подают заданное значение скорости подвижного состава 5, подлежащей установлению или поддержанию, и через линию 27 передаваемый, например, по радио с подвижного состава 5 сигнал текущего положения. Заданные значения скорости хранятся в запоминающем устройстве 28 заданных значений, в которое подают также сигнал положения и которое выдает для каждой проезжаемой секции обмотки заданные значения скорости или тока.
Регулятор тока, к которому по линии 27 также подводят сигналы положения, подает на выходы 25А, 25В заданные значения, которые состоят, например, из заданных значений напряжения и подаются в подстанции 10А, 10В для создания в них подлежащих подаче в секционные кабели напряжений, соответственно, токов, необходимых для достижения номинальной скорости. Другие выходы 25С, 25D выдают соответствующие сигналы для подстанций 18А, 18В. С помощью определяемого в подвижном составе 5 сигнала действительной скорости, который появляется в линии 29, регулятор 25 скорости проверяет выдерживание заданной номинальной скорости. Вместо регулирования напряжения в подстанциях можно проводить также регулирование тока. Соединенные с выходом 25А, согласно фиг.2, блоки будут описаны ниже.
Также на фиг.2 показано соединенное с линией 27 управляющее устройство 30, с помощью которого управляют различными коммутационными устройствами 8, 11, 16 и 17 в зависимости от действительного положения подвижного состава 5 в направлении  , так что, с одной стороны, всегда с различными секционными кабелями соединяются только как раз проезжаемые секции обмотки и соответствующие подстанции, и с другой стороны, различные секции обмотки соединяются друг с другом характерным для изобретения образом, как будет подробно описано ниже.
, так что, с одной стороны, всегда с различными секционными кабелями соединяются только как раз проезжаемые секции обмотки и соответствующие подстанции, и с другой стороны, различные секции обмотки соединяются друг с другом характерным для изобретения образом, как будет подробно описано ниже.
Устройства описанного типа и их функции широко известны по публикациям DE-OS 2932764 A1, DE 3303961 A1, DE 3917058 A1, а также специальной публикации в ETZ, том 108, 1987, №9, страницы 1-24, содержание которых для избежания повторов включается в данное описание.
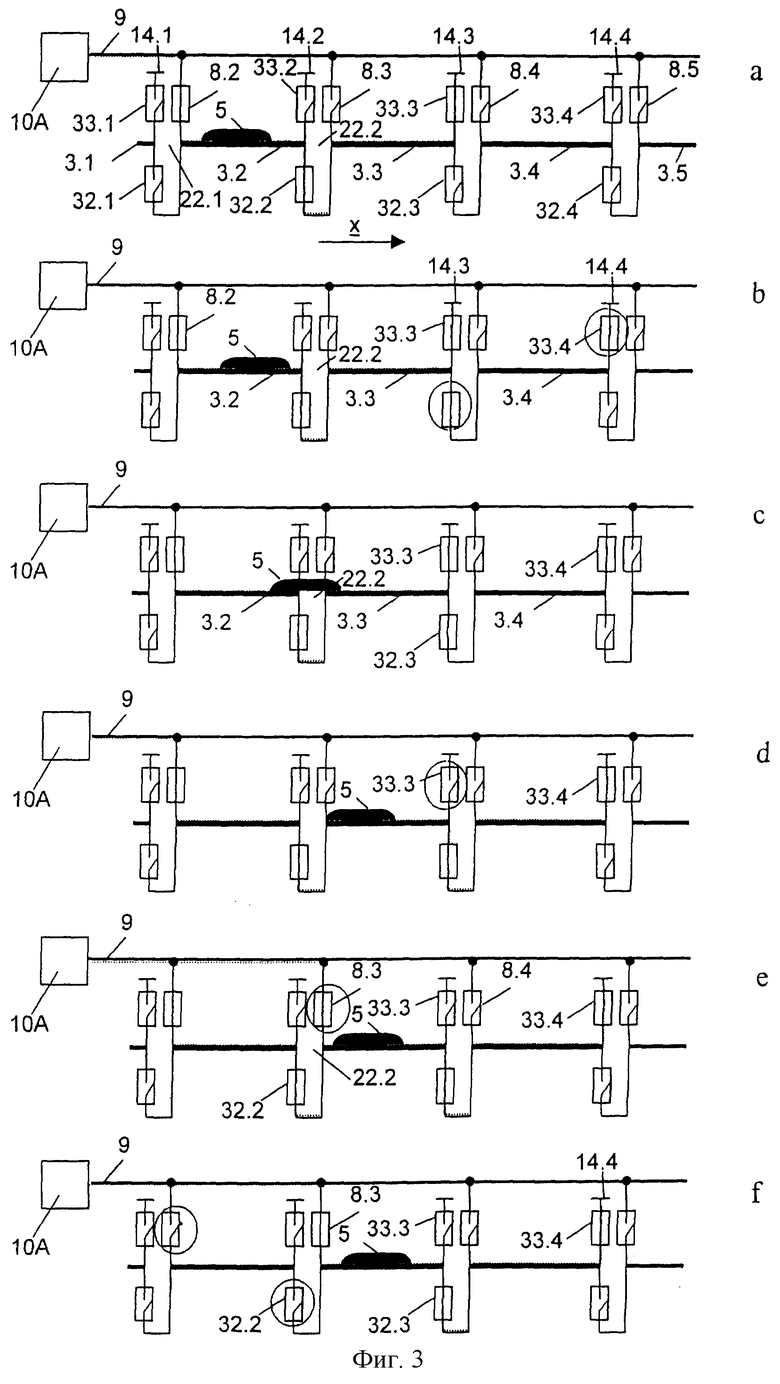
На фиг.3 показан считающийся до настоящего времени лучшим вариант выполнения изобретения, при этом, однако, для упрощения понимания изображены только подвижной состав 5, с толстыми линиями секций 3.1-3.5 обмотки, соединенными в направлении  движения с началом соответствующей секции обмотки, действующие в качестве выключателей питания первые коммутационные устройства 8.2-8.5 и секционный кабель 9, который здесь для простого питания соединен только с подстанцией 10А. При этом отдельные секции 3.1-3.5 обмотки электрически отделены друг от друга с помощью схематично обозначенных коммутационных стыков 22.1-22.4. В исходном положении, согласно фиг.3а, только коммутационное устройство 8.2 находится в замкнутом состоянии. Управляющее устройство 30 (фиг.2) на фиг.3 не показано.
