Изобретение относится к измерительной технике и может быть использовано для определения погрешностей инерциальных измерительных приборов, в частности лазерных гироскопов и маятниковых акселерометров, при стендовых испытаниях на ударные и вибрационные воздействия.
Известен способ измерения [RU 2366961 C1, G01P 15/13, 10.09.2009], заключающийся в том, что ускорение преобразуют в отклонение подвижной системы акселерометра с последующим преобразованием отклонения в электрический сигнал, его усиливают и преобразуют в последовательность временных интервалов, сформированных с помощью источника стабилизированного тока и элементов нелинейного звена в виде широтно-модулированного сигнала, который преобразуют в момент импульсной отрицательной обратной связи при помощи датчика момента, а сигналы импульсной отрицательной обратной связи преобразуют в сигнал, модулированный счетными импульсами, поступающими от генератора импульсов стабилизированной частоты fc, с последующим измерением числа счетных импульсов n1i и n2i, которые преобразуют в выходные сигналы акселерометра в виде разности Δni=n1i-n2i, суммы ni=n1i+n2i=fcTi и отношения числа импульсов Ni=Δni/ni, причем величину и знак входного воздействия aвх=ai+Δai, соответствующего измеряемым ускорению ai, и погрешностям Δai, определяют по окончании каждого i-того периода Ti автоколебаний с помощью выходного сигнала и по формуле Ni=Ki(ai+Δai), (i=1--- ∞), где Ki=ml/KдмI0 - коэффициент преобразования входного воздействия, ml - маятниковый момент подвижной системы, Kдм и I0 - коэффициент передачи датчика момента и поступающий от стабилизированного источника ток, величина которого ограничивает диапазон измеряемого ускорения, при этом коэффициент преобразования Ki, погрешность, например смещение нуля Δai=Δa0, их стабильность, определяют при помощи формулы Nik=Kaik(ai+Δa0), градуировочную характеристику и ее нестабильность (нелинейность) при помощи другой формулы Nij=Кaij(aij+Δa0j) определяют заранее и каждую раздельно по результатам калибровки в условиях гравитационного поля Земли при вертикальном и горизонтальном положениях измерительной оси акселерометра, причем измерения каждой технической характеристики выполняют на интервале времени сотен периодов автоколебаний, чтобы применить статистическую обработку и фильтрацию результатов измерений, которые используют при измерении ускорения, причем на основе заданного значения линейности градуировочной характеристики, полученного и паспортизованного в результате калибровки акселерометра на заводе-изготовителе в условиях его прецизионного оборудования и заданного диапазона измеряемого ускорения, проводят калибровку акселерометра на том же диапазоне в условиях гравитационного поля Земли при вертикальном положении измерительной оси акселерометра и на интервале времени в несколько сотен периодов автоколебаний путем измерения ускорения известной величины, при этом коэффициент преобразования, погрешность смещения нуля и их стабильность, соответствующие заданному диапазону измеряемого ускорения определяют одновременно при коротком по времени однократном измерении двух известных величин входного ускорения, соответствующих границам заданного диапазона aвх1=+amax+Δa0 и aвх2=+amax+Δa0 с учетом смещения нуля, полученные значения выходных сигналов Nmax1=Ka1(+amax+Δa0), -Nmax2=Ka2(-amax+Δa0) суммируют алгебраически и делят на удвоенное значение ускорения границы заданного диапазона (Nmax1-(-Nmax2))/2amax=Ka, а затем суммируют арифметически и делят пополам (Nmax1+(-Nmax2)/2=KaΔa0, определяют значения: коэффициента преобразования Ka погрешности смещения нуля на выходе ΔN0=KaΔa0 и на входе Δa0=ΔN0/Ka, измеренную погрешность смещения нуля компенсируют алгоритмическим образом до уровня остаточной на выходе ΔΔN0, соответствующей остаточной погрешности смещения нуля ΔΔa0=ΔΔN0/Ka на входе, повторяют измерения ускорения известной величины на границах заданного диапазона вышеуказанным способом с учетом скомпенсированной погрешности смещения нуля и вычисления с использованием полученных значений выходных сигналов 







