1
Изобретение относится к области автоматического управления и может быть использовано для управления пространствен- ным положе;гаем объекта, например летательного аппарата.
Известны системы управления пространственным положением объекта, содержащие jчетыре пары датчиков, оси чувствительное- ти которых в трех парах совпадают соот ветственно с тремя осями инерпии объекта управления, и. логическое устройство со вхо памв которого соединены выходы соответст вукнш€х датчиков.
Для повышения надежности широко при- , меняется резервирование как каналов упра& : ления в целом, так и входящих в них датчнков. Обычно в систему включаются три идентичных канала управления. Неисправ1ШГЙ Канал определяется логическим устройством путем сравнения сигнала на выходе каждого канала с выходными сигналами двух каналов.
Однако, если входяшяй в систекгу управления блок датчиков резервирован по такому же Методу, т.е. параметр лзижения от |
носительно каждой из инерциальных осей объекта управления измеряется тремя датчиками с последующим сравнением их сиг налов, те в некоторых случаях належностг такого блока датчиков оказывается недоотаточной, так как при этом допускается отказ не более одного из трех дублирующих друг друга датчиков.
Цель изобретения - повысить i; ъ.гж кость системы управлений.
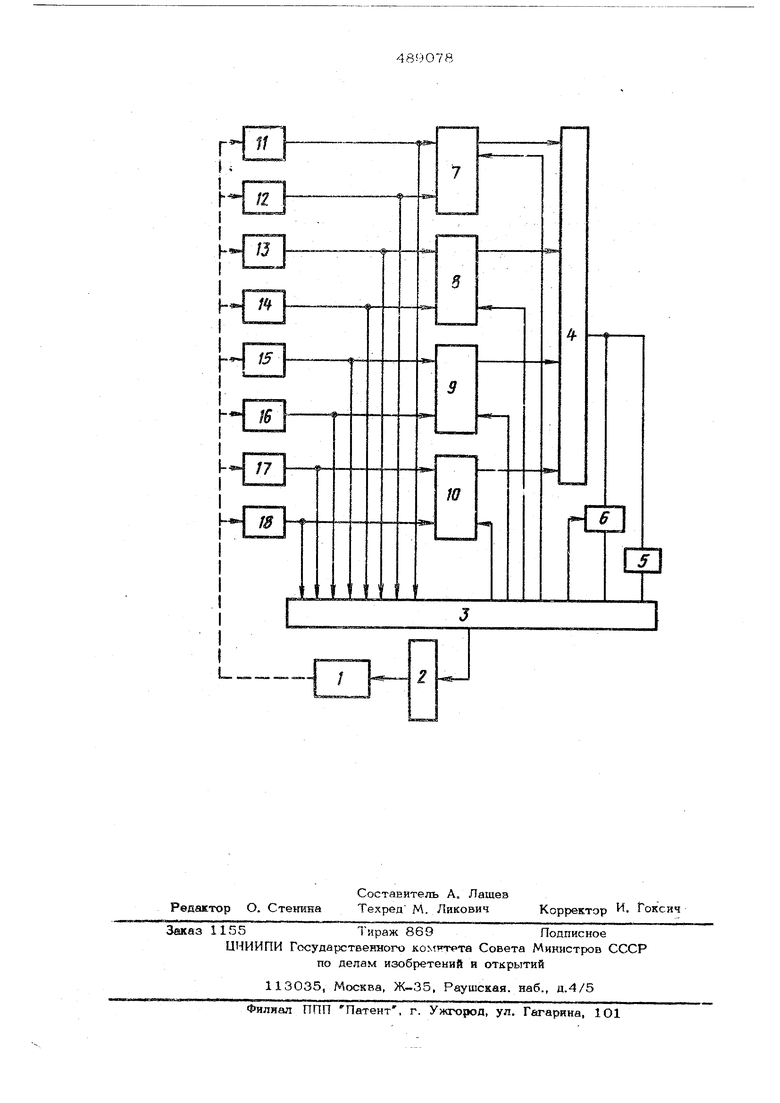
Это достигается тем, что система содержит четыре коммутатора, два входа каждого из которых связаны с выsoдa fи датчиков соответствующей пары, третьи входъ соединены с соответствующими выходами логического устройства, сумглируюшее устройство, s соответствующим входам которого подключены выходы всех коммутаторов, соединен со входом логического устройства через пороговый элемент и через ключ, управляюишй вход которого связан с соответствующим выходом 1Логического устройства, а датчики четвертой пары установлены так, что их чув- ствитолыюсти составляют одинаковые углы с каждой осью инерции объекта. Но чертеже прег.ставлена блок-схема системы управления. Она содержит объект управления 1, блок выработки команд 2, логическое устройств, по 3, суммируюшее устройство 4, пороговый элемент 5, ключ 6, коммутаторы 7 10, датчики 11-18. Система управления работает следуюшим образом. Датчики 11 и 12 измеряют параметр движения объекта относительно его инерциальной оси X . датчики 13 и 14 относительно оси У , датчики 15 и 16 относителыю оси 2 датчики 17 и 18 - относительно оси Д , составляющей с осями Х У и Z одинаковый угол ( {оси X Y 2 ортогональны). Сигнал со всех датчиков поступает в логическое устройстRO 3, где показания датчиков, измеряющих параметр движения относительно одной и той же оси, сравниваются между собой. Ког да сигналы дублирующих друг друга датчй ков, измеряющих движение относительно осей X , У и Z , совпадают между собой, логическое устройство выдает в блок выработай команд сигналы с одного из них (для определенности - с датчиков 11, 13 и 15) По этим сигналам блок выработки команд 2 выдает команды, управляющие движением объекта управления 1. В начальный момент работы системы уп равления коммутаторы 7-9 находятся в таком состояши, что на вычитающие аходы)(, суммирующего устройства 4 проходят сигна лы с датчиков 11, 13 и 15, а сигнал с да чика 17 через коммутатор 1О попадает на суммирующий вход суммирующего устройст ва 4, Сигнал 1/2 на выходе суммирующего устройства 4 равен,. U -Vx-Uy-lk где Vф - сигнал с датчика, измеряющего параметр движения относительно оси А; I/jf, Уу Utk -сигналы с 1атчнков измеряющих параметр движения относительно осей Jt У и as соответственно; ТИ- - коэффициент пропорциональност он постоянен и равен С05 О (ОС - угол, который ось А составляет с осями X, У и 2 ). В случае, если показания всех датчиков правильны, всегда должно выполняться сл&дуюшее соотношение: ( Uxcosd UyHQStL l&coi;X, . по этом в том только случае, когда показания всех датчиков правильны. пороговый элемент 5 находится в исходном состоянии, а ключ 6 закрыт. В случае, если произощел отказ одного из датчиков, например, датчика, измеряющего параметр движения объекта относительно оси.