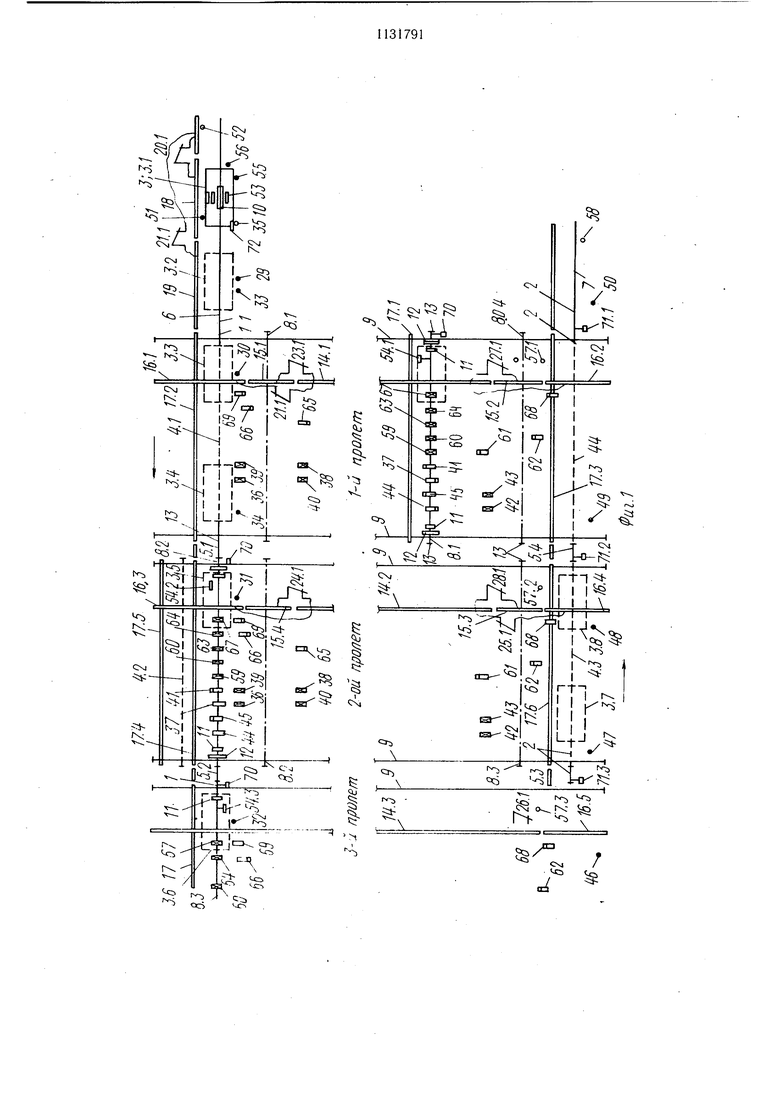
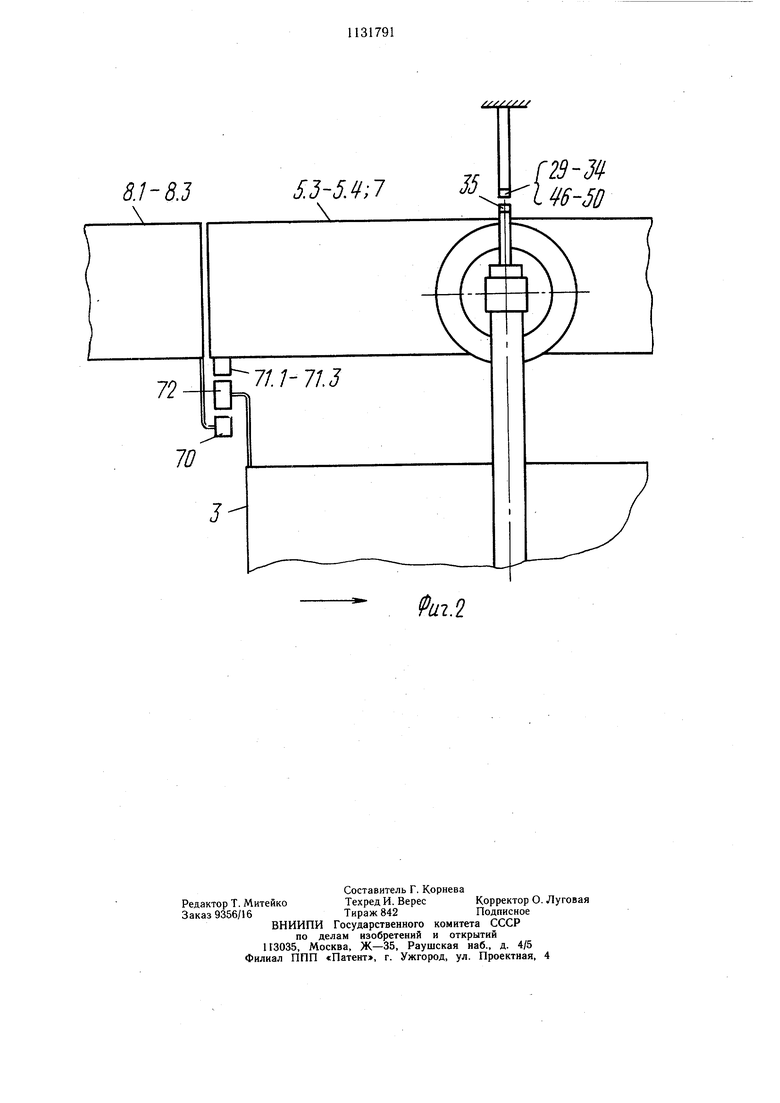
;о Изобретение относится к внутрифабричному транспортированию с автоматическим управлением транспортных средств и может быть использовано в текстильной промышленности для повышения производительности подвесного транспорта в современном многопролетном цехе. Известна система для распределения грузов по местам назначения, содержащая подвижные кран-балки и монорельс, связанные межпролетными мостиками, грузоноситель, установленный с возможностью перемещения от привода вдоль упомянутых кранбалок и монорельса, и устройство управления приводами грузоносителя и кран-балок, включающее в себя троллеи, датчики положения грузоносителя и кран-балок, адресователи и считыватели грузоносителя и кран-балок и включенные в цепи приводов последних выключатели обратного хода 1. Недостатком известного устройства является то, что грузоноситель направляют в назначенный пролет цеха, а после рас, пределения груза к станкам возвращают из пролета цеха по одному и тому же пути, образованному из стыкованных кран-балок, межпролетных мостиков и монорельса. Поэтому до возвращения ранее направленного грузоносителя из любого пролета последующий грузоноситель не может быть направлен в другой пролет цеха. Вследствие этого резко снижается пропускная способность грузоносителей транспортного устроиства, производительность и оперативность доставки груза. Цель изобретения - повышение пропускной способности транспортной системы. Цель достигается те.м, что система для распределения грузов по местам назначения, содержащая подвижные кран-балки, и монорельс, связанные межпролетными мостиками, грузоноситель, установленный с возможностью перемещения от привода вдоль упомянутых кран-балок и монорельса, и устройство управления приводами грузоносителя и кран-балок, включающее в себя троллей, датчики положения грузоносителя и кран-балок, адресователи и считыватели грузоно сителя и кран-балок и включенные в цепи приводов последних выключатели обратного хода, снабжена дополнительными монорельсом и кран-балками, установленными параллельно основным, при этом троллеи устройства управления приводами грузоносителя и кран-балок выполнены секционными, и оно снабжено блоками коммутации питания троллейный секций, выполненными на рале с самоблокировкой, в цепи питания которых включены контакты датчиков поло жения грузоносителя и кран-блок, причем в цепи питания реле блоков коммутации питания троллейных секций грузоносителя и кран-балок включены контакты реле блоков коммутации питания троллейных секций кран-балок и грузоносителя соответственно, и установленными в начале и конце пути движения грузоносителя и в местах перехода грузоносителя с монорельса на кранбалку и с кран-балки на монорельс датчики изменения режимов движения, контакты которых включены в цепи приводов грузоносителя и кран-балки