Изобретение относится к летательным аппаратам тяжелее воздуха с машущим крылом. Аппарат может быть использован для более полного изучения закономерностей машущего полета птиц и, тем самым, приближения момента создания большого летательного аппарата с человеком на борту.
Как известно, главные отправные данные для создания большого машущекрылого аппарата были изложены еще в классических трудах по махолетам (см., например, [1] или [2]).
Например, автору [2], стр.86, так представляется махолет будущего:
«это машина высоких аэродинамических качеств, обладающая хорошо обтекаемым корпусом, в передней части которого помещается летчик с прекрасным обзором вперед и в стороны. К корпусу прикреплены крылья, эластичные по крайней мере хотя бы в некоторой своей части. Прикрепление к корпусу сделано так, что во время махания не образуется ни щелей, ни резких переходов. Двигатель помещается в середине корпуса, сзади летчика. Хвостовое оперение в первых машинах может состоять из горизонтального и вертикального, далее же с развитием техники, по всей вероятности, последнее станет ненужным. Такова в общих чертах эта будущая машина, но действительность может превзойти любую фантазию».
Разберем более подробно алгоритм полета птицы, чтобы понять, что именно должен копировать человек в этом алгоритме, работа которого подтверждена миллионами лет полетов птиц.
Во время полета в фазе маха вниз птица имеет крыло под положительным углом атаки (угол между хордой крыла и касательной к траектории). При этом, как известно, на крыле развивается сила тяги, направленная вперед, и подъемная сила, направленная вверх. При махе вверх, под действием аэродинамических сил, приложенных к крылу, некоторая часть его устанавливается под отрицательным углом атаки. Тогда возникает дополнительная сила тяги, хотя подъемная сила (меньшая, чем в первой фазе маха) направлена вниз. Это вызывает некоторую волнообразность траектории тела птицы (см. [2], стр.42). В свое время еще Лилиенталь [1] разделил функции по длине крыла птицы, дав корневой его части функцию преимущественно поддержания в воздухе, а периферийной - функцию преимущественно создания тяги (см. [2], стр.43). Волнообразность полета птицы не только описана во многих, даже классических источниках, ее наблюдали и авторы данного изобретения, при изучении машущего полета. При этом мышцы птицы устроены так, что она может только поднимать и опускать крылья, но занос крыльев вперед и относ назад относительно корпуса птицы (в результате концы крыльев описывают эллипсы в воздухе) - это есть прямой результат действия на крыло аэродинамических сил, без участия самой птицы (там же, стр.49). Этот эллипс описал еще Марей в [3]. Поэтому в орнитоптере нужен механизм для принудительного изменения угла атаки, но поддерживать его постоянным по всей длине крыла - нет необходимости.
Однако, в течение последних 50 лет, несмотря на создание многих летающих моделей с машущим крылом, представление об аппарате будущего менялось и все более отходило от сложившихся ранее воззрений в каждом новом запатентованном предложении.
Например, известен летательный аппарат с машущим крылом (орнитоптер), содержащий корпус с крыльями и приводом в виде двигателя с коленчатым валом. В данном устройстве крыло выполнено жестким и, при работе двигателя, одновременно с маханием крыльев относительно оси летательного аппарата, осуществляет принудительный поворот («крутку») крыла относительно его продольной оси по всей длине последней (АС СССР №487808, опубл. 1975). Недостатком устройства является низкая эффективность крыла из-за противоречия его алгоритма работы - алгоритму полета птицы, у которой крутка крыла и изменение, тем самым, угла атаки при каждом махе осуществляется в каждом сечении крыла на разную величину, обеспечивая в периферийной области крыла положительную подъемную силу и тягу как при махе вниз, так и при махе вверх.
Известен также махолет, имеющий фюзеляж, V-образное хвостовое оперение с аэродинамическими рулями и шасси. Аппарат снабжен двумя парами крыльев, расположенными друг за другом. Оба парных крыла крепятся к фюзеляжу и могут совершать вокруг шарниров машущие движения (патент США №2407777, кл.244-16, опубл. 1946). Однако в данном аппарате имеет место тот недостаток, что не предусмотрено управление углом атаки крыльев и управление креном аппарата. Тем самым летательный аппарат имеет низкую эффективность по сравнению с птичьим крылом.
