Предлагаемое изобретение относится к летательным аппаратам и может быть использовано как транспортное средство с вертикальным взлетом и посадкой.
Известны летательные аппараты [1, 2], у которых несущие элементы (лопасти, крылья) вращаются в вертикальной плоскости на горизонтальном валу.
Например, аппарат [1] содержит эксцентриковый механизм управления положением лопастей. Лопасти имеют сложную конфигурацию.
Летательный аппарат [2] снабжен эксцентриковым механизмом, в котором ось с пазами смещается относительно роторного вала при вращении винтов.
Наиболее близким предлагаемому ротороплану является роторное судно с гребными колесами (роторолет) [3], так как основные несущие элементы роторов (лопасти) имеют подобные профили в поперечном сечении.
Однако подобие симметричных профилей при значительных расхождениях геометрических размеров не обеспечивает равнозначности их качеств при одних и тех же углах атаки.
Профиль лопасти, симметричный в поперечном сечении относительно хорды b, принято считать “тонким профилем”, если он обеспечивает аэродинамические характеристики при изменении угла атаки в интервале ±α, когда каждая сторона лопасти периодически подвергается и положительному, и отрицательному давлению от встречного потока.
Качествам “тонкого профиля” отвечает профиль, имеющий действительно малую толщину и малый размер хорды b.
При увеличенных размерах толщины и хорды, что легко наблюдается при рассмотрении изображения летательного аппарата [3], выполненного в определенном масштабе, ожидаемые аэродинамические характеристики лопасти не могут быть обеспечены (расчетная подъемная сила, малое лобовое сопротивление, отсутствие срывов потока). Увеличенное сечение профиля ведет к увеличению массы лопасти, инерционных сил и нагрузок.
Использование компьютера, управляющего силовыми элементами (актуаторами) установки углов атаки каждой лопасти, снижает надежность и безопасность при эксплуатации аппарата.
Техническим эффектом предлагаемого изобретения являются:
- обеспечение аэродинамических характеристик крыла при увеличении его общей ширины (хорды);
- получение дополнительной подъемной силы, уравновешивающей реактивный крутящий момент;
- применение механизма изменения углов атаки крыла повышенной надежности и механизма переноса весовой нагрузки с концевой части вала ротора на фюзеляж.
Технический эффект достигается следующим образом:
- необходимые аэродинамические характеристики крыла при увеличении его общей ширины (хорды) обеспечиваются изготовлением крыла составным из целого ряда отдельных лопастей с тонким профилем, симметричным относительно хорды b, с воздушными промежутками между ними;
- дополнительная подъемная сила Y3 возникает при установке за ротором параллельно его оси щита-крыла, отражающего часть воздушного потока, имеющего окружную скорость за ротором;
- механизм изменения угла атаки α крыльев (лопастей) содержит втулку, размещенную на конце вала ротора, на наружной цилиндрической поверхности которой установлены кольца, соединенные тягами с крыльями;
- часть втулки в форме прямой четырехгранной призмы с квадратным основанием находится в окнах вертикального и горизонтального ползунов, перемещаемых вместе со втулкой относительно оси вала ротора;
- концевая часть вала ротора освобождается от весовой нагрузки установкой кольца, жестко соединенного опорами со стойками на трубчатой части вала ротора и входящего цилиндрической поверхностью в канавки роликов с осями, укрепленными на фюзеляже.
