Заявляемый способ подповерхностного зондирования относится к георадарам, а именно радиолокационным системам, использующим сверхширокополосные (СШП) сигналы, предназначенным для обнаружения и построения изображения подповерхностных объектов. Способ может быть использован в военном деле, строительстве, археологии и других областях для обнаружения и построения изображения различных, в том числе и неметаллических предметов.
Известен способ подповерхностного зондирования [1], заключающийся в радиолокационном исследовании подповерхностных объектов антенной решеткой, содержащей множество антенн и, соответственно, приемников, передатчиков и другой аппаратуры обработки.
Недостатком таких способов являются большие аппаратные затраты, а следовательно, стоимость, вес, габариты устройств, реализующих этот способ. Помимо этого такие устройства представляют собой, по сути, несколько отдельных не связанных друг с другом георадаров, каждый из которых построен по бистатической схеме, не позволяющей определять направление прихода сигналов от исследуемого объекта и других объектов, создающих мешающие отражения. Это значительно затрудняет, а часто делает невозможным построение изображения исследуемого объекта.
Известен способ подповерхностного зондирования [2], заключающийся в измерении по отдельности электрических и магнитных компонент электромагнитного поля. Реализация данного способа предполагает сосредоточенное размещение 2 электрических и 3 магнитных ортогональных антенн. Компоненты электромагнитного поля позволяют вычислить вектор Пойтинга и тем самым определить направление на излучатель (отражатель).
Недостатком данного способа является сложность технической реализации ортогональных сосредоточенных антенн как по конструктивным соображениям, так и из-за взаимовлияния антенн. Кроме того, для получения изображения подповерхностного объекта требуется перемещать антенны, измерять координаты текущего пространственного положения, что является непростой задачей.
Известен способ подповерхностного зондирования [3], заключающийся в размещении ограниченного числа приемных антенн на окружности радиуса R и вращении их вокруг ее центра, приеме этими антеннами зондирующих сигналов, отраженных от подповерхностных объектов, измерении текущего углового положения антенн с последующей обработкой полученных результатов. Таким образом, данный способ позволяет организовать синтез апертуры с заранее выбранным разрешением, а расположение антенн на окружности позволяет достаточно просто определить их текущие координаты. Кроме того, этот способ предполагает возможность использования не только радиочастотного диапазона, но и ультразвуковых и иных приемо-передающих элементов.
Недостатками данного способа данного способа являются низкая информативность измерений и сложность технической реализации. Низкая информативность обусловлена тем, что в большинстве измерительных систем, построенных на основе излучения зондирующих и приеме отраженных от объекта исследования сигналов, диаграммы направленности источников и приемников имеют определенную ширину, как правило, не менее 60°. При этом оказывается сложно обнаружить отраженный сигнал, поскольку его амплитуда зависит от углов излучения, отражения и приема, поглощающих свойств среды и других факторов. Еще труднее определить точное направление на отражающий объект. Иногда эти задачи удается решить в дальней зоне объекта исследования. Сложность технической реализации обусловлена, во-первых, тем, что в способе [3] предполагается вращение антенн вокруг собственной оси в направлении, противоположном вращению всего антенного комплекса, что порождает сложность механической конструкции. Кроме того, использование в качестве излучающих одной или нескольких антенн, расположенных на окружности вращения, порождает сложность вычислений.
Задачей, решаемой заявляемым способом, является повышение информативности измерений при использовании радиолокационных методов и сверхширокополосных сигналов, что, в конечном счете, позволит получить правдоподобное изображение подповерхностного объекта.
