Изобретение относится к области автоматики и вычислительной техники и может быть использовано в качестве индикаторного устройства для обнаружения источников лазерного излучения (ЛИ) с последующим противодействием их приемным устройствам.
Особую значимость эти вопросы приобретают при защите боевой техники, оснащенной оптоэлектронной аппаратурой, которая демаскирует себя в случае активного использования для ее обнаружения источников ЛИ.
Появление лазерных детекторов обнаружения оптических приборов (прицелы, бинокли, приборы ночного видения и т.п.) диктует необходимость разработки средств противодействия.
Известны лазерные детекторы, в частности SLD 400 (www.cilas.com), которые используются для обнаружения оптики.
Наиболее близким техническим решением, отвечающим требованиям обнаружения и управления, является устройство для обнаружения оптоэлектронных объектов (патент №2129288 от 20.04.99 г. по заявке №97115874 от 17.09.97 г.), содержащее лазерную систему, в состав которой входят частотно-импульсный лазер (ЧИЛ) с объективом и фотоприемное устройство (ФУ) с объективом, закрепленные на вращающихся вокруг вертикальной оси платформах с возможностью колебательно-вращательного движения ЧИЛ.
Цель изобретения - обнаружение источников ЛИ и последующее подавление ФУ системы обнаружения оптоэлектронных объектов.
Поставленная цель достигается тем, что в устройство для обнаружения оптоэлектронных объектов, содержащее частотно-импульсный лазер с объективом, закрепленный на вращающихся вокруг вертикальной оси платформах с возможностью колебательно-вращательного движения ЧИЛ, введены блок обнаружения, состоящий из двух датчиков обнаружения, блок управления, состоящий из k-триггеров первого и второго датчиков обнаружения, первого и второго элементов ИЛИ, входы которых соединены с выходами k-триггеров первого и второго датчиков обнаружения, а выходы - с входами соответственно первого и второго элементов НЕ; k элементов И первого и второго датчиков обнаружения, выходы которых соединены соответственно с первыми входами k-триггеров первого и второго датчиков обнаружения, а первые входы - с k-выходами первого и второго датчиков обнаружения, первого и второго элементов НЕ, выходы которых соединены соответственно со вторыми входами k-элементов И первого и второго датчиков обнаружения; первый и второй блоки кодирования, первый вход которых соединен с выходами k-триггеров первого и второго датчиков обнаружения; задающий генератор, выход которого соединен с вторыми входами блоков кодирования; первого и второго постоянных запоминающих устройств (ПЗУ), входы которых соединены с выходами соответствующих блоков кодирования; первого арифметическо-логического устройства (АЛУ), первый вход которого соединен с выходом второго ПЗУ, а второй вход - с выходом первого ПЗУ; второе АЛУ, первый вход которого соединен с выходом первого АЛУ, второй вход - с выходом первого ПЗУ, а второй выход - со вторыми входами k-триггеров первого и второго датчиков обнаружения; блок вычисления высоты источника лазерного излучения, первый вход которого соединен с выходом первого блока кодирования, второй вход - с выходом первого ПЗУ, третий вход - с первым выходом второго АЛУ; блок ввода исходных данных, второй и третий выходы которого соединены соответственно с четвертым и пятым входами блока вычисления высоты источника лазерного излучения; блок вычисления угла места, первый вход которого соединен с первым выходом блока ввода исходных данных, второй вход - с выходом первого АЛУ, третий вход - с первым выходом второго АЛУ, четвертый вход - с выходом блока вычисления высоты источника лазерного излучения, а выход является первым выходом устройства; блок вычисления азимута, первый вход которого соединен с первым выходом блока ввода исходных данных, второй вход - с выходом первого АЛУ, третий вход - с первым выходом второго АЛУ, а выход является вторым выходом устройства, при этом первый и второй выходы устройства подключены к вращающимся вокруг вертикальной оси платформам с возможностью колебательно-вращательного движения ЧИЛ, причем первое АЛУ производит вычисления по формуле

где  - углы, под которыми обнаруживается источник лазерного излучения датчиками блока обнаружения I;
- углы, под которыми обнаруживается источник лазерного излучения датчиками блока обнаружения I;
К - число элементов в датчиках 1 и 2;
l - расстояние между датчиками обнаружения, которое поступает с блока ввода исходных данных.
