Изобретение относится к сверхлегким летательным аппаратам с вертикальным взлетом и посадкой и может быть использовано в лесном, рыбном, сельском хозяйстве, геологии и в других областях народного хозяйства преимущественно для доставки и перевозки груза, людей в труднодоступные промысловые места (или из этих труднодоступных мест).
Известны летательные аппараты, которые совершают вертикальный взлет и посадку. К ним, например, относятся вертолеты [Л.Х.Кокунина. “Основы аэродинамики”. Учебник для училищ гражданской авиации. М., “Транспорт”, 1976. - с.180-181]. Основными частями вертолета являются несущий винт, который преобразует энергию вращения вала двигателя в энергию поступательного движения воздуха относительно винта, создает управляемость и возможность движения вертолета в вертикальной и горизонтальной плоскостях; хвостовой винт для уравновешивания реактивного момента несущего винта; фюзеляж; стабилизатор для обеспечения продольной устойчивости вертолета; хвостовую балку; шасси и двигатель. Вертолеты предназначены для доставки, перевозки груза, пассажиров в условиях бездорожья. Для них не требуется строительства специальных площадок для взлета и посадки, они могут при необходимости “зависать” в воздухе. Однако его применение для труднодоступных мест ограничено, поскольку требуемая площадь для осуществления взлета (или посадки) вертолета может далеко не соответствовать площади труднодоступных мест. К тому же использование вертолета в качестве транспорта для доставки груза, людей порой бывает экономически нецелесообразным.
Известно также, что для перевозки людей, груза, оборудования используются и сверхлегкие летательные аппараты - мотодельтапланы (дельталеты). В тех случаях, где требуется доставка сравнительно небольших грузов и не требуется высокая скорость, использование сверхлегких летательных аппаратов экономичнее. Они способны поднимать груз, в 1,5-3 раза превышающий их собственную массу. Т.о. масса конструкции дельтапланов относительно поднимаемого груза составляет 30-40% (а у вертолета 63-68%). К тому же себестоимость их летного часа в несколько раз меньше, чем у вертолетов. Расход топлива также в 20-30 раз меньше (А.П.Клименко, И.В.Никитин. Мотодельтапланы: Проектирование и теория полета. - М.: Патриот, 1992. - с.31).
Известен мотодельтаплан по патенту РФ №2188144, МПК 7 В 64 С 31/028. Он содержит крыло с дугообразной передней кромкой, рулевую трапецию с подкосом, связывающим концевые участки крыла, мотораму с двигателем и воздушным винтом, который расположен в конце над крылом. Поверхность крыла за плоскостью вращения винта имеет дугообразную кромку для забора воздушного потока от нижней части площади, ометаемой винтом, и расположена выше поверхности крыла перед плоскостью вращения лопастей винта.
За прототип заявляемого сверхлегкого летательного аппарата принята типовая конструкция дельталета, описанная в книге А.П.Клименко, И.В.Никитина. (Мотодельтапланы: Проектирование и теория полета. - М.: Патриот, 1992. - с.98-111). Дельталет содержит несущую систему из каркаса и обшивки (крыло), систему управления, которая включает трапецию, жестко соединенную с крылом, пилон, на котором посредством двухстепенного шарнира установлено крыло. Управление дельтапланом осуществляется путем перемещения центра масс относительно крыла, т.е. балансирным способом. Крыло может отклоняться относительно мототележки, на которой установлен пилон, вокруг продольной оси (поперечный канал управления) или вокруг поперечной оси (продольный канал управления). Балансировка осуществляется соответствующим отклонением трапеции. На килевой балке крыла болтами закреплен швеллер. Это узел навески крыла, в котором и закреплены трапеция и пилон. Узел навески является единственной “точкой” опоры крыла о мототележку (мотораму). Мототележка является частью подвесной системы, соединенной с системой управления. Мототележка предназначена для размещения экипажа, двигателя, топливного бака и приборного оборудования. Кроме этого, дельталет содержит тросовые растяжки крыла, пилона, стоек шасси.
