Предлагаемое изобретение относится к области автоматического управления и может быть использовано в системах с избыточным количеством датчиков, например акселерометров, отказ одного из которых не должен приводить к отказу системы управления.
Известен способ определения отказавшего датчика, реализованный в [1], включающий измерение каждым датчиком параметра движения и проверку соотношения связи измеренных датчиками параметров движения, характеризующего исправную работу датчиков.
Недостаток этого способа состоит в том, что он предполагает наличие большого количества избыточных датчиков (сверх трех, не расположенных в одной плоскости, и полностью определяющих вектор параметра движения) и не позволяет определить отказавший датчик при любом числе избыточных датчиков, например при одном.
Наиболее близким техническим решением к предлагаемому способу является способ, реализованный в [2], включающий измерение каждым датчиком параметра движения и периодическую с периодом Т0 проверку соотношения связи измеренных каждым датчиком параметров движения, характеризующего исправную работу датчиков.
Недостаток этого способа состоит в том, что он предполагает наличие двух одинаковых избыточных систем с одним избыточным датчиком, что позволяет определять отказавший датчик. Однако этот способ не позволяет определить отказавший датчик в одной избыточной системе с одним избыточным датчиком.
Задача изобретения - расширение функциональных возможностей за счет возможности определения отказавшего датчика в любой избыточной системе.
Эта задача достигается тем, что способ определения отказавшего датчика в избыточной системе, включающий измерение каждым датчиком параметра движения, периодическую с периодом Т0 проверку соотношения связи измеренных параметров движения, характеризующего исправную работу датчиков, предполагает в момент времени ti=i·T0, где i=1, 2, 3,... нарушения соотношения связи измеренных параметров движения, проведение сравнения показаний аi каждого датчика на момент времени ti с показаниями а(i-1) того же датчика на момент времени T(i-1)=(i-1)·Т0 путем нахождения разности этих показаний Δai=(ai-a(i-1)) и определение отказавшего датчика, для которого разность Δai превышает заданное значение.
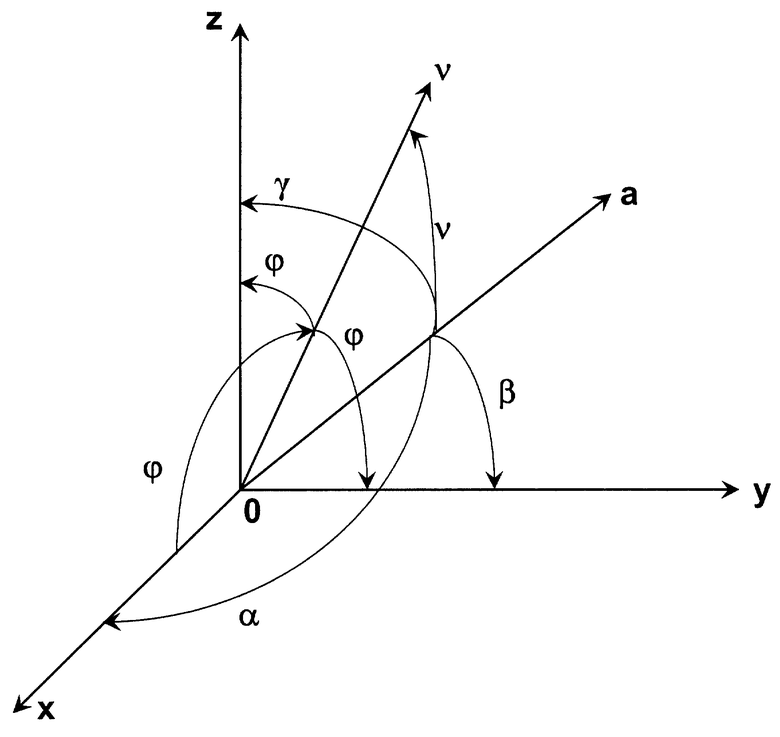
На чертеже приведена координатная схема, поясняющая расположение измерительных осей датчиков и направления измеряемого параметра. На этой схеме: x, у, z, v - направление измерительных осей датчиков, а – направление измеряемого параметра, α, β, γ, ν - углы между направлением а соответственно измерительными осями х, у, z, v, ϕ - угол между направлением измерительной оси v и измерительными осями x, у, z.
Реализацию предлагаемого способа определения отказавшего датчика рассмотрим на примере системы с одним избыточным датчиком - акселерометром при управлении движением твердого тела (космического аппарата). В общем случае система из трех акселерометров, измерительные оси которых не лежат в одной плоскости, полностью определяет вектор линейного ускорения космического аппарата а. Избыточная система содержит на один датчик больше – четыре акселерометра, при этом ни какие три датчика из четырех не лежат в одной плоскости. При отказе одного из четырех датчиков в такой системе существует возможность замены этого датчика, используя показания остальных исправно работающих трех датчиков.
Пусть избыточная система содержит четыре датчика (чертеж), измерительные оси которых направлены по координатным осям х, у, z, v, при этом оси х, у, z взаимно перпендикулярны, а ось v направлена по диагонали куба, ребра которого совпадают с осями x, у, z. Предположим также, что вектор измеряемого параметра (ускорения) а составляет с осями х, у, z, v соответственно углы α, β, γ, ν, а угол между осью v и осями x, у, z равен ϕ. Показания датчиков каждой измерительной оси будут соответственно равны

В этом случае вектор а можно представить в виде

Спроектируем вектор а на ось v. В результате будем иметь

Введем в рассмотрение соотношение связи параметров движения в виде (4)

Как следует из (1) и (3), величина R равна нулю (близка к нулю), если все четыре датчика исправны. В случае отказа датчика величина R не равна нулю (больше некоторого заданного значения), что свидетельствует о неисправности в системе из четырех датчиков.
Осуществим периодическую с периодом Т0 проверку соотношения связи параметров движения (4) на равенство нулю (на принадлежность к заданному интервалу) величины R. Выберем период Т0 таким, чтобы изменение измеряемого параметра (ускорения а) было незначительным и не превышало некоторого заданного значения Δ. Пусть в некоторый момент времени Ti=i·T0 (i=1, 2,3...) произошло нарушение соотношения связи (4), при котором величина R вышла за пределы дозволенных значений. Зафиксируем показания датчиков аi на момент времени ti и показания датчиков а(i-1) на момент времени t(i-1)=(i-1)·Т0. Найдем разность Δai в виде

До момента времени Ti значение Δai для каждого из датчиков было меньше заданного значения Δ. В момент времени ti для исправно работающих датчиков это значение также останется меньше заданного значения Δ. Для отказавшего датчика значение Δai выйдет за пределы дозволенных значений Δ, что является критерием определения отказавшего датчика. После выявления отказавшего датчика его замену можно произвести путем определения из соотношения (4) его показаний, используя показания других трех исправно работающих датчиков.
Таким образом, рассмотренный способ определения отказавшего датчика в избыточной системе позволяет определить отказавший датчик при любом числе избыточных датчиков, что расширяет функциональные возможности системы управления.
Предлагаемая совокупность признаков в рассмотренных авторами решениях не встречалась для решения поставленной задачи и не следует явным образом из уровня техники, что позволяет сделать вывод о соответствии технического решения критериям “новизна” и “изобретательский уровень”. Реализация способа определения отказавшего датчика предполагает проведение стандартных операций фиксации параметров, их сравнение с заданным значением и по результатам сравнения определение отказавшего датчика.
Литература.
1. Авторское свидетельство СССР N 613291 от 7. 03. 78, кл. G 05 B 15/02, G 05 D 1/02.
2. Авторское свидетельство СССР N 489078 от 30. 06. 75, кл. G 05 B 15/02, G 05 D 1/02.
Изобретение относится к области автоматического управления и может быть использовано в системах с избыточным количеством датчиков, например акселерометров, отказ одного из которых не должен приводить к отказу системы управления. Технический результат изобретения заключается в расширении функциональных возможностей за счет возможности определения отказавшего датчика в любой избыточной системе. Способ определения отказавшего датчика в избыточной системе основан на периодической проверке соотношения связи измеренных параметров движения, характеризующего исправную работу датчиков, фиксации момента нарушения соотношения связи, сравнении показаний датчиков на этот момент и на момент, предшествующий моменту нарушения соотношения, и определении по результатам сравнения отказавшего датчика. 1 ил.
Способ определения отказавшего датчика в избыточной системе, включающий измерение каждым датчиком параметра движения, периодическую с периодом Т0, выбранным таким образом, чтобы изменение измеряемого параметра не превышало заданного значения Δ, проверку соотношения связи измеренных параметров движения, характеризующего исправную работу датчиков, отличающийся тем, что в момент времени Ti=i·T0, где i = 1, 2, 3, ....., нарушения соотношения связи измеренных параметров движения производят сравнение показаний аi каждого датчика на момент времени Ti с показаниями a(i-1) того же датчика на момент времени t(i-1)=(i-1)·Т0 путем нахождения разности этих показаний Δai=(ai-а(i-1)) и определение отказавшего датчика, для которого разность Δai превышает заданное значение.
| Устройство для управления пространственным положением объекта | 1976 |
|
SU613291A1 |
| Система управления пространственным положением объекта | 1974 |
|
SU489078A1 |
| RU 2063647 C1, 10.07.1996 | |||
| US 3403874 A, 01.10.1968 | |||
| US 4851985 A, 25.07.1989. | |||