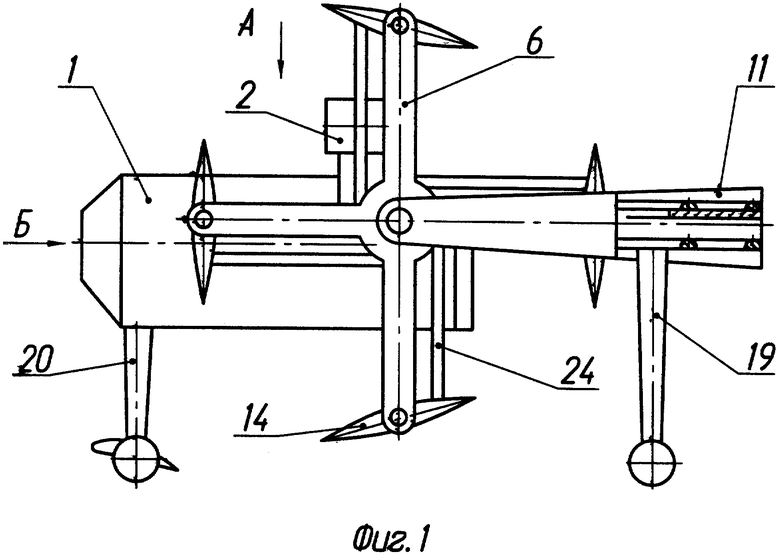
На фиг.1 - вид В на фиг.2 с местным разрезом Г-Г;
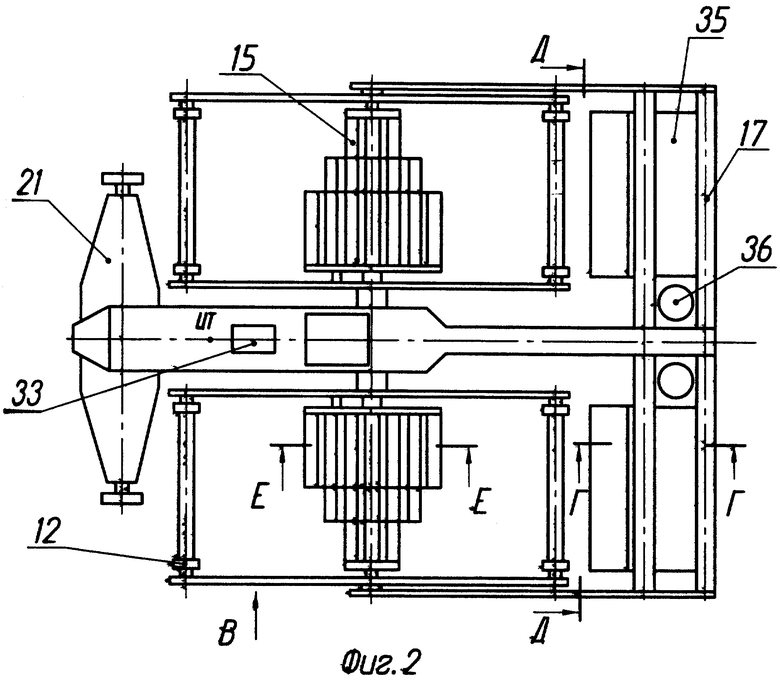
На фиг.2 - вид А на фиг.1;
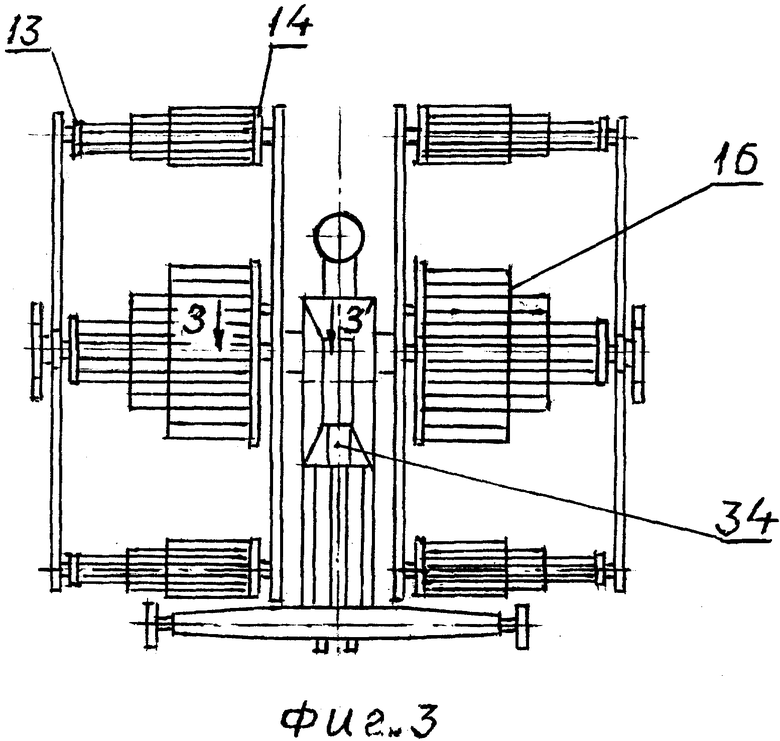
На фиг.3 - вид Б на фиг.1;
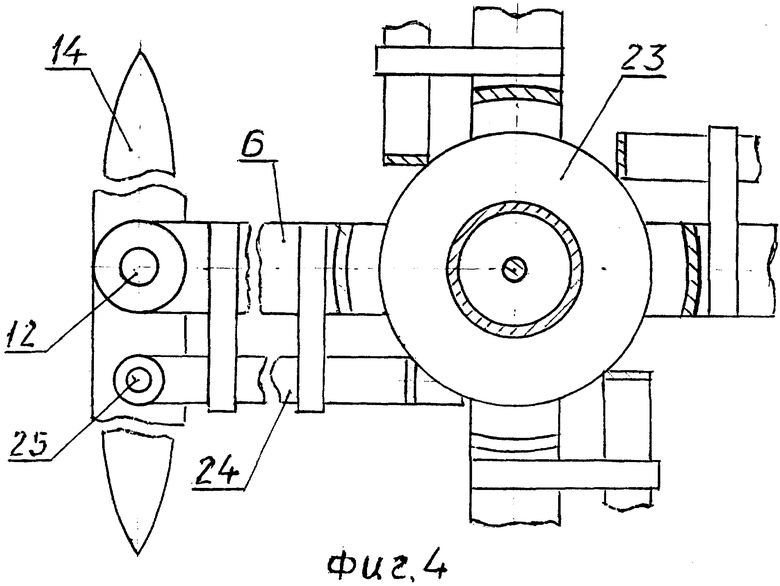
На фиг.4 - разрез Ж-Ж на фиг.5;
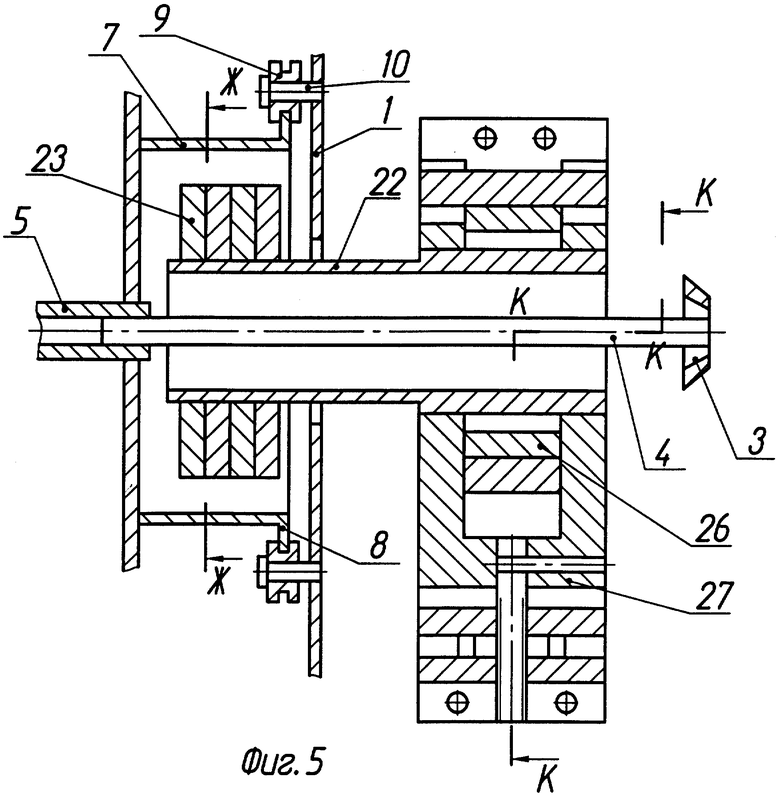