Для решения указанных задач по п.1 формулы изобретения в способе подповерхностного зондирования, заключающемся в том, что приемные антенны георадара устанавливают по окружности радиуса R и вращают вокруг ее центра, принимают приемными антеннами георадара зондирующие сигналы, отраженные от подповерхностных объектов, измеряют текущее угловое положение антенн, в центре окружности вращения приемных антенн устанавливают неподвижную передающую антенну, с диаграммой направленности, круговой и симметричной относительно оси вращения приемных антенн, излучающую зондирующие сигналы в направлении подповерхностного объекта, в качестве приемных антенн используют магнитные и электрические антенны, образующие ортогональный базис, при этом в георадар устанавливают не менее пяти приемных антенн, в том числе не менее двух электрических и не менее двух магнитных, в качестве зондирующих сигналов используют одинаковые повторяющиеся одиночные импульсные сверхширокополосные сигналы, измеряют высоты антенн над подстилающей поверхностью, выбирают на окружности вращения точки регистрации, в окрестностях каждой из них каждой приемной антенной георадара обнаруживают сигналы, отраженные от подповерхностного объекта, измеряют их временные и амплитудные параметры, вычисляют мгновенное значение вектора Пойнтинга и определяют положение отражающей точки подповерхностного объекта, по совокупности отражающих точек подповерхностного объекта, полученных от всех точек регистрации принимаемых сигналов, строят изображение подповерхностного объекта.
По п.2 формулы изобретения изменяют радиус окружности вращения приемных антенн, повторяют измерения, указанные в п.1, выбирают наиболее информативный радиус и строят изображение подповерхностного объекта по данным, полученным на этом радиусе.
По п.3 изменяют радиус окружности вращения приемных антенн, повторяют измерения, указанные в п.1, и строят изображение подповерхностного объекта по данным, полученным по всей совокупности радиусов.
Существенными отличиями заявляемого способа по п.1 формулы изобретения от прототипа являются:
Устанавливают в центре окружности вращения приемных антенн неподвижную передающую антенну с диаграммой направленности, круговой и симметричной относительно оси вращения приемных антенн, излучающую зондирующие сигналы в направлении подповерхностного объекта. Такая антенна создает одинаковые зондирующие сигналы во всех направлениях, так что условия приема одинаковы для всех приемных антенн.
В прототипе, по крайней мере, одна из антенн, расположенных на окружности, является излучающей. Такой способ «подсвечивания» подповерхностного объекта асимметричен, что вызывает существенные проблемы при вычислении геометрии распространения сигналов. Более того, сохранение взаимной ориентации (поляризации) приемных антенн требует их вращения в направлении, противоположном вращению антенн по окружности, что является серьезной технической проблемой.
Использование в качестве приемных магнитных и электрических антенн, образующих ортогональный базис, позволяет каждой антенной принимать только одну из ортогональных составляющих электрического или магнитного поля, что позволяет решить задачу обнаружения направления на источник излучения.
Установка не менее пяти приемных антенн, в том числе не менее двух электрических и не менее двух магнитных, позволяет создать ортогональный базис из шести компонент электрического и магнитного полей (пять из которых - независимы, а шестая - однозначно определяется первыми пятью компонентами и условием ортогональности электрического и магнитного векторов электромагнитного поля излучения). Суммарные вектора напряженностей электрического и магнитного полей ортогональны, поэтому пяти компонент достаточно, чтобы вычислить недостающую.
В прототипе тип, количество и характеристики приемных антенн не оговариваются.
Использование в качестве зондирующих сигналов одинаковых повторяющихся одиночных импульсных СШП сигналов позволяет решать проблему обнаружения и оценки параметров отраженных сигналов во временной области, с учетом скорости распространения в воздухе и подповерхностной среде.
Измерение высоты антенн над подстилающей поверхностью позволяет оценить время распространения зондирующих сигналов в надповерхностном пространстве.
Выбор на окружности вращения точек регистрации позволяет выбрать желаемое разрешение, т.е. количество отражающих точек подповерхностного объекта, которые стремятся обнаружить.
В окрестности каждой из точек регистрации каждой приемной антенной георадара обнаруживают сигналы, отраженные от подповерхностного объекта, измеряют их временные и амплитудные параметры, вычисляют мгновенное значение вектора Пойтинга и определяют положение отражающей точки подповерхностного объекта. Описанные действия позволяют обнаружить множество отражающих точек подповерхностного объекта в соответствии с количеством точек регистрации.