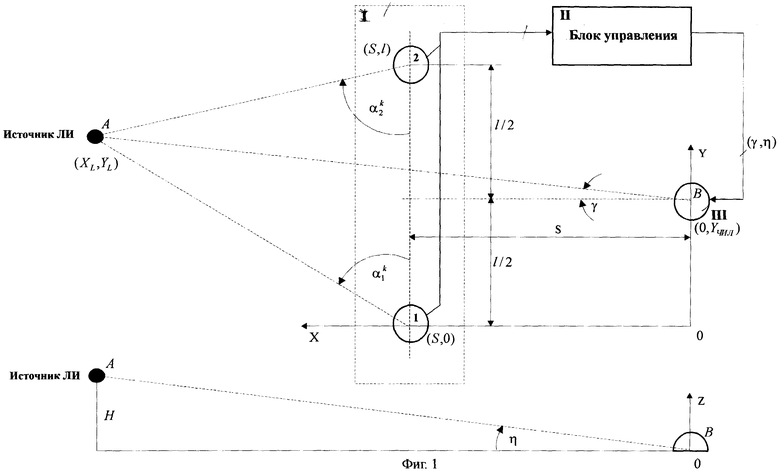
На фиг.1 представлена блок-схема предлагаемого устройства, где в местной системе координат показаны источник лазерного излучения (точка А), блок обнаружения I, состоящий из двух датчиков обнаружения 1, 2, блок управления II, вращающаяся платформа с ЧИЛ III.
На фиг.2 даны пояснения по определению координат источника лазерного излучения, а на фиг.3 показаны угловые координаты К-го элемента датчика обнаружения.
На фиг.4 представлена схема блока управления, в состав которого входят два устройства обработки сигналов с 1 и 2 датчиков обнаружения, содержащие элементы И, ИЛИ, НЕ, триггеры, блоки кодирования и ПЗУ; задающий генератор (ЗГ), блок вычисления высоты источника лазерного излучения, первое и второе арифметическо-логические устройства (АЛУ), блок ввода исходных данных, блок вычисления азимута и блок вычисления угла места.
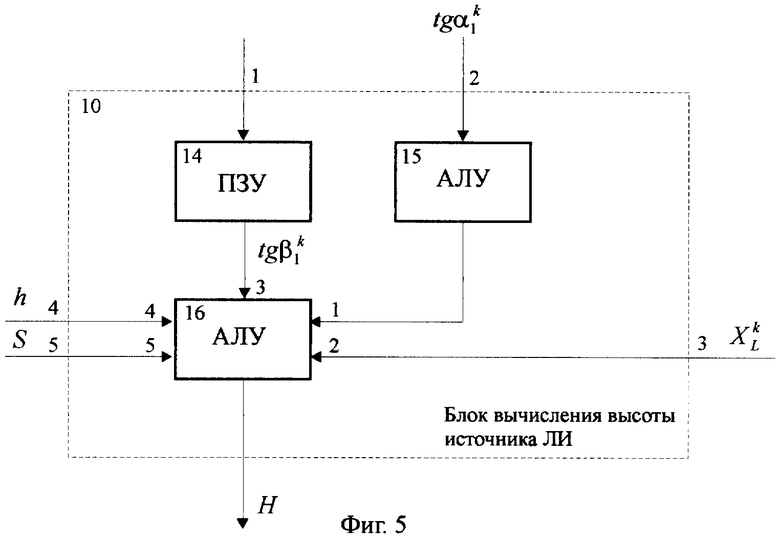
На фиг.5 показана схема вычисления высоты в блоке вычисления высоты источника лазерного излучения. В состав данного блока входят ПЗУ и два АЛУ.
На фиг.6 показана реализация блока вычисления азимута, а на фиг.7 - блока вычисления угла места.