Недостатком этого технического решения является относительно узкая область применения, обусловленная невозможностью проведения измерений в условиях механических ударов и вибраций.
Известен также способ [RU 2140059 C1, G01C 21/18, 20.10.1999], включающий получение данных о местоположении и скорости, определение поправок к выходным параметрам инерциальной гироскопической системы выработку корректирующих сигналов и ввод их в инерциальную гироскопическую систему, при этом непрерывно сравнивают измеряемый и измеренный ранее профили рельсовой колеи в продольном направлении, в вертикальной плоскости и по взаимному положению рельсовых нитей в поперечной плоскости, а поправки к выходным параметрам инерциальной навигационной системы определяют при обработке полученных при сравнении результатов с одновременным выделением деформации рельсовой колеи, при этом корректирующие сигналы вводят в инерциальную гироскопическую систему непрерывно.
Недостатком этого технического решения также является относительно узкая область применения, вызванные необходимостью при испытаниях иметь специальную рельсовую колею, а также невозможностью проводить измерения при заданных механических ударах и вибрациях.
Наиболее близким по технической сущности к предложенному является способ [RU 2381511 C1, G01P 21/00, 10.02.2010], включающий определение характеристик унифицированных систем позиционирования на основе микромеханических акселерометров и гироскопов в условиях одновременного воздействия на него динамических в виде линейной перегрузки, или синусоидальной вибрации, или одиночных ударных импульсов, а также температурных испытательных параметров, основанный на том, что воздействие всех динамических параметров задают с помощью одного поворотного стенда, при этом воздействие линейной перегрузки обеспечивают созданием нормального ускорения, величина которого определяется соотношением: aп=ω2·R, где aп - нормальное ускорение, пропорциональное угловой скорости вращения поворотной платформы стенда, ω - угловая скорость вращения поворотной платформы, R - расстояние от оси вращения поворотной платформы до места установки испытуемого прибора, воздействие синусоидальной вибрации обеспечивают созданием тангенциального ускорения, величина которого определяется соотношением: ar=∈·R, где ar - тангенциальное ускорение, пропорциональное угловому ускорению поворотной платформы, ∈_∈(t)=E·sin(2pv·t) - задаваемое угловое ускорение поворотной платформы, R - расстояние от оси вращения поворотной платформы до места установки испытуемого прибора, Е - амплитуда углового ускорения, v - частота углового ускорения, t - время, воздействие кратковременного одиночного ударного импульса обеспечивают созданием углового ускорения поворотной платформы стенда в виде половины периода синусоиды.
Недостатками наиболее близкого технического решения являются его относительно низкая точность, поскольку при определении точностных характеристик устройств не учитываются погрешности, возникающие из-за колебательно-вращательного движения стенда, а также относительно узкая область применения способа, обусловленная тем, что он не позволяет использовать его для определения смещений нулей гироскопов.
Задачей, на решение которой направлено изобретение, является повышение точности определения погрешностей инерциальных измерительных приборов в условиях ударных и вибрационных воздействий.
Требуемый технический результат заключается в повышении точности определения погрешностей инерциальных измерительных приборов при стендовых испытаниях в условиях ударных и вибрационных воздействий путем учета погрешностей, вызванных колебательно-вращательным движением стенда.
Поставленная задача решается, а требуемый технический результат достигается тем, что в способе определения погрешностей инерциальных измерительных приборов (преимущественно гироскопов и акселерометров) при испытаниях на ударные и вибрационные воздействия, основанном на оценке погрешностей измерений по исходным данным, полученным по результатам измерений показаний инерциальных измерительных приборов, согласно предложенному изобретению, измерение показаний инерциальных измерительных приборов производят в три этапа с одинаковой продолжительностью по времени при различной для каждого из этапов пространственной ориентации инерциальных измерительных приборов, причем на первом этапе производят измерение показаний инерциальных измерительных приборов для определения начальной ориентации и интегрирования уравнения навигации, на втором этапе производят измерение показаний инерциальных измерительных приборов для интегрирования уравнений навигации, когда инерциальные измерительные приборы подвергают ударным и/или вибрационным воздействиям, а на третьем этапе производят измерение показаний инерциальных измерительных приборов для начальной ориентации и интегрирования уравнения навигации после ударных и/или вибрационных воздействий, при этом для расчета смещений нулей инерциальных измерительных приборов до ударных воздействий используют величины lx, ly, lz, рассчитанные по уходам координат и углов ориентации относительно начальной матрицы 