соответственно. На фиг. 1 представлена блочно-технологическая схема системы; на фиг. 2 - конструкция выключателя обратного хода. Система содержит (фиг. 1) путь 1 и путь 2, расположенный параллельно пути 1, вдоль которых имеет возможность двигаться грузоноситель 3 вдоль остановок 3.1-3.8 влево и вправо соответственно. В состав пути 1 входят дополнительные кран-балки 4.1 - 4.2, межпролетные мостики 5.1 и 5.2 и монорельс 6. В состав пути 2 входят кран-балки 4.3 и 4.4, мостики 5.3 и 5-А и монорельс 7. Основные кран-балки 8.1 и 8.3 имеют возможность реверсивно двигаться по мостовым путям 9 и переносить грузоноситель 3, на котором установлен датчик 10 положения грузоносителя. На обоих концах основной кран-балки установлены датчики 11 положения кран-балки, конструкция которых аналогична конструкции датчиков 10, а также устройство 12 автоматической замены местом соответствующей дополнительной кран-балки и основной. Для закрывания и открывания стыков основной кран-балки 8.1-8.3, дополнительной кран-балки 4.1-4.4, мостиков 5.1-5.4 и монорельсов 6 и 7 установлено устройство 13 открывания стыков, представляющее собой предохранительные щеки, связанные с подпружиненными стержнями, на одном из которых закреплен ролик, а на другом - копир, которые взаимодействуют между собой при открывании стыка. Закрывают стыки под действием силы сжатой пружины, с помощью которой подпружинены стержни. Датчики 10 и 11 конструктивно представляют собой ролик, стационарно установленный у места остановки грузоносителя и кран-балки соответственно и взаимодействующий с подпружиненно опускаемыми упорами, связанными с толкателем. Упоры смонтированы на раме, связанной с пружинным амортизатором. Рама в среднем положении фиксируется. Устройство 12 .автоматической замены представляет собой штырь, жестко установленный на балке и снабженный подпружиненным упором и поворачиваемым крючком с роликом, взаимодействующим с копиром, прикрепленным с помощью кронщтейна к элементам здания цеха в месте, предназначенном для замены кран-балок. В состав устройства управления приводами грузоносителя и кран-балок входят троллеи 14.1 - 14.3 с секциями 15.1 - 15.4 и 16.1-16.5. „, , , оо Троллеи 14.1-14.3 устройства управления приводами основной кран-балки 8.18.3, а также передающие ток управления приводам грузоносителя расположены соответственно в первом и третьем пролетах перпендикулярно путям 1 и 2. Тролле управления приводом грузоносителя 3 на пути 1 и 2 и троллеи управления приводом основной кран-балки 8.1-8.3 перед путями 1 и 2 выполнены секционированными. Троллея 14.1 составлена из секций 15.1, 15.2, 16.1 и 16.2, троллея 14.2 - из секций 15.3, 15.4, 16.3 и 16.4, а троллея 14.3 из секции 16.5. В первом пролете троллеи управления 17.1, 17.2 и 17.3 приводом грузоносителя установлены соответственно на основной 8.1 и дополнительной 4.1 кран-балках пути кран-Оалках