Для взлета дельталета характерны такие этапы, как разбег, отрыв, набор высоты. Естественно, что для разбега необходима определенная площадь, зависящая от массы дельталета, площади крыла, скорости отрыва. При этом длина разбега и взлетная дистанция зависят от уклона местности, плотности воздуха, направления ветра.
При посадке также необходима посадочная полоса. Длина пробега при посадке может составлять более 50 м. Поэтому дельталет не имеет возможности беспрепятственно проникать в труднодоступные места. Например, в места промыслового произрастания ягод, грибов, охотничьего и рыбного промысла, как правило, не имеющие таких площадей и имеющие много препятствий для осуществления взлета и посадки дельталета. Причем его посадка является одним из наиболее сложных этапов полета, требует от пилота хорошего глазомера, перемещение рулевой трапеции должно быть точным, своевременным. Также своевременным должно быть выравнивание дельталета перед посадкой. Все это усложняет применение дельталета в условиях труднодоступности мест назначения.
Задачей изобретения является создание широкодоступного и экономичного сверхлегкого воздушного транспортного средства, способного проникать в труднодоступные места, ограниченные малой площадью.
Задача решена следующим образом.
По аналогии с прототипом заявляемый летательный аппарат содержит горизонтальную несущую систему, выполненную из жесткого каркаса и обшивки, систему управления пилотом этой несущей системы, подвесную систему, включающую мотораму, установленные на мотораме двигатель, кресло для пилота и топливный бак, узел навески несущей системы, связывающий ее с системой управления и подвесной системой. Но в отличие от прототипа по первому варианту исполнения заявляемый летательный аппарат дополнительно содержит пространственной формы раздвижной механизм из двух шарнирно-рычажных систем в виде пантографов, смонтированный в центральной части моторамы, и узел вертикальной стабилизации раздвижного механизма, размещенный между шарнирами, расположенными в местах пересечения длинных, верхних, и коротких, нижних, рычагов пантографов, и выполненный в виде неподвижного элемента, соединенного с этими шарнирами, и подвижного элемента, установленного с возможностью соосного вертикального перемещения относительно неподвижного элемента и соединенного посредством кривошипно-шатунного механизма с двигателем, при этом несущая система выполнена в виде купола тарельчатой формы, а обшивка каркаса купола состоит из эластичных пластинчатых элементов, размещенных в гнездах этого каркаса с возможностью пропуска воздуха при движении купола вверх. Отличием является и то, что узел навески размещен в центре купола и состоит из крестовины, шарнирно соединенной со стержнем, жестко закрепленным в каркасе купола, полого штока, жестко соединенного снизу с крестовиной, и надетой на шток с возможностью скольжения по нему втулки, шарнирно связанной с длинными рычагами пантографов, причем верхние шарниры, расположенные в местах пересечения длинных рычагов пантографов, соединены по их общей осевой линии с крестовиной узла навески, а нижние шарниры в местах пересечения коротких рычагов тоже соединены по их общей осевой линии и связаны с подвижным элементом узла стабилизации. При этом система управления несущей системы выполнена в виде гидросистемы, гидроцилиндры которой шарнирно установлены на концах крестовины и соединены попарно и последовательно с маслопроводами, которые размещены по длинным рычагам пантографов, а штоки гидроцилиндров шарнирно связаны с каркасом купола. Двигатель может быть снабжен также тяговым винтом и редуктором.
