Изобретение относится к промышленному транспорту и может быть использовано в текстильной и других отраслях промышленности для бесперегрузочного складирования продуктов производства.
Известно устройство для управления грузоносителем, содержащее секционированные троллеи, расположенные в местах остановки грузоносителя и подключенные к питанию через контакты реле и конечного выключателя [1] .
Недостатком известного устройства является то, что оно предназначено для управления грузоносителем, перемещающимся только вдоль непрерывного пути, и не может быть применено для управления грузоносителем, передаваемым с помощью подвижного мостика перпендикулярно с параллельных путей подвесного склада на монорельсовый путь.
Известно устройство для управления грузоносителем, содержащее путевые выключатели, расположенные в каждом месте остановки грузоносителя, секционированный в местах остановки перед подвижным мостиком троллей, каждая секция которого подключена к шине питания через размыкающий контакт путевого выключателя, элементы фиксирования грузоносителя, переключатель режима движения, расположенный в зоне действия подвижного мостика, и постоянные магниты, размещенные в начале и конце участка с секционированным троллеем и взаимодействующие с герконами, установленными на грузоносителе, и элемент переключения питания [2] .
Недостатком известного устройства является то, что оно предназначено для управления грузоносителем, автоматически передаваемым при помощи подвижного мостика перпендикулярно с монорельсового пути на параллельные пути подвесного склада, и непригодно для управления грузоносителем при автоматическом его возвращении обратно при помощи подвижного мостика с параллельных путей подвесного склада на монорельсовый путь.
Известно устройство для управления грузоносителем, содержащее путевые выключатели, расположенные на пути подвесного склада в каждом месте остановки грузоносителя, секционированный в местах остановки троллей, каждая секция которого подключена к шине питания через размыкающий контакт путевого выключателя, элемент фиксирования грузоносителя, переключатель режима движения и копирные адресователи одностороннего действия, установленные с возможностью взаимодействия со считывателем, установленным на мостике и выполненным в виде конечного выключателя, кинематически связанного с подпружиненным рычагом, имеющим на свободном конце каток, причем контакты конечного выключателя считывателя включены в электрические цепи управления грузоносителем и мостиком, механизм взаимопереключения которых содержит конечные выключатели, установленные на грузоносителе и мостике, кинематически связанные с подпружиненными стержнями, на конце которых установлены копир и каток с возможностью взаимодействия друг с другом, а механизм отключения исполнительного органа содержит конечный выключатель, кинематически связанный с адресователем, который установлен с возможностью взаимодействия с катком считывателя при движении мостика назад [3] .
Недостатком известного устройства является то, что грузоносители, автоматически возвращаемые при помощи подвижного мостика с параллельных путей подвесного склада на монорельсовый путь, отправляются только вправо и непригодно для автоматического отправления возвращаемых грузоносителей с подвижного мостика на монорельсовый путь вправо или влево в зависимости от пути склада их поступления, т. е. грузоносители, возвращаемые с одних путей подвесного склада, автоматически отправляются на монорельсовый путь вправо, а возвращаемые с других путей подвесного склада - на монорельсовый путь влево.
Цель изобретения - обеспечение автоматического отправления грузоносителей с мостика на монорельсовый путь вправо или влево в зависимости от пути склада их поступления.
Цель достигается тем, что в устройстве для управления грузоносителем, содержащем путевые выключатели, расположенные на пути подвесного склада в каждом месте остановки грузоносителя, секционированный в местах остановки троллей, каждая секция которого подключена к шине питания через размыкающий контакт путевого выключателя, элемент фиксирования грузоносителя, переключатель режима движения и копирные адресователи одностороннего действия, установленные с возможностью взаимодействия со считывателем, установленным на мостике и выполненным в виде конечного выключателя, кинематически связанного с подпружиненным рычагом, имеющим на свободном конце каток, причем контакты конечного выключателя считывателя включены в электрические цепи управления грузоносителем и мостиком, механизм взаимопереключения которых содержит конечные выключатели, установленные на грузоносителе и мостике, кинематически связанные с подпружиненными стержнями, на концах которых установлены копир и каток с возможностью взаимодействия друг с другом, а механизм отключения исполнительного органа содержит конечный выключатель, кинематически связанный с адресователем, который установлен с возможностью взаимодействия с катком считывателя при движении мостика назад, устройство дополнительно снабжено двумя реле с включающими-отключающими обмотками, включенными в электрическую цепь управления грузоносителем через герконы, которые установлены на грузоносителе с возможностью взаимодействия с постоянными магнитами, расположенными на стыках путей подвесного склада и монорельсового пути, которые установлены с возможностью взаимодействия с мостиком, причем контакт каждого реле с включающими-отключающими обмотками включен в цепь соответствующего реле времени отправления грузоносителя вправо и влево.