пути 1 и дополнительной кран-балке 4.4 пути 2. Троллея 17.1 при наличии стыкованной кранбалки 8.1 в пути 1 или пути 2 при помощи скользящего токоприемника (показано) подключена к троллейной секции 16.1 и 16.2 соответственно, а при распределении груза по станкам в первом пролете троллея 17.1 подключена к троллею 14.1. Троллеи 17.2 и 17.3 при помощи скользящего токоприемника подключены к троллейным секциям 16.1 и 16.2. Аналогично во втором пролете троллеи управления 17.4, 17.5 и 17.6 приводом грузоносителя установлены на основной 8.2 и дополнительной 4.2 кранбалках пути 1 и дополнительной кран-балке 4.3 пути 2 соответственно. При наличии стыкованной основной кран-балки 8.2 в пути 1 или пути 2 троллея 17.4 при помощи скользящего токоприемника подключена к троллейной секции 16.3 и 16.4 соответственно, а при распределении груза по станкам во втором пролете троллея 17.4 подключена к троллее 14.2. Троллеи 17.5 и 17.6 при помощи скользящего токоприемника подключены к,троллейным секциям 16.2 и 16.4. В крайнем третьем пролете троллея управления 17.3 приводом грузоносителя установлена на основной кран-балке 8.3. При наличии кран-балки 8.3, стыкованной в пути 2, троллея 17.3 при помощи скользящего токоприемника подключена к троллейной секции 16.5, а во всех остальных положениях кран-балка 8.3 троллеи 17.3 подключена к троллее 14.3. Троллейные секции 18 и 19 предназначены для управления-блокирования привода грузоносителя на монорельс 6. По необходимости троллейных секций 18 может быть установлено несколько. Троллейные секции 15.1, 15.2, 15.3 и 15.4 предназначены для блокирования основной кран-балки 8.1 и 8.2, приближающейся к пути 1 и пути 2 соответственно. Троллейная секция 16.1 и взаимосвязанная с ней троллея 17.1 либо 17.2 предназначены для блокирования грузоносителя в первом пролете пути 1. Троллейная секция 16.4 и взаимосвязанная с ней троллея 17.4 либо 17.6, .кже троллейная секция 16.3 и взаимосвязанная с ней троллея 17.3 предназначе блокирования грузоносителя 3 во третьем пролетах пути 2 соответ„ „;.„„„ ственно. Блокирование основной кран-балки 8.1 и 8.2 выполнено с помощью грузоносителя 3, подходящего по пути 1 справа, а по пути 2 слева к пролету соответствующей блокируемой кран-балки 8.1-8.2. Блокирование грузоносителя 3 на путях 1 и 2 выполнено с помощью впереди грузоносителя (по направлению движения грузоносителя) стыкующейся кран-балки 8.1 и 8.2. Таким „ 1 и 2 по направлению дви грузоносителя блокируемая кранбалка 8.1 и 8.2 расположена впереди блокирующего грузоносителя а блокируемый грузоноситель - сзади блокирующей кранбалки 8.1 и 8.2. При увеличении числа пролетов в цехе свыще трех троллейные секции в стыках добавочных промежуточных пролетов устанавливают так, как установлены упомянутые троллейные секции у стыка первого и второго пролетов. При переходе грузоносителя по пути 1 стыка первого и второго пролетов