По второму варианту исполнения заявляемый летательный аппарат отличается от прототипа тем, что он дополнительно содержит пространственной формы раздвижной механизм из двух одинаковых шарнирно-рычажных систем в виде пантографов, смонтированный в центральной части моторамы, а двигатель, являющийся одновременно узлом вертикальной стабилизации раздвижного механизма, выполнен в виде вертикального цилиндра, жестко установленного на мотораме и соединенного с шарнирами по их общей осевой линии в местах пересечения длинных и коротких рычагов пантографов, поршня, соединенного с нижними шарнирами по их общей осевой линии в местах пересечения коротких рычагов пантографов, нижней и верхней камер сгорания, размещенных внутри цилиндра, при этом несущая система выполнена в виде купола тарельчатой формы, а обшивка каркаса купола состоит из эластичных пластинчатых элементов, размещенных в гнездах каркаса с возможностью пропуска воздуха при движении купола вверх, кроме этого, узел навески размещен в центре купола и состоит из крестовины, шарнирно соединенной со стержнем, жестко закрепленным в каркасе купола, штока, жестко соединенного снизу с крестовиной, и втулки, надетой на шток с возможностью скольжения по нему и шарнирно связанной с длинными рычагами пантографов, причем верхние шарниры, расположенные в местах пересечения длинных рычагов пантографов, соединены по их общей осевой линии с крестовиной узла навески, кроме этого, система управления несущей системой выполнена в виде гидросистемы, гидроцилиндры которой размещены на концах крестовины и соединены попарно и последовательно с маслопроводами, размещенными на длинных рычагах пантографов, а штоки гидроцилиндров шарнирно соединены с каркасом купола. Отличием от прототипа является также то, что моторама снабжена грузовой кассетой и быстроразъемными замками для установки ее и топливного бака. Грузовая кассета и топливный бак установлены снизу моторамы.
Отличия от прототипа подтверждают новизну заявляемого объекта изобретения.
Все перечисленные отличительные признаки позволяют осуществить заявляемому летательному аппарату вертикальные взлет и посадку.
Вертикальное перемещение летательного аппарата обеспечивается, во-первых, тем, что он снабжен раздвижным механизмом, выполненным из двух пантографов. При вращении двигателя (первый вариант исполнения) приходит в движение подвижный элемент, с которым соединены пантографы. В результате рычаги этих пантографов складываются или растягиваются, а купол, находясь в горизонтальном положении, совершает с большой скоростью и амплитудой возвратно-поступательное движение в вертикальной плоскости. По второму варианту при поочередном сгорании топлива в верхней и нижней камере поршень совершает возвратно-поступательное движение и тем самым аналогично первому варианту заставляет рычаги пантографов складываться или растягиваться.
Во-вторых, за счет открытия или закрытия во время движения купола эластичных пластинчатых элементов происходит автоматическое изменение площади несущей поверхности (купола). Причем при движении вверх под действием встречного потока воздуха эти элементы отогнуты вниз, и купол не оказывает существенного аэродинамического сопротивления, которое, как известно, определяется по формуле

Fл - сила лобового аэродинамического сопротивления, кг;
Су - коэффициент аэродинамического сопротивления;
ρ - удельный вес воздуха, равный 1,293 кг/м3;
V - скорость вертикального движения несущей системы; м/сек;
S - площадь поверхности, перпендикулярной потоку воздуха (площадь несущей системы), м2;
g - ускорение свободного падения, равное 9,81 м/сек2.
Варьируя площадью несущей системы, скоростью ее вертикального движения, которая зависит от числа оборотов двигателя, длины радиуса кривошипа коленчатого вала кривошипно-шатунного механизма, длины рычагов пантографов, можно менять аэродинамическое сопротивление и получить его необходимую величину для взлета аппарата. По сути заявляемый летательный аппарат является парашютом с активным куполом, позволяющим осуществить вертикальный взлет за счет искусственного увеличения аэродинамического сопротивления. Неподвижный шток в узле навески, на который надета скользящая втулка, соединение ее посредством шарниров с рычагами пантографов позволяют удерживать крестовину, а следовательно, и купол в горизонтальном положении, который в свою очередь шарнирно соединен с крестовиной. По сути, это не только узел навески аппарата, но и дополнительный, верхний, узел горизонтальной стабилизации купола. Поперечную и продольную устойчивость раздвижного механизма обеспечивает и непосредственно узел вертикальной стабилизации, размещенный в местах пересечения длинных и коротких рычагов пантографов.