Х , показания датчиков 11 и 12 не совпадают между собой. Если отказ произощел в датчике 13, то величина и не равна О, срабатывает noport вый элемент 5 и выдает сигнал об этом в логическое устройство 3. В этом случае оно выдает сигнал в коммутатор 7 иа переключение на вход суммирующего устройства сигнала с датчика 12, одповременно в блок выработки команд 2 также выдается сигнал с этого датчика, а не с датчика 1 i. Факт отказа дптчика 11 запоминается логическим устройством 3. Если же отказал дат чик 12, то величина U остается равной О и в логическом устройстве только запомина ется факт отказа 12. Аналогичные действия происходят при отка-. зах датчиков, измеряющих параметр движ&ния относительно других осей. В случае, если происходит отказ второго датчика, измеряющего движение относительно одной из осей объекта (например, после отказа датчика 11 отказывает и датчик 12), величина If становится неравной О, срабатывает пороговый элемент 5 и выдает об этом в логическое устройство 3. При этом там уже имеется информация об отказе датчика 11, поэтому (если совпадают между собой сигналы дублирующих друг друга датчиков в других осях) логическое устройство определяет, что отказали оба датчика, измеряющие парам- тр движения объекта относительно оси X. В этом случае оно выдает в коммутатор 7 команду на oivключение выходов обоих датчиков 11 и 12 .от входа суммирующего устройства 4. Сип.нал на его выходе в этом случае будет ра (J -lTy-Uz. Поскольку показания датчиков f/A, Uyt Ua верны, то , т.е. Ух, соответствует параметру движения относительно оси X. Логическое устройство 3 одновременно с командой на отключение датчиков 11 и 12 открывает ключ 6 и сигнал Ux. с выхода суммирующего устройства 4 через ключ 6 поступает в логическое устройство 3, которое подключает его ко входу блока вырабо-пки команд 2 вместо сигнала с датчиков, иэ меряющих параметр движенияобъекта отлог-ительно оси X. Таким образом, в системе управления, содержащей 8 датчиков .параметра движения
обеспечивается нормальное ее фун;;циояиро 1пние при отказе по меньшей море лктбых двух датчиков.
Предмет иэобретепия
Система управления пространственным положением объекта, содержащая четыре пары датчиков и логическое устройство, со вхипа.и соединены выходы соот ветствующих датчиков, отличаюш я с я тем, что, с целью повышения надежности . систем /, он.ч сопгржит n)fx ГОИЫЙ ЭЛКМГ иг, Т ./1К1Ч П ,tfU KONtMyTflT pfl, два f XCjna ч ЖПОГО НЛ ГВЯ.-ЛППЫ
с выходами датчикоп-еоогветствук - f ir-vры, третьи входы coenHiieWii с гоТГРТ( г-.ВуЮЩЯМИ ВЫЧОПОМИ логического yCTpriftCTI.T,
суммирукинее устройство, к cooTBeTcrpyKv щим входам которого поЛслючены вр.1ход.г коммутаторов, выход соединен со вхплом логического )йства через порогой й элемент и через ключ, управляющий вход которого связан с соответствующим выходом логического устг йстьа.
S
4

| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО РЕЗЕРВИРОВАНИЯ ДАТЧИКОВ В СИСТЕМЕ УПРАВЛЕНИЯ ПРОСТРАНСТВЕННЫМ ПОЛОЖЕНИЕМ ОБЪЕКТА | 1986 |
|
SU1394985A1 |
| Устройство для управления пространственным положением объекта | 1976 |
|
SU613291A1 |
| Копировальное следящее устройство для управления станком | 1982 |
|
SU1104470A1 |
| СИСТЕМА УПРАВЛЕНИЯ БЕСПИЛОТНЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ С КОМПЛЕКСНЫМ НАВИГАЦИОННЫМ УСТРОЙСТВОМ | 1994 |
|
RU2046736C1 |
| Устройство контроля датчиков | 1983 |
|
SU1087963A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ АППАРАТОМ | 2011 |
|
RU2465168C1 |
| Система регулирования | 1981 |
|
SU954933A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2008 |
|
RU2365775C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ПАРАМЕТРОВ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2002 |
|
RU2221929C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ОСЕВОГО ПЕРЕМЕЩЕНИЯ ВАЛА | 1996 |
|
RU2129212C1 |
Ю
L.