Строят изображение подповерхностного объекта по обнаруженному множеству отражающих точек подповерхностного объекта.
В прототипе вопросы формирования зондирующих сигналов и их обработке не рассматриваются.
Существенными отличиями заявляемого способа по п.2 формулы изобретения от прототипа является то, что изменяют радиус окружности вращения, повторяют измерения, выбирают наиболее информативный радиус и строят изображение подповерхностного объекта по данным, полученным на этом радиусе. Такое решение позволяет подобрать диаметр окружности вращения антенн так, чтобы, например, отклики от подповерхностного объекта были наибольшими по амплитуде или хорошо складывались в изображение подповерхностного объекта в виде совокупности точек, расположенных по его периметру, и при этом не накладывались бы друг на друга.
Существенными отличиями заявляемого способа по п.3 формулы изобретения от прототипа является то, что изменяют радиус окружности вращения, повторяют измерения и строят изображение подповерхностного объекта по данным, полученным по всей совокупности радиусов вращения. Такой подход позволяет использовать всю совокупность точек, обнаруженных в результате зондирования для построения более подробного изображения объекта.
Заявляемый способ иллюстрируют следующие графические материалы:
Фиг.1 - схема антенного блока георадара, где:
1 - передающая антенна;
2 - вращающаяся несущая платформа;
3 - штанги;
4 - ортогональные приемные элементы магнитной компоненты поля;
5 - ортогональные приемные элементы электрической компоненты поля;
6 - приемники;
7 - траектории перемещения приемных элементов при различной длине штанг.
Фиг.2 - структурная схема устройства, реализующего заявляемый способ, где:
8 - компьютерный блок;
9 - генератор СШП сигналов;
10 - дисплей;
11 - измеритель текущего углового положения антенн;
12 - измеритель высоты антенного блока над подстилающей поверхностью.
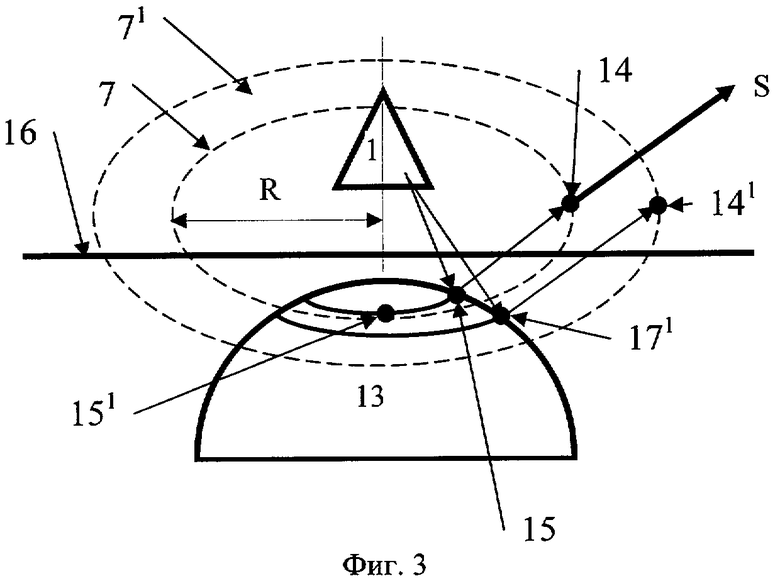
Фиг.3 - схема измерений, где:
13 - подповерхностный объект
14 - точки регистрации;
15 - отражающие точки подповерхностного объекта;
16 - граница раздела сред;
17 - отражающие точки подповерхностного объекта.
Рассмотрим техническую реализацию заявляемого антенного блока при условии, что он содержит 3 ортогональных магнитных и 3 ортогональных электрических антенны, фиг.1.
Передающая антенна 1 предназначена для излучения зондирующих СШП сигналов. Диаграмма ее направленности круговая и симметрична относительно оси антенны. Антенна 1 может быть выполнена в виде рупорной конусной антенны с центральным проводником или без него.