Гидроцилиндры, размещенные в узле навески и соединенные штоками с несущей системой, обеспечивают после набора необходимой высоты горизонтальный полет летательного аппарата в любом направлении. Они управляются пилотом с пульта управления и не зависят от работы двигателя. Штоки гидроцилиндра, шарнирно соединенные с куполом, позволяют ему отклоняться от горизонтали, тем самым создавая наряду с вертикальной горизонтальную силу тяги. При наличии тягового винта скорость горизонтального полета увеличивается.
Таким образом, на вертикальный взлет и посадку заявляемого летательного аппарата влияет площадь несущей поверхности и скорость ее возвратно-поступательного движения, зависящая от длины рычагов пантографов, радиуса кривошипа коленчатого вала, числа оборотов двигателя. При этом взлет осуществляется при равномерном распределении нагрузки по поверхности купола на площади, определяемой площадью купола. Являясь альтернативой вертолету, заявляемому аппарату требуется намного меньше площади. И в сравнении с прототипом площадь для взлета этого аппарата намного меньше. К тому же выполнение купола тарельчатой формы, напоминающей парашют, позволяет аппарату, как и вертолету, изменяя скорость вращения двигателя, зависать в воздухе. А значит, в случае необходимости доставлять груз в труднодоступные места без посадки, с помощью разъемных захватов для грузовой кассеты. Кроме этого, аппарат легко центрируется относительно оси купола при любом количестве топлива и перевозимого груза и имеет равномерное распределение нагрузки по несущей поверхности купола. Расчеты показали, что при диаметре купола 4 метра, длине верхних рычагов пантографов 1 метр, а нижних 0,1 метра подъемная сила аппарата составляет 890 кг. При этом вес всего аппарата без подвесной системы с применением легких материалов в несколько раз меньше этой величины. И аппарат под действием рычагов раздвижного механизма, вращения двигателя, открытия и закрытия под действием воздушного потока эластичных элементов обшивки купола способен осуществлять вертикальные взлет и посадку, тем самым проникать в труднодоступные места, ограниченные малой площадью. Скорость подъема зависит от мощности двигателя, определяемой по формуле

где N - мощность двигателя, л.с.;
Fл - сила лобового аэродинамического сопротивления купола, кг;
V - скорость подъема, м/сек.
Автору не известны сверхлегкие летательные аппараты, несущая система которых выполнена в виде купола тарельчатой формы, напоминающей сплющенный парашют, площадь которого, а следовательно, и аэродинамическое сопротивление изменяются при возвратно-поступательном вертикальном перемещении. Неизвестно также соединение несущей поверхности с подвесной системой через раздвижной механизм, выполненный в виде пространственного пантографа.
Выполнение обшивки каркаса из эластичных пластинчатых элементов, имеющих возможность открываться под действием встречного потока воздуха сверху и закрываться под действием встречного потока снизу, а также выполнение раздвижного механизма в виде пантографов, рычаги которых при вращении двигателя складываются или растягиваются, обеспечивают вертикальный ступенчатый взлет аппарата. Таких аппаратов вертикального взлета автором из уровня техники не выявлено.
Вышесказанное говорит о том, что заявляемое устройство явным образом не следует из уровня техники, а значит, соответствует критерию “изобретательский уровень”.
На фиг.1 представлена кинематическая схема сверхлегкого летательного аппарата с вертикальным взлетом и с вертикальной посадкой по первому варианту исполнения, на фиг.2 - узел навески летательного аппарата, на фиг.3 - крепление узла навески в каркасе купола (продольный разрез), на фиг.4 - кинематическая схема выполнения летательного аппарата по второму варианту, на фиг.5 - общий вид заявляемого устройства.
В центральной части моторамы 1 установлен раздвижной механизм из двух пантографов (фиг.1). Верхний параллелограмм 2 одного из них образован длинными рычагами, связанными между собой шарнирами 3, 4, 5, 6, а его нижний параллелограмм 7 образован короткими рычагами, соединенными между собой шарнирами 6, 8, 9, 10. Верхний параллелограмм 11 другого пантографа образован длинными рычагами, соединенными в местах пересечения шарнирами 12, 13, 14, 15, а нижний параллелограмм 16 - короткими рычагами, связанными шарнирами 15, 17, 18, 19. Шарниры 12 и 3, 14 и 5 этих пантографов соединены между собой. Тем самым образован пространственный пантограф, т.е. пространственной формы раздвижной механизм.