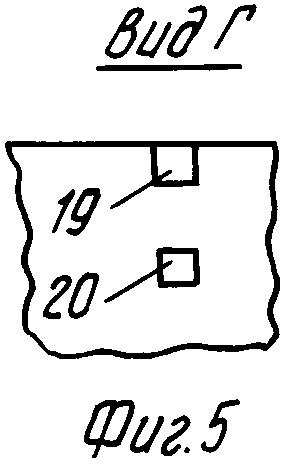
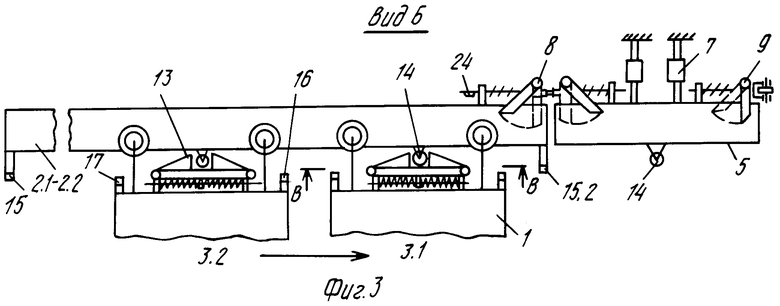
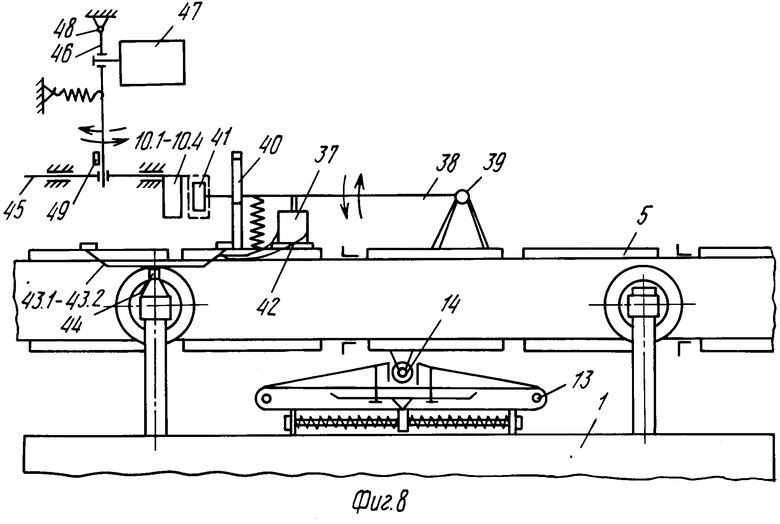
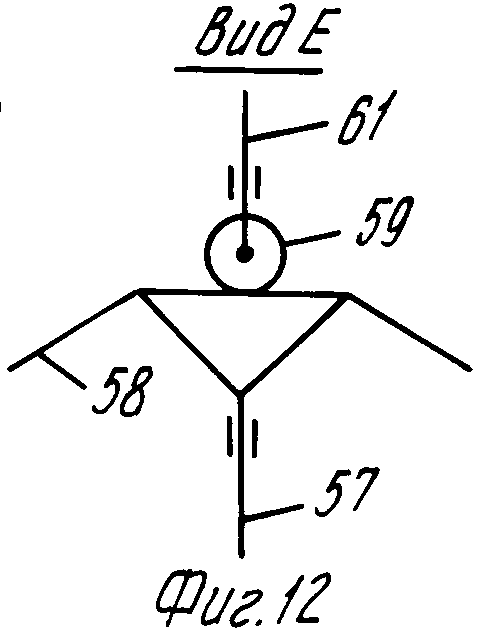
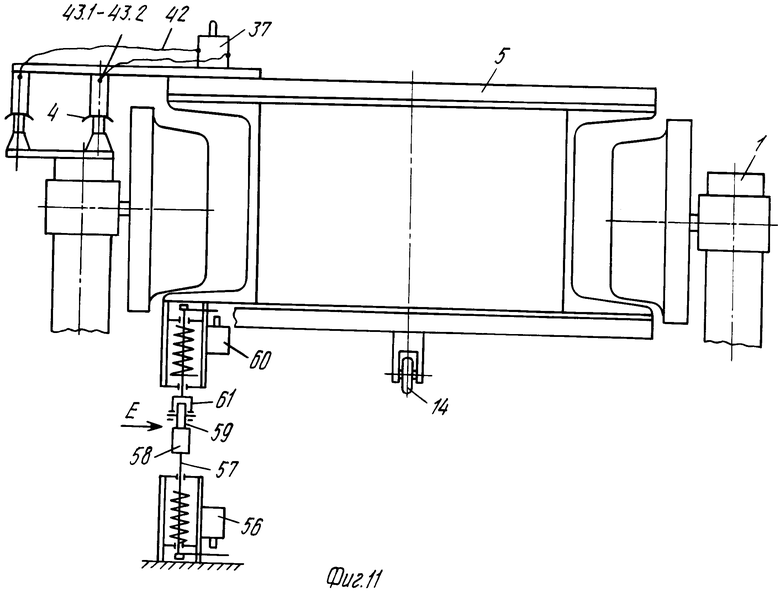
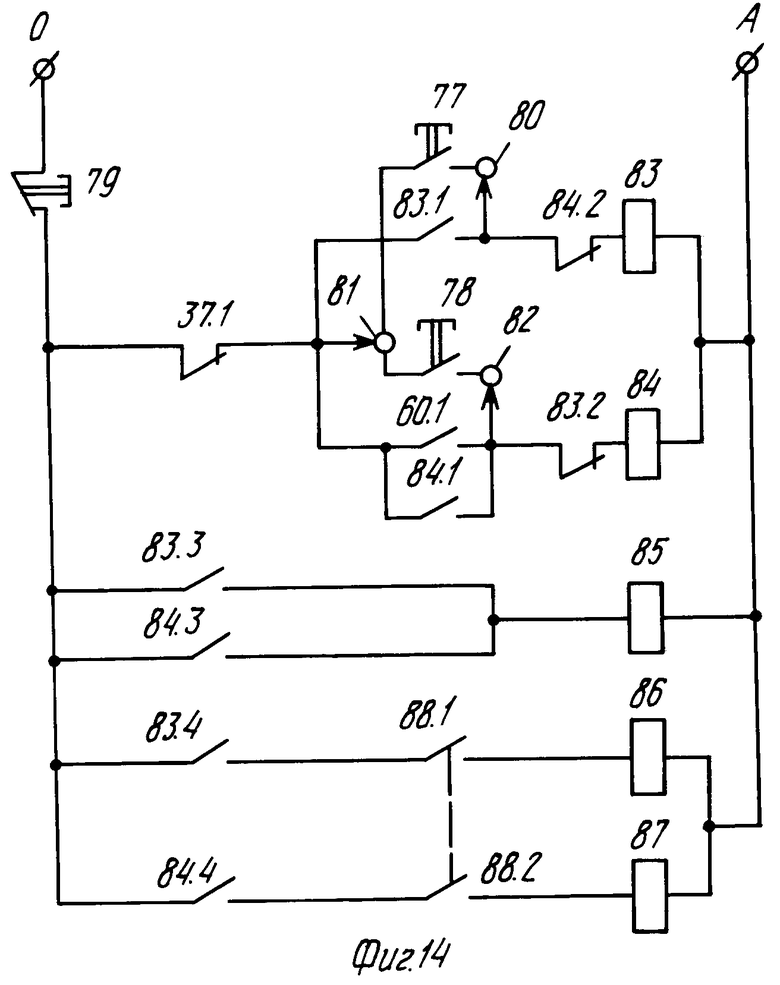
На фиг. 1 изображена схема взаимного расположения элементов устройства; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вид Б на фиг. 1; на фиг. 4 - сечение В-В на фиг. 3; на фиг. 5 - вид Г на фиг. 4; на фиг. 6 - вид Д на фиг. 4; на фиг. 7 - схема расположения средств взаимоуправления грузоносителями на пути подвесного склада; на фиг. 8 - считыватель мостика и механизм переставления адресователя; на фиг. 9 - электрическая схема управления адресователем; на фиг. 10 - механизм отключения исполнительного органа при сбрасывании адреса; на фиг. 11 - механизм взаимопереключения грузоносителя и мостика; на фиг. 12 - вид Е на фиг. 11; на фиг. 13 - электрическая схема управления грузоносителем; на фиг. 14 - электрическая схема управления мостиком.
Грузоносители 1 (фиг. 1), поступающие слева на пути 2.1-2.2 подвесного склада, имеют возможность двигаться по этим путям слева направо и, начиная от правого конца пути, автоматически расстанавливаться один за другим в местах остановки 3.1-3.4. Число путей 2.1-2.2 подвесного склада, а также число мест остановки 3.1-3.4 на этих путях может быть любое.
С путей 2.1-2.2 подвесного склада на монорельсовый путь 4 грузоноситель автоматически передают при помощи подвижного мостика 5, перемещающегося по подкрановым путям 6. Мостик 5 при помощи элемента 7 стыкования имеет возможность автоматически стыковаться с путями 2.1-2.2 подвесного склада и с монорельсовым путем 4. Открывание - закрывание стыка монорельсового пути 4 и стыков