Устройство включает блок обнаружения I, управляемый ЧИЛ III, блок управления II, содержащий 2k-элементов И 1, 2k-триггеров 2, первый и второй элементы НЕ 4, первый и второй элементы ИЛИ 3, задающий генератор 5, первый и второй блоки кодирования 6, первый и второй постоянные запоминающие устройства (ПЗУ) 8, арифметическо-логические устройства (АЛУ) 7, 9, блок вычисления высоты источника лазерного излучения 10, блок ввода исходных данных 11, блок вычисления азимута 12, блок вычисления угла места 13.
Сравнение с прототипом показывает, что заявляемое устройство отличается наличием новых блоков и их связями между собой. Таким образом, заявляемое устройство соответствует критерию “новизна”.
Сравнение заявляемого решения с другими техническими решениями показывает, что перечисленные элементы, используемые в блоках, являются известными, однако их введение в указанной связи с остальными элементами приводит к новым возможностям изделия в целом. Это подтверждает соответствие технического решения критерию “существенные отличия”.
Устройство работает следующим образом.
В системе координат XOY (фиг.1) на расстоянии S от управляемого ЧИЛ III устанавливается блок обнаружения I, состоящий из двух датчиков обнаружения 1 и 2.
Текущие координаты  ,
,  источника ЛИ могут быть определены по формуле
источника ЛИ могут быть определены по формуле

где l - расстояние между датчиками обнаружения;
 - углы, под которыми обнаруживается источник лазерного излучения датчиками блока обнаружения I;
- углы, под которыми обнаруживается источник лазерного излучения датчиками блока обнаружения I;
К - число элементов в датчиках 1 и 2.
Из геометрического построения (фиг.1, 2) находим возможную высоту нахождения источника лазерного излучения (например, нахождение на здании, в горах и т.п.):

где h - высота установки датчиков обнаружения;
S - расстояние между блоком обнаружения I и управляемым ЧИЛ III;
 - угол, определяемый положением k-го элемента датчика, в поле зрения которого находится источник лазерного излучения.
- угол, определяемый положением k-го элемента датчика, в поле зрения которого находится источник лазерного излучения.
Это, в свою очередь, накладывает ограничения на конструкцию этих датчиков, в качестве которых могут использоваться элементы пассивной локации, например, ИК-датчики.
Тогда конструктивно каждый из датчиков будет состоять из набора независимых k элементов, расположенных в заданном порядке и определяющих углы  ,
, 
 (фиг.3).
(фиг.3).
Другим примером построения датчиков может быть головка самонаведения, используемая в ЗРК “Стрела-3” [1], принцип действия которой также состоит в определении углов между главной осью ИК-головки и целью.
Для вычисления азимута γ и угла места η разворота управляемого ЧИЛ III в заданной системе координат определим ряд параметров
откуда

Вычисление параметров  ,
,  , γ, η производится в блоке управления II, куда поступают данные датчиков обнаружения.
, γ, η производится в блоке управления II, куда поступают данные датчиков обнаружения.
Работа блока управления II (фиг.4)
Один из k-сигналов первого и второго датчиков блока обнаружения I поступает на первые входы k-элементов И 1. На вторые входы этих элементов поступают сигналы разрешения с элементов НЕ 4. При этом на выходе элементов И 1 в зависимости от номера сигнала на его входе появится сигнал, который переключит один из k-триггеров 2 в другое устойчивое состояние. При этом через первый и второй элементы ИЛИ 3 поступит сигнал на вход первого и второго элементов НЕ 4 и тем самым будет запрещено дальнейшее поступление информации от датчиков блока обнаружения I.
Сигнал с k-го триггера 2 поступает на первые входы блоков кодирования 6. На вторые входы данных блоков поступает тактовая частота задающего генератора 5. В блоках кодирования 6 в зависимости от номера k вырабатывается адрес считывания информации с ПЗУ 8. При этом в ПЗУ 8 записаны согласно каждого k-го номера элемента датчика значения тангенсов углов  .
.