движения с началом соответствующей секции обмотки, действующие в качестве выключателей питания первые коммутационные устройства 8.2-8.5 и секционный кабель 9, который здесь для простого питания соединен только с подстанцией 10А. При этом отдельные секции 3.1-3.5 обмотки электрически отделены друг от друга с помощью схематично обозначенных коммутационных стыков 22.1-22.4. В исходном положении, согласно фиг.3а, только коммутационное устройство 8.2 находится в замкнутом состоянии. Управляющее устройство 30 (фиг.2) на фиг.3 не показано.
Согласно изобретению на фиг.3 предусмотрены вторые коммутационные устройства 32.1-32.4, которые можно назвать также удлинительными переключателями, поскольку с их помощью можно электрически соединять друг с другом две расположенные в направлении  движения непосредственно друг за другом секции обмотки, как это показано на фиг.3а для секций 3.2 и 3.3 обмотки. Остальные секции обмотки не соединены электрически последовательно, поскольку только коммутационное устройство 32.2 находится в замкнутом состоянии.
движения непосредственно друг за другом секции обмотки, как это показано на фиг.3а для секций 3.2 и 3.3 обмотки. Остальные секции обмотки не соединены электрически последовательно, поскольку только коммутационное устройство 32.2 находится в замкнутом состоянии.
Кроме того, на фиг.3 предусмотрены третьи коммутационные устройства 33.1-33.4, которые можно назвать также переключателями нейтрали, так как с их помощью можно соединять концы секций 3.1-3.4 обмотки с соответствующим нейтралями 14.1 -14.4. На фиг.3а это относится к секции 3.3 обмотки, в то время как все другие нейтрали 14 разомкнуты.
При применении устройства, согласно фиг.3, предпочтительно используют, согласно изобретению, следующий способ.
Исходя из исходного состояния, согласно фиг.3а, в котором коммутационные устройства 8.2, 32.2 и 33.3 находятся в замкнутом состоянии, цепь тока проходит от секционного кабеля 9 к секции 3.2 обмотки, оттуда через коммутационное устройство 32.2 и с шунтированием коммутационного стыка 22.2 к следующей секции 3.3 обмотки и оттуда, наконец, к нейтрали 14.3. Тем самым секции 3.2 и 3.3 обмотки соединены электрически последовательно. Подвижной состав 5 как раз находится в секции 3.2 обмотки.
Когда поезд 5 приближается к коммутационному стыку 22.2 (фиг.3b), то в замкнутое состояние дополнительно приводят второе и третье коммутационные устройства 32.3 и 33.4, как показано на фиг.3b кружками. За счет этого с шунтированием коммутационного стыка 22.3 электрически соединяют последовательно также расположенные друг за другом секции 3.3 и 3.4 обмотки, хотя это последовательное соединение за счет еще замкнутого третьего коммутационного устройства 33.3 сначала остается не задействованным, поскольку секция 3.4 обмотки имеет значительно большее сопротивление по сравнению с ведущей к нейтрали 33.3 линией.
