Заявляемый способ построения изображения подповерхностных объектов относится к георадарам, а именно радиолокационным системам, использующим сверхширокополосные (СШП) сигналы, предназначенным для обнаружения и отображения подповерхностных объектов. Способ может быть использован в военном деле, строительстве, археологии и других областях для обнаружения различных, в том числе и не металлических предметов.
Известен способ построения изображения подповерхностного объекта [1], заключающийся в том, что четырьмя антеннами излучают, а пятой - приемной принимают зондирующие сигналы, измеряют углы приема и время распространения зондирующих сигналов, совместно анализируют результаты измерений и строят изображение подповерхностного объекта.
Недостатки такого способа заключаются в его ограниченных возможностях, в частности, в том, что он позволяет обнаруживать лишь четыре отражающих точки, что явно недостаточно для формирования внятного изображения. Кроме того, этот способ не позволяет определить свойства подстилающей поверхности.
Известен способ построения изображения подповерхностного объекта [2], предусматривающий помимо традиционного СШП зондирования подповерхностных объектов с использованием одной излучающей и одной приемной антенны ультразвуковое определение координат антенного блока при его перемещении. Таким образом, желаемое разрешение достигается за счет сканирования подповерхностного пространства.
Недостатки такого способа заключаются в том, что проблема определения текущих координат антенн, как и в других подобных способах, решается сложно и недостаточно точно. Эти неточности существенно влияют на результат зондирования. Помимо этого, для реализации этого способа позиционирования необходимо наличие плотной однородной среды, хорошо проводящей звук и не рассеивающей его, что не выполняется при поиске заглубленных объектов в реальных грунтах и большинстве других вмещающих сред. Кроме того, этот способ не позволяет определить свойства подстилающей поверхности.
Известны способы построения изображения подповерхностного объекта [3], [4], заключающиеся в том, что излучают СШП сигнал, принимают отраженный сигнал, нормируют с учетом затухания в среде, сравнивают амплитуду отклика с установленным порогом обнаружения, при превышении установленного порога вырабатывают сигнал обнаружения аномалии и оценивают глубину ее залегания, перемещают антенну георадара, повторяя зондирование, до точки пропадания сигнала обнаружения аномалии, сканируют аномалию, для чего перемещают антенну георадара над аномалией, многократно повторяя зондирование, запоминают отклики, по которым оценивают характеристики аномалии, формируют ее радиолокационный образ. При этом требуется знание характеристик грунта в области поиска. Результатом поиска в данных способах является получение контура (границ) подповерхностного объекта и глубины его залегания.
Недостатками данных способов являются низкая информативность полученного изображения подповерхностного объекта (только контуры); низкая точность определения размеров подповерхностного объекта, связанная с отсутствием или сложностью получения информации о координатах антенного блока при его перемещении, низкая точность определения глубины залегания подповерхностного объекта из-за низкой достоверности априорной информации о свойствах среды, особенно в условиях неоднородных и многослойных грунтов.
Известен способ определения диэлектрических свойств, в том числе и многослойной среды [5], заключающийся в том, что сравнивают амплитуды отклика от полного отражателя с откликом от среды. Такой способ применим только к однородным средам, например к асфальтовому покрытию.
Известен способ построения изображения подповерхностного объекта [6], заключающийся в том, что выбирают объем исследуемого пространства, разбивают на точечные элементы, облучают каждый элемент зондирующими сигналами от нескольких антенн. Задержку излучения в каждой антенне выбирают так, чтобы зондирующие сигналы от разных антенн поступили к выбранному точечному элементу одновременно. Принимают синфазные сигналы в рассчитанный момент времени. Обнаруживают отраженные сигналы. Сканируют весь объем исследуемого пространства, изменяя времена задержки. Строят полутоновое изображение объекта с учетом амплитуд обнаруженных сигналов.
Недостатком такого способа является высокая трудоемкость, связанная с тем, что при отсутствии априорной информации о положении объекта пространственное сканирование объема требует большого количества измерений и вычислений. Кроме того, амплитуда сигнала, полученного от точечного элемента, зависит от множества факторов, в частности от формы, ориентации и материала исследуемого объекта, а также от диэлектрических и кондуктивных свойств вмещающей среды, в общем случае неоднородной. В этих условиях амплитуду полученного сигнала вряд ли можно рассматривать как информативный параметр, позволяющий строить полутоновое изображение, а лишь как индикационный - позволяющий судить о наличии или отсутствии объекта. Кроме того, данный метод подвержен заметному влиянию помех от других объектов, близко расположенных от объекта поиска.
Наиболее близким к заявляемому является способ построения изображения подповерхностного объекта [7], заключающийся в том, что неподвижным антенным блоком, состоящим из сосредоточенных магнитной и электрической антенн, причем электрическая антенна содержит два приемных элемента (они же используются как передающие), образующих ортогональный базис, а магнитная антенна содержит три приемных элемента, образующих ортогональный базис, принимают отражения зондирующего сигнала.
Недостатки данного способа состоят в том, что данный способ позволяет обнаружить лишь направление на отражающую и/или рассеивающую точку подповерхностного объекта и по априорным данным о свойствах подстилающей поверхности оценивать расстояние до нее. Данный способ не позволяет определить наличие или отсутствие взаимосвязи обнаруженных отражающих/рассеивающих точек между собой, т.е. определить их принадлежность тому или иному объекту (объектам). Данный способ неустойчив к воздействию взаимных помех от разных объектов, отклики от которых приходят одновременно друг с другом. Такой способ применим лишь для дистанционного обнаружения объектов, например при исследовании строения коры литосферы планет (как в прототипе) или при перемещении измерителя относительно объекта. В последнем случае, однако, помимо увеличения времени сбора данных возникают большие трудности с получением координатной информации с точностью, необходимой для построения качественного изображения. Кроме того, этот способ не позволяет определить свойства подстилающей поверхности.
Таким образом, общими, логически связанными проблемами всех СШП методов построения изображения подповерхностных объектов являются:
- получение изображения подповерхностного объекта требует множественных измерений с разных направлений;
- использование большого количества излучающих и приемных блоков требует больших аппаратных затрат;
- ручное перемещение измерителей происходит по сложной траектории с переменной скоростью и высотой;
- точное измерение текущего положения измерителя сопряжено с существенными техническими проблемами, а погрешности в этих измерениях существенно влияют на качество получаемого изображения;
- точность построения изображения подповерхностного объекта зависит от знания свойств среды, окружающей объект;
- свойства среды неизвестны и меняются при перемещении измерителя;
- среда неоднородна.
Вместе с тем СШП зондирование дает огромный объем информации о подповерхностном объекте, которую нужно научиться использовать.
Задача, решаемая заявляемым способом, состоит в построении более детального по сравнению с аналогами изображения подповерхностного объекта с учетом его формы, глубины залегания и свойств среды методами СШП радиолокации.
Для решения поставленной задачи в способе построения изображения подповерхностного объекта по п.1 формулы изобретения, заключающемся в том, что неподвижным антенным блоком, состоящим из сосредоточенных магнитной и электрической антенн, причем каждая антенна содержит не менее двух приемных элементов, образующих ортогональный базис, с общим числом приемных элементов не менее 5, принимают отражения зондирующего сигнала, устанавливают антенную решетку, состоящую из нескольких описанных антенных блоков, закрепленных на общем основании с передающей зондирующей антенной, так, чтобы предполагаемый объект исследования находился в их ближней зоне, излучают одинаковые одиночные импульсные сверхширокополосные сигналы, измеряют высоту антенных блоков над подстилающей поверхностью, принимают отражения зондирующего сигнала всеми антенными блоками, для каждого антенного блока обнаруживают отражения зондирующего сигнала от подповерхностного объекта, измеряют их и вычисляют мгновенные значения векторов Пойнтинга, обрабатывают их и отображают изображение подповерхностного объекта.