Известен летательный аппарат в виде мускулолета, крыло которого состоит из 2-х частей - внешней и внутренней, связанных между собой шарниром. Пилот, лежа в фюзеляже на груди, руками совершает машущие движения крыльями. Крыло не обеспечивает изменения угла атаки в процессе полета, а вместо этого пилот отклоняет закрылки, что приводит к увеличению лобового сопротивления и энергозатрат, резко уменьшая эффективность аппарата (патент Германии №3320985 С2, МПК В64С 31/04, опубл. 1985).
Известен также махолет, содержащий каркас, шасси и силовую установку с 2-мя передними и 2-мя задними коленчатыми валами и передним и задним жесткими машущими крыльями, которые не только осуществляют перемещение в воздухе, но и, с помощью рычажной системы, меняют по заданному (геометрией аппарата) закону угол атаки в процессе маха, причем сначала у переднего крыла он уменьшается от нулевого до заданного отрицательного, а у заднего крыла он увеличивается от нулевого до заданного положительного. В дальнейшем все повторяется в обратной последовательности (патент РФ №2063367, опубл. 1996). Недостатком этого решения является его низкая эффективность из-за того же противоречия алгоритму работы птичьего крыла. Автор пытается заменить сложный закон осевой крутки крыла простым законом постоянной крутки вдоль всей кромки крыла. Это является таким же упрощением, как и при замене махолета - самолетом, в котором подъемная сила создается неподвижным крылом, а тяга - пропеллером.
Известен также летательный аппарат с машущим крылом, содержащий фюзеляж, крылья и хвостовое оперение, в котором система крыла прикреплена к фюзеляжу посредством узла подвески с рычажно-педальным приводом, само крыло выполнено с аэродинамической круткой профиля и состоит из трех частей - средней и двух концевых частей, корневые хорды которых соединены с корневыми хордами средней части с помощью шарниров, оси которых ориентированы параллельно хорде крыла, при этом средняя часть системы крыла имеет балансировочную поверхность, а концевые части снабжены механической системой синхронизации их возвратно-поступательного (машущего) движения в вертикальной плоскости и элеронами и подпружинены к средней части посредством механизма с изменяющейся жесткостью. По замыслу автора пилот, сидя в кресле, сгибает ноги и поворачивает рычаги, которые воздействуют на несколько карданных устройств и поршни силовых цилиндров, заставляет аппарат совершать разбег по земле, подъем в воздух и дальнейший горизонтальный полет (патент РФ №2217355, опубликованный 27.11.2003 г.). При этом изменение угла атаки осуществляется принудительно во всех режимах полета, но является постоянным по величине вдоль крыла, что также приводит к ухудшению эффективности аппарата, удаляя алгоритм его работы от прототипа - птиц.
Известен также летательный аппарат, содержащий фюзеляж, машущие крылья и механизм для приведения их в движение, в котором комли крыльев соединены с кривошипами главного вала, что сообщает крыльям круговое движение одновременно с колебательным, а в целом - движение по эллипсу (Авт. свид. СССР №136628, кл. В64С 33/02, опубл. 1961). Аппарат страдает тем же недостатком: он искусственно делает то, что птице не нужно для полета.
Известен также летательный аппарат с машущими крыльями, в котором приводной вал движения лопастей крыльев выполнен ступенчатым с изогнутыми концами, к которым на подшипниках прикреплены лопасти крыльев, а механизм формирования их траектории выполнен в виде качалки с U-образным карманом на конце и прорезью. Через эту прорезь пропущено колено ступенчатого вала, причем напротив кармана в плоскости движения качалки размещена дугообразная направляющая. Это дает возможность совершать сложное движение крыла более простыми средствами, что, по мнению авторов, повышает эффективность привода и уменьшает ударные нагрузки (Патент РФ №1728086, МПК В64С 33/02, опубл. 1992). В действительности механизм данного аппарата обладает низкой эффективностью из-за сложной формы траектории движения крыла, часть которой оно проходит, находясь ребром к воздушному потоку.
Известен также летательный аппарат, который содержит фюзеляж, двигатель с валом, стабилизатор, киль, два одноколенчатых вала, втулки, кронштейны, шатуны, торсионы, гибкие карданы, штанги, коромысла и редуктор, преобразующие вращение вала двигателя в машущее движение крыльев. При этом угол атаки крыльев (жестких) меняется в зависимости от фазы машущего движения. По мнению авторов, предложение по патенту повышает экономичность полета орнитоптера (Патент РФ №2142388, МПК В64С 33/02, опубл. 1999). Недостатком данного устройства является, как и у предыдущего, низкая эффективность из-за сложности механической системы с принудительной круткой крыла и несоответствия алгоритма работы его - алгоритму полета птицы.