 ;
;  ,
,  ; Δsαz=2·B1z, Δsαy=2·B1y'.
; Δsαz=2·B1z, Δsαy=2·B1y'.
На чертеже представлены:
на фиг.1 - циклограмма проведения измерений показаний приборов;
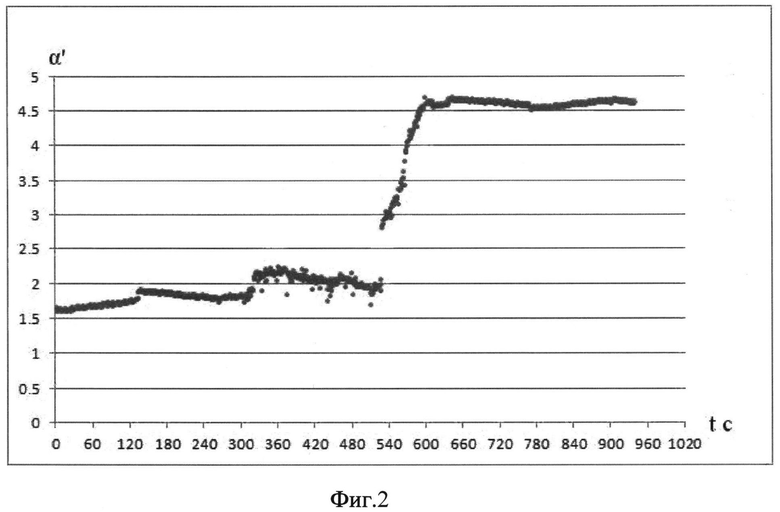
на фиг.2 - зависимость от времени параметра ориентации α;
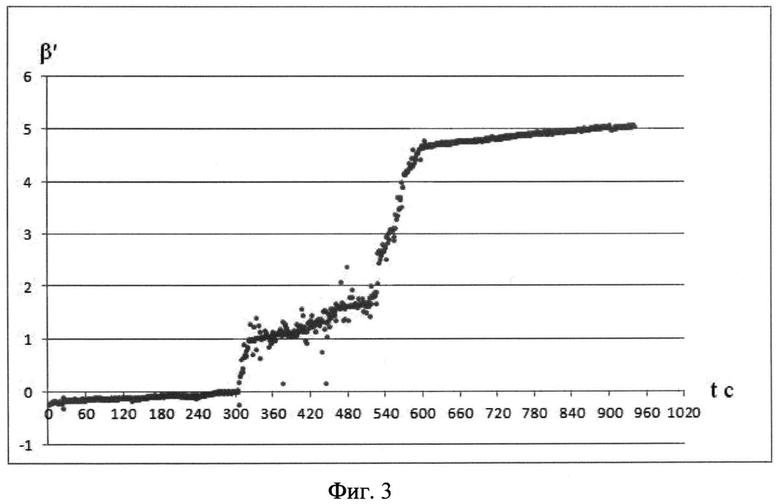
на фиг.3 - зависимость от времени параметра ориентации β;
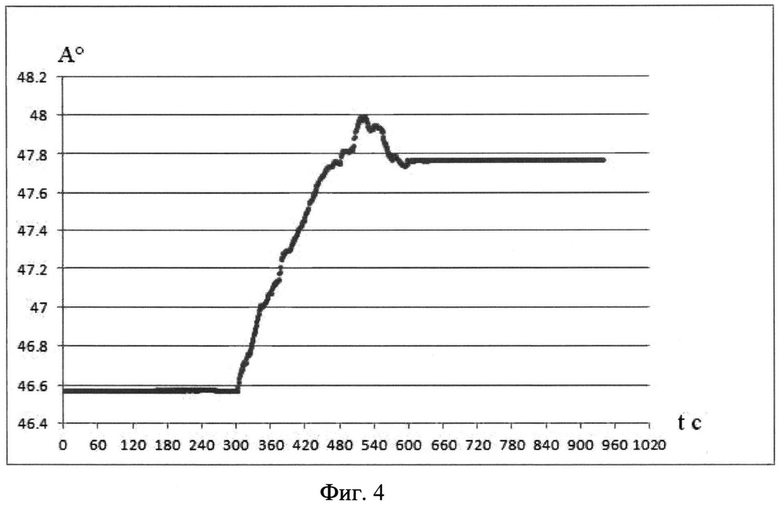
на фиг.4 - зависимость от времени параметра ориентации А;
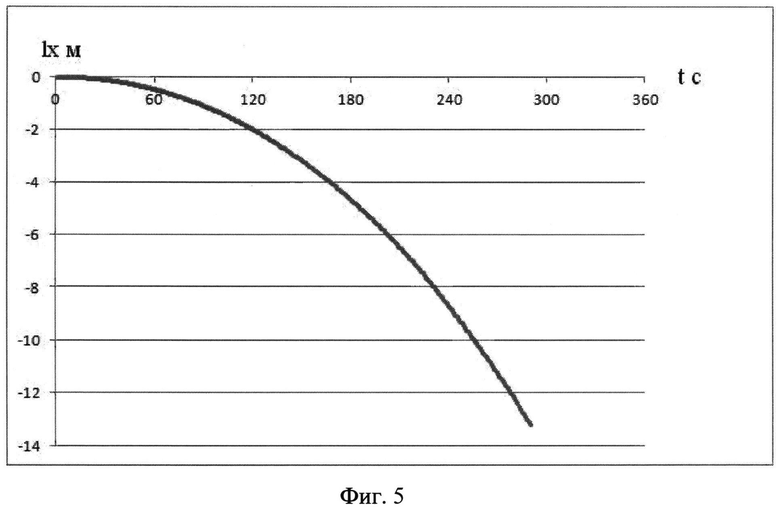
на фиг.5 - временная зависимость ухода линейной координаты 1x на интервале T1;
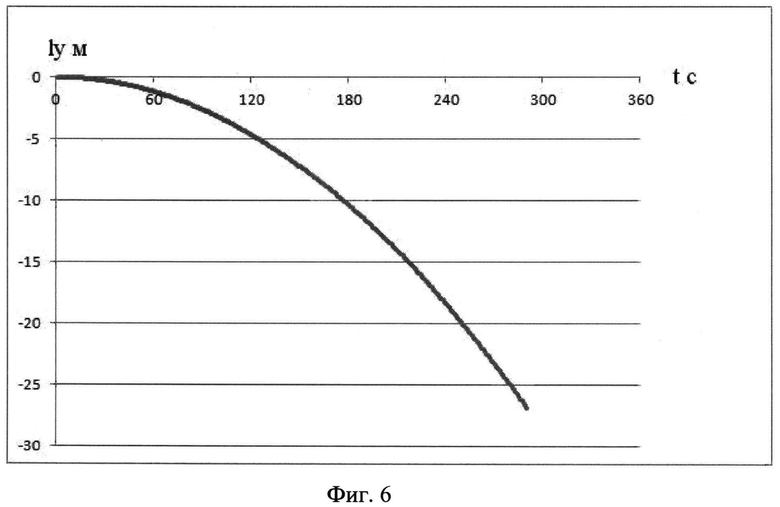
на фиг.6 - временная зависимость ухода линейной координаты 1y на интервале T1;
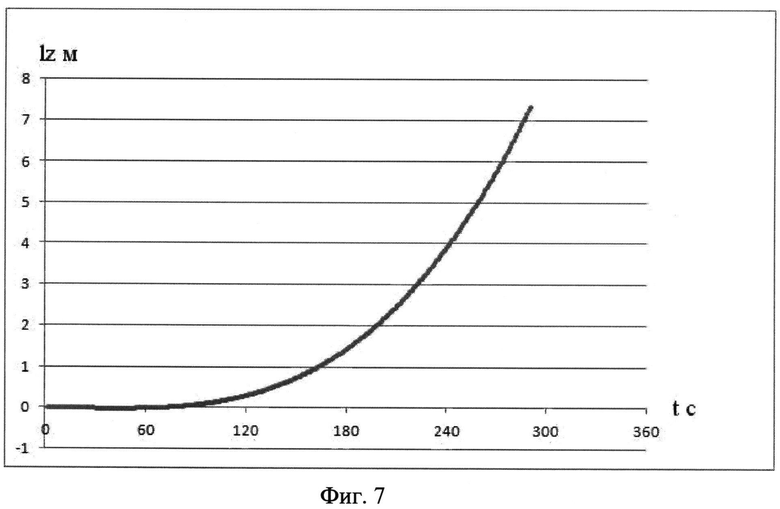
на фиг.7 - временная зависимость ухода линейной координаты 1z на интервале T1;
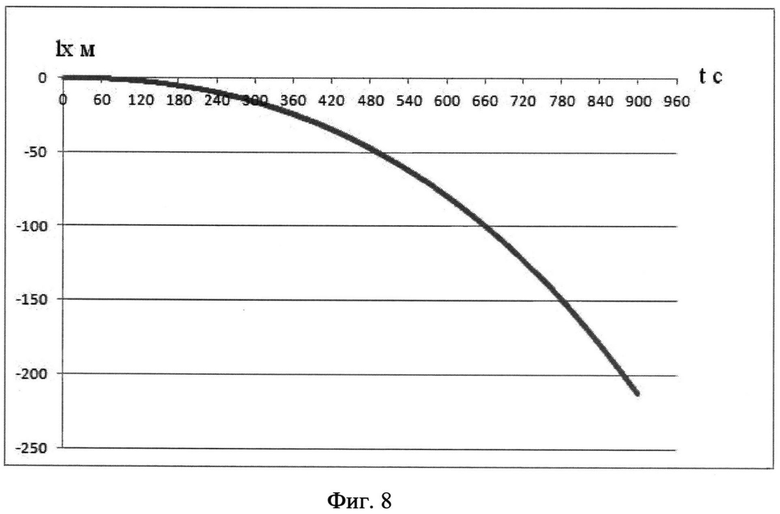
на фиг.8 - временная зависимость ухода линейной координаты 1x на интервале T1-Т3;
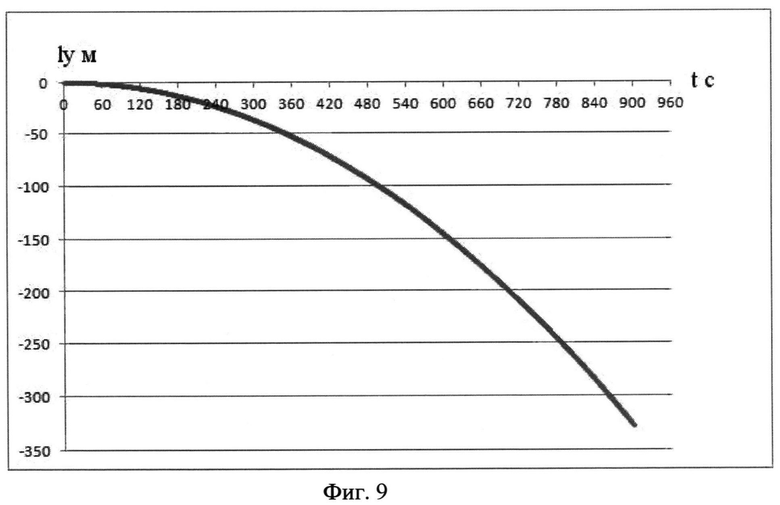
на фиг.9 - временная зависимость ухода линейной координаты 1y на интервале T1-Т3;
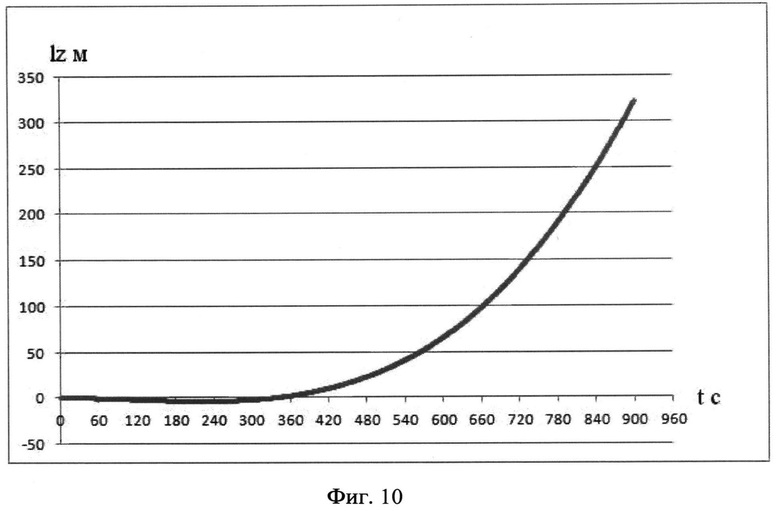
на фиг.10 - временная зависимость ухода линейной координаты 1z на интервале T1-Т3.
Способ определения погрешностей инерциальных измерительных приборов при испытаниях на ударные и вибрационные воздействия реализуется и обосновывается следующим образом.