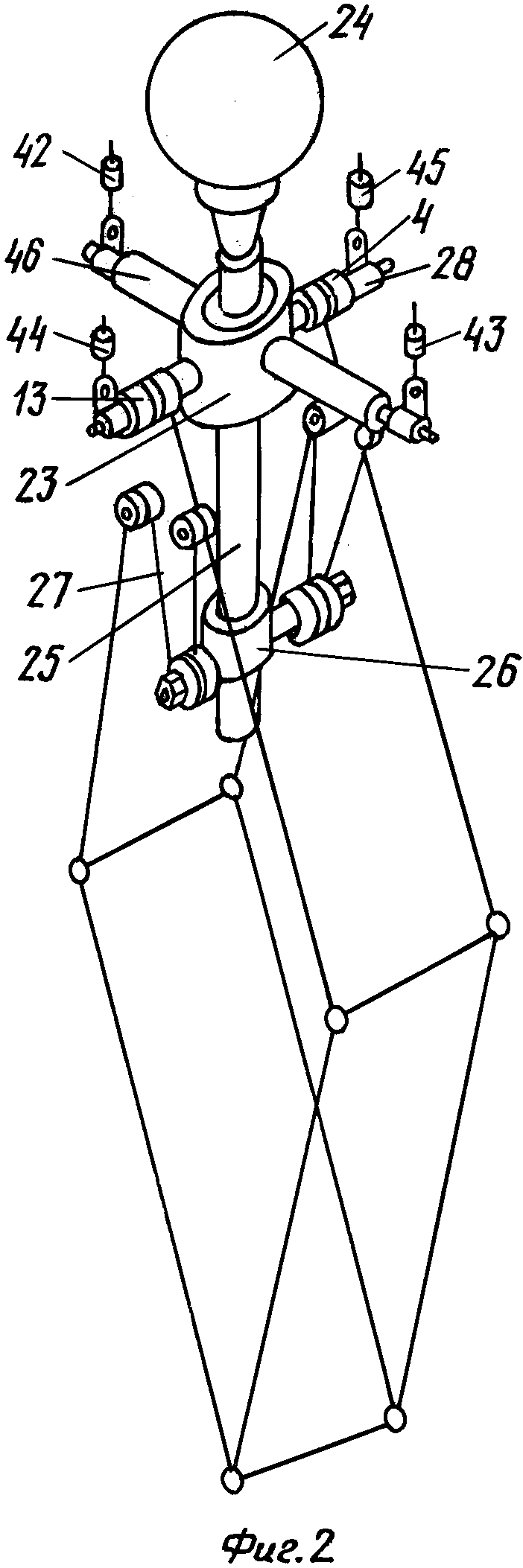
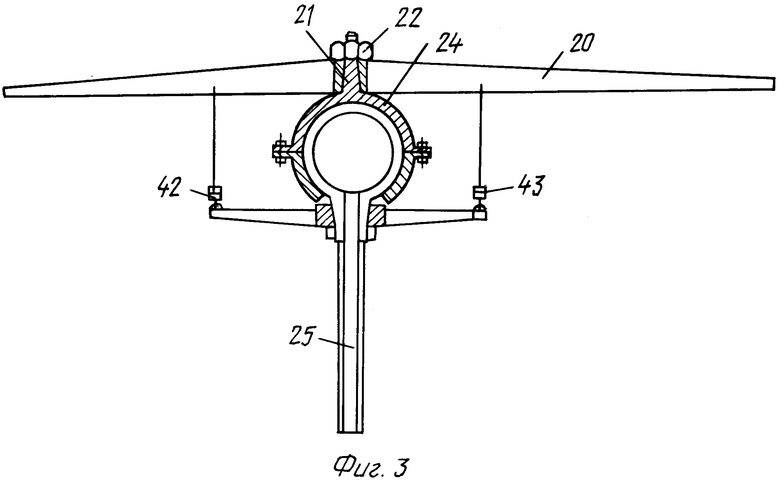
В каркасе 20 купола жестко закреплен стержень 21. На фиг.3 показан один из вариантов его крепления: стержень выполнен с резьбой и закреплен с помощью гайки 22. Со стержнем 21 шарнирно соединена крестовина 23, например, с помощью полого шарового шарнира 24 (фиг.2, 3). С крестовиной 23 жестко соединен шток 25, предпочтительно полый (фиг.3). На шток 25 надета втулка 26 (фиг.2), шарнирно связанная рычагами 27 с четырьмя верхними (длинными) рычагами пантографов. Шарнир 24, крестовина 23, шток 25 и втулка 26 образуют узел навески несущей системы. Шарниры 4 и 13 соединены по их общей осевой линии с поперечиной 28 крестовины 23 (фиг.2). Шарниры 9 и 18 соединены по их общей осевой линии поперечиной 29 и закреплены в одном из вариантов исполнения на шатуне 30 кривошипно-шатунного механизма 31 (фиг.1). Таким образом, обеспечено соединение несущей системы с подвесной системой, включающей мотораму 1, на которой установлены двигатель внутреннего сгорания 32, кривошипно-шатунный механизм 31, топливный бак 33, грузовая кассета 34 (на фиг.1 позициями 33 и 34 помечены места расположения топливного бака и грузовой кассеты) и кабина пилота 35 (фиг.5).
Между шарнирами 6 и 15 размещен узел стабилизации. Он содержит неподвижный элемент 36, выполненный, например, в виде втулки, как показано на фиг.1, которая с помощью поперечины 37, проходящей через шарниры 6 и 15, жестко закреплена на стойке (фюзеляже) 38 моторамы 1 (фиг.1). Внутри этой неподвижной втулки 36 установлен подвижный элемент 39, выполненный в виде штока, на который надета пружина компенсации 40 для обеспечения плавности хода пантографов.