Итак, при создании махолета наша задача - обеспечить ему «мышцы» для маха вниз, по крайней мере в 10-15 раз более мощные, чем для маха вверх ([2], стр.41), и дать ему возможность менять угол атаки гибкого крыла на разную величину по длине крыла, как это делают птицы. Если для этого просто «расслабить» крыло, уничтожив его гибкость, то в нужной фазе маха аппарат не даст подъемной силы. Поэтому определенная гибкость крыла должна быть создана, как это имеет место индивидуально у каждой птицы. После большого количества стендовых экспериментов в предлагаемом изобретении нами была создана такая заданная гибкость за счет конструкции крыла и плоских шарниров, соединяющих нервюры крыла с обтяжкой.
Все приведенные выше доводы относятся к гибкому крылу, которым птица и отличается от многих замыслов летательных аппаратов человека. Поэтому при жесткой конструкции крыла может понадобиться принудительное изменение угла атаки, но нужно помнить, что экспериментально доказанное уже несколькими авторами преимущество в эффективности птичьего крыла, благодаря которому орел может лететь с добычей, превышающей его вес, также имеет место только для гибкого крыла определенной упругости.
Поэтому развивая летательный аппарат с машущим крылом, от уровня модели до аппарата с людьми на борту, - нужно на каждом этапе находить (или создавать!) новые конструкционные материалы, обеспечивающие упругость и гибкость нежестких крыльев. На этом пути и возможно решение человеком загадки машущего крыла.
Поэтому наиболее близким по технической сущности к предложенному устройству (прототипом) является RC-модель Parkhawk фирмы Kinkade, серийно выпускаемая уже несколько лет и продаваемая в магазинах авиамоделей.
Летательный аппарат с машущим крылом содержит фюзеляж с головной и хвостовой частями, крылья с нервюрами и обтяжкой и двигательную установку с коленчатым валом, содержащим 2 шейки, симметрично расположенные относительно продольной оси аппарата. Хвостовая часть содержит горизонтальный стабилизатор, выполненный в виде хвоста птицы, с возможностью поворота вокруг продольной и поперечной осей летательного аппарата. Недостатком известного устройства является крепление тяг с шарнирами электропривода непосредственно к передней кромке машущего крыла, без моделирования крыла, копирующего конструкцию птичьего, с заданной упругостью. Это приводит к пониженной эффективности аппарата.
Предложенное устройство предназначено для повышения энергетической эффективности летательного аппарата с машущим крылом и отличается тем, что каждое из крыльев содержит главную консоль, соответствующую плечевой и локтевой костям крыла птицы, и выполнено состоящим из центропланного, периферийного и промежуточного участков, центропланный и периферийный участки содержат нервюры, причем нервюры центропланного участка соответствуют аэродинамическому профилю крыла и закреплены на главной консоли посредством плоских пружин с возможностью поворота хорды центропланного участка на 10-20 градусов, периферийный участок является продолжением главной консоли и содержит нервюры в виде прямых реек, составляющих углы от 30 до 60 градусов относительно продольной оси аппарата, а промежуточный участок крыла не содержит нервюр, каждая из двух шеек коленчатого вала соединена с главной консолью соответствующего крыла посредством плоского шарнира в точке, отстоящей от центральной продольной оси фюзеляжа на 1/10 длины крыла летательного аппарата, радиус колена коленчатого вала выбран так, чтобы пределы изменения угла атаки центропланного участка крыла при махе как вверх, так и вниз составляли 15-30 градусов, в зависимости от скорости полета, точка соединения штока плоского шарнира с консолью крыла выбрана на вертикальной оси, соединяющей верхнюю и нижнюю мертвые точки коленчатого вала, длина штока шарнира подобрана так, чтобы полный угол маха крыла составлял +\-32 градуса, а центропланные участки крыльев гибко соединены друг с другом в передней и хвостовой частях фюзеляжа.