Способ позволяет обеспечить компенсацию колебательно-вращательных движений ударных и вибрационных стендов таким образом, чтобы во время механических воздействий оценивались только реальные погрешности инерциальных измерительных блоков (приборов) (ИИБ), в частности смещения нулей лазерных гироскопов (ЛГ) и маятниковых акселерометров (МА), вследствие ударных и вибрационных воздействий, в то время как кажущиеся погрешности из-за паразитных колебаний и вращений практически исключаются.
Измерения проводятся в раздельном масштабе времени: вначале проводится запись показаний ИИБ (далее исходные данные - ИД) по заданной циклограмме, а затем обработка данных.
Функционирующий ИИБ устанавливается и закрепляется на испытательном стенде.
Измерения проводятся по циклограмме, приведенной на фиг.1. Интервалы Т1, Т2 и T3 выбираются равными. Их оптимальное значение 5 мин. Меньшее значение интервала подвержено искажениям из-за случайного характера ошибок измерений, а увеличение интервала приводит к неоправданному увеличению используемых ресурсов. В интервале Т1=5 мин проводится запись ИД для начальной выставки (определения начальной ориентации) и интегрирования уравнений навигации, в интервале Т2=5 мин проводится запись ИД для интегрирования уравнений навигации, когда ИИБ подвергается ударным или вибрационным воздействиям, в интервале Т3=5 мин проводится запись ИД для повторной выставки ориентации и интегрирования уравнений навигации после ударных воздействий. Запись ИД проводится при трех различных положениях ИИБ, при этом оси связанной с корпусом системы координат (СВСК) ориентируются так, чтобы ось СВСК была ориентирована вертикально вверх, а оси Xp и Zp ориентированы произвольно в плоскости, близкой к горизонтальной.