путей 2.1-2.2 подвесного склада, взаимодействующих с левым стыком мостика 5, производится управляемым запорным элементом 8, а открывание-закрывание стыка монорельсового пути 4, взаимодействующего с правым стыком мостика - автоматическим запорным элементом 9. Копирные адресователи 10.1-10,4 и 11 одностороннего воздействия (фиг. 1, 2) установлены на конструкциях здания и составлены из шарнирно соединенных горизонтального и наклонного участков. Наклонный участок адресователя направлен навстречу движения выключаемого мостика. Адресователи 10.1-10.4 предназначены для выключения мостика 5 при подходе его к заданному пути 2.1-2.2 подвесного склада, а адресователь 11 предназначен для выключения мостика при возвращении его на монорельсовый путь 4. Адресователи 10.1-10.4 расположены по одной линии вдоль подкрановых путей 6 с возможностью переставления их при задании адреса перпендикулярно подкрановым путям. Адресователь 11 установлен неподвижно и вне линии адресователей 10.1-10.4. Адресователи 10.1-10.4 и 11 взаимодействуют со считывателем 12 мостика 5. На путях 2.1-2.2 подвесного склада, монорельсовом пути 4 и подвижном мостике 5 грузоносители 1 точно фиксируют при помощи элемента 13 фиксирования, установленного на грузоносителе и взаимодействующего с роликом 14 (фиг. 3, 8), закрепленным на пути перемещения грузоносителя в месте его остановки.
Для перевода грузоносителя 1 на автоматический режим управления и обратно на прежний режим управления при движении грузоносителя вправо на пути 2.1-2.2 подвесного склада установлены постоянные магниты 15.1-15.2 (фиг. 3), расположенные, соответственно, в левом и правом концах пути 2.1-2.2, взаимодействующие с герконами 16 и 17 (фиг. 4) с контактами 16.1 и 17.1 (фиг. 13).