В первом АЛУ 7 производится вычисление величины  , а во втором АЛУ 9 - величины
, а во втором АЛУ 9 - величины  (выражение 1). Со второго выхода АЛУ 9 (сигнал переноса) вырабатывается сигнал сброса триггеров 2, обеспечивая тем самым возможность считывания информации с датчиков блока обнаружения I.
(выражение 1). Со второго выхода АЛУ 9 (сигнал переноса) вырабатывается сигнал сброса триггеров 2, обеспечивая тем самым возможность считывания информации с датчиков блока обнаружения I.
Работа блока 10 вычисления высоты источника лазерного излучения (фиг.5)
Сигнал с выхода первого блока кодирования 6 поступает на первый вход блока 10, соединенного со входом ПЗУ 14, где хранятся значения тангенсов углов  (см. фиг.2, 3). На второй вход данного блока поступают значения тангенсов углов
(см. фиг.2, 3). На второй вход данного блока поступают значения тангенсов углов  с выхода ПЗУ 8. Данный вход соединен со входом АЛУ 15, где производится вычисление арктангенса угла
с выхода ПЗУ 8. Данный вход соединен со входом АЛУ 15, где производится вычисление арктангенса угла  . Вычисленное значение поступает на первый вход АЛУ 16. На второй вход данного АЛУ 16 поступает значение
. Вычисленное значение поступает на первый вход АЛУ 16. На второй вход данного АЛУ 16 поступает значение  с выхода АЛУ 9 (3 вход в блок 10), третий вход соединен с выходом ПЗУ 14. Четвертый и пятый входы АЛУ 16 служат для ввода исходных данных о высоте подъема h датчиков блока обнаружения I и удалении S управляемого ЧИЛ III. Вычисления производятся согласно выражению 2.
с выхода АЛУ 9 (3 вход в блок 10), третий вход соединен с выходом ПЗУ 14. Четвертый и пятый входы АЛУ 16 служат для ввода исходных данных о высоте подъема h датчиков блока обнаружения I и удалении S управляемого ЧИЛ III. Вычисления производятся согласно выражению 2.
Работа блока 12 вычисления азимута γ (фиг.6)
На первый вход АЛУ 17 поступают данные о базовом расстоянии l между датчиками обнаружения. Данные поступают с блока ввода исходных данных 11. На второй и третий входы АЛУ 17 поступают данные о координатах источника ЛИ соответственно с выходов АЛУ 9 и АЛУ 7. Вычисления производятся согласно выражению (3) для γ. Выход АЛУ 17 является вторым выходом блока управления II и в дальнейшем поступает на вход управления платформой для ориентации ЧИЛ III в азимутальной плоскости.
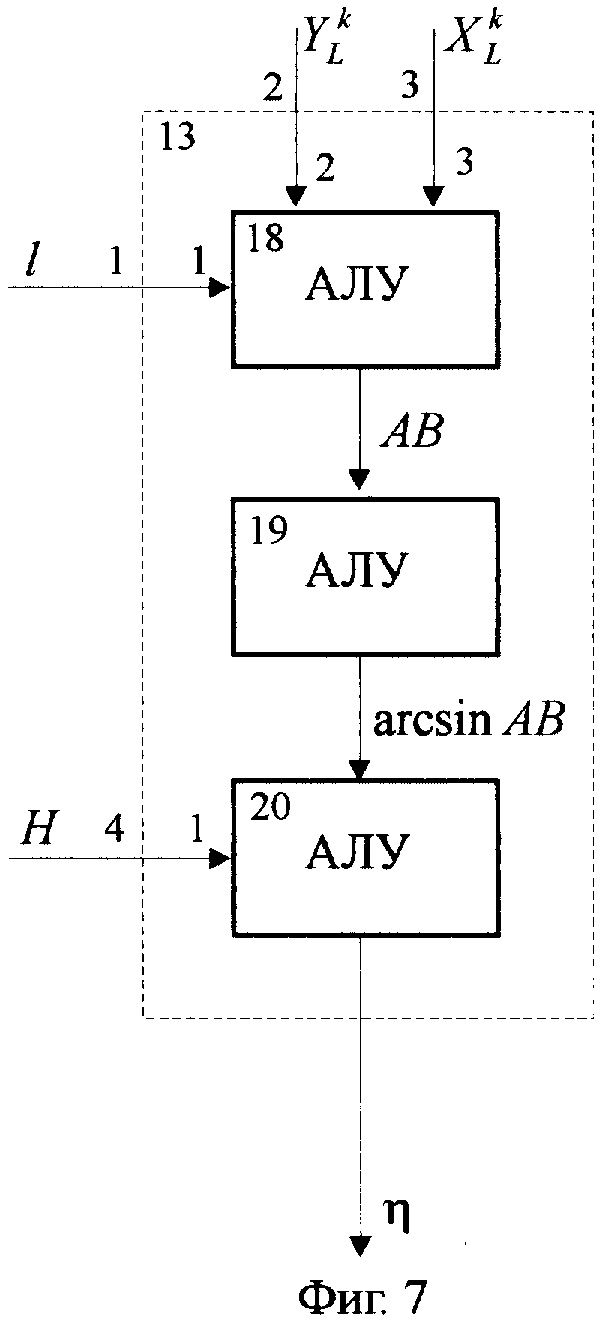
Работа блока 13 вычисления угла места η (фиг.7)