По п.2 формулы изобретения в способе по п.1 подстилающую поверхность разбивают на участки, при совместной обработке мгновенных значений векторов Пойнтинга вычисляют точки их пересечения с подстилающей поверхностью, суммируют амплитуды мгновенных значений векторов Пойнтинга на каждом из указанных участков, отображают полутоновое изображение подповерхностного объекта в виде его проекции на подстилающую поверхность.
По п.3 формулы изобретения в способе по п.1 измеряют время приема отраженных сигналов по отношению к моменту излучения зондирующего сигнала, при совместной обработке мгновенных значений векторов Пойнтинга обнаруживают отражения зондирующего сигнала, принадлежащие одному волновому фронту, выявляют типовые формы волновых фронтов, определяют соответствующие формы элементов подповерхностного объекта, отображают изображение подповерхностного объекта в виде его проекции на подстилающую поверхность с учетом формы его элементов.
По п.4 формулы изобретения в способе по п.1 измеряют время приема отраженных сигналов по отношению к моменту излучения зондирующего сигнала, при совместной обработке мгновенных значений векторов Пойнтинга обнаруживают отражения зондирующего сигнала, принадлежащие одному волновому фронту, обнаруживают «блестящую точку», в которой пересекаются N (N≥2) обращеных мгновенных значений векторов Пойнтинга, вычисляют диэлектрические проницаемости (N-1) слоев среды, в которой находится подповерхностный объект, вычисляют пространственное положение точек подповерхностного объекта с учетом диэлектрических проницаемостей слоев среды, выявляют типовые формы волновых фронтов, определяют соответствующие формы элементов подповерхностного объекта и отображают пространственное изображение подповерхностного объекта с учетом форм его элементов и свойств среды.
По п.5 формулы изобретения в способе по п.п.1-4 описанные действия выполняют в нескольких неподвижных относительно зондирующей антенны положениях основания с установленными антенными блоками с известными относительными координатами, совместно анализируют мгновенные значения векторов Пойнтинга и формы элементов подповерхностного объекта, полученные во всех положениях, отображают изображение подповерхностного объекта с учетом его форм и положения, определенных с разных сторон наблюдения.
Существенными отличиями заявляемого способа по сравнению с прототипом являются следующие.
По п.1 формулы изобретения.
Устанавливают антенную решетку, состоящую из нескольких антенных блоков, таких же, как в прототипе, закрепленных на общем основании. Антенная решетка позволяет провести подробное зондирование построение изображения подповерхностного объекта при неподвижном положении антенн.
В прототипе используют один приемно-передающий антенный блок.
Устанавливают антенны так, чтобы предполагаемый объект исследования находился в ближней зоне антенной решетки, что позволяет добиться высокого разрешения при формировании изображения объекта исследования в соответствии с задачами и условиями поиска.
В прототипе используется дальняя зона.
Для формирования зондирующего сигнала используют дополнительную антенну. Дополнительная антенна позволяет исключить антенные коммутаторы, которые в ближней зоне сверхкороткоимпульсного СШП локатора (длительность импульса - менее 1 нс) не успеют переключить антенны с излучения на прием.
В прототипе излучение и прием производятся одними и теми же антеннами с использованием коммутаторов, что оказывается возможным из-за дальней зоны поиска.
В качестве зондирующих используются одинаковые одиночные импульсные сверхширокополосные сигналы. Такие сигналы позволяют вести их обработку во временной области и решить задачи обнаружения, определения формы подповерхностного объекта и другие, рассмотренные ниже.
В прототипе используются различные способы поляризации зондирующих сигналов с использованием двух излучающих электрических антенн.
Измеряют высоту антенных блоков над подстилающей поверхностью.
В прототипе эта высота известна.
Принимают отражения зондирующего сигнала всеми антенными блоками.
В прототипе отражения зондирующего сигнала принимают одним антенным блоком.
Для каждого антенного блока обнаруживают отражения зондирующего сигнала от подповерхностного объекта и измеряют их.
В прототипе отражения зондирующего сигнала обнаруживают и измеряют одним антенным блоком.
Вычисляют мгновенные значения векторов Пойнтинга всеми антенными блоками.
В прототипе также вычисляют направления приема отраженных сигналов, но одним антенным блоком.
Совместно обрабатывают параметры сигналов, полученных от всех антенных блоков.
В прототипе имеется один антенный блок.
Отображают изображение подповерхностного объекта.
В прототипе задача построения изображения подповерхностного объекта рассматривается в ограниченном смысле, т.е. обнаруживаются отдельные отражающие и/или рассеивающие точки без возможности установления наличия или отсутствия взаимосвязи обнаруженных отражающих/рассеивающих точек между собой, т.е. определения их принадлежности тому или иному объекту (объектам).
По п.2 формулы изобретения.
Подстилающую поверхность разбивают на участки.
В прототипе анализируют точечный отражатель, так что последовательно рассматривать участок поверхности возможно лишь при перемещении измерителя.
При совместной обработке всех мгновенных значений векторов Пойнтинга вычисляют точки их пересечения с подстилающей поверхностью.
В прототипе можно обнаружить лишь одну точку или отдельные не связанные между собой точки.
Суммируют амплитуды мгновенных значений векторов Пойнтинга на каждом из указанных участков.
В прототипе используется лишь один вектор. Следствием этого является крайне низкая помехоустойчивость.
Отображают полутоновое изображение подповерхностного объекта.
В прототипе возможно лишь бинарное изображение одной точки (или отдельных несвязанных между собой точек) в виде ее проекции на подстилающую поверхность, которое несет только координатную информацию.
При совместной обработке полученных результатов вычисляют точки пересечения подстилающей поверхности с обращенными направлениями мгновенных значений векторов Пойнтинга.
В прототипе находится только одна точка (или отдельные не связанные между собой точки) пересечения направления отраженного сигнала с подстилающей поверхностью объекта.
По п.3 формулы изобретения.
При приеме отраженных сигналов измеряют время их приема по отношению к моменту излучения зондирующего сигнала.
В прототипе измерение времени приема отраженных сигналов не описано.
При совместной обработке мгновенных значений векторов Пойнтинга обнаруживают отражения зондирующего сигнала, принадлежащие одному волновому фронту.
В прототипе имеется только один приемный блок, что делает невозможным определение фронта отраженного сигнала. Для получения такой возможности необходимо перемещать прототип, получая при этом точную координатную информацию о его положении.
Выявляют типовые формы волновых фронтов.
В прототипе формы фронтов выявить невозможно. Для получения такой возможности необходимо перемещать прототип, получая при этом точную координатную информацию о его положении.
Определяют формы элементов подповерхностного объекта, соответствующие формам волновых фронтов.
В прототипе это сделать невозможно. Для получения такой возможности необходимо перемещать прототип, получая при этом точную координатную информацию о его положении.
Отображают изображение подповерхностного объекта в виде его проекции на подстилающую поверхность с учетом формы его элементов.
В прототипе возможно определить лишь точку пересечения (или отдельные несвязанные между собой точки) отраженной и/или рассеянной волны с подстилающей поверхностью.
По п.4 формулы изобретения.
Измеряют время приема отраженных сигналов по отношению к моменту излучения зондирующего сигнала. Оценка времени распространения зондирующих сигналов от излучающей антенны к приемной позволяет оценить расстояние между ними, в том числе и с учетом задержки в подстилающей среде.
В прототипе измерение времени приема отраженных сигналов не описано.
При совместной обработке мгновенных значений векторов Пойнтинга обнаруживают отражения зондирующего сигнала, принадлежащие одному волновому фронту, обнаруживают «блестящую точку», в которой пересекаются N (N≥2) обращенных мгновенных значений векторов Пойнтинга, вычисляют диэлектрические проницаемости (N-1) слоев среды, в которой находится подповерхностный объект. Знание свойств среды, окружающей среды позволяет получить более точное изображение объекта.
В прототипе свойства среды не оцениваются.
Вычисляют пространственное положение точек подповерхностного объекта с учетом диэлектрических проницаемостей слоев среды.