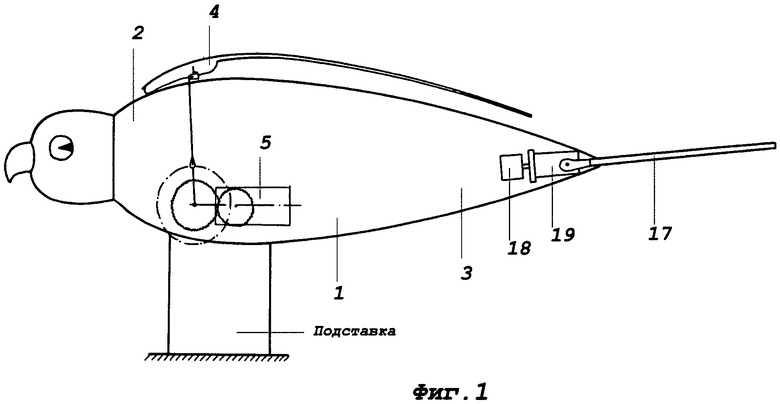
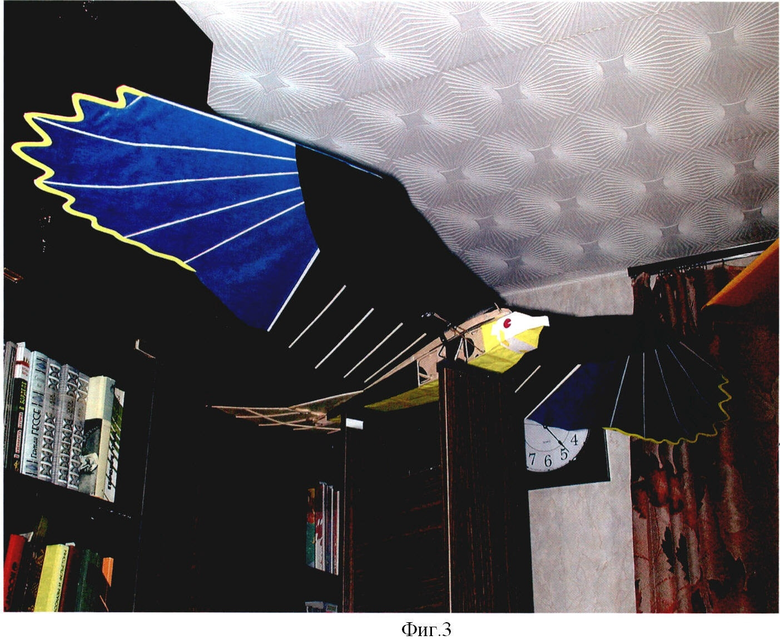
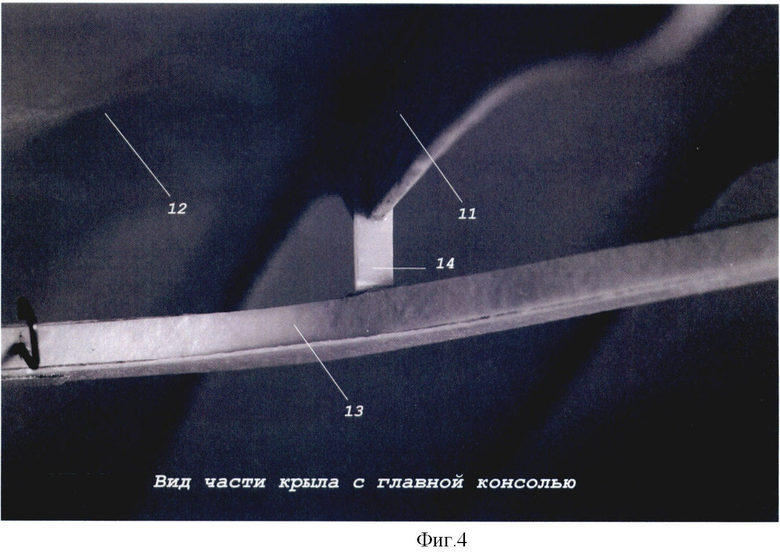
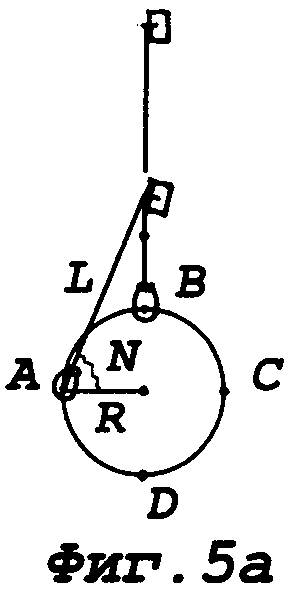
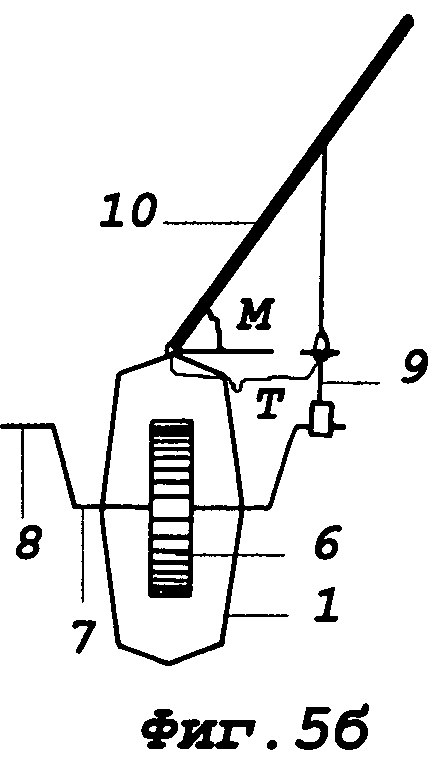
На Фиг.1 показан чертеж вида сбоку действующей модели предложенного летательного аппарата. На фиг.2 изображено одно из машущих крыльев модели (вид снизу), на Фиг.3 показано фото внешнего вида действующей модели в варианте с электроприводом. На фиг.4 показан снимок части крыла действующей модели с нервюрами и плоскими шарнирами, на фиг 5а и 5b показан чертеж кинематики привода крыльев, с помощью которого был выполнен расчет углов атаки и полного угла маха, приближенный к реальной птице.
Летательный аппарат (Фиг.1) состоит из фюзеляжа 1, с головной 2 и хвостовой 3 частями, крыльев 4 с нервюрами 11 и обтяжкой 12 и привода крыльев 5. Для моделирования упругости и гибкости крыла в каждую из нервюр центроплана (см. Фиг.2 и 4) врезаны на клею плоские шарниры 14 в виде пружинных уголков, изготовленные из винипласта толщиной 0.6 мм. Заданная упругость крыла обеспечивается также наклеиванием обтяжки 12 (бумага типа кальки, либо Oracover) непосредственно на торцы нервюр 11, без продольных (вдоль крыла) лонжеронов. Кроме того, условное деление крыла на три части разного назначения и отсутствие конструктивных элементов в средней части крыла - также создают заданную упругость и гибкость крыла. С этой же целью