Подготовка автоматического отправления грузоносителя 1 вправо с мостика 5 на монорельсовый путь 4 (фиг. 1), возвращаемого при помощи подвижного мостика 5 с путей 2.1 подвесного склада на монорельсовый путь 4, осуществляется с помощью постоянных магнитов 18.1 и 18.2, установленных, соответственно, на путях 2.1 и монорельсовом пути 4, взаимодействующих с герконами 19 и 20 (фиг. 4, 5) с контактами 19.1 и 20.1 (фиг. 13). Аналогично, подготовка автоматического отправления грузоносителя 1 влево с мостика 5 на монорельсовый путь 4, возвращаемого при помощи подвижного мостика 5 с путей 2.2 подвесного склада на монорельсовый путь 4, осуществляется с помощью постоянных магнитов 21.1 и 21.2, установленных, соответственно, на путях 2.2 подвесного склада и монорельсовом пути 4, взаимодействующих с герконами 22 и 23 (фиг. 4, 6) с контактами 22.1 и 23.1 (фиг. 13).
Автоматическое включение грузоносителя, стоящего на месте остановки 3.1 (фиг. 1) пути подвесного склада для перехода его на подвижный мостик 5 при стыковании мостика с заданным путем, выполнено при помощи кулачка 24 (фиг. 7), установленного на стержне 25 управляемого стыкооткрывающего элемента 8 (фиг. 1). Кулачок взаимодействует с переключателем 26 режима движения с размыкающим и замыкающим контактами 26.1, 26.2. Троллейные секции 27.1-27.3 управления грузоносителем подключены к шине 28 питания. Троллейная секция 27.1 подключена к шине питания при помощи замыкающего контакта 26.2 переключателя 26. Троллейная секция 27.2 к шине питания подключена при помощи размыкающего контакта 26.1 переключателя 26 и последовательно включенного размыкающего контакта путевого выключателя 29.1, места остановки 3.1 грузоносителя. Троллейная секция 27.3 к шине 28 питания подключена при помощи размыкающего контакта путевого выключателя 29.2 места остановки 3.2 грузоносителя. Троллейная секция 27.4 (на фиг. 7 не показана) к шине 28 питания подключена при помощи размыкающего контакта путевого выключателя места остановки 3.3 и т. д.
Троллейная секция 30 управления грузоносителем на подвижном мостике 5 (фиг. 2, 3) при точно стыкованном мостике в путях 2.1-2.2 подвесного склада оказывается в одной линии с троллейными секциями 27.1-27.3. Троллейная секция 30 к шине 31 питания, расположенной вдоль пути движения мостика, постоянно подключена при помощи токоснимателя 32.
Конечный выключатель 29.1-29.2 кинематически связан с одноплечим подпружиненным рычагом 33, на свободном конце которого надет каток 34, взаимодействующий с копиром 35, установленным на грузоносителе. На грузоносителе установлен также токосниматель 36, взаимодействующий с секционированными троллеями подвесных путей.
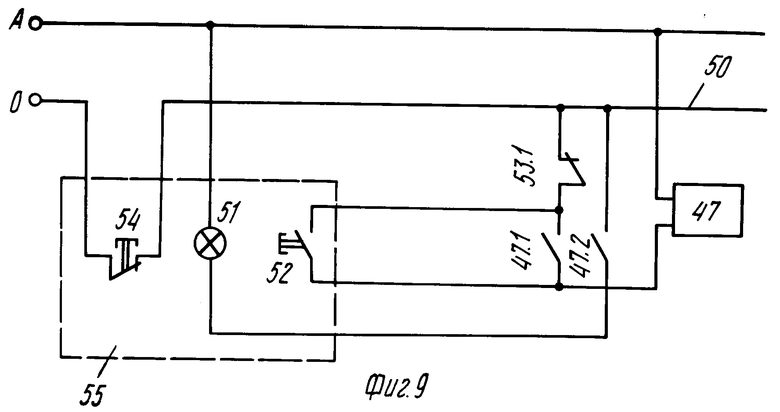
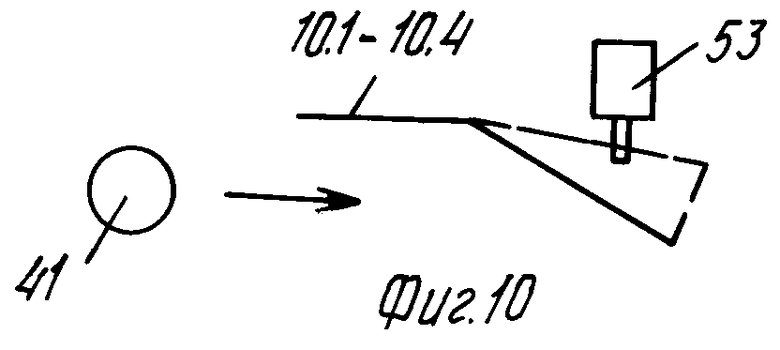
Считыватель 12 (фиг. 1) содержит конечный выключатель 37 (фиг. 8) с контактами 37.1 (фиг. 14) и 37.2 (фиг. 13), который жестко установлен на мостике 5 и кинематически связан с подпружиненным одноплечим рычагом 38, поворачиваемым относительно оси 39, прикрепленной к мостику. Предельные положения рычага определяет обойма 40. На свободном конце рычага установлен каток 41, взаимодействующий с адресователями 10.1-10.4 и 11. Контакт 37.1 (фиг. 14) предназначен для выключения мостика 5 при подходе его к заданному пути 2.1-2.2 (фиг. 1) подвесного склада, а также при возвращении мостика 5 в монорельсовый путь 4. Контакт 37.2 (фиг. 13) предназначен для включения грузоносителя вправо или влево при стыковании мостика в монорельсовом пути. Для передачи тока управления от конечного выключателя 37 к грузоносителю, зафиксированному на мостике, контакт 37.2 при помощи проводов 42 соединен с троллейными секциями 43.1 и 43.2 (фиг. 13), установленными на мостике и взаимодействующими с подпружиненными (пружины не показаны) токоснимателями 44, установленными на грузоносителе. Адресователь 10.1-10.4 скреплен со штоком 45, кулисно соединенным с одноплечим подпружиненным рычагом 46, поворачиваемым при помощи исполнительного органа (электромагнита 47 вокруг оси 48, прикрепленной к элементам здания. Предельные положения рычага 46 ограничиваются упорами 49. Исполнительный орган, имеющий контакты 47.1 и 47.2 (фиг. 2), присоединен к проводам 50 электрического тока управления. Блок-контакт 47.1 предназначен для удержания питания исполнительного органа 47, а контакт 47.2 - для включения сигнальной лампы 51. Включение исполнительного органа 47 осуществляется с помощью кнопки 52 пуска, а его автоматическое выключение - при помощи контакта 53.1 конечного выключателя 53 (фиг. 10), взаимодействующего с наклонным участком адресователя, поднимаемым катком 41 (фиг. 8), возвращаемого мостика. Выключение исполнительного органа осуществляется с помощью кнопки "Стоп" 54. Кнопки 52, 54 и сигнальная лампа 51 установлены на операторском пульте 55 управления.