При необходимости провести испытания ИИБ при ориентации вертикально вверх других осей, производится переприсвоение наименований этих осей так, чтобы в расчетах всегда вверх была направлена ось Yp.
Для проведения расчетов введятся три системы координат.
ИИБ отождествляют с ортогональной декартовой системой координат 0p, Xp, Yp, Zp, жестко связанной с ИИБ (СВСК).
Стенд отождествляют с ортогональной декартовой системой координат 0ст, Xст, Yст, Zст, жестко связанной со стендом - связанная топографическая система координат (СТСК).
Угловые и линейные смещения систем координат СВСК и СТСК определяют относительно геодезической системы координат в данной точке земного сфероида (ГСК), ось Xг которой направлена на Север, ось Yг - вверх по нормали к земному сфероиду, ось Zг - на Восток.
Текущая ориентация СВСК, первоначально совмещенной с ГСК, получается путем трех последовательных поворотов на углы, именуемые параметрами ориентации:
- поворот на угол Az (азимут) вокруг оси Yp СВСК, совпадающей с осью Yг ГСК.
- поворот на угол α (крен) вокруг нового положения оси Xp СВСК.
- поворот на угол β (тангаж) вокруг нового положения оси Zp СВСК.
При таком определении СВСК смена позиций а, б, в означает, что по оси ударных воздействий, ориентированной вдоль оси Yг, выставляются поочередно все ЛГ, а алгоритмы и программы начальной выставки и интегрирования уравнений навигации, полученные для позиции 6, остаются неизменными.
Для неподвижной системы показания МА складываются из проекций вектора ускорения силы тяжести Земли 
Проекции вектора 