При дальнейшем движении подвижной состав 5 проходит коммутационный стык 22.2 (фиг.3с), однако, при этом весь двигатель подвижного состава остается постоянно активным, так как через обе соответствующие секции 3.2 и 3.3 обмотки проходит ток.
После того как подвижной состав 5 полностью переедет коммутационный стык 22.2 (фиг.3d), в открытое состояние переводят третье, обведенное кружком коммутационное устройство 33.3, за счет чего становится полностью действующим последовательное соединение, образованное из трех секций 3.2, 3.3 и 3.4 обмотки.
На следующей стадии (фиг.3е) переводят в замкнутое состояние первое коммутационное устройство 8.3 для непосредственного подключения начала секции 3.3 обмотки к секционному кабелю 9, за счет чего часть тока временно проходит еще и через секцию 3.2 обмотки. При этом часть тока, которая через секционный кабель 9 проходит в секцию 3.3 обмотки, из-за сравнительно небольшого полного сопротивления секционного кабеля 9 значительно больше, чем проходящая через секцию 3.2 обмотки часть тока. Подвижной состав 5 еще находится в секции 3.3 обмотки.
Наконец, на последней стадии способа (фиг.3f) переводят первое коммутационное устройство 8.2 и второе коммутационное устройство 32.2 в разомкнутое состояние. За счет этого прерывается последовательное соединение секций 3.2 и 3.3 обмотки. Подвижной состав 5 находится еще в секции 3.3 обмотки. Поэтому в конечном положении, согласно фиг.3f, создается относительно секций 3.3 и 3.4 то же состояние, которое показано на фиг.3а для секций 3.2 и 3.3 обмотки.
При последующем движении подвижного состава 5 соответственно повторяются описанные стадии способа. За счет этого в зависимости от установки коммутационных устройств 8, 32 и 33 две или три расположенные друг за другом в направлении движения секции обмотки соединяются последовательно, в результате чего образуются соответствующие изменения суммы приходящихся на задействованные секции обмотки или секционного кабеля полных сопротивлений. Если все секции обмотки имеют одинаковые полные сопротивления, а доля сопротивления секционного кабеля мала, то изменение полного сопротивления составляет каждый раз около 33%, что связано с соответствующим уменьшением тока, соответственно, с соответствующим увеличением тока.
Описанные применительно к фазе R на фиг.3 коммутационные устройства соответственно имеются в обеих других фазах.
Поскольку изменения тока, соответственно, силы тяги, вызванные изменениями на 33% полного сопротивления, не равны 33%, а меньше, то изменения силы тяги в зоне коммутационных стыков являются в целом относительно небольшими, так что их можно легко компенсировать за счет придания соответственно незначительных избыточных размеров подстанции 10А. Во всяком случае преимуществом является то, что в зоне коммутационного стыка 22 не происходит прерывания тока, весь электродвигатель подвижного состава остается активным и требуются только один секционный кабель 9 и одна подстанция 10А для достижения при проезде коммутационного стыка аналогичных изменений состояния, которые до настоящего времени можно было достичь только с помощью известных способов козлиного прыжка или способа переменного хода, т.е. с помощью двух секционных кабелей и двух подстанций. На основании показанных на фиг.3, характерных для изобретения последовательностей коммутации секций обмотки, способ, согласно изобретению, называется способом частичного хода.
Если в подстанциях 10А может быть обеспечена соответствующая высокая мощность (в частности, напряжение), что, например, при небольших скоростях в местном сообщении вследствие небольшого в целом потребления мощности не является проблематичным, то можно, как показано на фиг.4, где одинаковые части обозначены одинаковыми с фиг.3 позициями, включать последовательно максимально две расположенные друг за другом в направлении  движения секции обмотки.
движения секции обмотки.
Фиг.4а - 4с соответствуют фиг.3а - 3с, при этом из-за замкнутой нейтрали 14.3 секция 3.4 обмотки, так же, как и на фиг.3, практически не влияет на общее полное сопротивление последовательного соединения, образованного из секций 3.2 и 3.3 обмотки.
Когда подвижной состав 5 проедет коммутационный стык 22.2, согласно фиг.4d, то в этом варианте выполнения в отличие от фиг.3d коммутационное устройство 8.3 переводят в замкнутое состояние, за счет чего практически шунтируется еще подключенная секция 3.2 обмотки. В этом случае из-за небольшого полного сопротивления подключенного участка секционного кабеля ток проходит практически только через секцию 3.3 обмотки. При дальнейшем движении подвижного состава 5 переводят в разомкнутое состояние сначала коммутационные устройства 8.2 и 32.2 (фиг.4е), за счет чего секция 3.2 обмотки отключается от последовательного соединения. Далее как показано на фиг.4f, переводят в разомкнутое состояние коммутационное устройство 33.3, за счет чего нейтраль 14.3 размыкается и для секций 3.3 и 3.4 обмотки образуется состояние, показанное на фиг.4а для секций 3.2 и 3.3 обмотки. Таким образом, приведение в действие коммутационных устройств в примере, согласно фиг.4, приводит к изменению сопротивления на около 50%, так что подстанции 10А должны иметь соответственно более высокую мощность для показанного на фиг.4d состояния.