Вращающаяся несущая платформа 2 предназначена для крепления радиальных штанг 3, имеющих одинаковую длину. На концах штанг 3 установлены приемные магнитные 4 или электрические 5 антенны. Платформа имеет возможность вращаться вокруг центра, при этом указанные антенны перемещаются по окружности 7 радиуса R. По п.2 и 3 формулы изобретения штанги 3 являются телескопическими и могут синхронно изменять свою длину, делая радиус R окружности 7 переменным. Способ изменения длины штанг может быть различным - гидравлическим, электромеханическим и т.п.
Магнитные антенны 4 предназначены для приема ортогональных компонент магнитного поля сигналов, отраженных от подповерхностного объекта, и могут быть выполнены в виде взаимно ортогональных петель.
Электрические антенны 5 предназначены для приема ортогональных компонент электрического поля сигналов, отраженных от подповерхностного объекта, и могут быть выполнены в виде взаимно ортогональных вибраторов.
Приемники 6 обеспечивают прием, усиление и аналого-цифровое преобразование сигналов, отраженных от подповерхностного объекта.
Компьютерный блок 8 предназначен для управления работой всех частей георадара, приема, обработки и отображения результатов зондирования и снабжен соответствующими интерфейсами.
Генератор 9 предназначен для формирования СШП сигналов по команде от компьютерного блока 8.
Дисплей 10 предназначен для отображения результатов измерений.
Измеритель текущего углового положения антенн 11 предназначен для определения текущего углового положения антенн 5 и 6.
Измеритель высоты антенного блока над подстилающей поверхностью 12 предназначен для оценки указанной высоты с целью определения глубины залегания подповерхностного объекта. Измеритель 12 может быть реализован как в виде отдельного радиолокационного модуля, так и в виде блока обработки, использующего сигналы, отраженные от поверхности и принятые антеннами 4 и 5.
Рассмотрим работу устройства, фиг.2, реализующего заявляемый способ по п.1 формулы изобретения, считая подповерхностный объект полусферой 13, фиг.3.
Три ортогональных электрических 5 и три ортогональных магнитных 4 антенны устанавливают на концах штанг 3, закрепленных на вращающейся несущей платформе 2, так, что все антенны находятся на расстоянии R (например, 0,25 м) от центра вращения, фиг.1. Приемные антенны 4 и 5 располагают по окружности вращения равномерно так, чтобы механический дисбаланс был минимальным. Скорость вращения антенн 4 и 5 выбирают относительно невысокой, например, 1 оборот в секунду. В центре платформы 2 устанавливают излучающую антенну 1. Непрерывно измеряют текущее угловое положение антенн 4 и 5 и их высоту над подстилающей поверхностью 16.
По периодическому запускающему сигналу от компьютерного блока 8 излучают антенной 1 импульсные СШП зондирующие сигналы. Частота зондирования выбирается так, чтобы, во-первых, до прихода следующего зондирующего импульса успеть принять антеннами 4 и 5 и обработать в компьютерном блоке 8 сигналы, отраженные от подповерхностного объекта, во-вторых, чтобы за время зондирования антенны 4 и 5 переместились на незначительное расстояние r. Например, при реализации стробоскопического способа зондирования при количестве точек, равном 512, и частоте повторения зондирующих импульсов 1 МГц величина r=0,8·10-3 м, что вполне приемлемо при линейных размерах антенн 4 и 5 порядка 1 см.