где αxp, yp, zp - показания акселерометров, считываемые с осей СВСК.
D0 - истинная матрица ориентации СВСК относительно ГСК.
[cαij] - матрица ориентации осей чувствительности МА относительно СВСК (далее матрица конструктивной привязки акселерометров).
[Δcaij] - матрица погрешности измерения матрицы [cαij].

Интегрирование уравнений навигации, в пределах данной методики, осуществляется на осях ГСК.
Проекции показаний акселерометров на оси ГСК определяются из (1) соотношениями

где D - текущее значение матрицы ориентации СВСК относительно ГСК, вычисленное по показаниям ЛГ.
В алгоритме интегрирования уравнения ориентации, используемом в данной методике, проекции вектора вращения Земли вычитаются из показаний ЛГ, так что матрица D имеет вид

где  - кососимметричная матрица, составленная из смещений нулей Δsqx,y,z
- кососимметричная матрица, составленная из смещений нулей Δsqx,y,z

t - текущее время, отсчитываемое от начала интегрирования.
ΔD - кососимметричная матрица, составленная из погрешностей определения параметров ориентации, возникающих при начальной выставке
Погрешности Δβ и Δα определяются соотношениями

 ;
;
Из (2) с учетом (3), (4), (5) следует

Расписав (7) в скалярной форме в линейном приближении, получаем
Из (8) с учетом соотношений (6) получаем
Проинтегрировав уравнения (9) дважды, получаем соотношения для
уходов координат lx и lz, обусловленных инструментальными погрешностями ИИБ:
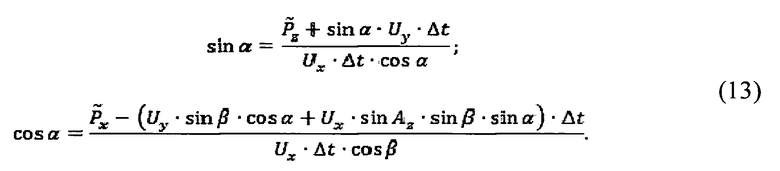
По ИД, полученным в интервале T1, вычисляются усредненные за время T1 показания ЛГ и матрица начальной ориентации 
Усредненные значения определяются соотношениями:
где 
Px,y,z,i - показания датчиков ЛГ на i-м шаге съема информации;

αx,y,z,i - показания акселерометров на i-м шаге съема информации;
Δt - временной шаг съема информации.
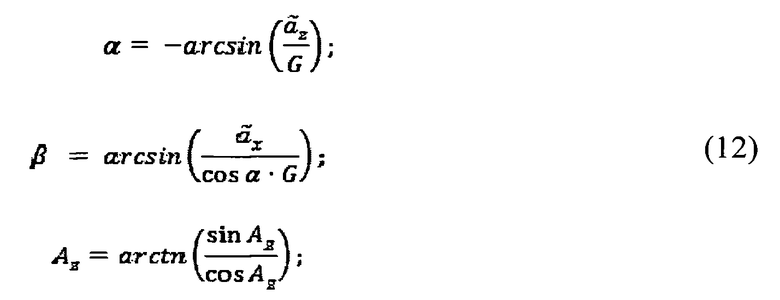
Параметры ориентации Az, α, β вычисляются по алгоритмам:
Матрица ориентации 