Для автоматического выключения грузоносителя, поступающего на мостик 5, предназначен выключатель 56 (фиг. 11), установленный на грузоносителе и имеющий контакт 56.1 (фиг. 13). Конечный выключатель 56 кинематически связан с подпружиненным стержнем 57, снабженным копиром 58, взаимодействующим с катком 59. Для автоматического включения мостика назад, стыкованного с любым путем 2.1-2.2 подвесного склада при заходе на него грузоносителя, предназначен конечный выключатель 60, установленный на мостике и имеющий контакт 60.1 (фиг. 14). Конечный выключатель 60 кинематически связан с подпружиненным стержнем 61, снабженным катком 59 (фиг. 12), взаимодействующим с копиром 58.
Включение грузоносителя для движения, соответственно, вправо и влево осуществляется с помощью кнопки 62 и 63 пуска, а его выключение при помощи кнопки "Стоп" 64. Автоматическое выключение грузоносителя при его заходе на мостик осуществляется с помощью контакта 56.1 конечного выключателя 56 (фиг. 11). Промежуточные реле 65 и 66 с контактами 65.1-65.4 и 66.1-66.4 предназначены для включения движения грузоносителя соответственно вправо и влево. Магнитный пускатель 67 с контактом 67.1 предназначен для включения толкателя элемента 13 (фиг. 1) фиксирования грузоносителя и выключения реле 68, 69 и 70 времени с контактами 68.1, 69.1, 69.2, 70.1 и 70.2. Контакты 68.1, 69.2 и 70.2 замыкаются с определенной выдержкой времени, необходимой для амортизационного стыкования мостика. Магнитные пускатели 71 и 72 предназначены для включения электропривода грузоносителя, соответственно, вправо и влево. Предохранительные контакты 73.1, 73.2 элемента 13 фиксирования грузоносителя служат для предотвращения преждевременного включения грузоносителя тогда, когда он не освобожден этим элементом. Реле 74 с контактом 74.1 и включающей - отключающей обмотками 74.2, 74.3 предназначено для переключения электропривода грузоносителя с помощью контакта 16.1 на режим автоматического управления при заходе грузоносителя слева на путь 2.1-2.2 подвесного склада, а также для переключения электропривода грузоносителя с помощью контакта 17.1 на прежний режим управления при уходе грузоносителя с пути 2.1-2.2 на стыкованный с заданным путем мостик 5. Подготовка электропривода грузоносителя для автоматического его отправления вправо с мостика 5, стыкованного в монорельсовом пути 4, а также для восстановления этой подготовки осуществляется при помощи реле 75 с контактом 75.1 и включающей-отключающей обмотками 75.2, 75.3. Включение-выключение реле 75 выполнено с помощью контактов 19.1 и 20.1. Аналогично подготовка электропривода грузоносителя для автоматического его отправления влево с мостика 5, стыкованного в монорельсовом пути 4, а также для восстановления этой подготовки осуществляется при помощи реле 76 с контактом 76.1 и включающей-отключающей обмотками 76.2, 76.3. Включение-выключение реле 76 выполнено с помощью контактов 22.1 и 23.1.
Ручное включение мостика 5 вперед и назад (на фиг. 1 вверх и вниз) выполнено соответственно при помощи кнопок 77 и 78 пуска, а его выключение - при помощи кнопки "Стоп" 79. Кнопки 77, 78 и 79 установлены на операторском пульте 55 управления (фиг. 9). Автоматическое включение мостика 5 назад выполнено с помощью контакта 60.1 конечного выключателя 60 (фиг. 11), а его автоматическое выключение - с помощью контакта 37.1 конечного выключателя 37 (фиг. 8). Для включения мостика вперед предназначены троллеи 80, 81, а для включения назад - троллеи 81, 82. Промежуточные реле 83, 84 с контактами 83.1-83.4 и 84.1-84.4 служат для включения мостика 5 соответственно вперед и назад. Магнитный пускатель 85 предназначен для включения толкателя элемента 7 (фиг. 1) стыкования мостика, а магнитные пускатели 86 и 87 - для включения мостика соответственно вперед и назад. Предохранительные контакты 88.1-88.2 элемента 7 стыкования мостика предохраняют его от преждевременного включения до тех пор, пока он не освобожден этим стыкующим элементом.