грузоносителем 3 и кран-балкой 8.2 управляют троллейные секции 16.1 и 15.3 соответственно, а при переходе грузоносителя по пути 2 стыка второго и первого пролетов грузоносителем и кран-балкой 8.1 управляют троллейные секции 16.4 и 15.2 соответственно. В путях 1 и 2 в крайнем третьем пролете нет проездных грузоносителей 3, поэтому в третьем пролете отсутствуют дополнительные кран-балки и троллейные секции для блокирования основной кран-балки 8.3. При направлении грузоносителя 3 по пути 1 в любой данный пролет кран-балка 8.1-8.3 данного пролета должна быть стыкована в пути 1, о чем в пульте управления (не показано), предназначенном для задания адреса грузоносителю 3, извещает сигнальная лампочка. При направлении грузоносителя в третий пролет во втором и третьем пролетах пути 1 нет необходимости для блокирования грузоносителя 3, направленного в третий пролет, ибо кран-балка 8.3 при этом
является стыкованной в пути 1. Вследствие этого троллейная секция 16.3 пути 1 постоянно подключена к току управления, а троллея 14.3 в зоне пути 1 не секционированна.
В пути 2 вправо за третьим пролетом нет стыкующейся кран-балки, которая блокировала бы по пути 1 первого пролета вправо двигающийся грузоноситель. Поэтому в первом пролете пути 2 секция 16.2 подключена к источнику постоянно.
Устройство содержит также троллеи 18 и 19 монорельса 6, подключенные к источнику питания через контакты 20.1 и 21.1 реле самоблокировки (не показано). Секции 16.1, 15.1 и 15.4 подключены к источнику с помощью контактов 22.1 и 23.1 и 24.1 реле, а секции 16.4, 16.3, 15.2 и 15.3 - с помощью контактов 25.1, 26.1, 27.1 и 28.1 соответственно.
На пути 1 у каждой троллейной секции, начиная от второй до предпоследней, расположены датчики 29-32 положения грузоносителя с контактами, включенными в блоки коммутации питания троллейных секций грузоносителя.
Перед первым и вторым пролетами на пути 1 расположены датчики 33 и 34 положения основной кран-балки. ДатчиКи 29- 34 выполнены в виде герконов, взаимодействующих с постоянным магнитом 35, установленным на грузоносителе 3. На пути движения кран-балки расположен конечный выключатель 36, выполняющий роль считывателя и взаимодействующий с адресователем 37. Устройство содержит также датчики«-38 и 39 положения грузоносителя 3 на пути движения кран-балки и датчик 40 положения грузоносителя на пути дви. жения кран-балки, расстыкованной с путем 1. Датчики 38 и 39 представляют собой конечные выключатели и взаимодействуют с адресователем 41. Датчики 42 положения грузоносителя на пути движения кран-балки, стыкующейся с путем 2, и датчики 43 положения на пути расстыкованной кранбалки взаимодействуют с адресователями 44 и 45 соответственно. Датчики 46, 47 и 48 положения кран-балки расположены на пути 2 перед первым и вторым пролетами, а за вторым и первым пролетами расположены датчики 49 и 50 положения кран-балки.