Выбирают на окружности вращения 7 точку регистрации 14, фиг.3. В моменты прохождения точки регистрации 14 приемными антеннами 4 и 5 принимают и компьютерным блоком 8 обнаруживают по превышению заранее установленного порога сигналы, отраженные от подповерхностного объекта 13. В момент обнаружения отраженного сигнала измеряют мгновенные амплитуды компонент векторов электрического Ex, Ey, Ez и магнитного Hx, Ну, Hz полей, поступившие на соответствующие приемные антенны 4 и 5, а также время прихода отраженных сигналов по отношению к зондирующему, и строят векторы электрического и магнитного полей:  и
и  . Заметим, что вектора
. Заметим, что вектора  и
и  теоретически ортогональны. Для каждой точки регистрации вычисляют мгновенное значение вектора Пойнтинга в виде векторного произведения
теоретически ортогональны. Для каждой точки регистрации вычисляют мгновенное значение вектора Пойнтинга в виде векторного произведения  =×, фиг.3, при этом обращенные мгновенные векторы Пойнтинга
=×, фиг.3, при этом обращенные мгновенные векторы Пойнтинга  направлены на источник отраженного излучения. По известной высоте антенн над подстилающей поверхностью и времени распространения зондирующего сигнала компьютерном блоке 8 рассчитывают (или оценивают) пространственное положение точки отражения 15. В известном [3] способе такая информация считается достаточной, чтобы построить изображение подповерхностного объекта.
направлены на источник отраженного излучения. По известной высоте антенн над подстилающей поверхностью и времени распространения зондирующего сигнала компьютерном блоке 8 рассчитывают (или оценивают) пространственное положение точки отражения 15. В известном [3] способе такая информация считается достаточной, чтобы построить изображение подповерхностного объекта.
Если выбрать несколько точек регистрации 14 на окружности вращения 7, то найденная совокупность точек отражения подповерхностного объекта 15, 151… позволит построить некоторый срез подповерхностного объекта 13. Отметим, что не для всех точек регистрации 14 удается найти положение точек отражения 15 из-за влияния мешающих отражений от других объектов, взаимовлияния элементов антенной решетки, свойств подповерхностной среды и других факторов. Вычисленное в компьютерном блоке 8 положение точек отражения 15 отображается на дисплее 10.
По п.2 формулы изобретения изменяют радиус окружности вращения 7, например на 71 используя телескопические штанги, и повторяют описанные действия. В результате действия указанных выше мешающих факторов, геометрических свойств подповерхностного объекта и других причин одна из окружностей вращения 7 может оказаться наиболее информативной, а результаты построения изображения - более наглядными, т.е. произойдет некоторая «фокусировка» изображения.
По п.3 формулы изобретения строится пространственное изображение объекта по результатам зондирования с разными радиусами окружности вращения.
Таким образом, заявляемый способ может быть реализован и обеспечивает получение изображения подповерхностного объекта.
Источники информации:
1. Патент WO 0022455.
2. Патент US 2003132873.
3. Патент US 2002105469.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСТРОЕНИЯ ИЗОБРАЖЕНИЯ ПОДПОВЕРХНОСТНОГО ОБЪЕКТА | 2008 |
|
RU2401439C2 |
| СПОСОБ ПОИСКА МИН СВЕРХШИРОКОПОЛОСНЫМ ГЕОРАДАРОМ | 2004 |
|
RU2248018C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2244322C1 |
| ЦЕНТРАЛЬНЫЙ ЭЛЕМЕНТ АНТЕННОЙ РЕШЕТКИ ГЕОРАДАРА | 2008 |
|
RU2430452C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ "МЕТАРАДАР" И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2263934C1 |
| СПОСОБ ГЕОРАДИОЛОКАЦИИ МНОГОЛЕТНЕМЕРЗЛЫХ ПОРОД | 2011 |
|
RU2490671C2 |
| ГЕОРАДАРНЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ВЛАЖНОСТИ, ЗАГРЯЗНЕННОСТИ И ТОЛЩИНЫ СЛОЕВ ЖЕЛЕЗНОДОРОЖНОЙ И АВТОДОРОЖНОЙ НАСЫПИ С ИСПОЛЬЗОВАНИЕМ ОТРАЖАТЕЛЬНОГО ГЕОТЕКСТИЛЯ | 2014 |
|
RU2577624C1 |
| СПОСОБ И СИСТЕМА РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ЗЕМНЫХ НЕДР | 2009 |
|
RU2436130C2 |
| УСТРОЙСТВО ДЛЯ РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ | 1994 |
|
RU2080622C1 |
| Способ обнаружения границы локального подземного торфяного пожара и робот для проведения разведки подземных торфяных пожаров | 2016 |
|
RU2625602C1 |

Заявляемый способ относится к радиолокационным системам, использующим сверхширокополосные (СШП) сигналы, предназначенным для обнаружения и построения изображения подповерхностных объектов. Согласно заявляемому способу осуществляется радиолокационное зондирование СШП сигналами подповерхностных объектов центральной излучающей антенной и прием отраженных сигналов ортогональными электрическими и магнитными приемными антеннами, расположенными на окружности вращения. Измерение текущего положения антенн, их высоты над подстилающей поверхностью и компонент электромагнитного поля позволяет определить вектор Пойтинга во множестве точек окружности вращения и вычислить положение отражающих точек подповерхностного объекта, по которым строится его изображение. Изменение радиуса вращения приемных антенн позволяет выбрать наиболее информативное положение антенн и построить пространственное изображение подповерхностного объекта по всей совокупности радиолокационных данных. Достигаемым техническим результатом изобретения является повышение информативности производимых измерений. 2 з.п. ф-лы, 3 ил.