На фиг.5 показан пример выполнения, в котором с помощью одного секционного кабеля 9 и одной подстанции 10А, а в остальном аналогично фиг.2, снабжают током несколько секций 3.1-3.3, соответственно 15.1-15.3 двух расположенных рядом друг с другом обмоток длинного статора.
В примере выполнения, согласно фиг.5, дополнительно к коммутационным устройствам 8.1-8.3 и 32.1, 32.2 предусмотрены вторые коммутационные устройства 35.1 и 35.2, соответствующие коммутационным устройствам 32 и предназначенные для соединения секций 15.1-15.3 обмотки, а также четвертые коммутационные устройства 36.1, 36.2, с помощью которых можно соединять друг с другом две расположенные рядом друг с другом и попарно соответствующие друг другу секции 3.1, 15.1, соответственно, 3.2, 15.2 обмотки и т.д., причем эти соединения выполнены на передних концах секций обмотки в направлении  движения. Поэтому коммутационные устройства 36 можно рассматривать, например, как последовательные переключатели, коммутационные устройства 16 и 33, а также соответствующие нейтрали 14 (фиг.3, 4) отсутствуют. Вместо них предусмотрены третьи коммутационные устройства 37.1, 37.2 и т.д., которые включены между секциями 15.1 и т.д. обмотки и соответствующими нейтралями 24.1 и т.д., которые подключены к задним в направлении
движения. Поэтому коммутационные устройства 36 можно рассматривать, например, как последовательные переключатели, коммутационные устройства 16 и 33, а также соответствующие нейтрали 14 (фиг.3, 4) отсутствуют. Вместо них предусмотрены третьи коммутационные устройства 37.1, 37.2 и т.д., которые включены между секциями 15.1 и т.д. обмотки и соответствующими нейтралями 24.1 и т.д., которые подключены к задним в направлении  движения концам секций 15.1 и т.д. обмотки.
движения концам секций 15.1 и т.д. обмотки.
Как показано на фиг.5а, подвижной состав 5 находится своей левой, соответственно правой, половиной электродвигателя на расположенных рядом друг с другом секциях 3.1 и 15.1. Коммутационные устройства 8.1, 32.1, 36.2, 35.1 и 37.1 находятся в замкнутом состоянии, остальные коммутационные устройства - в разомкнутом состоянии. Поэтому поступающий с подстанции 10А ток проходит последовательно через первое коммутационное устройство 8.1, расположенную за ним секцию 3.1 обмотки и затем с шунтированием коммутационного стыка 22.1 коммутационное устройство 32.1 и секцию 3.2 обмотки, коммутационное устройство 36.2 и секцию 15.2 обмотки. После этого с помощью коммутационного устройства 35.1 шунтируют коммутационный стык 23.1 и далее ток проходит через секцию 15.1 обмотки и коммутационное устройство 37.1 к нейтрали 24.1. Таким образом, аналогично фиг.3 и 4, две расположенные друг за другом секции, а именно 3.1, 3.2 с одной стороны, и 15.2, 15.1 с другой стороны, соединяют электрически последовательно, при этом дополнительно оба расположенных рядом друг с другом последовательных соединения 3.1, 3.2 и 15.2, 15.1 с помощью коммутационного устройства 36.2 соединяют электрически последовательно.
Когда подвижной состав 5 при дальнейшем движении приближается к коммутационным стыкам 22.1, 23.1, то размыкают коммутационное устройство 36.2, в то время как коммутационные устройства 32.2, 35.2 и 36.3 переводят в замкнутое состояние, так что в этом случае, аналогично фиг.3, электрически последовательно соединены по три расположенных друг за другом секции 3.1-3.3, соответственно 15.3-15.1 обмотки и дополнительно к этому с помощью коммутационного устройства 36.3 оба расположенных рядом друг с другом последовательных соединения включают последовательно. Если подвижной состав 5 прошел коммутационные стыки 22.1, 23.1 (фиг.5с), то с одной стороны, размыкают коммутационное устройство 37.1 и замыкают коммутационное устройство 37.2 для размыкания нейтрали 24.1 и замыкания нейтрали 24.2. С другой стороны, замыкают коммутационное устройство 8.2 и размыкают вторые коммутационные устройства 8.1, 32.1 и 35.1 (фиг.5d) для отсоединения секций 3.1, 15.1 обмотки от последовательных соединений. Достигнутое конечное состояние соответствует для секций 3.2, 3.3 обмотки, соответственно 15.2, 15.3 показанному на фиг.5а исходному состоянию секций 3.1, 3.2, соответственно, 15.1, 15.2. Это означает, что так же, как на фиг.3, две или три секции обмотки на каждой стороне двигателя соединены последовательно. Если при этом, что не показано на фиг.5, коммутационные стыки смещены относительно друг друга, по меньшей мере, на длину подвижного состава в направлении  движения (способ переменного хода), то вызванное изменением полного сопротивления уменьшение силы тяги составляет максимально 16,7%. В этом примере также предусмотрены соответствующие коммутационные устройства для обеих других фаз.