В устройство входят также датчики 51 изменения режима движения грузоносителя, взаимодействующий с постоянным магнитом 52, датчик 53 изменения режима движения грузоносителя, взаимодействующий с адресователями 54.1-54.3, и датчики 55 и 56 изменения режима движения грузоносителя при движении вправо, взаимодействующие с магнитами 57.1-57.3, 58, установленными по пути 2 на элементах здания. Для переключения привода на автоматическое самоуправление с приближением кран-балки к остановке и обратно на прежний режим служат датчики 59 и 60, взаимодействующие с адресователями 61 и 62, и датчики изменения режима 63 и 64, взаимодействующие с адресователями 65, 66.
Для выключения привода кран-балки, стыкующейся в путях 1 и 2 соответственно, служат конечные выключатели 68 и 69.
Для включения кран-балки служит выключатель обратного хода, конструктивно выполненный на герконе 70 (фиг. 2) постоянных магнитов 71.1-71.3 и магнитопровода 72.
Система работает следующим образом.
При подходе грузоносителя 3 к пункту задания адреса грузоносителю наносится необходимый координатный адрес из дистанционного пульта адресования. Например, необходимо направить грузоноситель на основную кран-балку 8.3 третьего пролета. При наличии сигнала, указывающего на то, что кран-балка уже стыкована в пути 1, переставляют датчик 53 на кран-балке 8.3. При движении грузоносителя датчик 51 (геркон) взаимодействует с магнитом 52 и своим контактом переключает привод грузоносителя на автоматическое самоуправление. При дальнейщем движении грузоносителя 3 по монорельсу 6 датчик 29 (тоже геркон) взаимодействует с магнитом 35 и разрывает своим контактом цепь реле самоблокировки, обесточивая троллеи 18, затем магнит 35 взаимодействует с датчиком 33. При этом у стыка монорельса 6 и первого пролета возможны две ситуации: когда кран-балка 8.1 находится в стадии стыкования в пути 1 и вне стадии стыкования.
По первой ситуации кран-балка 8.1 в стадию стыкования в пути 1 перешла раньще (процесс стыкования не заверщен) и взаимодействием адресователя 41 с датчиком 38 обеспечилось прохождение грузоносителя 3 к остановке 3.2, и за счет взаимодействия магнита 35 с датчиком 33 кран-балка продолжает стыковаться, а грузоноситель 3 в остановке 3.2 выжидает конца стыковки, а затем автоматически включается влево для перехода на кран-балку 8.1, затем обесточивает троллеи 19, поэтому грузоноситель остается в остановке 3.2.
После обесточивая троллеи 18 грузоносителем 3 в остановке 3.2 следующий грузоноситель, подходящий по монорельсу 6, выключается при помощи датчика 10.
При переходе кран-балки 8.1 в стадию стыкования в пути 1 датчик 63 взаимодействует с адресователем 65 и переводит привод кран-балки на автоматическое самоуправление при движении ее назад. Непосредственно перед стыкованием датчик 64 взаимодействует с адресователем 66 и переводит кран-балку обратно в прежний режим управления.
В пути 1 стыкуемая кран-балка выключается с помощью взаимодействия конечного выключателя (датчика 67) с адресователем 69, при этом останавливается и фиксируется кран-балка 8.1 с монорельсом 6 и мостиком 5.1. При стыковании кран-балка 8.1 и дополнительная кран-балка 4.1 при помощи устройства 12 меняются местами.
Перед стыкованием кран-балки 8.1 в пути 1 адресователь 41 взаимодействует с датчиком 39 первого пролета, обеспечивая подключение троллея 19 к источнику, обесточивая при этом секцию 15.1 кран-балки 8.1 При подключении троллея 19 к питанию включается с определенной выдержкой времени, необходимой для амортизационного стыкования привод грузоносителя 3 для передвижения его влево.