Двигатель 32 может быть выполнен с тяговым винтом 41 (фиг.5).
Система управления выполнена в виде независимой от двигателя 32 гидроситемы, гидроцилиндры 42, 43, 44, 45 которой установлены на концах крестовины 23: одна пара гидроцилиндров 42 и 43 - на поперечине 46 крестовины 23, другая, 44 и 45, - на поперечине 28 крестовины 23, соединяющей шарниры 4 и 13 (фиг.2). Эти пары гидроцилиндров соединены последовательно маслопроводами, размещенными по длинным рычагам пантографов, с пультом управления, расположенным в кабине пилота 35 (на чертеже не показано).
Обшивка купола состоит из множества эластичных пластинчатых элементов 47, установленных в гнездах каркаса 20 (фиг.1, 5). Для облегчения сборки группы эластичных элементов 47 предварительно собраны в матрицы, которые потом устанавливают в каркасе 20 купола. Для снижения оборотов кривошипно-шатунного механизма (фиг.1) служит редуктор 48. Во втором варианте исполнения двигатель выполнен в виде цилиндра 49 (фиг.4), внутри которого размещены верхняя 50 и нижняя 51 камеры сгорания топлива и поршень 52. Экономичнее выполнить нижнюю камеру сгорания 51 большего объема. Двигатель является одновременно узлом вертикальной стабилизации, в котором роль неподвижного элемента выполняет цилиндр 49, а подвижного - поршень 52, соединенный с нижними шарнирами по их общей осевой линии в местах пересечения коротких рычагов пантографов.
Устройство работает следующим образом.