На фиг.5 - местный разрез 3-3 на фиг.3;
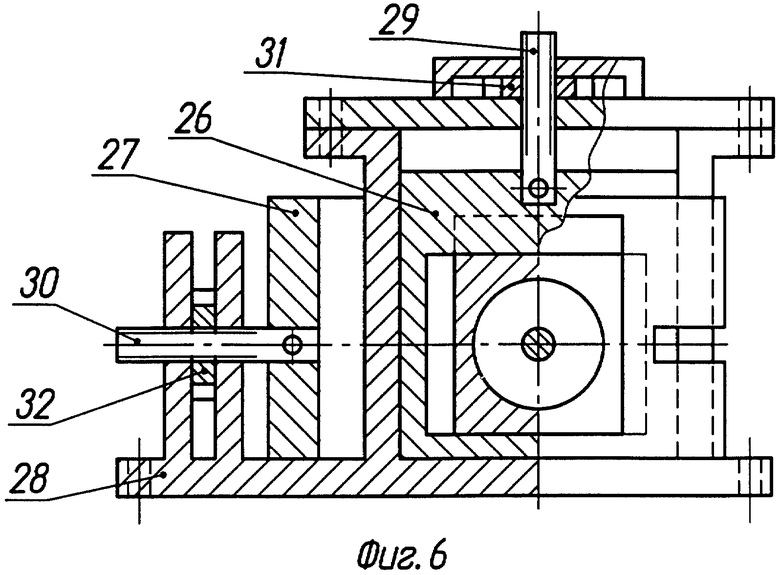
На фиг.6 - разрез К-К-К-К на фиг.5;
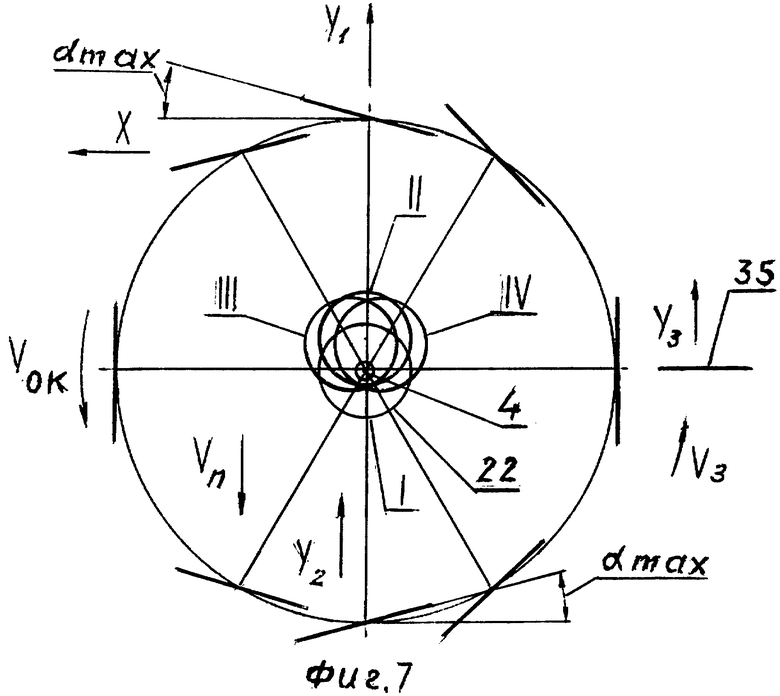
На фиг.7 - схематическое изображение ротора в поперечном сечении: углы атаки, векторы сил и скоростей;
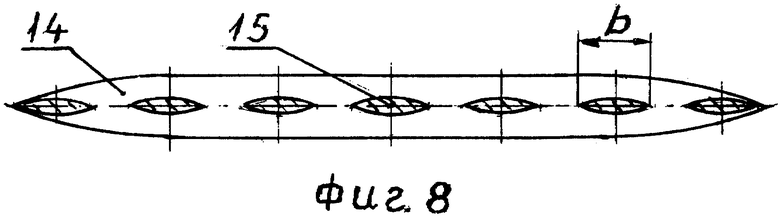
На фиг.8 - разрез Е-Е на фиг.2;