При второй ситуации грузоноситель подощел к кран-балке раньше, чем балка перещла в стадию стыкования в пути 1. В этом случае грузоноситель продолжает двигаться влево по дополнительной кран-балке 4.1, а балка 8.1 при помощи обесточенной секции 15.1 выключается датчиком 11 и выжидает до схода грузоносителя 3 с дополнительной кран-балки 4.1. Затем кранбалка 8.1 включается и продолжает стыковаться в пути 1. Таким образом, в первой и второй ситуациях при взаимодействии адресователя 41 с конечным выключателемдатчиком 38 и при взаимодействии постоянного магнита с датчиком 33 решается первенство движения кран-балки 8.1 и грузоносителя 3 у стыка монорельса 6 и первого пролета. Следовательно, взаимное блокирование троллейных секций 15.1 и 19 выполняется перпендикулярно двигающимся объектом, т. е. кран-балкой и грузоносителем 3.
Во время движения грузоносителя 3 по пути 1 в первом пролете секция 15.1 и троллей 19 обесточены, поэтому во время движения грузоносителя по дополнительной кран-балке 4.1 к пути Г подходящая кранбалка 8.1 выключается обесточенной секцией 15.1, останав;швается и фиксируется в остановке, а по монорельсу 6 к правому стыку первого пролета подходящий грузоноситель 3 выкдючается обесточенным троллеем 19. Первенство подхода подвижных объектов в указанных остановках во время движения грузоносителя 3 по дополнительной кран-балке 4.1 значения не имеет.
При подходе грузоносителя к стыку первого и второго пролетов по пути 1 постоянный магнит 35 грузоносителя 3 взаимодействует с датчиком 34 (герконом), который своими контактами включен в цепь реле блокировки.
При подходе кран-балки 8.2 к пути 1 адресователь 41, установленный на кранбалке 8.2, взаимодействует с датчиком 38 (конечным выключателем) второго пролета и контакты указанного датчика замыкаются в цепях реле блокировки блока управления приводами грузоносителя и кран-балки.
По первенству замыкания его контактов у стыка первого и второго пролетов определяется первенство движения грузоноси теля 3, подходящего по пути 1 к стыку первого и второго пролетов и кран-балки 8.2, подходящей к пути 1, подобно как определяется первенство движения подвижных объектов у стыка монорельса 6 и первого
5 пролета. При этом либо первым двигается грузоноситель 3, а последующим - кранбалка 8.2, либо первым двигается кранбалка 8.2, а последующим - грузоноситель 3.
При первенстве грузоносителя 3 кран0 балка 8.2, подходящая к пути 1 позже, выключается обесточенной троллейной секцией 15.2, останавливается и фиксируется в остановке. При первенстве кран-балки 8.2 грузоноситель 3, двигающийся по кран-балке
5 8.1, выключается обесточенной троллейной секцией 16.1 -17.1, а двигающийся по дополнительной кран-балке 4.1 грузоноситель 3 выключается обесточенной троллейной секцией 16.1 -17.4, останавливается и фиксируется в остановке 3.4. Однако грузоно0 ситель в первом пролете при помощи троллейных секций 16.1 -17.1 или 16.1 -17.4 может выключаться раньще, чем он подошел бы в остановку 3.4. При этом грузоноситель останавливается на кран-балке 8.1 в любой остановке, оборудованной для
распределения груза к станкам, либо в любой, соответственно, оборудованной остановке на дополнительной кран-балке 4.1 и ввиду случайности выключения даже между этими остановками. В остановке 3.4 на кран0 балке 8.1 либо на дополнительной кранбалке 4.1 грузоноситель 3 останавливается, выключенный в крайне последний момент перед замыканием контакта при взаимодействии датчика 34 с постоянным магнитом 35, установленным на грузоносителе 3. Если грузоноситель 3 непосредствнно перед остановкой 3.4 не выключается обесточенной секцией 16.1 -17.1 или 16.1 -17.4, то грузоносителем обесточивается троллейная секция 15.2 кран-балки 8.2 и блокируется
0 обесточивание секции 16.1. При этом грузоноситель 3 переходит в третий пролет, не останавливаясь в остановке 3.4. Кранбалка 8.2, подходящая к пути 1, выключается обесточенной троллейной секцией 15.2, останавливается и фиксируется в своей ос5 тановке.
За стыком первого и второго пролетов датчик 31 взаимодействует с постоянным
магнитом 35, обестачивая секции 16.1 - 17.4, а при наличии стыкованной балки 8.1 в пути 1 также и секции 16.1 -17.1.
После распределения груза к станкам третьего пролета кран-балка 8.3 выключается вперед при помощи адресователя (без позиции), установленного на цепи распределительного конвейера грузоносителя, при этом грузоноситель находится в фиксированном положении на правом конце кранбалки 8.3.