В исходном состоянии, когда двигатель 32 не работает, рычаги пантографов сложены, и купол находится в крайнем нижнем положении. Эластичные элементы 47 обшивки купола находятся в горизонтальном положении и плотно прижаты к гнездам каркаса 20. При включении двигателя 32 приходит во вращение коленчатый вал кривошипно-шатунного механизма 31 (вариант исполнения фиг.1), и шатун 30, уходя из крайнего верхнего положения, приводит в движение рычаги пантографов, тем самым растягивая верхние 2, 11 и нижние 7,16 параллелограммы пантографов. При достижении шатуном 30 крайнего нижнего положения купол займет крайнее верхнее положение. В это время при движении купола вверх элементы 47 обшивки купола отогнуты вниз под действием встречного потока воздуха сверху, т.е. приоткрыты, и купол не оказывает во время движения вверх существенного аэродинамического сопротивления. В крайнем верхнем положении скорость движения купола равна нулю, поэтому под действием сил упругости элементы 47 (фиг.1, 5) каркаса 20 закрываются, занимают горизонтальное положение и плотно прилегают к гнездам. Площадь купола становится максимальной. В этом положении компенсационная пружина 40 (фиг.1) оказывается сжатой. Коленчатый вал кривошипно-шатунного механизма, продолжая вращаться, вынуждает рычаги пантографов складываться, чему способствует также и энергия сжатой ранее компенсационной пружины 40. Купол с нарастающей скоростью, достигающей максимума через четверть оборота коленчатого вала, уходит вниз, испытывая максимальное аэродинамическое сопротивление, увеличивающееся по мере увеличения числа оборотов двигателя 32. Это сопротивление и является в данном случае подъемной силой аппарата. Если оно превышает вес аппарата, то подвесная система под действием складывающихся рычагов пантографов, оторвавшись от земли, на несколько сантиметров подтянется к куполу.
Согласно известной вышеприведенной формуле (1) аэродинамическое сопротивление, а следовательно, и подъемная сила находятся в квадратичной зависимости от скорости. Поэтому варьировать скоростью движения купола можно трояко: меняя радиус кривошипа коленчатого вала 31, длину рычагов больших параллелограммов пантографов 2, 11, что приведет к изменению амплитуды возвратно-поступательного движения аппарата, либо увеличивая число оборотов двигателя 32. Аналогично и во втором варианте (фиг.4). При работе двигателя поршень 52 совершает возвратно-поступательное движение, тем самым заставляет двигаться рычаги пантографов, и работа аппарата аналогична первому варианту.
После завершения рабочего хода аппарат под действием силы тяжести начинает падать (обратный ход купола). Пантографы, уходя вверх (растягиваясь), добавят всему аппарату дополнительный импульс от движущихся масс. Такой же импульс, но с обратным знаком, аппарат получит и при рабочем ходе купола. Расчеты показали, что величина подъема заявляемого летательного аппарата во время рабочего хода (вверх) больше величины падения (обратный ход). Например, при весе аппарата 500 кг, числе оборотов двигателя 15 об/сек величина подъема аппарата (рабочий ход в этом случае составляет 1/30 сек) составит 4,2 см, а величина падения 0,54 см. Поэтому аппарат совершает возвратно-поступательное перемещение и скачкообразно поднимается вверх. Эти действия повторяются и до достижения необходимой высоты полета, и при горизонтальном полете.
После вертикального ступенчатого набора необходимой высоты летательный аппарат переводится в режим горизонтального полета отклонением от горизонтали всего купола на несколько градусов гидроцилиндрами 42, 43, 44, 45, управляемыми пилотом с пульта управления через маслопроводы, размещенные по длинным рычагам пантографов. Штоки этих гидроцилиндров связаны непосредственно с несущей системой. Шарнирно связанная с куполом крестовина 23, на которой установлены гидроцилиндры, удерживается в горизонтальном положении за счет неподвижного штока 25, скользящей втулки 26 и четырех шарнирных рычагов 27. Поскольку гидросистема не зависит от работы двигателя 32, она позволяет осуществлять и управляемое снижение в случае отказа двигателя 32. При наличии тягового винта 41 и его включении скорость горизонтального полета может быть увеличена. При посадке тяговый винт 41 отключают. При снижении оборотов двигателя 32 (фиг.1) или снижении числа хода поршня 52 (фиг.4) меняется аэродинамическое сопротивление снизу купола (снижается), и аппарат либо зависает в воздухе, либо в зависимости от величины этого сопротивления снижается.