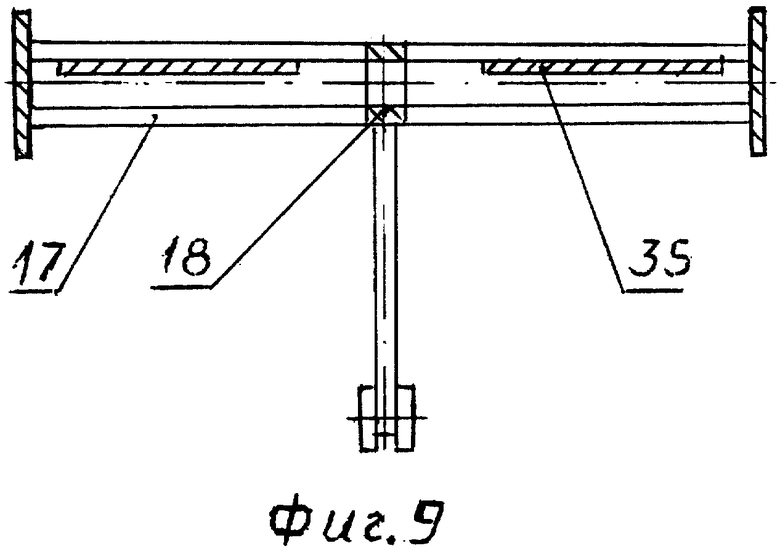
На.фиг.9 - разрез Д-Д на фиг.2;
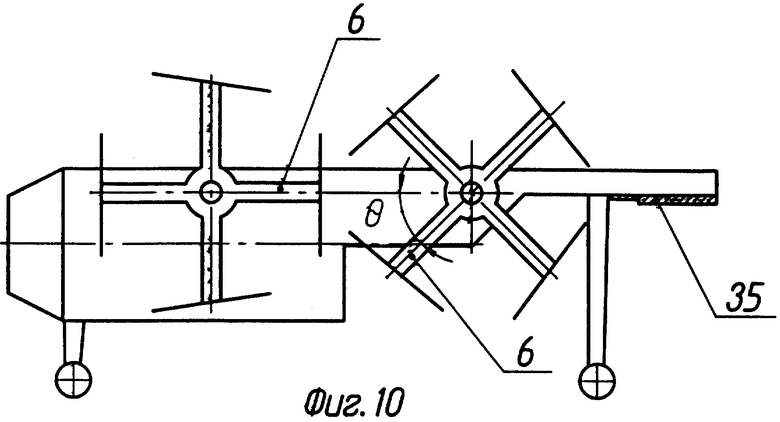
На фиг.10 - четырехроторный аппарат, вид сбоку.
Ротороплан представляет собой летательный аппарат, суммарная подъемная сила в котором создается различными его элементами:
роторы обеспечивают вертикальный подъем, поворот вокруг вертикальной оси, горизонтальное движение;
каждый щит-крыло в хвостовой части постоянно находится под действием вихреобразного потока и создает часть суммарной подъемной силы;
крыло-балка под носовой частью является основной несущей опорой при контакте шасси с грунтом, а при горизонтальном движении на крыле появляется дополнительная составляющая подъемной силы.