Устройство работает следующим образом.
При заходе грузоносителя слева на путь 2.1-2.2 подвесного склада геркон 16 (фиг. 3, 4) взаимодействует с постоянным магнитом 15.1 и замыкает контакт 16.1 (фиг. 13). При этом включается реле 74, которое замыкает контакт 74.1 и переводит электропривод грузоносителя на автоматическое самоуправление.
При отсутствии грузоносителя на заданном пути подвесного склада направленный грузоноситель по нему передвигается вправо до тех пор, пока его токосниматель 36 (фиг. 7) не заходит на обесточенную троллейную секцию 27.1. При этом выключаются фиксирующий элемент 13 (фиг. 3) и электропривод грузоносителя. Вследствие этого упоры фиксирующего элемента поднимаются, останавливают и точно фиксируют грузоноситель в месте остановки 3.1 относительно упорного ролика 14. При этом установленный на грузоносителе копир 35 (фиг. 7) давит на каток 34 и освобождает конечный выключатель 29.1 места остановки 3.1, контакт которого размыкается и отключает троллейную секцию 27.2 от шины 28 питания. Затем на месте остановки 3.2 зафиксированный грузоноситель обесточивает троллейную секцию 27.3 и т. д. Таким образом подъезжающие грузоносители на пути подвесного склада расстанавливаются один за другим.
Для возвращения грузоносителя 1 с заданного пути 2.1-2.2 подвесного склада на монорельсовый путь 4 (фиг. 1) оператор при помощи кнопки 52 пуска (фиг. 9) включает исполнительный орган 47 заданного пути, который при помощи рычага 46 (фиг. 8) и штока 45 переставляет адресователь пути на линию перемещения катка 41 считывателя 12 (фиг. 1). Затем оператор при помощи кнопки 77 пуска (фиг. 14) включает подвижный мостик 5 вперед (на фиг. 1 вверх). При этом промежуточное реле 83 замыкает контакты 83.1, 83.3 и 83.4 и размыкает контакт 83.2 блокировки. При замкнутом контакте 83.3 магнитный пускатель 85 включает толкатель элемента 7 стыкования (фиг. 1) мостика, упоры которого опускаются, освобождая мостик и замыкая предохранительные контакты 88.1-88.2. При наличии замкнутого контакта 83.4 и разомкнутого контакта 84.4 магнитный пускатель 86 включает подвижный мостик вперед. После пуска мостика все операции возвращения грузоносителя с любого заданного пути подвесного склада на монорельсовый путь, включая направление возвращаемого грузоносителя вправо или влево по монорельсовому пути, осуществляются автоматически.
С подходом подвижного мостика к заданному пути подвесного склада каток 41 (фиг. 8) считывателя 12 прокатывается по адресователю пути, вследствие чего рычаг 38 освобождает конечный выключатель 37, контакты которого переключаются. Контакт 37.1 (фиг. 14) выключает стыкующий элемент 7 и электропривод мостика. При этом упоры стыкующего элемента поднимаются и стыкуют мостик с заданным путем подвесного склада. Ввиду того, что на мостике в данный момент грузоноситель отсутствует, то ток управления при помощи контакта 37.2 (фиг. 13) для включения грузоносителя не передается. При стыковке мостика с заданным путем подвесного склада стержень 25 (фиг. 7) стыкоотрывающего элемента 8 (фиг. 1, 2) перемещается влево и кулачок 24 замыкает переключатель 26 режима. Замыкающий контакт 26.2 подключает троллейную секцию 27.1 к шине 28 питания, а размыкающий контакт 26.1 обесточивает троллейную секцию 27.2. Ввиду того, что контакт 74.1 (фиг. 13) является замкнутым, то при подключении троллейной секции 27.1 к электрическому току грузоноситель включается вправо для передвижения на мостик 5. При этом реле 68 времени с определенной выдержкой времени замыкает контакт 68.1. После этого промежуточное реле 65 замыкает контакты 65.1, 65.3, 65.4 и размыкает контакт 65.2 блокировки. При замкнутом контакте 65.3 магнитный пускатель 67 включает толкатель фиксирующего элемента 13 грузоносителя, освобождая грузоноситель и замыкая предохранительные контакты 73.1, 73.2. При наличии замкнутого контакта 65.4 и разомкнутого 66.4 магнитный пускатель 71 включает грузоноситель вправо для перехода его на мостик 5.
При переходе грузоносителя на мостик геркон 17 (фиг. 3, 4) взаимодействует с постоянным магнитом 15.2, вследствие чего замыкается контакт 17.1 (фиг. 13), который выключает реле 74. С выключением реле 74 размыкается контакт 74.1, и электропривод грузоносителя переводится на прежний режим управления. Кроме того, при переходе грузоносителя с путей 2.1 (фиг. 1) подвесного склада на подвижный мостик 5 геркон 19 (фиг. 4, 5) взаимодействует с постоянным магнитом 18.1 (фиг. 1), вследствие чего замыкается контакт 19.1 (фиг. 13), который включает реле 75. При этом реле 75 замыкает контакт 75.1 и подготавливает электропривод грузоносителя для его включения вправо. Аналогично при переходе грузоносителя с путей 2.2 подвесного склада на мостик 5 геркон 22 (фиг. 4, 6) взаимодействует с постоянным магнитом 21.1, вследствие чего замыкается контакт 22.1, который включает реле 76. При этом реле 76 замыкает контакт 76.1 и подготавливает электропривод грузоносителя для его включения влево.