На вход 2, 3 АЛУ 18 поступают данные о координатах источника ЛИ, на вход 1 - данные о базовом расстоянии между датчиками обнаружения. На выходе АЛУ 18 формируется значение АВ (дальности до источника ЛИ), которое поступает на вход АЛУ 19, где вычисляется арксинус данного значения. В АЛУ 20 по значениям arcsin AB и поступающим на вход 4 блока 13 значениям Н (высоты подъема источника ЛИ) с блока 10 производится вычисление угла места η согласно выражению (3). Выход блока 13 соединен со входом управления платформой для ориентации ЧИЛ III в утломестной плоскости.
Для примера во всех блоках могут быть использованы АЛУ типа К155ИП3, К561ИП3.
Литература
1. Устройство и эксплуатация переносного ЗРК “Стрела-3”. - Учебное пособие, Киев, ВАПОСВ, 1979 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1997 |
|
RU2129288C1 |
| СТЕРЕОСКОПИЧЕСКИЙ КОГЕРЕНТНЫЙ ДОПЛЕРОВСКИЙ ЛОКАТОР | 2016 |
|
RU2627550C1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |
| ОБНАРУЖИТЕЛЬ-ИЗМЕРИТЕЛЬ ДОПЛЕРОВСКИХ СИГНАЛОВ | 1991 |
|
RU2017167C1 |
| ЛОКАЦИОННОЕ УСТРОЙСТВО | 1992 |
|
RU2032918C1 |
| ЛАЗЕРНАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1996 |
|
RU2113717C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СТРЕЛКА НА СТЕНДЕ | 1993 |
|
RU2074372C1 |
| СИСТЕМА НАВЕДЕНИЯ ЗЕНИТНЫХ УПРАВЛЯЕМЫХ РАКЕТ БЛИЖНЕГО ДЕЙСТВИЯ | 2006 |
|
RU2324139C1 |
| ПАССИВНАЯ СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ ИЗЛУЧЕНИЯ | 1989 |
|
SU1841037A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО НА ЕГО ОСНОВЕ | 2004 |
|
RU2267797C2 |




Изобретение относится к области автоматики и вычислительной техники и может быть использовано в качестве индикаторного устройства для обнаружения источников лазерного излучения (ЛИ) с последующим противодействием их приемным устройствам. Технический результат заключается в обнаружении источников ЛИ с последующим подавлением фотоприемного устройства системы обнаружения оптоэлектронных объектов. Устройство содержит частотно-импульсный лазер с объективом, закрепленный на вращающихся вокруг вертикальной оси платформах, блок обнаружения, состоящий из двух датчиков обнаружения, и блок управления, содержащий k-триггеров первого и второго датчиков обнаружения, k-элементов И первого и второго датчиков обнаружения, два элемента НЕ, два элемента ИЛИ, два блока кодирования, два ПЗУ, задающий генератор, два арифметическо-логических устройства, блок ввода исходных данных, блок вычисления азимута, блок вычисления угла места и блок вычисления высоты источника ЛИ. 7 ил.