Узел стабилизации, состоящий из неподвижного элемента 36, закрепленного на стойке моторамы 1, и подвижного элемента 39, через который осуществляется связь пантографов с двигателем, обеспечивает продольную и поперечную устойчивость раздвижного механизма. Во втором варианте эта устойчивость обеспечивается конструкцией самого двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕЛЬТАЛЕТ | 2008 |
|
RU2387580C2 |
| ДЕЛЬТАЛЕТ | 2010 |
|
RU2465174C2 |
| ДЕЛЬТАЛЕТ | 2000 |
|
RU2186713C2 |
| МОТОДЕЛЬТАПЛАН | 1998 |
|
RU2188144C2 |
| МИКРОСАМОЛЕТ | 1993 |
|
RU2095284C1 |
| ПИЛОТИРУЕМЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С ДОПОЛНИТЕЛЬНЫМ ВОДОРОДНЫМ МОДУЛЕМ | 2014 |
|
RU2571153C1 |
| АВТОЖИР, СПОСОБ ЕГО ПРЕОБРАЗОВАНИЯ В СТОЯНОЧНОЕ ПОЛОЖЕНИЕ И СПОСОБ РЕГУЛИРОВАНИЯ ЕГО ЦЕНТРОВКИ | 1992 |
|
RU2005657C1 |
| СВЕРХЛЕГКИЙ САМОЛЕТ | 2005 |
|
RU2336200C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ И/ИЛИ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ С УКОРОЧЕННЫМ ПРОБЕГОМ | 2021 |
|
RU2764311C1 |
| ИНДИВИДУАЛЬНЫЙ СКЛАДЫВАЮЩИЙСЯ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1991 |
|
RU2094318C1 |


Изобретение относится к летательным аппаратам. Аппарат содержит несущую систему, выполненную в виде купола тарельчатой формы, и подвесную систему, представляющую собой мотораму с установленными на ней двигателем, креслом для пилота, топливным баком и грузовой кассетой. Купол имеет жесткий каркас. Обшивка купола выполнена из эластичных пластинчатых элементов, размещенных в гнездах каркаса с возможностью поворота под воздействием встречного потока воздуха, пропуская его. Подвесная система через раздвижной механизм, который выполнен из двух шарнирно-рычажных систем в виде пантографов и кинематически связан с двигателем, с помощью узла навески соединена с куполом. Узел навески выполнен в виде крестовины, расположенной между шарнирами в местах пересечения длинных верхних рычагов пантографов и соединенной с ними по их общей осевой линии. Сверху крестовина шарнирно соединена со стержнем, жестко закрепленным в каркасе купола. При работе двигателя пантографы складываются или растягиваются. Поступательное движение аппарата происходит за счет отклонения купола с помощью гидроцилиндров, установленных в узле навески на концах крестовины и шарнирно связанных через штоки с куполом. Маслопроводы гидроцилиндров, управляемых пилотом, размещены на длинных рычагах пантографов. Для поперечной и продольной устойчивости пантографов служит узел стабилизации, расположенный между шарнирами в местах пересечения длинных и коротких рычагов пантографов. Во втором варианте исполнения аппарата узлом вертикальной стабилизации служит сам двигатель, выполненный в виде цилиндра, установленного на мотораме, внутри которого размещены поршень, верхняя и нижняя камеры сгорания. Поршень двигателя соединен с раздвижным механизмом. Технический результат – расширение функциональных возможностей. 2 н. и 3 з.п. ф-лы. 5 ил.

| КЛИМЕНКО А.П | |||
| и др | |||
| Мотодельтапланы: проектирование и теория полета | |||
| - М.: Патриот, 1992, с.98-111 | |||
| GB 190918982 A, 16.06.1910 | |||
| ДИФРАКЦИОННЫЙ ИК-СПЕКТРОМЕТР ДЛЯ ИССЛЕДОВАНИЯ ТОНКИХ ПЛЕНОК | 1986 |
|
SU1514046A1 |