нервюры 15 периферийного участка крыла выполнены в виде прямых реек, составляющих углы от 30 до 60 градусов с продольной осью аппарата (см. Фиг.2). Главная консоль крыла 13 в виде изогнутой рейки проходит через центропланный участок крыла в первой его трети, примыкающей к фюзеляжу, и имитирует кости скелета реальной птицы, находящиеся в крыле последней. Каждая из двух шеек 8 коленчатого вала 7 соединена с главной консолью 13 соответствующего крыла посредством плоского шарнира в точке 16, отстоящей от центральной продольной оси фюзеляжа на 1/10 длины крыла летательного аппарата. Нервюры, задающие аэродинамический профиль крыла, укреплены на главной консоли с помощью плоских шарниров (см. выше), как показано на Фиг.2 и 4. Привод крыльев действующей модели (Фиг.5б) содержит электромотор (не показан), редуктор с ведомой шестерней 6, закрепленной на коленчатом валу 7, проходящем через всю ширину фюзеляжа (см. также Фиг.1 и 3). Вал имеет по одному колену 8 с каждой стороны фюзеляжа, на шейку которого надет плоский шарнир, со штоком 9, подвижно соединенным с главной консолью 13 соответствующего крыла.
Хвостовая часть 3 модели содержит горизонтальный стабилизатор 17, выполненный в виде хвоста птицы, с возможностью поворота вокруг продольной (с помощью рулевой машинки 18) и поперечной (с помощью рулевой машинки 19) осей летательного аппарата.
Предложенный летательный аппарат работает следующим образом.