Устройство для обнаружения оптоэлектронных объектов, содержащее частотно-импульсный лазер (ЧИЛ) с объективом, закрепленный на вращающихся вокруг вертикальной оси платформах с возможностью колебательно-вращательного движения ЧИЛ, отличающееся тем, что в него дополнительно введены блок обнаружения, состоящий из двух датчиков обнаружения, блок управления, состоящий из k-триггеров первого и второго датчиков обнаружения, первого и второго элементов ИЛИ, входы которых соединены с выходами k-триггеров первого и второго датчиков обнаружения, а выходы - с входами соответственно первого и второго элементов НЕ; k элементов И первого и второго датчиков обнаружения, выходы которых соединены соответственно с первыми входами k-триггеров первого и второго датчиков обнаружения, а первые входы - с k-выходами первого и второго датчиков обнаружения, первого и второго элементов НЕ, выходы которых соединены соответственно со вторыми входами k элементов И первого и второго датчиков обнаружения; первого и второго блока кодирования, первый вход которых соединен с выходами k-триггеров первого и второго датчиков обнаружения; задающего генератора, выход которого соединен с вторыми входами блоков кодирования; первого и второго постоянных запоминающих устройств (ПЗУ), входы которых соединены с выходами соответствующих блоков кодирования; первого арифметическо-логического устройства (АЛУ), первый вход которого соединен с выходом второго ПЗУ, а второй вход - с выходом первого ПЗУ; второго АЛУ, первый вход которого соединен с выходом первого АЛУ, второй вход - с выходом первого ПЗУ, а второй выход - со вторыми входами k-триггеров первого и второго датчиков обнаружения; блока вычисления высоты источника лазерного излучения, первый вход которого соединен с выходом первого блока кодирования, второй вход - с выходом первого ПЗУ, третий вход - с первым выходом второго АЛУ; блока ввода исходных данных, второй и третий выходы которого соединены соответственно с четвертым и пятым входами блока вычисления высоты источника лазерного излучения; блока вычисления угла места, первый вход которого соединен с первым выходом блока ввода исходных данных, второй вход с выходом первого АЛУ, третий вход - с первым выходом второго АЛУ, четвертый вход - с выходом блока вычисления высоты источника лазерного излучения, а выход является первым выходом устройства; блока вычисления азимута, первый вход которого соединен с первым выходом блока ввода исходных данных, второй вход - с выходом первого АЛУ, третий вход - с первым выходом второго АЛУ, а выход является вторым выходом устройства, при этом первый и второй выходы устройства подключены к вращающимся вокруг вертикальной оси платформам с возможностью колебательно-вращательного движения ЧИЛ, причем первое АЛУ производит вычисления по формуле

где  - углы, под которыми обнаруживается источник лазерного излучения датчиками блока обнаружения; К - число элементов в датчиках блока обнаружения; l - расстояние между датчиками блока обнаружения, которое поступает с первого выхода блока ввода исходных данных.
- углы, под которыми обнаруживается источник лазерного излучения датчиками блока обнаружения; К - число элементов в датчиках блока обнаружения; l - расстояние между датчиками блока обнаружения, которое поступает с первого выхода блока ввода исходных данных.
| УСТРОЙСТВО ДЛЯ ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1997 |
|
RU2129288C1 |
| ЛАЗЕРНАЯ СИСТЕМА ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1996 |
|
RU2113717C1 |
| УСТРОЙСТВО ОБНАРУЖЕНИЯ ОПТОЭЛЕКТРОННЫХ ОБЪЕКТОВ | 1998 |
|
RU2129287C1 |
| Способ определения пространственных координат объекта | 1985 |
|
SU1333004A1 |
| US 5485009 А, 16.01.1996 | |||
| СПОСОБ ПОЛУЧЕНИЯ НЕКУРИТЕЛЬНОГО ИЗДЕЛИЯ ИЗ МАХОРКИ | 2010 |
|
RU2433760C1 |