На верхней поверхности фюзеляжа 1 установлен двигатель 2, соединенный трансмиссией с шестерней 3 на концевой части 4 вала ротора. К трубчатой части 5 вала ротора жестко присоединены стойки 6, на которых укреплены опоры 7 кольца 8, входящего в канавки роликов 9 с осями 10, соединенными со стенкой фюзеляжа. Наружный конец трубчатого вала 5 установлен в отверстии стабилизатора 11. Между стойками размещены крылья на полуосях 12, входящих в отверстия стоек.
Каждое крыло состоит из семи лопастей. Наружные нервюры 13 и 14 жестко соединяют три центральные лопасти 15; две соседние лопасти меньшей длины; следующие лопасти (наружные) еще меньшей длины.
Четыре укороченные лопасти одним концом укреплены на удлиненной нервюре 14, а их вторые концы соединены с центральными лопастями нервюрами 16.
Каркас 17 связывает хвостовую балку 18 с пластинчатым стабилизатором 11. Балка 18 опирается на стойку 19 заднего шасси. Стойки 20 переднего шасси опираются на крыло-балку 21 как на опору.
К механизму изменения угла атаки крыла относятся: втулка 22; каждое из колец 23 на цилиндрической части втулки соединено тягой 24 с шипом 25 на нервюре 14 соответствующего крыла, часть втулки в форме прямой четырехгранной призмы с квадратным основанием расположена в окнах вертикального 26 и горизонтального 27 ползунов, соединенных корпусом 28.
Перемещение ползунов осуществляется винтами 29 и 30 при вращении шестерен 31 и 32, имеющих резьбу в отверстии ступицы. Отсек 33 в фюзеляже предназначен для укладки стабилизирующего парашюта.
В носовой части - входной люк 34.
На каркасе 17 за каждым ротором установлен щит-крыло 35.
Винты с вертикальной силой тяги размещены в хвостовой части в пространстве между деталями каркаса, щитом-крылом и хвостовой балкой.
Взаимодействие элементов и деталей узлов ротороплана в режиме работы.
Двигатель 2 через трансмиссию вращает шестерню 3 и вал ротора, состоящий из частей 4 и 5; вместе с валом вращаются стойки 6 с установленными между ними на полуосях 12 крыльями. Если оси втулки 22 и вала 4, 5 ротора совмещены (поз.I втулки 22, фиг.7), то угол атаки всех крыльев при вращении ротора независимо от их положения равен нулю (α=0).
При вращении шестерни 31 винт 29 перемещает вертикальный ползун 26 и втулку 22 вместе с кольцами 23 вверх (поз.II, фиг.7), при этом изменится и положение концов тяг 24, соединенных с шипами 25 на нервюрах 14.
При таком расположении втулки 22 угол атаки верхнего крыла на вертикальном диаметре примет максимальной значение (αmах), например α=12°. Угол атаки нижнего крыла на этом диаметре численно будет также равен 12°, но с противоположным знаком; поверхности лопастей, находившиеся под избыточным давлением потока в момент прохождения верхней части траектории (полуокружности) при прохождении крылом нижней части траектории, окажутся под действием отрицательного давления.
Величина углов атаки крыльев на горизонтальном диаметре изменяется незначительно; можно принять α=0.
Вектор подъемной силы Y1 при движении крыльев в верхней полуокружности, когда поток воздуха направляется внутрь ротора, и при движении крыльев в нижней полуокружности, где поток движется от ротора (вектор Y2), направлены вертикально вверх.
Соответственно периодическому изменению угла атаки от α=0 до α=mах изменяется и подъемная сила крыла. При смещении двух втулок 22 в поз.III (фиг.7) вращением шестерни 32 и перемещением винтом 30 горизонтального ползуна 27 появляется горизонтальная сила тяги X, вызывающая перемещение ротороплана в горизонтальном направлении вперед.
Если втулки 22 находятся в поз.IV (фиг.7), то горизонтальная сила тяги изменяет направление, и ротороплан движется назад.