1. Способ подповерхностного зондирования, заключающийся в том, что приемные антенны георадара устанавливают по окружности радиуса R и вращают вокруг ее центра, принимают приемными антеннами георадара зондирующие сигналы, отраженные от подповерхностных объектов, измеряют текущее угловое положение антенн, отличающийся тем, что в центре окружности вращения приемных антенн устанавливают неподвижную передающую антенну, с диаграммой направленности, круговой и симметричной относительно оси вращения приемных антенн, излучающую зондирующие сигналы в направлении подповерхностного объекта, в качестве приемных антенн используют магнитные и электрические антенны, образующие ортогональный базис, при этом в георадар устанавливают не менее пяти приемных антенн, в том числе не менее двух электрических и не менее двух магнитных, в качестве зондирующих сигналов используют одинаковые повторяющиеся одиночные импульсные сверхширокополосные сигналы, измеряют высоты антенн над подстилающей поверхностью, выбирают на окружности вращения точки регистрации, в окрестностях каждой из них каждой приемной антенной георадара обнаруживают сигналы, отраженные от подповерхностного объекта, измеряют их временные и амплитудные параметры, вычисляют мгновенное значение вектора Пойнтинга и определяют положение отражающей точки подповерхностного объекта, по совокупности отражающих точек подповерхностного объекта, полученных от всех точек регистрации принимаемых сигналов, строят изображение подповерхностного объекта.
2. Способ по п.1, отличающийся тем, что изменяют радиус окружности вращения приемных антенн, повторяют измерения, выбирают наиболее информативный радиус и строят изображение подповерхностного объекта по данным, полученным на этом радиусе.
3. Способ по п.1, отличающийся тем, что изменяют радиус окружности вращения приемных антенн, повторяют измерения и строят изображение подповерхностного объекта по данным, полученным по всей совокупности радиусов.
| US 2002105469 A1, 08.08.2002 | |||
| СПОСОБ ПОВЫШЕНИЯ РАДИОЛОКАЦИОННОГО РАЗРЕШЕНИЯ, СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ И СПОСОБ ДИСТАНЦИОННОГО ВЫЯВЛЕНИЯ СИСТЕМОЙ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ | 2004 |
|
RU2265866C1 |
| СПОСОБ И УСТРОЙСТВО ПОДПОВЕРХНОСТНОГО РАДИОЛОКАЦИОННОГО ЗОНДИРОВАНИЯ | 2005 |
|
RU2303279C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОКАЗАНИЙ К ХИРУРГИЧЕСКОМУ ЛЕЧЕНИЮ У БОЛЬНЫХ ИБС, ПЕРЕНЕСШИХ ИНФАРКТ МИОКАРДА | 2004 |
|
RU2269934C1 |
| US 6969844 В2, 29.11.2005 | |||
| US 2006012525 A1, 19.01.2006 | |||
| EA 200702257 A2, 28.02.2008 | |||
| CN 1959432 A, 09.05.2007. | |||