По исходным данным, полученным в интервалах T1, T2, T3, и воспользовавшись начальной ориентацией (14), проводят интегрирование уравнений навигации во всем интервале измерений от t=0 до t=T1+T2+T3.
К результатам интегрирования применяют сглаживающий фильтр:
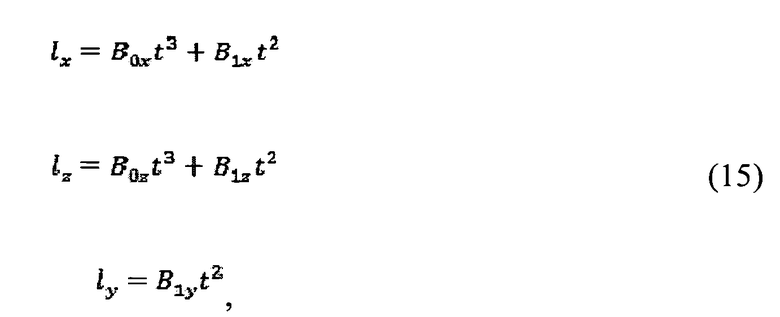
коэффициенты которого B0x,z, B1x,z, B1y определяются на каждом шаге интегрирования рекуррентной процедурой метода наименьших квадратов (МНК).
Из соотношений (10) и (15) следует:
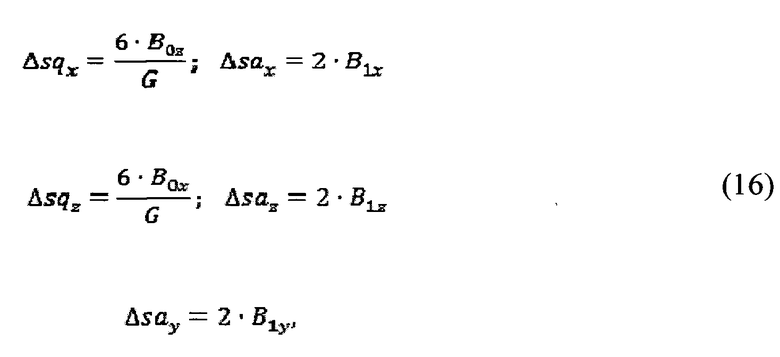
Соотношения (15) и (16) вычисляются в конце каждого временного интервала.
По ИД, полученным в интервале Т3, после интервала ударных воздействий, выполняют повторную выставку ориентации по соотношениям (11)-(14) и определяют матрицу 
Для расчета смещений нулей гироскопов и акселерометров до ударных воздействий, во время ударных воздействий и после ударных воздействий используют формулы (15) и (16).
Причем для расчета смещений нулей ЛГ и МА до ударных воздействии используют величины lx, ly, lz, рассчитанные по уходам координат, и углов ориентации относительно начальной матрицы 
Для расчета смещений нулей ЛГ и МА после ударных воздействий используются величины lx, ly, lz, рассчитанные по уходам координат, и углов ориентации относительно начальной матрицы 
Для расчета смещений нулей ЛГ и МА во время ударных воздействий используются величины lx, ly, lz, рассчитанные по уходам координат, и углов ориентации относительно начальной матрицы 
Все расчеты уходов производятся по модулю.
Экспериментальная проверка способа.
Исходные данные (ИД) при экспериментальной проверке способа записывали с использованием стенда, имеющего разметку для установления ИИБ (СВСК) по известному азимуту А=0,812842 рад.
На фиг.2, 3, 4 приведены графики временной зависимости угловых координат α, β, A, полученных интегрированием уравнения вращения по показаниям датчиков ЛГ. Из графиков видно, что в интервале T2 имеют место угловые смещения координат ИИБ (т.е. СВСК относительно ГСК) по всем трем координатам. Это обусловлено тем, что ИИБ не закреплен жестко на стенде, и поэтому имеют место смещения изделия в момент ударных воздействий.
Вычисленные смещения, приведенные на графиках фиг.2, соответствуют реальным смещениям оптического элемента (ОЭ), оси которого определяют СВСК, относительно своего первоначального положения.
На фиг.5-10 приведены графики временной зависимости уходов линейных координат lx, ly, lz, полученные интегрированием уравнения навигации по показаниям датчиков ЛГ и МА, с последующим использованием математических фильтров (15). На фиг.5-7 приведены графики, полученные по измерениям в интервале на фиг.8-10 по измерениям во всем интервале T1+Т2+Т3.
Вычисления по соотношениям (16) приводят к результатам на интервале T1:

на интервале T3:

на полном интервале T1+T2+T3:

Результаты, полученные по ИД в интервале Т1+Т2+Т3, незначительно отличаются от результатов, полученных в интервале T1.
Результаты экспериментальной проверки подтвердили устойчивость способа к поворотам ИИБ в процессе испытаний вокруг любой из осей. Вычисленные ошибки адекватно отражают реальные погрешности гироскопов и акселерометров до, во время и после вибрационных и ударных воздействий.