Нахождение одной втулки 22 в поз.III, а второй - в поз.IV вызовет вращение ротороплана вокруг вертикальной оси. На отражательный щит-крыло 35 постоянно оказывает давление часть вращающегося воздушного потока, что приводит к возникновению дополнительной подъемной силы Y3.
Участок щита-крыла 35, обращенный к ротору, предпочтительно выполнять из деформируемого материала, что предотвратит разрушение лопасти крыла при попадании посторонних тел в воздушный зазор между ротором и щитом-крылом.
При вращении ротора общая величина подъемной силы Y периодически изменяется - пульсирует, что может быть уменьшено увеличением числа крыльев.
В случае остановки двигателя для стабилизации положения ротороплана выбрасывается парашют.
Реактивный крутящий момент вызывает поворот фюзеляжа и хвостовой балки вокруг оси вращающихся роторов. Частично этот момент уравновешивается дополнительной подъемной силой Y3, действующей на щит-крыло.
Оставшаяся часть реактивного момента уравновешивается массой фюзеляжа, центр тяжести ЦТ которого смещается относительно оси роторов вперед.
При определении подъемной силы в расчет вводится действительная площадь крыла, т.е. сумма площадей лопастей крыла: S=b·l, кв. м, где
b - хорда лопасти;
l - общая длина всех лопастей.
Уменьшение диаметра роторов с сохранением грузоподъемности может быть компенсировано увеличением числа роторов, например, до 4-х (фиг.10, вид сбоку). При этом для снижения амплитуды колебаний подъемной силы необходимо взаимное смещение углов поворота стоек 6 (крыльев) роторов (угол θ).
При необходимости корректировки момента, создаваемого подъемной силой Y3 и смещением центра тяжести ЦТ, уравновешивающими реактивный момент, используются воздушные винты с вертикальной силой тяги.
Изобретение относится к летательным аппаратам с вертикальным взлетом и посадкой. Ротороплан имеет фюзеляж, расположенный между двумя роторами с крыльями, продольные оси которых расположены в горизонтальных плоскостях, механизм изменения угла атаки крыльев и двигатель. Каждое крыло составлено из отдельных лопастей с тонким профилем, симметричным относительно хорды, установленных с промежутками и соединенных в единое крыло нервюрами, на которых установлены полуоси, входящие в отверстия стоек, жестко соединенных с валом ротора. За каждым ротором параллельно оси его вала на каркасе, укрепленном на хвостовой балке, установлен отражательный щит-крыло, обращенный к ротору участок которого изготовлен из деформируемого материала. Механизм изменения угла атаки крыла имеет втулку, на цилиндрической поверхности свободного конца которой установлены кольца, соединенные тягой с шипом на нервюре каждого крыла. Другая часть втулки находится в окнах вертикального и горизонтального ползунов, перемещаемых совместно с втулкой винтами с приводом относительно оси вала ротора, проходящего внутри этой втулки. На концевую часть вала ротора для устранения действия весовой нагрузки на него установлено кольцо, жестко соединенное опорами со стойкой на трубчатой части вала ротора и входящее цилиндрической поверхностью в канавки роликов с осями, укрепленными на фюзеляже. Изобретение позволяет улучшить аэродинамические качества крыла, получить дополнительную подъемную силу, повысить надежность механизма изменения угла атаки крыла и механизма переноса весовой нагрузки с концевой части ротора на фюзеляж. 2 з.п. ф-лы, 10 ил.
| US 5265827 А, 30.11.1993 | |||
| ВЗРЫВОЗАЩИЩЕННЫЙ БАРАБАН ДЛЯ НАМОТКИ КАБЕЛЯ | 2010 |
|
RU2507657C2 |
| Упругая подвеска | 1990 |
|
SU1754977A2 |
| RU 94015049 A1, 10.07.1996 | |||
| САМОЛЕТ С ВЫДВИЖНЫМИ ЦИКЛОИДНЫМИ ДВИЖИТЕЛЯМИ | 1994 |
|
RU2090453C1 |