движения (способ переменного хода), то вызванное изменением полного сопротивления уменьшение силы тяги составляет максимально 16,7%. В этом примере также предусмотрены соответствующие коммутационные устройства для обеих других фаз.
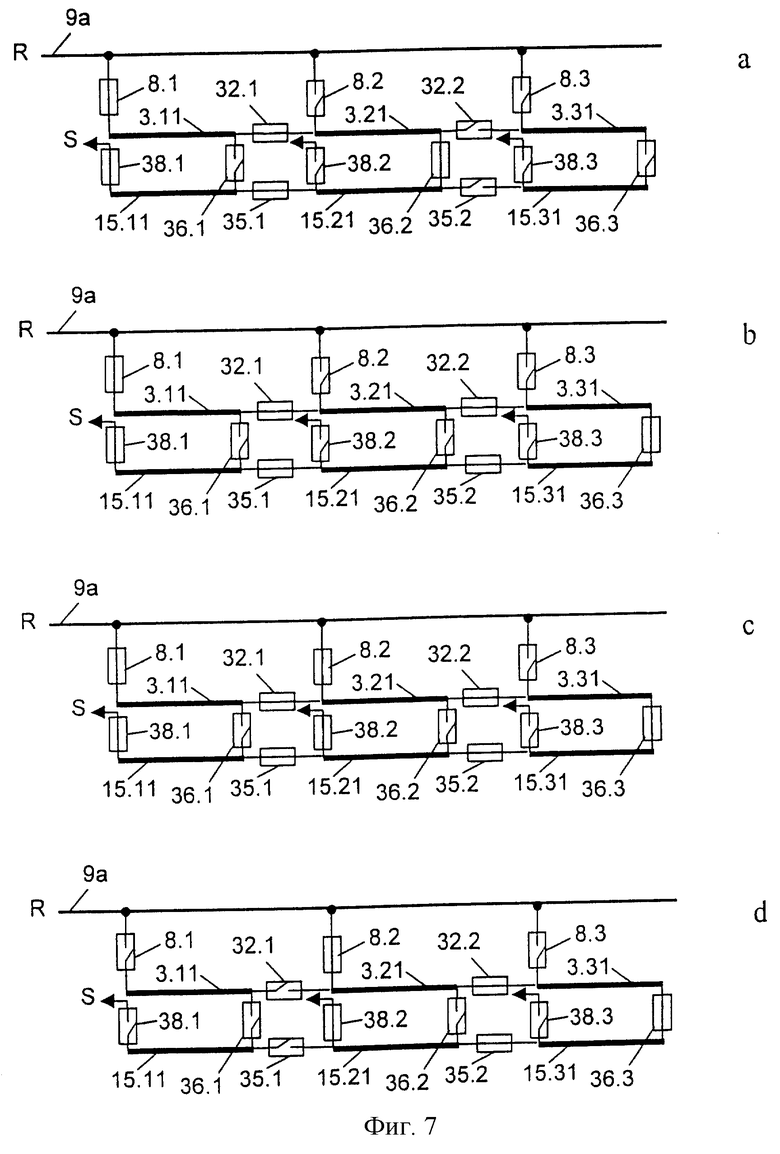
Другой пример выполнения изобретения показан на фиг.6 и 7, согласно которому секции обмотки соединены не по схеме звезды, а по трехфазной схеме треугольника. В соответствии с этим, как показано для всех трех фаз только на фиг.6, для фаз R, S и Т предусмотрены три секционных кабеля 9а, 9b и 9с и соответственно для каждой стороны электродвигателя предусмотрено по три левых, соответственно, правых секций 3.11 (R), 3.12 (S), 3.13 (Т) и т.д., соответственно, 15.11 (R), 15.12 (S) и 15.13 (Т) и т.д. Кроме того, на фиг.6 схематично показаны два коммутационных стыка 22.1 и 22.2, к каждому из которых, аналогично фиг.3, относятся первое коммутационное устройство 8, второе коммутационное устройство 32, 35 для левой, соответственно, правой секции обмотки, четвертое коммутационное устройство 36 для соединения двух смежных друг с другом секций обмотки и пятое коммутационное устройство 38, которые можно назвать переключателями треугольника. Все коммутационные устройства предпочтительно выполнены в виде трехполюсных, одновременно приводимых в действие переключателей. Если в этом варианте выполнения необходимо, например, подать ток в секции 3.21-3.23 и 15.21-15.23, то необходимо в коммутационном стыке 22.1 перевести коммутационные устройства 8 и 38 и в коммутационном стыке 22.2 коммутационное устройство 36 в замкнутое состояние, а все другие коммутационные устройства - в разомкнутое состояние. За счет этого секционный кабель 9а через замкнутое коммутационное устройство 8, секцию 3.21 обмотки, замкнутое коммутационное устройство 36, секцию 15.21 обмотки и замкнутое коммутационное устройство 38 соединяется с началом секции 3.22 обмотки (соединение фаз R и S). Соответственно, секционный кабель 9b соединяют с началом секции 3.23 обмотки (соединение фаз S и Т), а секционный кабель 9с - с началом секции 3.21 обмотки (соединение фаз Т и R), как это характерно для схемы треугольника.