На мостике 5 грузоноситель выключается, а мостик включается в движение назад. Это происходит при взаимодействии копира 58 (фиг. 11, 12) с катком 59. При этом освобождается конечный выключатель 56 и контакт 56.1 (фиг. 13) размыкается, выключая фиксирующий элемент 13 и электропривод грузоносителя, причем грузоноситель точно фиксируется на мостике. С другой стороны, при взаимодействии катка 59 с копиром 58 освобождается конечный выключатель 60 и контакт 60.1 (фиг. 14) замыкается, после чего промежуточное реле 84 замыкает контакты 84.1, 84.3, 84.4 и размыкает контакт 84.2 блокировки. При замкнутом контакте 84.3 магнитный пускатель 85 включает толкатель стыкующего элемента 7 мостика, упоры которого опускаются, освобождая мостик 5 и замыкая предохранительные контакты 88.1, 88.2. При наличии замкнутого контакта 84.4 и разомкнутого контакта 83.4 магнитный пускатель 87 включает мостик 5 назад (на фиг. 1 вниз).
До расстыковки мостика 5 с путем 2.1-2.2 подвесного склада грузоносителя на заданном пути склада остаются на своих местах остановок. При расстыковке стержень 25 (фиг. 7) перемещается вправо и кулачок 24 освобождает переключатель 26 режима движения, вследствие чего троллейная секция 27.1 управления отключается, а троллейная секция 27.2 подключается к шине 28 питания. При этом электрический ток при помощи токоснимателя 36 передается грузоносителю 1, места остановки 3.2, реле времени 68 (фиг. 13) которого с определенной выдержкой времени включает грузоноситель 1. После ухода грузоносителя с места остановки 3.2 освобождается конечный выключатель 29.2, который подключает троллейную секцию 27.3 к шине 28 питания для передвижения грузоносителя с места остановки 3.3 и т. д. Таким образом, после отправления грузоносителя 1 с места остановки 3.1 остальные грузоносители на заданном пути 2.1-2.2 автоматически перемещаются через шаг их расстановки вправо.
При возвращении мостика 5 каток 41 (фиг. 8) считывателя 12 поднимает наклонный участок адресователя 10.1-10.4 (фиг. 1) пути подвесного склада, с которым был стыкован мостик, размыкает контакт 53.1 (фиг. 9) конечного выключателя 53 и выключает исполнительный орган 47 заданного пути. При этом гаснет сигнальная лампа 51 пути и подпружиненный рычаг 46 возвращает адресователь в его первоначальное положение. С приближением мостика 5 к монорельсовому пути 4 (фиг. 1) каток считывателя прокатывается по адресователю 11, вследствие чего подпружиненный рычаг 38 (фиг. 8) освобождает конечный выключатель 37, контакты которого переключаются. Контакт 37.1 (фиг. 14) выключает толкатель стыкующего элемента 7 и электропривод мостика. При этом упоры стыкующего элемента точно стыкуют мостик с линией монорельсового пути 4. Контакт 37.2 (фиг. 13) при помощи проводов 42 (фиг. 8, 11), троллей 43.1, 43.2 токоснимателей 44 включает грузоноситель вправо или влево.
С замыканием контакта 37.2 при наличии замкнутого контакта 75.1 реле 69 времени мгновенно замыкает контакт 69.1 и с определенной выдержкой времени замыкает контакт 69.2. Контакт 69.2 включает промежуточное реле 65, которое включает толкатель фиксирующего элемента 13 и электропривод грузоносителя для передвижения его по монорельсовому пути 4 вправо. Аналогично, с замыканием контакта 37.2 при наличии замкнутого контакта 76.1 реле 70 времени мгновенно замыкает контакт 70.1 и с определенной выдержкой времени замыкает контакт 70.2, который включает грузоноситель для передвижения его по монорельсовому пути 4 влево.
При сходе грузоносителя 1 с мостика 5 вправо на монорельсовый путь 4 геркон 20 (фиг. 4, 5) взаимодействует с постоянным магнитом 18.2 (фиг. 1) замыкает контакт 20.1 (фиг. 13). При этом выключается реле 75, которое размыкает контакт 75.1. Аналогично при сходе грузоносителя 1 с мостика 5 влево на монорельсовый путь 4 геркон 23 (фиг. 4, 6) взаимодействует с постоянным магнитом 21.2 и замыкает контакт 23.1. При этом выключается реле 76, которое размыкает контакт 76.1.
Со входом грузоносителя с мостика 5 на монорельсовый путь 4 завершается цикл движения подвижных объектов - мостика и грузоносителя.
Устройство обеспечивает автоматическое отправление грузоносителей, возвращаемых при помощи подвижного мостика с параллельных путей подвесного склада на монорельсовый путь вправо или влево зависимо от пути склада их поступления. Автоматическое отправление грузоносителей в цехи, расположенные по обе стороны склада, способствует оборудованию универсальных транспортно-складских систем, применяемых в любой отрасли производства, а также хранению в складе продукции различного вида. При помощи этого устройства оборудованный подвесной склад может быть применен для обслуживания ткацкого производства, в котором установлено для 3000 ткацких станков. (56) 1. Авторское свидетельство СССР N 1036634, кл. B 65 G 47/46, 1981.