Выявляют типовые формы волновых фронтов, определяют соответствующие формы элементов подповерхностного объекта.
Отображают пространственное изображение подповерхностного объекта с учетом форм его элементов и свойств среды.
В прототипе перечисленные признаки отсутствуют.
По п.5 формулы изобретения.
Действия, описанные в п.п.1-4 формулы изобретения, выполняют в нескольких неподвижных относительно передающей зондирующей антенны положениях основания с установленными антенными блоками с известными относительными координатами.
В прототипе вопрос о перемещении антенного блока не рассматривается.
Совместно анализируют вектора Пойнтинга и формы элементов подповерхностного объекта, полученные во всех положениях.
В прототипе нет возможности совместно проанализировать формы элементов подповерхностного объекта, поскольку они не определяются.
Отображают изображение подповерхностного объекта с учетом его форм и положения, обнаруженных с разных сторон наблюдения.
В прототипе такая задача не решается.
В основу достижения поставленной задачи положены следующие идеи.
Антенный блок, состоящий из сосредоточенных и ортогональных электрической и магнитной антенн [6] позволяет измерить компоненты электромагнитного поля и по ним вычислить мгновенное значение вектора Пойнтинга  . Обращенный мгновенный вектор Пойнтинга
. Обращенный мгновенный вектор Пойнтинга  указывает направление на источник излучения.
указывает направление на источник излучения.
При зондировании объектов одиночными СШП сигналами (длительностью единицы и доли наносекунд) вследствие того, что размеры объектов сопоставимы с пространственной длительностью импульса, процессы взаимодействия поля излучения с объектами поиска подчиняются правилам физической оптики. При этом плоская поверхность объекта является в основном отражателем и формирует волновой фронт отраженного сигнала, совпадающий по форме с волновым фронтом зондирующего сигнала. Угловая точка объекта представляется рассеивателем - со сферическим волновым фронтом волны. Ребро объекта в каждой своей точке также рассеивает сигнал, в результате чего волновой фронт плоской зондирующей волны приобретает цилиндрическую форму. Аналогичным образом могут быть проведены рассуждения для других форм подповерхностного объекта и соответствующих типовых форм волновых фронтов отраженных (рассеянных) сигналов. При сложной форме подповерхностного объекта в местах сопряжения его типовых форм возникает интерференция отраженных сигналов, которая препятствует оценке формы волнового фронта отраженных (рассеянных) сигналов и формы элементов подповерхностного объекта. Тем не менее в большинстве случаев удается обнаружить участки отраженных сигналов с характерными формами волновых фронтов, которые позволяют оценить соответствующие формы элементов подповерхностного объекта.
Для нахождения волнового фронта и оценки его формы требуется как минимум два приемных антенных блока, которые позволяют получить лишь форму сечения волнового фронта. Для более подробной оценки форм фронтов требуется большее количество антенных блоков. При этом пропорционально увеличиваются аппаратурные затраты.
Совместный анализ мгновенных значений векторов Пойнтинга, полученных от всех антенных блоков, увеличивает трудоемкость обработки в показательной степени, что требует разработки упрощенных алгоритмов.
Построение радиолокационного изображения подповерхностного объекта, близкого к реальному, требует учета свойств окружающей среды. Оценка свойств среды может быть выполнена также на основе мгновенных значений векторов Пойнтинга с учетом времени распространения сигналов.
Сочетание методов неподвижного размещения антенных блоков и их перемещения позволяет снизить размерность задачи обработки и повысить качество радиолокационного изображения.
Заявляемый способ иллюстрируют следующие графические материалы:
1. Фиг.1. Антенный блок 1, содержащий электрические 2 и магнитные 3 антенные элементы.
2. Фиг.2. Схема отражения (рассеяния) сигналов от подповерхностного объекта.
3. Фиг.3. Антенная решетка.
4. Фиг.4. Отображение суммарных сигналов на подстилающей поверхности.
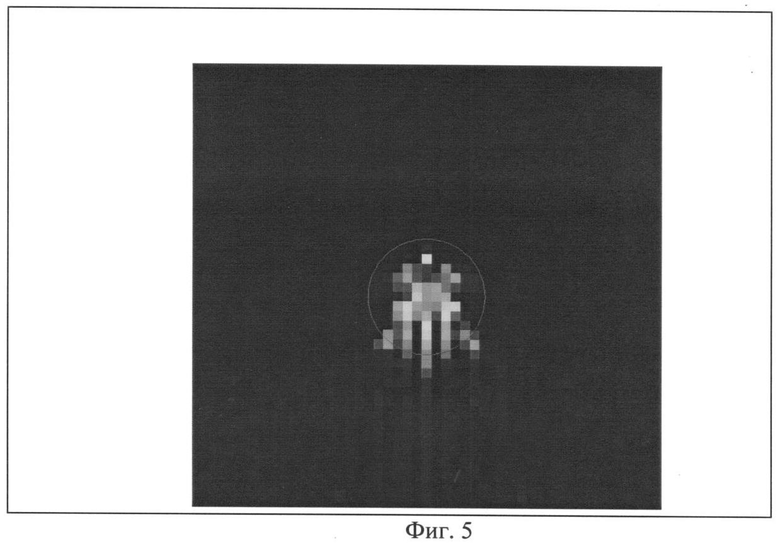
5. Фиг.5. Изображение противотанковой мины на подстилающей поверхности.
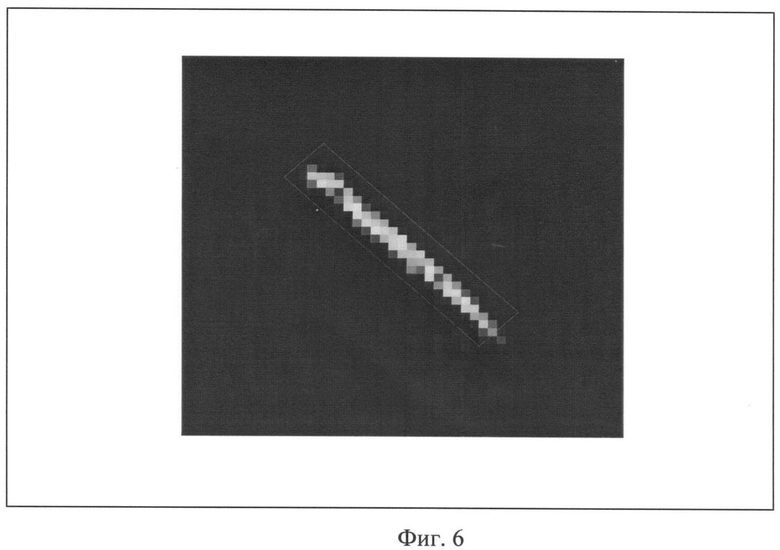
6. Фиг.6. Изображение артиллерийского снаряда на подстилающей поверхности.
7. Фиг.7. Отражение зондирующих сигналов от плоскости.
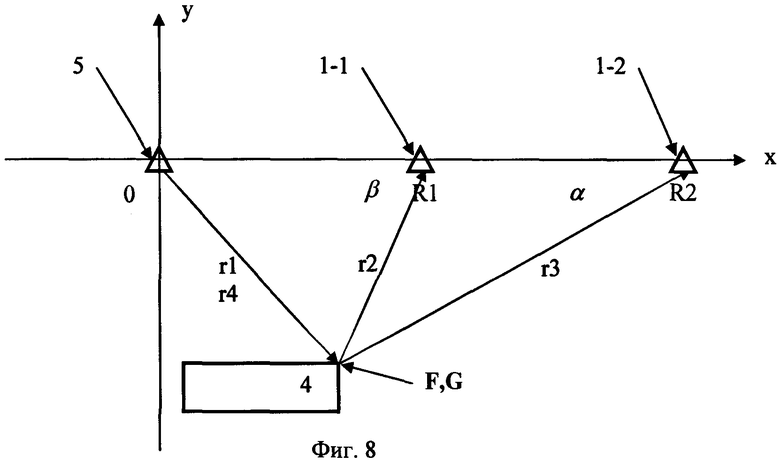
8. Фиг.8. Отражение зондирующих сигналов от угла.