На фиг.7а - 7d показаны поэтапные переключения, согласно изобретению, секций обмотки при применении схемы треугольника, согласно фиг.6, причем показана только одна фаза с секционным кабелем 9а (фаза R) и секции 3.11-3.31, соответственно, 15.11-15.31 обмотки. Аналогично фиг.3, коммутационные устройства 8, 32, 35, 36 и 38 приводят в действие так, что в показанном на фиг.7а исходном состоянии соответствующие две расположенные друг за другом секции 3.11, 3.21, соответственно, 15.11, 15.21 соединены последовательно, причем коммутационное устройство 36.2 одновременно соединяет оба расположенных рядом друг с другом последовательных соединения левой и правой половины электродвигателя, а коммутационное устройство 38.1, аналогично фиг.6, соединяет секционный кабель 9а (фаза R) со схематично обозначенной фазой S. При приближении не изображенного подвижного состава к следующему коммутационному стыку между секциями 3.11, 3.21, соответственно 15.11, 15.21 к этому последовательному соединению подключают соответствующие третьи секции 3.31 и 15.31 обмотки. Как показано на фиг.7с, в этом случае включено коммутационное устройство 8.2 и за счет этого, аналогично фиг.3е, секционный кабель 9а включен параллельно секциям 3.11, 15.11 обмотки. В показанном на фиг.7d состоянии снова восстановлены аналогичные фиг.7а соотношения для последовательных соединений секций 3.21, 3.31 обмотки, соответственно, 15.21, 15.31.
Далее на фиг.8 показано соединение по схеме звезды с работающими параллельно секциями обмотки для одной фазы. В этом примере выполнения изобретения к обоим концам секционного кабеля 9 подключена одна из подстанций 10А, соответственно, 10В, а сам секционный кабель 9 с помощью дополнительных коммутационных устройств 41.1-41.3 разделен на отдельные участки. Аналогично фиг.3-7, в исходном состоянии (фиг.8а) коммутационное устройство 41.1 находится в разомкнутом состоянии, в то время как все расположенные в направлении  движения перед ним коммутационные устройства 41.2, 41.3 и т.д. находятся в замкнутом состоянии. Кроме того, ток с подстанции 10А подается параллельно в соответствующие последовательно соединенные секции 3.1, 3.2, соответственно, 15.1, 15.2, потому как четвертые коммутационные устройства 36 в этом случае соединяют между собой задние в направлении
движения перед ним коммутационные устройства 41.2, 41.3 и т.д. находятся в замкнутом состоянии. Кроме того, ток с подстанции 10А подается параллельно в соответствующие последовательно соединенные секции 3.1, 3.2, соответственно, 15.1, 15.2, потому как четвертые коммутационные устройства 36 в этом случае соединяют между собой задние в направлении  движения концы секций 3.1, 15.1, соответственно, 3.2, 15.2 и т.д. обмотки. В конце этих последовательных соединений ток через коммутационные устройства 8.3 и 41.3 подводят к расположенной в подстанции 10В нейтрали. В качестве альтернативного решения, нейтраль может быть выполнена также в подстанции 10А, причем в этом случае на фиг.8 правый конец секционного кабеля 9 необходимо вернуть в подстанцию 10А. В остальном, показанные на фиг.8b, 8с и 8d состояния образуются из положений коммутационных устройств аналогично фиг.3-7.