Перед стыкованием в пути 2 адресователь 62 взаимодействует с датчиком 60, который своими контактами переводит привод кран-балки 8.3 на самостоятельное управление без помощи грузоносителя. В пути 2 стыкуемая кран-балка 8.3 выключается при взаимодействии адресователя 68 третьего пролета с датчиком 67, установленным на кран-балке 8.3, останавливая и точно фиксируя кран-балку 8.3 в пути 2. Перед стыкованием герконовый датчик 55 взаимодействует с магнитом 57.3 и своими контактами переводит привод грузоносителя 3 при движении вправо на автоматическое самоуправление.
При возвращении кран-балка 8.2 и дополнительная кран-балка 4.3 меняются местами s пути 2. Адресователь 45 возвращающейся кран-балки 8.2 взаимодействует с датчиком 43, который своими контактами подключает соответствующие троллейные секции и замыкает реле времени в цепи привода грузоносителя. При сходе грузоносителя с кран-балки 8.3 магнитопровод 72 (фиг. 2) перемещается между постоянным магнитом 71.3 и герконом 70, вследствие чего замыкается контакт геркона и включает кран-балку на движение назад.
После схода грузоносителя с дополнительной кран-балки 8.3 и 4.3 постоянный магнит 35 взаимодействует с датчиком 49,
с помощью контактов которого происходит подключение секции 15.3 к источнику. После схода грузоносителя с дополнительной кран-балки 4.4 при взаимодействии магнита 35 с датчиком-герконом 50 обесточиваются секции 16.4-17.6. С подключением секции 15.4 к источнику кран-балка начинает двигаться и продолжает стыковаться в пути 2. Непосредственно перед стыкованием кран-балки 8.1 адресователь 62 взаимодействует с датчиком 60, переводя привод кран-балки 8.1 обратно на прежнее управление и переводит привод кран-балки 8.1 на самостоятельное управление без помощи грузоносителя.
Далее движение происходит аналогично описанному.
При сходе грузоносителя 3 с кран-балки
8.1с помощью магнитопровода 72, постоянного магнита 71.1 и геркона 70 включается кран-балка 8.1 в движение назад. Адресователь 45 возвращающейся кран-балки взаимодействует с датчиком 43, обеспечивая подключение троллейных секций к источнику и включение реле времени, через которое грузоноситель включается на движение вправо.
При сходе грузоносителя с кран-балки
8.2кран-балка включается на движение обратно с помощью выключателя обратного хода балки.
Применение системы позволяет увеличить пропускную способность грузоносителей межпролетного црха, увеличить гибкость, оперативность доставки груза к местам назначения, расширить функциональные возможности и производительность транспортирования, являясь при этом не сложной по конструкции, а потому может найти щирокое применение в промышленных предприятиях.
/ХХ//ХХХ
СИСТЕМА ДЛЯ РАСПРЕДЕЛЕНИЯ ГРУЗОВ ПО МЕСТАМ НАЗНАЧЕНИЯ, содержащая подвижные кран-балки и монорельс, связанные межпролетными мостиками, грузоноситель, установленный с возможностью перемещения от привода вдоль упомянутых кран-балок и монорельса, и устройство управления приводами грузоносителя и кран-балок, включающее в себя троллеи, датчики положения грузоносителя и кран-балок, адресователи и считыватели грузоносителя и кран-балок и включенные в цепи приводов последних выключатели обратного хода, отличающаяся тем, что, с целью повышения пропускной способности, она снабжена дополнительными монорельсом и кран-балками, установленными параллельно основным, при этом троллеи устройства управления приводами грузоносителя и кран-балок выполнены секционными, и оно снабжено блоками коммутации питания троллейных секций, выполненными на реле с самоблокировкой, в цепи питания которых включены контакты датчиков положения грузоносителя и кран-балок, причем в цепи питания реле блоков коммутации питания троллейных секций грузоносителя и кран-балок включены контакты реле блоков коммутации питания троллейных секций кран-балок и грузоносителя соответственно, и установленными в начале и конце пути (Л движения грузоносителя и в местах перехода грузоносителя с монорельса на кранбалку и с кран-балки на монорельс датчиками изменения режима движения, контакты которых включены в цепи приводов грузоносителя и кран-балок соответственно.
и
F1
10
29-т
55 6-50
.1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для распределения грузов по местам назначения | 1978 |
|
SU753737A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