В исходном положении фюзеляж 1 модели с закрепленными на нем крыльями 4 находится в руке оператора. При этом обе шейки 8 коленчатого вала 7 находятся в горизонтальном верхнем положении. Производят включение электродвигателя модели и запуск модели против ветра, аналогично запуску моделей самолетов. Начинаются махи крыльями, причем в нижнем и верхнем положениях (В и D на Фиг.5а) опорных шеек 8 коленчатого вала шток шарнира находится в вертикальном положении, поэтому угол атаки равен нулю. Сами крылья в эти моменты находятся, соответственно, в верхнем и нижнем положениях, причем угол маха М составляет в верхнем положении крыла М=arcsin(42/75)=+34 градуса, а в нижнем положении М=-34 градуса (для случая, когда радиус колена вала в модели выбран R=42 мм, длина штока L=68 мм, а расстояние вдоль крыла от точки его закрепления на фюзеляже до точки соединения со штоком Т=75 мм, что составляет 1/10 длины крыла). При необходимости установить небольшой начальный угол атаки весь коленчатый вал с укрепленной на нем ведомой шестерней редуктора привода (Фиг.5б) просто смещают слегка вперед (внутри фюзеляжа), так что в верхнем положении колена шток устанавливается слегка наклонно по отношению к оси, соединяющей верхнюю и нижнюю мертвые точки коленчатого вала. При исходном положении вала (до смещения вперед) угол атаки N центропланной части крыла меняется от N=arcsin (R/L)=arcsin (42/68)=37 градусов в положении А колена вала (мах вниз) до -37 градусов в положении С (мах вверх). В процессе движения крыла вниз угол атаки постепенно увеличивается, достигая максимума в среднем положении шейки коленчатого вала (положении А на Фиг.5а). На периферийных участках крыла благодаря его гибкости изменение угла атаки будет, как и у птицы, меньше. Благодаря такому выбору кинематических характеристик и заданной, подобранной экспериментально гибкости крыльев, данная модель, иллюстрирующая предложенный летательный аппарат, даже на стенде демонстрировала взмахи крыльями, близко имитирующие полет реальной птицы (см. соответствующий видеоклип).
Литература
1. Отто Лилиенталь «Полет птиц как основа искусства летать» пер. с нем. Е.С.Федорова. СПб., 154 стр., 1905 г.
2. М.К.Тихонравов. «Полет птиц и машин с машущими крыльями» Москва, 129 стр., 1937 г.
3. Марей. «Механика животного организма. Передвижение по земле и по воздуху». Перевод с франц. Изд. Ред журнала «Знание». СПб., 1875 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |
| БИОАЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 2009 |
|
RU2392189C1 |
| УПРУГО ИЗГИБАЮЩЕЕСЯ КРЫЛО МАХОЛЕТА И МАХОЛЕТ | 2015 |
|
RU2615030C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 2018 |
|
RU2692028C1 |
| Махолет | 2017 |
|
RU2655582C1 |
| ЭКРАНОПЛАН - "БЕСХВОСТКА" | 2022 |
|
RU2776632C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2493050C2 |
| МАХОЛЕТ | 2011 |
|
RU2467923C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| МАХОЛЕТ | 1993 |
|
RU2063367C1 |