движения концы секций 3.1, 15.1, соответственно, 3.2, 15.2 и т.д. обмотки. В конце этих последовательных соединений ток через коммутационные устройства 8.3 и 41.3 подводят к расположенной в подстанции 10В нейтрали. В качестве альтернативного решения, нейтраль может быть выполнена также в подстанции 10А, причем в этом случае на фиг.8 правый конец секционного кабеля 9 необходимо вернуть в подстанцию 10А. В остальном, показанные на фиг.8b, 8с и 8d состояния образуются из положений коммутационных устройств аналогично фиг.3-7.
В другом примере выполнения изобретения соединение по схеме звезды может предусматривать, что оба расположенных рядом друг с другом последовательные соединения, из левых и правых секций обмотки, работают не параллельно, как показано на фиг.8, а последовательно, как показано на фиг.5.
Показанный на фиг.8 вариант выполнения может быть дополнен тем, что каждый участок секционного кабеля снабжен двумя коммутационными устройствами вместо только одного коммутационного устройства 41.1-41.3, при этом эти коммутационные устройства предпочтительно расположены в начале и в конце каждого участка секционного кабеля. В этом случае возможно с помощью других описанных коммутационных устройств обходить дефектный участок секционного кабеля, так что только в зоне между двумя соответствующими коммутационными стыками происходит незначительное уменьшение силы тяги. Тот же эффект можно обеспечить с помощью двух секционных кабелей, если они в каждом коммутационном стыке соединены друг с другом другими коммутационными устройствами. Такое решение имеет дополнительное преимущество, состоящее в том, что через каждый секционный кабель можно подавать половину мощности, так что при выходе из строя всего кабеля не выходит полностью из строя соответствующая часть электродвигателя. Таким образом, с помощью описанных коммутационных устройств можно в значительной степени снижать действие дефектных секций обмотки за счет того, что благодаря подходящему подключению коммутационных устройств при описанном поэтапном переключении их можно обходить.
Описанные примеры выполнения, с одной стороны, предусматривают, что для поддержания номинального тока при переходе с одной на две, соответственно, с двух на три секции обмотки имеется достаточный резерв напряжения. С другой стороны, при отключении секции обмотки необходимо предотвратить превышение критического порогового значения тока вследствие уменьшения полного сопротивления, например, в результате инерционности работающих регуляторов тока, так как это может приводить к повреждению приводного двигателя. Поэтому изобретение предусматривает, согласно фиг.2, дополнительное схемное устройство в виде стабилизатора напряжения, которое приводится в действие во время показанных на фиг.3-8 переключении. Для этого выход обычного регулятора 25 скорости, соответственно, тока через избирательный элемент 40 подводят ко входу соответствующей, соединенной с секционным кабелем 9 подстанции 10А. Кроме того, предусмотрено устройство 41 управления процессом, которое со стороны входа соединено, например, с линией 27 (фиг.2), через которую подводится сигнал действительного положения подвижного состава 5, и которое, кроме того, создает на выходе управляющие сигналы для избирательного элемента 40 и запоминающего устройства 42, которое имеет другие входы, соединенные с выходами 25A-25D регулятора тока, и выходы, соединенные с избирательным элементом 40.
Это устройство 41 управления процессом работает следующим образом.
При нормальном движении подвижного состава 5 внутри любой секции обмотки избирательный элемент 40 соединяет выходы 25A-25D регулятора тока с подстанцией 10А, 10В, соответственно, 18А, 18В. Перед въездом подвижного состава 5 на коммутационный стык, т.е. до приведения в действие первого коммутационного устройства (например, коммутационного устройства 32.3 на фиг.3), устройство 41 управления процессом выдает управляющий сигнал, в результате чего соответствующие выходы 25A-25D регулятора тока соединяются с соответствующими другими входами запоминающего устройства 42, и одновременно соответствующие входы избирательного элемента 40 соединяются с соответствующими выходами запоминающего устройства 42. За счет этого запоминающее устройство 42 принимает заданное значение, появляющееся в этот момент времени на соответствующем выходе 25A-25D регулятора тока, и запоминает его. Одновременно запоминающее устройство 42 через избирательный орган 40 соединяется с соответствующей подстанцией 10А-18В, так что на нее подается внесенное в память заданное значение. Это состояние сохраняется так долго, пока подвижной состав 5 не пройдет соответствующий коммутационный стык и не достигнет, например, конечного состояния, согласно фиг.3f. В этот момент времени устройство 41 управления процессом выдает управляющий сигнал, который отсоединяет запоминающее устройство 42 от избирательного элемента 40 и соединяет регулятор тока снова непосредственно с подстанцией 10А-18В. За счет этого обеспечивается значительное преимущество, состоящее в том, что в зоне коммутационных стыков в подстанциях создается постоянное напряжение, и регулятор тока не действует. Поэтому описанные выше уменьшения полного сопротивления не могут приводить к нежелательным увеличениям тока и тем самым к повреждениям электродвигателя. Вместо этого во время увеличения полного сопротивления происходит незначительное уменьшение тока. Постоянное напряжение можно создавать также с помощью других устройств, например, с помощью автономных вычислений.