2. Авторское свидетельство СССР N 812676, кл. B 65 G 47/46, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для адресования грузо-НОСиТЕля | 1979 |
|
SU812676A1 |
| Устройство для управления грузоносителем | 1990 |
|
SU1787899A1 |
| Устройство для управления грузоносителем | 1980 |
|
SU912611A1 |
| Система для распределения грузов по местам назначения | 1982 |
|
SU1131791A1 |
| Устройство для адресования грузоносителя | 1980 |
|
SU931607A1 |
| Устройство для распределения грузов по местам назначения | 1978 |
|
SU753737A1 |
| Устройство для управления грузоносителем | 1982 |
|
SU1036634A1 |
| Устройство для адресования подвижного объекта | 1976 |
|
SU592684A1 |
| Подвесной монорельсовый путь | 1973 |
|
SU441230A1 |
| Устройство для стыковки подвесных кран-балок | 1974 |
|
SU512153A2 |





Сущность изобретения: устройство содержит n грузоносителей 1, n путей подвесного склада 2.1 - 2.2, n мест остановки на путях 3.1 - 3.4, монорельсовый путь 4, подвижный мостик 5, подкрановые пути 6, элемент 7 стыкования, управляемый запорный элемент 8, автоматический запорный элемент 9, копирные адресователи одностороннего воздействия 10.1 - 10.4 и 11, считыватель 12, n элемент 13 фиксирования, n роликов, постоянные магниты 18.1; 18.2; 21.1; 21.2. Устройство содержит два реле. Реле включены в электрическую цепь управления грузоносителем через герконы. Герконы установлены на грузоносителе. Герконы установлены с возможностью взаимодействия с постоянными магнитами. Магниты расположены на стыках путей подвесного склада и монорельсового пути с подкрановыми путями. Магниты установлены с возможностью взаимодействия с мостиком. Контакт каждого реле включен в цепь соответствующего реле времени отправления грузоносителя вправо и влево. 14 ил.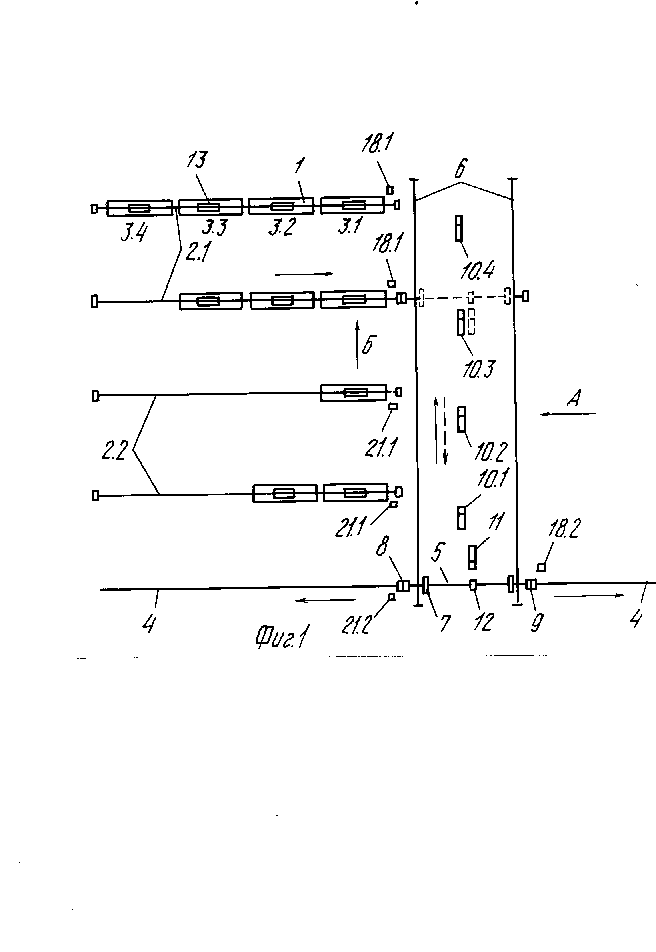
УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ГРУЗОНОСИТЕЛЕМ, содержащее путевые выключатели, расположенные на пути подвесного склада в каждом месте остановки грузоносителя, секционированный в местах остановки троллей, каждая секция которого подключена к шине питания через размыкающий контакт путевого выключателя, элемент фиксирования грузоносителя, переключатель режима движения и копирные адресователи одностороннего действия, установленные с возможностью взаимодействия со считывателем, установленным на мостике и выполненным в виде конечного выключателя, кинематически связанного с подпружиненным рычагом, имеющим на свободном конце каток, причем контакты конечного выключателя считывателя включены в электрические цепи управления грузоносителем и мостиком, механизм взаимопереключения которых содержит конечные выключатели, установленные на грузоносителе и мостике, кинематически связанные с подпружиненными стержнями, на концах которых установлены копир и каток с возможностью взаимодействия друг с другом, а механизм отключения исполнительного органа содержит конечный выключатель, кинематически связанный с адресователем, который установлен с возможностью взаимодействия с катком считывателя при движении мостика назад, отличающееся тем, что, с целью обеспечения автоматического отправления грузоносителя с мостика на монорельсовый путь вправо и влево взависимости от пути склада их поступления, устройство дополнительно снабжено двумя реле с включающими-отключающими обмотками, включенными в электрическую цепь управления грузоносителем через герконы, которые установлены на грузоносителе с возможностью взаимодействия с постоянными магнитами, расположенными на стыках путей подвесного склада и монорельсового пути, которые установлены с возможностью взаимодействия с мостиком, причем контакт каждого реле с включающими-отключающими обмотками включен в цепь соответствующего реле времени отправление грузоносителя вправо и влево.