Изобретение относится к области авиации, более конкретно к летательному аппарату с машущим крылом. Летательный аппарат содержит фюзеляж с головной и хвостовой частями, крылья с нервюрами и обтяжкой и двигательную установку с коленчатым валом, содержащим две симметричные шейки. Хвостовая часть фюзеляжа содержит горизонтальный стабилизатор, выполненный в виде хвоста птицы, с возможностью поворота вокруг продольной и поперечной осей летательного аппарата. Каждое крыло содержит главную консоль, соответствующую плечевой и локтевой костям крыла птицы, и выполнено состоящим из центропланного, периферийного и промежуточного участков. Центропланный и периферийный участки содержат нервюры, причем нервюры центропланного участка соответствуют аэродинамическому профилю крыла и закреплены на главной консоли посредством плоских пружин с возможностью поворота хорды центропланного участка на 10-20 градусов. Периферийный участок является продолжением главной консоли и содержит нервюры в виде прямых реек, составляющих углы от 30 до 60 градусов относительно продольной оси аппарата. Каждая из двух шеек коленчатого вала соединена с главной консолью соответствующего крыла посредством плоского шарнира в точке, отстоящей от продольной оси фюзеляжа на 1/10 длины крыла летательного аппарата. Радиус колена коленчатого вала выбран так, чтобы пределы изменения угла атаки центропланного участка крыла при махе как вверх, так и вниз составляли 15-30 градусов, в зависимости от скорости полета. Точка соединения штока плоского шарнира с консолью крыла выбрана на вертикальной оси, соединяющей верхнюю и нижнюю мертвые точки коленчатого вала, длина штока шарнира подобрана так, чтобы полный угол маха крыла составлял +/-32 градуса, а центропланные участки крыльев гибко соединены друг с другом в головной и хвостовой частях фюзеляжа. Технический результат заключается в увеличении гибкости крыла летательного аппарата. 6 ил.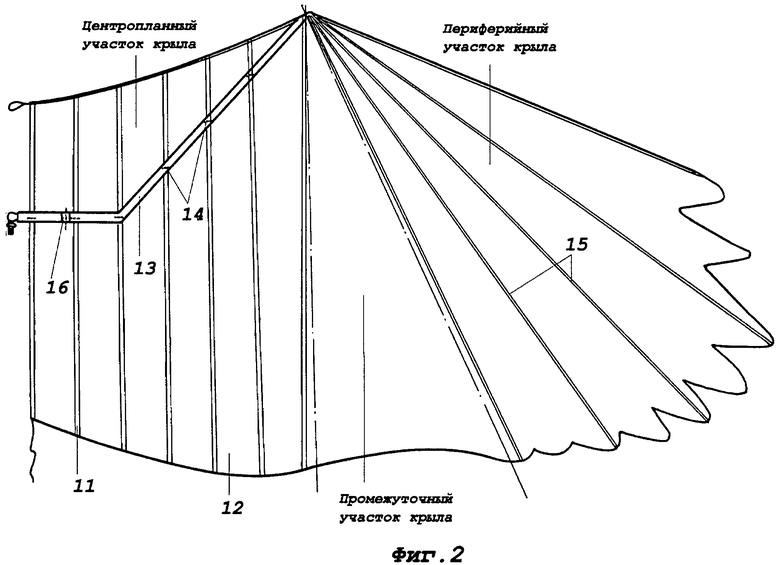
Летательный аппарат с машущим крылом, содержащий фюзеляж с головной и хвостовой частью, крылья с нервюрами и обтяжкой и двигательную установку с коленчатым валом, содержащим две симметричные шейки, причем хвостовая часть фюзеляжа содержит горизонтальный стабилизатор, выполненный в виде хвоста птицы, с возможностью поворота вокруг продольной и поперечной осей летательного аппарата, отличающийся тем, что каждое из крыльев содержит главную консоль, соответствующую плечевой и локтевой костям крыла птицы, и выполнено состоящим из центропланного, периферийного и промежуточного участков, центропланный и периферийный участки содержат нервюры, причем нервюры центропланного участка соответствуют аэродинамическому профилю крыла и закреплены на главной консоли посредством плоских пружин с возможностью поворота хорды центропланного участка на 10-20°, периферийный участок является продолжением главной консоли и содержит нервюры в виде прямых реек, составляющих углы от 30 до 60° относительно продольной оси аппарата, а промежуточный участок крыла не содержит нервюр, каждая из двух шеек коленчатого вала соединена с главной консолью соответствующего крыла посредством плоского шарнира в точке, отстоящей от продольной оси фюзеляжа на 1/10 длины крыла летательного аппарата, радиус колена коленчатого вала выбран так, чтобы пределы изменения угла атаки центропланного участка крыла при махе как вверх, так и вниз, составляли 15-30°, в зависимости от скорости полета, точка соединения штока плоского шарнира с консолью крыла выбрана на вертикальной оси, соединяющей верхнюю и нижнюю мертвые точки коленчатого вала, длина штока шарнира подобрана так, чтобы полный угол маха крыла составлял +/-32°, а центропланные участки крыльев гибко соединены друг с другом в головной и хвостовой частях фюзеляжа.
| RU 94036423 A1, 27.07.1996 | |||
| DE 3320985 A1, 14.02.1985 | |||
| КОМПОЗИЦИЯ ДИЗЕЛЬНОГО ТОПЛИВА | 2007 |
|
RU2407777C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |

