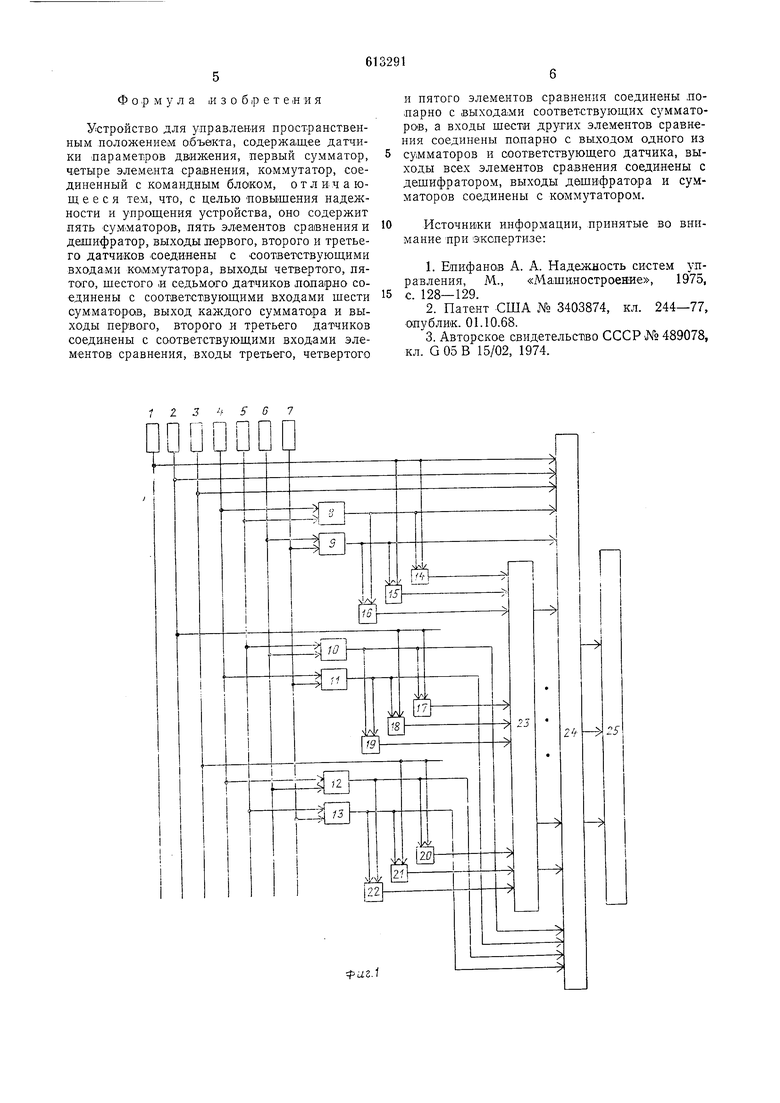
Устройство содержит датчики /-7 параметров движения, сумматоры 8-13, элемеиты 14-22 срааксния, дешифратор 23, ком|мутатор 24, кома.ндное устройство 25. На фиг. 2 показана схема раопололсения осей чувствительности датчиков. Приняты следующие о.бозначевия: X, Y, Z - главные оси инерции объекта управления; PI-Р - направления осей чувствительности датчиков, не совпадающие с главными осями инерции (составляют с главными осями инерции одииаковые углы а в различных квадрантах). Ра|ботает устройство следующим образом. Датчики /-3 измеряют параметр движения относительно осей X, Y, Z соответствеино, датчики 4-7 - параметр движения относительно осей соответственно. Как следует из фиг. 2, между сигналами датчиков сзщеслвуют соотношения X+Y + Z , Z - А - } ZH-y-X 5; где X, Y, Z, PI, PZ, РЗ, Р4 - сигналы с датчиков 1-7 соответственно; К cos а - Из приведенных соотношений непосредственно следует р рр р Уf . у А . . 2К IK р рр р у . у 1i . - 2Л- 2ЛЯ, + РЗ .7 - 2К 2ЛСигналы с датчиков 4-7 попарно поступают Ба сумматоры 8-13, выходной сигнал которых, в соответствии с приведенными выражениями, характеризует движе.кия объекта относительно осей X, У и Z. Все имеющиеся Значения параметра движения объекта огносительно осей X, У, Z (либо измеренные датчиками ./-3, либо (полученные на сумматорах) попадают на ком-мутатор 24 и одновременно «а элементы сравнения, где значения одного и того же параметра лопарно сравниваются амежду собой. При отказах датчиков состояние элементов сравнения меняется. Пусть состояние «О элемента сра;внения соответствует совпадению ностхэдающих на него сигналов, состояние «1 - несовпадению их. Таким образом, выходные сигналы элементов сравнения обрауют девятиразрядный двоичный код, харакеризующий достоверность показаний датчиков. Сигналы с элементов сравнения подаются на дешифратор 2k, который в зависимости от кода выдает в коммутатор 24 команду на подключение сигнала о параметре движения объекта к командному устройству. Любому отказу одного или двух датчиков соотетствует .код (состояние элементов сравнения), однозначно определяющий отказ датчика. Однозначность кода вытекает из следующего (в дальнейшем, для краткости, датчики, ось чувствительности которых совладает с главной осью инерщии О1бъекта, будем называть ортогональными, остальные - неортогональными). Состояние каждого разряда кода аиределяется либо сигналами четырех неортогональных датчиков, либо сигналами трех датчиков, один из которых ортогонален, а два - неортогональны, при этом все такие пары неортогональных датчиков различны между собой. Рассмотрим случай отказа двух датчиков (так как случай отказа одного датчика намного проще). Здесь воз-можны три варианта. Отказали два ортогональных датчика. В этом случае фиксируется несовпадение сигналов только в тех разрядах кода, где ишользуются сигналы отказа1вщих ортогональных датчиков. Во всех разрядах, в которых используютоя сигналы четырех неортогональных датчиков, фиксируется совладение сигналов (четыре разряда - в состоянии «1, пять разрядов - в состоянии «О). Отказали один ортогональный и один неортогональный датчики. Совпадение сигналов при этом фиксируется только в тех разрядах, где сигналы двух иаправных ортогональных датчиков сравниваются с сигналами двух пар исправных неортогональных датчиков (поскольку такие пары различны, тем самым определяются три исправных неортогональных датчика). Семь разрядов кода будут в состоянии «1, два разряда - в состоянии «О. Отказали два неортогональных датчика. В этом случае совиадение сигналов фиксируется только в том разряде, где ортогональный датчик сравнивается с единственной исправной парой неортогональных датчиков (восемь разрядов - в состоянии «1, один разряд - в состоянии «О). Таким о|бразом, устройство сохраняет свою р,аботоапособ:ность при отказе, в том числе и одновременном, двух любых датчиков. Применение изобретения позволяет снизить избыточность датчиков параметра движения и тем самым упростить систему управления, повысить ее надежность при одновременных отказах датчиков.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система управления пространственным положением объекта | 1974 |
|
SU489078A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТКАЗАВШЕГО ДАТЧИКА В ИЗБЫТОЧНОЙ СИСТЕМЕ | 2006 |
|
RU2344459C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТКАЗАВШЕГО ДАТЧИКА В ИЗБЫТОЧНОЙ ИЗМЕРИТЕЛЬНОЙ СИСТЕМЕ | 2008 |
|
RU2382391C2 |
| Система коммутации | 1989 |
|
SU1702384A1 |
| Трехкомпонентный измеритель угловой скорости | 2023 |
|
RU2803452C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТКАЗАВШЕГО ДАТЧИКА В ИЗБЫТОЧНОЙ СИСТЕМЕ | 2006 |
|
RU2359307C2 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ СИСТЕМЫ УПРАВЛЕНИЯ ПОДВИЖНОГО АППАРАТА | 2012 |
|
RU2493578C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОТКАЗАВШЕГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ В ИЗБЫТОЧНОЙ СИСТЕМЕ | 2008 |
|
RU2403609C2 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1997 |
|
RU2113004C1 |