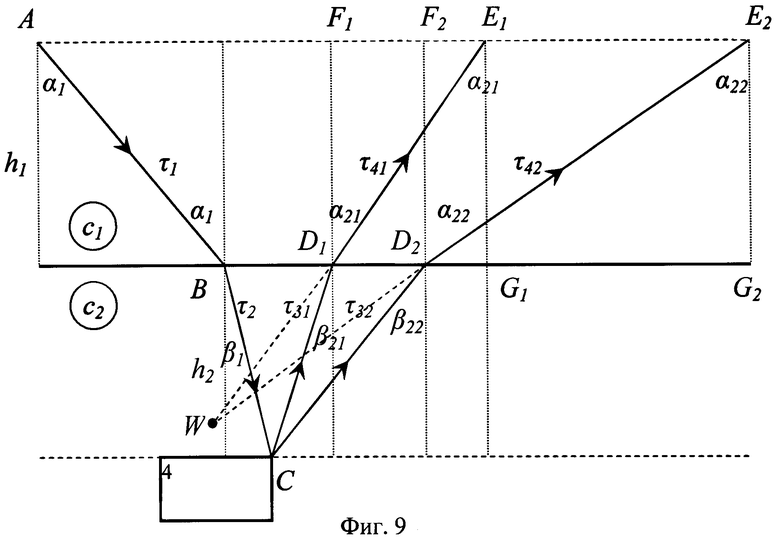
9. Фиг.9. Схема расчета диэлектрической проницаемости среды.
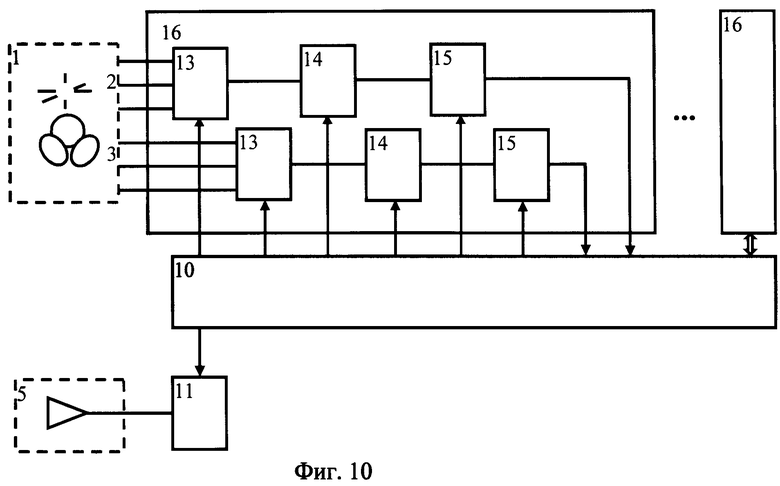
10. Фиг.10. Устройство, реализующее заявляемый способ.
Рассмотрим возможность реализации заявляемого способа по п.1 формулы изобретения.
Антенные блоки 1, фиг.1, содержат в данном случае три электрические 2 и три магнитные 3 приемных элемента, образующих ортогональный базис. Один из указанных приемных элементов может отсутствовать. Каждый приемный элемент предназначен для измерения элементов поля Ex, Ey, Ez и Нх, Ну, Hz соответственно. Приемные элементы располагают либо так близко друг от друга, чтобы антенный блок мог считаться сосредоточенной антенной, либо они могут вращаться, занимая по очереди одно и то же положение в пространстве.
Устанавливают антенную решетку, состоящую из нескольких описанных антенных блоков 1, закрепленных на общем основании 6 с зондирующей антенной 5, фиг.2, 3. Под антенной решеткой будем понимать два и более антенных блоков 1 (1-1, 1-2, 1-3, 2-1 и т.д.). Общее основание 6 позволяет считать относительное пространственное положение антенных блоков 1 фиксированным и известным. Под неподвижным положением антенных блоков 1 будем понимать как их статичное положение, так и перемещение с такой скоростью, при которой изменение положения основания по отношению к объекту исследования 4 за время измерений может считаться несущественным. Антенную решетку устанавливают так, чтобы объект исследования 4 находился в ее ближней зоне, т.е. должно выполняться соотношение

где R - расстояние до объекта поиска, D - линейный размер приемной антенной решетки, λ - пространственная длительность импульса или длина волны, соответствующая максимуму в спектре импульса. Это условие является необходимым для возможности определения формы объекта по двум причинам. Во-первых, импульсные СШП антенны, применяемые для подповерхностного зондирования в реальных средах, принципиально имеют широкую диаграмму направленности, поэтому обеспечить высокую разрешающую способность по направлению за счет направленных свойств импульсных СШП антенн оказывается невозможным. Во-вторых, в дальней зоне все излучатели являются точечными и все излучаемые ими фронты являются глобально сферическими и локально плоскими, то построение изображения объекта, находящегося в дальней зоне, путем анализа форм рассеиваемых им волновых фронтов оказывается невозможным. Поэтому исследование формы объекта осуществляется путем регистрации и анализа форм волновых фронтов, рассеянных объектом, в ближней зоне приемной антенной решетки. Среда, окружающая объект имеет, как правило, значение относительной диэлектрической проницаемости больше 1 (типовые значения - 4…25 в зависимости от типа грунта и его влажности, для воды - 80). Такая среда действует, как фокусирующая линза, увеличивая видимые размеры объекта, в частности, размеры его проекции на поверхность раздела воздух - среда. Кроме того, расстояние до объекта поиска R должно определяться с учетом диэлектрических свойств среды. Если среда состоит из нескольких слоев, то «электрическое расстояние» до объекта будет равно сумме «электрических толщин» (при нормальном падении) всех подстилающих слоев

При этом «электрическая толщина» каждого отдельного слоя будет равна  , где Hi - физическая толщина i-го слоя, εi - относительная диэлектрическая проницаемость i-го слоя.
, где Hi - физическая толщина i-го слоя, εi - относительная диэлектрическая проницаемость i-го слоя.
Размеры объектов поиска в рассматриваемом случае сопоставимы с пространственной длительностью импульса. В таком случае процессы взаимодействия поля излучения с объектами поиска, фиг.2, а именно: правила их распространения, отражения от плоскостей (точка А) и рассеивания на угловых точках и ребрах подповерхностного объекта (точка В) объекта исследования 4 подчиняются известным правилам физической оптики.
Измеряют h - высоту антенных блоков (фазовых центров антенн) над подстилающей поверхностью 7. Для этого могут использоваться как методы непосредственного измерения высоты, так и радиолокационные. В последнем случае сигнал, излученный зондирующей антенной 5 и отраженный от подстилающей поверхности 7, принимается антенными блоками 1, измеряется время распространения зондирующих сигналов и вычисляется высота, а также угол наклона основания 6 (фазовых центров антенных блоков 1) по отношению к подстилающей поверхности 7. Для простоты дальнейших рассуждений будем считать, что основание 6 параллельно подстилающей поверхности 7.
Излучают антенной 5 одинаковые одиночные импульсные СШП зондирующие сигналы. Одинаковые импульсы необходимы для повторяемости измерений. СШП зондирующие сигналы длительностью единицы и доли наносекунд позволяют при анализе отраженных сигналов перейти от традиционного анализа в частотной области к временной. Многократное излучение зондирующих импульсов необходимо для обеспечения возможности стробоскопического приема отраженных (рассеянных) сигналов всеми элементами (2 и 3) и всеми антенными блоками 1 с требуемой временной дискретизацией, а также при всех положениях антенных блоков 1.
Каждым антенным блоком 1 принимают и обнаруживают отраженные (рассеянные) сигналы по превышению заранее установленного порога. В момент обнаружения отраженного (рассеянного) сигнала измеряют мгновенные амплитуды компонент векторов электрического
и магнитного
полей, поступившие на соответствующие элементы 2 и 3 антенного блока 1. Заметим, что векторы  и Н теоретически ортогональны. Для каждого антенного блока 1 вычисляют с точностью до постоянного множителя мгновенные значения векторов Пойнтинга в виде векторного произведения
и Н теоретически ортогональны. Для каждого антенного блока 1 вычисляют с точностью до постоянного множителя мгновенные значения векторов Пойнтинга в виде векторного произведения  , при этом обращенные мгновенные векторы Пойнтинга
, при этом обращенные мгновенные векторы Пойнтинга  направлены на источник отраженного (рассеянного) излучения. Определяют мгновенные векторы Пойнтинга, направленные на подстилающую поверхность. Совместный анализ мгновенных значений векторов Пойнтинга, полученных от пространственно разнесенных элементов антенной решетки, позволяет оценить направления на «блестящие точки» подповерхностного объекта от антенных блоков, расположенных на известной высоте h на общем основании 6 - с известными относительными положениями. В известных [1, 2, 6, 7] способах такая информация считается достаточной, чтобы отобразить изображение подповерхностного объекта.
направлены на источник отраженного (рассеянного) излучения. Определяют мгновенные векторы Пойнтинга, направленные на подстилающую поверхность. Совместный анализ мгновенных значений векторов Пойнтинга, полученных от пространственно разнесенных элементов антенной решетки, позволяет оценить направления на «блестящие точки» подповерхностного объекта от антенных блоков, расположенных на известной высоте h на общем основании 6 - с известными относительными положениями. В известных [1, 2, 6, 7] способах такая информация считается достаточной, чтобы отобразить изображение подповерхностного объекта.
По п.2 формулы изобретения заявляемый способ предполагает выполнение действий, описанных в п.1, и, кроме того, участок подстилающей поверхности в окрестности антенной решетки разбивают на участки (Фиг.4). Для каждого момента обнаружения отраженного сигнала и каждого антенного блока 1 вычисляется мгновенное значение вектора Пойтнинга  (с точностью до постоянного множителя). Обращенный вектор -
(с точностью до постоянного множителя). Обращенный вектор - продолжается до пересечения с подстилающей поверхностью, которая считается известной и заданной уравнением
продолжается до пересечения с подстилающей поверхностью, которая считается известной и заданной уравнением  , где:
, где:  - радиус-вектор из фазового центра антенного блока в точку подстилающей поверхности;
- радиус-вектор из фазового центра антенного блока в точку подстилающей поверхности;  - нормаль к плоскости раздела воздух-почва; d - высота антенного блока над плоскостью раздела воздух-почва.
- нормаль к плоскости раздела воздух-почва; d - высота антенного блока над плоскостью раздела воздух-почва.
Координаты точки пересечения определяются по формуле

где  - координаты точки пересечения;
- координаты точки пересечения;  - координаты фазового центра антенного блока, в котором производилось измерение вектора
- координаты фазового центра антенного блока, в котором производилось измерение вектора  .
.
Обнаруживают все обращенные мгновенные векторы Пойнтинга, попавшие в каждый участок. Суммируют их амплитуды на указанных участках.
Отображают, Фиг.4, проекцию изображения подповерхностного объекта в виде полутонового изображения проекции подповерхностного объекта на подстилающую поверхность с учетом суммарных амплитуд принятых сигналов. При этом из-за дискретизации участков изображение подповерхностного объекта окажется не совпадающим с реальным. Кроме того, следует заметить, что на Фиг.2 отображения на поверхность граничной точки В подповерхностного объекта (рассеивающей точки) - точки D и Е - отличаются.
На фиг.5 и 6 приведены результаты экспериментальных исследований заявляемого способа в виде проекций на подстилающую поверхность отражений от:
Фиг.5 - противотанковой мины.
Фиг.6 - артиллерийского снаряда.
По п.3 формулы изобретения при приеме отраженных сигналов измеряют время распространения зондирующего сигнала от фазового центра антенны 5 до фазовых центров антенных блоков 1.
Совместно обрабатывают мгновенные значения векторов Пойнтинга, полученные разными антенными блоками 1, и обнаруживают отражения зондирующего сигнала, принадлежащие одному волновому фронту. Данная задача является ключевой при реализации п.3 заявляемого способа, поскольку одному и тому же фронту могут принадлежать сигналы, полученные разными антенными блоками 1. При таком подходе необходимо учесть все мгновенные векторы Пойнтига, рассматривая все их сочетания  , где n - общее количество антенных блоков 1, k - количество антенных блоков 1, участвующих в формировании фронта. Размерность такой задачи крайне высока, как и вычислительные ресурсы, необходимые для ее решения. Например, при наличии всего трех антенных блоков 1-1, 1-2 и 1-3 придется рассмотреть сочетания 1-1 и 1.2, 1-2, 1-1 и 1-3, 1-2 и 1-3, а также 1-1, 1-2, 1-3.
, где n - общее количество антенных блоков 1, k - количество антенных блоков 1, участвующих в формировании фронта. Размерность такой задачи крайне высока, как и вычислительные ресурсы, необходимые для ее решения. Например, при наличии всего трех антенных блоков 1-1, 1-2 и 1-3 придется рассмотреть сочетания 1-1 и 1.2, 1-2, 1-1 и 1-3, 1-2 и 1-3, а также 1-1, 1-2, 1-3.
Для снижения размерности поставленной задачи воспользуемся следующими приемами:
- исключим из рассмотрения антенные блоки 1, не обнаружившие отраженный сигнал;
- исключим из рассмотрения антенные блоки 1, у которых обращенный вектор Пойнтинга не попадает в рассматриваемую область подстилающей поверхности;
- совместному анализу подвергнем только пары мгновенных векторов Пойнтинга, лежащие в одной плоскости с зондирующей антенной 5.
Такой подход позволяет оценить форму сечения фронта волны плоскостью. Без ограничения общности будем предполагать, что диэлектрические свойства надповерхностной и подповерхностной сред одинаковы.
Пусть указанным требованиям удовлетворяют векторы Пойнтинга, полученные антенными блоками 1-1 и 1-2, фиг.9, 10. Ограничимся рассмотрением простейших типовых форм фронтов - плоским и сферическим, т.е. в сечении плоскостью фронт волны может быть прямой линией или окружностью. Это не нарушает корректность постановки задачи по следующим причинам. Во-первых, подповерхностная среда, играя роль фокусирующей линзы, искажает изображение объекта, производя над ним некоторое преобразование из класса аффинных преобразований, т.е. искажая пропорции, но сохраняя топологию объекта. Как правило, объект будет казаться больше, чем он есть на самом деле, причем степень искажения будет увеличиваться от центра рассматриваемой области к ее краям. Кроме того, они будет казаться расположенным ближе к поверхности, чем это будет на самом деле. Поэтому на границе раздела воздух-среда со стороны воздуха мы получим некоторое искаженное изображение объекта. Во-вторых, в соответствии с известными законами электродинамики, мы, зная распределение электромагнитного поля в некоторый момент времени на некоторой поверхности, можем однозначно определить распределение поля во всем остальном пространстве в любой произвольный момент времени. Вследствие этого мы можем утверждать, что объект, имеющий искаженную форму и находящийся в воздухе в области пространства, непосредственно примыкающей к границе раздела сред, будет неотличим в радиолокационном смысле от реального объекта, находящегося в грунте на некоторой соответствующей глубине. Разница между ними будет только в величине временной задержки между зондирующим и принятым сигналом: она будет отличаться на некоторую фиксированную величину - для определения формы волновых фронтов это несущественно.
Рассмотрим случай отражения зондирующих сигналов от плоскости, фиг.7.
Зондирующий сигнал, излученный антенной 5, отражается от плоской поверхности объекта 4 в точках F и G, поступает в антенны 1-1 и 1-2 соответственно. Расстояния между зондирующей антенной 5 и антенным блоками 1-1 и 1-2 известны и равны соответственно R1 и R2. Длины путей распространения зондирующего сигнала от точки 0 через точку F до антенного блока 1-1 (r1+r2) и от точки 0 через точку G и до антенного блока 1-2 (r4+r3) можно вычислить по измеренным временам и скоростям распространения соответствующих зондирующих сигналов. Обработка сигналов, полученных антеннами 1-1 и 1-2, позволяет вычислить мгновенные значения векторов Пойнтинга и определить углы α и β. В координатных осях х-у можно записать соотношения для координат (XF, YF) точки F
XF=R1-r2cosβ,
YF=r2sinβ,

Эта система уравнений имеет три неизвестных XF, YF и r2 и может быть решена вне зависимости от наклона плоскости подповерхностного объекта. Аналогичным образом могут быть найдены координаты точки G (XG, YG)
XG=R2-r3cosα,
YG=r3sinα,

Кроме того, координаты точек F и G позволяют вычислить наклон плоскости подповехностного объекта. Проверка указанных соотношений дает возможность определить, является ли фронт принятой волны отражением от плоского подповерхностного объекта.
Фронт волны, рассеянной от точки F (G) подповерхностного объекта 4, на фиг.8 имеет форму окружности в сечении плоскостью. Для этого случая справедливы приведенные выше соотношения при r1=r4.
Таким образом, решением систем уравнений, приведенных выше, являются координаты точек F(ХF, YF) и G(XG, YG). Если указанные координаты различны, то сечение фронта отражения - прямая линия, а если совпадают - то радиальное.
Проведя аналогичные действия для всех пар векторов Пойнтинга, лежащих в одной плоскости с излучающей антенной, можно оценить множество форм волновых фронтов в сечениях плоскостями и восстановить пространственную форму волнового фронта.
Форма волнового фронта связана с формами подповерхностного объекта: так, плоскому участку волнового фронта отраженных (рассеянных) сигналов соответствует плоскость подповерхностного объекта. Сферический фронт волны соответствует углу подповерхностного объекта, цилиндрический - его ребру. Цилиндрические, конические и т.п. участки отражающих поверхностей объекта создадут цилиндрические, конические и т.п. волновые фронты отраженных сигналов.
Совместный анализ сечений плоскостями типовых фронтов отраженных сигналов позволяет оценить эти фронты, а по ним - соответствующие формы подповерхностного объекта. Так, например, если мгновенные значения векторов Пойнтинга, полученные антенными блоками 1-1 и 1-2, позволили выявить радиальную форму фронта, и такой же фронт обнаружен антенными блоками 2-1 и 2-2, то следует сравнить координаты источников рассеяния. Если они совпадают, то перечисленные антенные блоки получили сигнал от угла подповерхностного объекта. Если точки рассеяния разные, то имеет место отражение от ребра подповерхностного объекта (прямого или изогнутого) или другого его угла. Рассмотрение мгновенных значений векторов Пойнтинга, полученных антенными блоками 3-1 и 3-2, 4-1 и 4-2, 5-1 и 5-2 и т.д., позволит восстановить с дискретностью, определяемой конфигурацией антенной решетки, форму рассеивающего элемента объекта (в данном случае - ребра или комбинации ребер, а также углов в местах их пересечений). Если фронты, обнаруженные антенными блоками 2-1 и 2-2, свидетельствуют о плоском отражении, то это является подтверждением плоского характера поверхности подповерхностного объекта 4 в этой области.
Совместный анализ полученных результатов позволяет отобразить проекцию подповерхностного объекта на подстилающую поверхность.
Таким образом, совместный анализ мгновенных значений векторов Пойнтинга позволяет оценить и отобразить типовые формы подповерхностного объекта.
Во всех предшествующих пунктах формулы изобретения считалось, что свойства надповерхностной и подповерхностной сред одинаковы. По п.4 формулы изобретения оценивают свойства среды, в которой расположен объект исследования 4, что позволяет построить более точное его изображение.
Для решения этой задачи при приеме отраженных сигналов измеряют время их приема по отношению к зондирующему сигналу.
Обнаруживают отражения зондирующего сигнала, принадлежащие одному волновому фронту, обнаруживают «блестящую точку» W, фиг.9, в которой пересекаются N (N≥2) обращеных мгновенных значений векторов Пойнтинга, т.е. точку со сферическим (радиальным) фронтом рассеянного сигнала. Заметим, что точка W не принадлежит подповерхностному объекту, поскольку найдена без учета преломляющих свойств среды. Однако обнаружение такой точки может быть использовано для обнаружения мгновенных векторов Пойнтинга, принадлежащих сферическому фронту.
Вычисляют диэлектрические проницаемости (N-1) слоев среды, в которой находится подповерхностный объект. Рассмотрим возможность решения этой задачи для случая однородной подповерхностной среды, когда N=2, фиг.9. Для простоты рассмотрения ограничимся плоским случаем.
Пусть источник излучения 5 находится в точке А. Зондирующий импульс рассеивается в точке С и принимается антенными блоками 1-1 и 1-2, расположенными в точках E1 и Е2. Расстояния AE1=l1 и АЕ2=l2 между источником и приемниками, расположенными в точках E1 и Е2 соответственно, фиксированы. Времена распространения импульсов по путям ABCD1E1 и ABCD2E2 - τA и τB соответственно измерены и известны. Высота антенн над подстилающей поверхностью h1 также известна. Углы прихода рассеянных импульсов α21 и α22 известны, поскольку рассчитаны векторы Пойнтинга. Плоскость, в которой лежат излучающая и приемные антенны, а также точка рассеяния С, перпендикулярна плоскости раздела "воздух - подповерхностная среда". Скорость распространения волнового фронта в воздухе считается известной и равной с1, в среде - неизвестной с2.
Рассмотрим сначала путь ABCD1E1. Измеряемое время распространения импульса по этому пути состоит из следующих слагаемых:
τA=τ1+τ2+τ31+τ41.
Зная угол α21 в прямоугольном треугольнике D1E1G1 и высоту E1G1=h1, находим сторону D1E1=h1/cosα21 и, следовательно, время τ41=h1/(c1cosα21) и сторону D1G1=h1tgα21. Время распространения импульса по пути ABCD1E1:

Известно, что углы α1 и β1, углы α21 и β21 связаны друг с другом в соответствии с законом Снеллиуса
 ,
, 
Выразив косинусы через синусы, получим следующее уравнение:

В этом уравнении три неизвестных: α1, с2 и h2. Запишем второе уравнение
ABsinα1+BCsinβ1+CDsinβ21=AE1-F1E1,
или

Аналогичные уравнения могут быть выписаны для пути распространения ABCD2Е2. Окончательно можно получить систему из двух нелинейных уравнений с двумя неизвестными


Решив эту систему, получим выражение для неизвестных скорости распространения волнового фронта в среде с2 и глубину залегания точки рассеяния h2

где выбирается положительное значение c2 как имеющее физический смысл,

Здесь для удобства записи приняты следующие обозначения:
 N=l1-h1tgα21-l2+h1tgα22.
N=l1-h1tgα21-l2+h1tgα22.
Горизонтальное положение рассеивающей точки С определяется по одной из формул:

Относительная диэлектрическая проницаемость подповерхностной среды определяется соотношением

Аналогичным образом можно рассчитать диэлектрическую проницаемость подповерхностной среды для большего количества слоев. Для этого необходимо увеличивать количество приемных антенных блоков (по одному на каждый дополнительный слой), увеличивая тем самым количество независимых измерений, т.е. увеличивая количество независимых уравнений по мере увеличения количества неизвестных переменных. Здесь эти выкладки, а также выкладки для обобщенного пространственного случая не приводятся из-за их громоздкости.
По известным временам распространения зондирующих сигналов, диэлектрическим проницаемостям слоев среды и направлениям мгновенных векторов Пойнтинга можно вычислить реальное пространственное положение отражающих (рассеивающих) точек подповерхностного объекта 4. Совместный анализ мгновенных значений векторов Пойнтинга, выявление форм волновых фронтов, описанное выше, позволяет определить формы подповерхностного объекта и отобразить его пространственное изображение с учетом форм элементов и свойств среды.
По п.5 формулы изобретения описанные в п.п.1-4 действия выполняют в нескольких неподвижных относительно передающей зондирующей антенны 5 положениях основания 6 с установленными антенными блоками 1 с известными относительными координатами. Реализация данного способа заключается, например, в том, что антенные блоки 1-1, 1-2 и 1-3, фиг.2, 3 поворачивают вокруг зондирующей антенны 5 так, чтобы они последовательно занимали положения 2-1, 2-2, 2-3 и т.д., фиг.3. При этом число антенных блоков 1 и соответствующих каналов приема и обработки сокращается с 24 до 3. Техническая реализация такого вращения проблем не вызывает. Очевидно, что при этом время зондирования и обработки возрастает.
Совместный анализ мгновенных значений векторов Пойнтинга и форм элементов подповерхностного объекта, полученных во всех положениях, позволяет добиться того же результата, что и при использовании антенной решетки фиг.3.
Отображают изображение подповерхностного объекта с учетом его форм и положения, обнаруженных с разных сторон наблюдения.
Рассмотрим возможность практической реализации заявляемого способа.
На фиг.10 приведена схема устройства, реализующего заявляемый способ, с использованием одного антенного блока, где:
10. Компьютер.
11. Генератор СШП зондирующих сигналов.
12. Блок приема отраженных сигналов.
13. Коммутатор.
14. Устройство выборки и хранения.
15. Аналого-цифровой преобразователь.
16. Блок приема.
Антенный блок 1 содержит сосредоточенные, ортогонально расположенные электрическую 2 и магнитную 3 антенны. Каждая из антенн содержит 2-3 приемных антенны с общим их количеством в обоих антеннах не менее 5. Сосредоточенное расположение этих антенн может быть выполнено путем малогабаритного исполнения этих антенн или за счет перемещения антенн с приведением их в одно и то же положение при последовательных зондированиях. Антенные блоки 1 устанавливаются на общее основание 6 с зондирующей антенной 5. Антенные блоки 1, зондирующая антенна 5 и основание 6 устанавливаются так, чтобы все объекты поиска находились в ближней зоне антенн (см. выше).
Главной проблемой построения устройств, реализующих заявляемый способ построения изображения подповерхностного объекта, является выбор оптимального соотношения между числом антенных блоков, количеством устройств приема и обработки отраженных сигналов, а также сложностью и трудоемкостью алгоритмов обработки. В рассматриваемом варианте реализации заявляемого устройства предполагается:
- использование антенной решетки, содержащей два антенных блока 1;
- последовательный способ опроса каждого из элементов электрической и магнитной антенн в каждом антенном блоке 1;
- одновременный опрос двух антенных блоков 1.
Основным устройством, обеспечивающим синхронизацию, прием и обработку сигналов, является компьютер 10.
По управляющему сигналу от компьютера 10 генератор СШП сигналов 11 вырабатывает зондирующий сигнал, который излучается антенной 5, с шириной диаграммы направленности, обеспечивающей формирование фронта, который может быть принят всеми элементами антенной решетки. Излучение одинаковых зондирующих сигналов производится многократно, так, чтобы обеспечить возможность стробоскопического приема отраженных сигналов всеми элементами антенн, в том числе и последовательно, а также всеми антенными блоками, в том числе и последовательно, а также последовательно при различных положениях антенных блоков 1. Кроме стробоскопического приема, возможна реализация приема по принципу прямого сэмплирования. Последнее, однако, потребует наличия отдельного канала приема для каждого антенного элемента каждого антенного блока с быстродействующим приемником в каждом канале. Указанные варианты соответствуют различным схемам построения устройства.
Управляющий сигнал от компьютера 10 к коммутаторам 13 подключает одну электрическую и одну магнитную антенны к соответствующим входам устройств выборки и хранения 14. Подключенные антенные элементы принимают входные сигналы и подают их на входы устройств выборки и хранения 14. В качестве последних могут использоваться, например, быстродействующие сэмплеры, реализованные во входных цепях приемников прямого сэмплирования осциллографов Tektronix DPO 71254/71604/72004 (частота дискретизации - 50 ГГц), LeCroy WaveMaster 8620A/8600A (частота дискретизации - 20 ГГц), Agilent Infinium 81304В/81204B/81004B/80804B/80604B/80404B/80304B/80204B (частота дискретизации - 40 ГГц). Перечисленные осциллографы имеют в своем составе компьютер, работающий под управлением операционной системы Windows XP. В качестве более экономичного варианта может быть использовано серийно выпускаемое устройство выборки и хранения в корпусе микросхемы, например, AD781, AD783, AD9101 фирмы Analog Devices, или в виде специального модуля, как, например, Model 7040 фирмы Picosecond Pulse Labs. Перечисленные устройства выборки и хранения предназначены для применения в приемных устройствах, реализующих стробоскопический принцип приема сигналов. При этом с определенной частотой повторения излучаются одинаковые импульсные зондирующие сигналы, а стробоскопический приемник осуществляет в каждом сигнале выборку только одного отсчета, причем временное положение этого отсчета сдвигается на равные промежутки времени от сигнала к сигналу. Таким образом, последовательно производится выборка отсчетов с необходимой дискретностью по всей протяженности сигнала. Частота повторения зондирующих импульсов и дискретность отсчетов задаются компьютером 10. Эти времена выбираются исходя из длительности зондирующего импульса, необходимого количества накоплений сигнала для увеличения отношения сигнал/шум, необходимого темпа поиска, ограничений по тепловой мощности и быстродействию генератора, быстродействия устройства выборки и хранения, глубины зоны поиска, характеристик укрывающих объект поиска сред. Полученные отсчеты с относительно низкой (десятки килогерц - десятки мегагерц) частотой поступают на аналого-цифровые преобразователи 15, которые оцифровывают полученные результаты, подают их на входные порты компьютера 10, принимаются и сохраняются последним. Полученные отсчеты сравниваются с заранее выбранными порогами, что позволяет обнаружить отражения зондирующего сигнала от подповерхностного объекта, отличающиеся большей амплитудой. Аналогичные действия повторяют для всех элементов (2 и 3) антенного блока 1. Совокупность, фиг.10, двух коммутаторов 13, двух устройств выборки и хранения 14 и двух аналого-цифровых преобразователей 15 будем называть блоком приема 16. При выбранной схеме заявляемого устройства количество блоков приема 16 совпадает с количеством антенных блоков 1. Наиболее экономичным по аппаратурным затратам, но наиболее медленным является случай, когда одно устройство выборки и хранения 14 и один аналого-цифровой преобразователь 15 посредством коммутатора последовательно подключается ко всем элементам всех антенных блоков. Наиболее затратным по аппаратуре, но самым быстродействующим является вариант, использующий одно устройство выборки и хранения 14 и один аналого-цифровой преобразователь 15 на каждый элемент в каждом антенном блоке. В последнем варианте многократное зондирование необходимо лишь для обеспечения временного разрешения, т.е. вызвано ограниченностью быстродействия устройств выборки и хранения 14.
Остальные этапы обработки производятся в компьютере 10 по описанным выше алгоритмам.
Таким образом, заявляемый способ является практически реализуемым и позволяет повысить качество радиолокационного изображения подповерхностного объекта.
Литература
1. Патент: KR 20020036472, THREE DIMENSIONAL COLOR PORTABLE TYPE GROUND PENETRATING RADAR AND DETECTING METHOD.
2. Патент: RU 2282875, УСТРОЙСТВО ЗОНДИРОВАНИЯ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ.
3. Патент: RU 2248018, СПОСОБ ПОИСКА МИН СВЕРХШИРОКОПОЛОСНЫМ ГЕОРАДАРОМ.
4. Патент: RU 2105330, ГЕОФИЗИЧЕСКИЙ РАДИОЛОКАТОР.
5. Патент: FR 2626666, METHOD FOR MEASURING THE THICKNESS OF ROAD COVERING LAYERS USING PULSED RADAR.
6. Патент: RU 2143708, СПОСОБ ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ФОРМИРОВАНИЯ РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ.
7. Патент: US 2003132873, METHOD FOR OBTAINING UNDERGROUND IMAGERY USING A GROUND-PENETRATING RADAR.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДПОВЕРХНОСТНОГО ЗОНДИРОВАНИЯ | 2009 |
|
RU2393501C1 |
| СПОСОБ ПОИСКА МИН СВЕРХШИРОКОПОЛОСНЫМ ГЕОРАДАРОМ | 2004 |
|
RU2248018C1 |
| СПОСОБ ПОВЫШЕНИЯ РАЗРЕШАЮЩЕЙ СПОСОБНОСТИ РАДИОЛОКАЦИОННОГО СВЕРХШИРОКОПОЛОСНОГО ЗОНДИРОВАНИЯ | 2007 |
|
RU2348945C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2244322C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2490672C1 |
| СПОСОБ И СИСТЕМА РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМНЫХ НЕДР | 2009 |
|
RU2436130C2 |
| РАДАР ФОРМИРОВАНИЯ ПОДПОВЕРХНОСТНОГО ИЗОБРАЖЕНИЯ | 2008 |
|
RU2453864C2 |
| СПОСОБ ГЛУБИННОЙ ГЕОРАДИОЛОКАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2816128C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОНИЦАЕМОСТИ ПРЕГРАДЫ ДЛЯ ЗОНДИРУЮЩЕГО ИЗЛУЧЕНИЯ СВЕРХШИРОКОПОЛОСНОГО РАДАРА | 2012 |
|
RU2501032C1 |
| ЦЕНТРАЛЬНЫЙ ЭЛЕМЕНТ АНТЕННОЙ РЕШЕТКИ ГЕОРАДАРА | 2008 |
|
RU2430452C2 |




Заявляемый способ относится к георадарам, а именно радиолокационным системам, использующим сверхширокополосные сигналы (СШП), предназначенным для обнаружения и отображения подповерхностных объектов. Способ заключается в том, что в ближней зоне излучают СШП зондирующие сигналы, антенной решеткой принимают и обнаруживают сигналы, отраженные и рассеянные объектом, измеряют их электрические и магнитные компоненты, по которым вычисляют векторы Пойнтинга, вычисляют и отображают изображение подповерхностного объекта в виде проекции на подстилающую поверхность, оценивают типовые формы фронтов отраженных (рассеянных) сигналов и соответствующие формы подповерхностного объекта, вычисляют свойства подповерхностой среды, в том числе и многослойной, строят изображение объекта с учетом форм элементов подповерхностного объекта и свойств среды. Достигаемым техническим результатом изобретения является повышение точности построения изображения подповерхностного объекта с учетом его формы, глубины залегания и свойств среды. 4 з.п. ф-лы, 10 ил.
1. Способ построения изображения подповерхностного объекта, заключающийся в том, что неподвижным антенным блоком, состоящим из сосредоточенных магнитной и электрической антенн, причем каждая антенна содержит не менее двух приемных элементов, образующих ортогональный базис, с общим числом приемных элементов не менее пяти, принимают отражения зондирующего сигнала, отличающийся тем, что устанавливают антенную решетку, состоящую из нескольких описанных антенных блоков, закрепленных на общем основании с передающей зондирующей антенной и с известными относительными положениями антенных блоков, таким образом, чтобы предполагаемый объект исследования находился в их ближней зоне, многократно излучают одинаковые импульсные сверхширокополосные сигналы, измеряют высоту антенных блоков или фазовых центров антенн по отношению к подстилающей поверхности, принимают отражения зондирующего сигнала всеми антенными блоками, для каждого антенного блока по превышению заранее установленного порога обнаруживают отражения зондирующего сигнала от подповерхностного объекта, измеряют мгновенные амплитуды компонент векторов электрического  и магнитного
и магнитного  полей и вычисляют мгновенные значения векторов Пойнтинга в виде векторного произведения
полей и вычисляют мгновенные значения векторов Пойнтинга в виде векторного произведения  , определяют мгновенные векторы Пойнтинга
, определяют мгновенные векторы Пойнтинга  , направленные на подстилающую поверхность, совместно обрабатывают их, с учетом измеренной высоты антенных блоков или фазовых центорв антенн по отношению к подстилающей поверхности и известного относительного положения антенных блоков, для отображения изображения подповерхностного объекта.
, направленные на подстилающую поверхность, совместно обрабатывают их, с учетом измеренной высоты антенных блоков или фазовых центорв антенн по отношению к подстилающей поверхности и известного относительного положения антенных блоков, для отображения изображения подповерхностного объекта.
2. Способ по п.1, отличающийся тем, что дополнительно подстилающую поверхность разбивают на участки, при совместной обработке мгновенных значений векторов Пойнтинга  вычисляют точки их пересечения с подстилающей поверхностью, суммируют амплитуды мгновенных значений векторов Пойнтинга на каждом из указанных участков, а изображение подповерхностного объекта осуществляют в виде полутонового изображения как проекции на подстилающую поверхность.
вычисляют точки их пересечения с подстилающей поверхностью, суммируют амплитуды мгновенных значений векторов Пойнтинга на каждом из указанных участков, а изображение подповерхностного объекта осуществляют в виде полутонового изображения как проекции на подстилающую поверхность.
3. Способ по п.1, отличающийся тем, что дополнительно измеряют время приема отраженных сигналов по отношению к моменту излучения зондирующего сигнала, при совместной обработке мгновенных значений векторов Пойнтинга обнаруживают отражения зондирующего сигнала, принадлежащие одному волновому фронту, выявляют типовые формы волновых фронтов, определяют соответствующие формы элементов подповерхностного объекта, отображают изображение подповерхностного объекта в виде его проекции на подстилающую поверхность с учетом формы его элементов.
4. Способ по п.1, отличающийся тем, что дополнительно измеряют время приема отраженных сигналов по отношению к моменту излучения зондирующего сигнала, при совместной обработке мгновенных значений векторов Пойнтинга обнаруживают отражения зондирующего сигнала, принадлежащие одному волновому фронту, обнаруживают «блестящую точку», в которой пересекаются N (N≥2) обращеных мгновенных значений векторов Пойнтинга , вычисляют диэлектрические проницаемости (N-1) слоев среды, в которой находится подповерхностный объект, вычисляют пространственное положение точек подповерхностного объекта с учетом диэлектрических проницаемостей слоев среды, выявляют типовые формы волновых фронтов, определяют соответствующие формы элементов подповерхностного объекта и отображают пространственное изображение подповерхностного объекта с учетом форм его элементов и свойств среды.
5. Способ по п.1, или 2, или 3, или 4, отличающийся тем, что описанные действия выполняют в нескольких неподвижных относительно передающей зондирующей антенны положениях основания с установленными антенными блоками с известными относительными координатами, совместно анализируют мгновенные значения векторов Пойнтинга и формы элементов подповерхностного объекта, полученные во всех положениях, отображают изображение подповерхностного объекта с учетом его форм и положения, определенных с разных сторон наблюдения.
| US 2003132873 A1, 17.07.2003 | |||
| СПОСОБ ОБРАБОТКИ ИЗОБРАЖЕНИЯ ОБЪЕКТА | 1995 |
|
RU2116671C1 |
| RU 2003135820 A, 27.05.2005 | |||
| RU 2006107366 A, 10.10.2007 | |||
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА ИЗОБРАЖЕНИЯ | 1990 |
|
RU2012154C1 |
| Способ регулирования волновой энергетической установки | 1979 |
|
SU1252534A1 |
| US 6374187 B1, 16.04.2002 | |||
| WO 2005045466 A, 19.05.2005 | |||
| JP 2007163271 A, 28.06.2007. | |||