Изобретение не ограничивается описанными примерами выполнения, которые могут быть изменены различным образом. Это относится, в частности, к описанным применительно к фиг.3-8 примерам выполнения, которые можно варьировать в широких пределах, в частности, относительно выполнения и последовательности управления различными коммутационными устройствами. Коммутационные устройства состоят предпочтительно из вакуумных контакторов, однако могут быть предусмотрены также другие коммутационные устройства. Кроме того, может быть также предусмотрено одновременное выполнение показанных на фиг.3 стадий способа, например, стадий способа согласно фиг.3d-3f. Однако при этом, например, выполнение стадии способа, согласно фиг.3е, служит для надежного замыкания коммутационного устройства 16.3 перед размыканием коммутационного устройства 16.2 и 41.2, для того чтобы предотвратить непреднамеренное прерывание тока. Соответствующие аспекты могут возникать для других стадий способа. В частности, уже должна быть подключена третья секция 3.4 обмотки на фиг.3, прежде чем будет шунтировано питание первой секции 3.2 обмотки (фиг.3е), так как в противном случае при определенных обстоятельствах в секции 3.3 обмотки кратковременно может возникнуть слишком большой ток. Предусмотрено, что интервал времени, в течение которого остается представленный запоминающим устройством 42 стабилизатор напряжения, должен быть как можно короче, так как обычно в этом случае перед и после коммутационного стыка ожидаются по существу одинаковые номинальные скорости, и поэтому необходимы по существу одинаковые значения тока. Целесообразным является то, что отдельные признаки изобретения можно использовать в других комбинациях, помимо указанных и описанных выше.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЭКСПЛУАТАЦИИ МАГНИТНОГО ПОЕЗДА | 2003 |
|
RU2336186C2 |
| МОНОРЕЛЬСОВАЯ ТРАНСПОРТНАЯ СИСТЕМА С ВАГОНАМИ НА ВОЗДУШНОЙ ПОДУШКЕ | 2011 |
|
RU2488500C2 |
| Устройство для дистанционного управления передвижным объектом | 1989 |
|
SU1576340A1 |
| Система автоматического секционного орошения для струговой установки | 1985 |
|
SU1278467A1 |
| Устройство для определения места обрыва цепи дистанционного питания | 1990 |
|
SU1802415A1 |
| Устройство для автоматического переключения однофазных сетей | 1985 |
|
SU1377960A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГРУЗОНОСИТЕЛЕМ | 1991 |
|
RU2006435C1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ СИЛЫ ТЯГИ МАНЕВРОВОГО ТЕПЛОВОЗА С ТЯГОВЫМ ГЕНЕРАТОРОМ ПОСТОЯННОГО ТОКА И ДВУМЯ ПАРАЛЛЕЛЬНЫМИ ЦЕПЯМИ ТЯГОВЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ ПОСЛЕДОВАТЕЛЬНОГО ВОЗБУЖДЕНИЯ | 1992 |
|
RU2031012C1 |
| Система для распределения грузов по местам назначения | 1982 |
|
SU1131791A1 |
| СИСТЕМА ПОЛУЧЕНИЯ НА ЛОКОМОТИВЕ ИНФОРМАЦИИ ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЯ ПОДВИЖНОГО СОСТАВА НА СТАНЦИИ | 2005 |
|
RU2295469C1 |





Группа изобретений относится к транспортным системам с электротягой, создаваемой линейными двигателями. Предложены способ и устройство для эксплуатации подвижного состава на магнитной подвеске с синхронным линейным двигателем, который имеет множество расположенных друг за другом в направлении движения секций статорной обмотки, последовательно подключаемых к секционному кабелю. Во время проезда коммутационного стыка по меньшей мере обе примыкающие к коммутационному стыку секции обмотки электрически соединяют последовательно. Таким образом, в зоне коммутационного стыка активным всегда остается весь транспортный двигатель и уменьшения силы тяги не наблюдается. Это положительно сказывается на эффективности эксплуатации подвижного состава. 2 с. и 10 з.п. ф-лы, 8 ил.

 ) движения секцию (например, 3.4) обмотки.
) движения секцию (например, 3.4) обмотки.
| DE 3917058 C1, 08.11.1990 | |||
| DE 2932764 A1, 26.03.1981 | |||
| DE 3303961 A1, 18.08.1983 | |||
| УНИПОЛЯРНЫЙ ЛИНЕЙНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1992 |
|
RU2076440C1 |