Изобретение относится к измерительной технике и может быть использовано для определения погрешностей инерциальных измерительных приборов, в частности лазерных гироскопов и маятниковых акселерометров, при стендовых испытаниях на ударные и вибрационные воздействия. Технический результат - повышение точности. Для этого измерение показаний инерциальных измерительных приборов производят в три этапа с одинаковой продолжительностью по времени при различной для каждого из этапов пространственной ориентации инерциальных измерительных приборов, причем на первом этапе производят измерение показаний инерциальных измерительных приборов для определения начальной ориентации и интегрирования уравнения навигации, на втором этапе производят измерение показаний инерциальных измерительных приборов для интегрирования уравнений навигации, когда инерциальные измерительные приборы подвергают ударным и/или вибрационным воздействиям, а на третьем этапе производят измерение показаний инерциальных измерительных приборов для начальной ориентации и интегрирования уравнения навигации после ударных и/или вибрационных воздействий. 10 ил.
Способ определения погрешностей инерциальных измерительных приборов при испытаниях на ударные и вибрационные воздействия, основанный на оценке погрешностей измерений по исходным данным, полученным по результатам измерений показаний инерциальных измерительных приборов, отличающийся тем, что измерение показаний инерциальных измерительных приборов производят в три этапа с одинаковой продолжительностью по времени при различной для каждого из этапов пространственной ориентации инерциальных измерительных приборов, причем на первом этапе производят измерение показаний инерциальных измерительных приборов для определения начальной ориентации и интегрирования уравнения навигации, на втором этапе производят измерение показаний инерциальных измерительных приборов для интегрирования уравнений навигации, когда инерциальные измерительные приборы подвергают ударным и/или вибрационным воздействиям, а на третьем этапе производят измерение показаний инерциальных измерительных приборов для начальной ориентации и интегрирования уравнения навигации после ударных и/или вибрационных воздействий, при этом для расчета смещений нулей инерциальных измерительных приборов до ударных воздействий используют величины lx, ly, lz, рассчитанные по уходам координат и углов ориентации относительно начальной матрицы  на участке T1, для расчета смещений нулей инерциальных измерительных приборов после ударных воздействий используют величины lx, ly, lz, рассчитанные по уходам координат и углов ориентации относительно начальной матрицы
на участке T1, для расчета смещений нулей инерциальных измерительных приборов после ударных воздействий используют величины lx, ly, lz, рассчитанные по уходам координат и углов ориентации относительно начальной матрицы  на участке T3, а для расчета смещений нулей инерциальных измерительных приборов во время ударных воздействий используют величины lx, ly, lz, рассчитанные по уходам координат и углов ориентации относительно начальной матрицы , где lx, ly, lz, рассчитывают из соотношений lx=B0xt3+B1xt2, lz=B0zt3+B1zt2, ly=B1yt2, коэффициенты B0x,z, B1x,z, B1y определяют на каждом шаге интегрирования рекуррентной процедурой метода наименьших квадратов, а смещения нулей инерциальных измерительных приборов определяют по соотношениям
на участке T3, а для расчета смещений нулей инерциальных измерительных приборов во время ударных воздействий используют величины lx, ly, lz, рассчитанные по уходам координат и углов ориентации относительно начальной матрицы , где lx, ly, lz, рассчитывают из соотношений lx=B0xt3+B1xt2, lz=B0zt3+B1zt2, ly=B1yt2, коэффициенты B0x,z, B1x,z, B1y определяют на каждом шаге интегрирования рекуррентной процедурой метода наименьших квадратов, а смещения нулей инерциальных измерительных приборов определяют по соотношениям
 ; Δsαx=2·B1x,
; Δsαx=2·B1x,  ; Δsαz=2·B1z, Δsαy=2·By'.
; Δsαz=2·B1z, Δsαy=2·By'.
| СПОСОБ КОМПЛЕКСНЫХ ИСПЫТАНИЙ УНИФИЦИРОВАННЫХ СИСТЕМ ПОЗИЦИОНИРОВАНИЯ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ АКСЕЛЕРОМЕТРОВ И ГИРОСКОПОВ И АВТОМАТИЗИРОВАННЫЙ СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2381511C1 |
| СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНОЙ ГИРОСКОПИЧЕСКОЙ СИСТЕМЫ, ИСПОЛЬЗУЕМОЙ ДЛЯ КОНТРОЛЯ СОСТОЯНИЯ РЕЛЬСОВОЙ КОЛЕИ | 1995 |
|
RU2140059C1 |
| СПОСОБ ИЗМЕРЕНИЯ ЛИНЕЙНОГО УСКОРЕНИЯ | 2008 |
|
RU2366961C1 |
| US 6301965 B1, 16.10.2001 | |||
| КУТУРОВ А.Н | |||
| и др | |||
| Преобразователь ускорений с относительным цифровым кодом | |||
| - Изв | |||
| вузов | |||
| Приборостроение, 2003, т.46, N9, с.34-37 | |||

